
Abstract
This paper presents an output feedback control for the multicellular converter using hybrid systems theory. First, we study the observability of the continuous state of the converter under predetermined finite switching sequence. Using some dynamical properties of the converter, a time independent necessary and sufficient condition is given for the continuous state observability. This interesting condition allows the avoidance of the usual matrix exponential computations for the observability analysis and leads to major notes on the multicellular converter observability. Second, as an application of the above results, we consider the case of the 2-cell converter where we establish a new switching control scheme that guarantees the existence and the finite-time stability of a limit cycle. The corresponding repetitive switching sequence of the limit cycle is used to prove the continuous state observability. We next design a super twisting sliding mode observer that guarantees the finite continuous state convergence. Simulation results confirm the effectiveness and the robustness of the output control scheme under different perturbations: variations of the input voltage and load resistance.








Similar content being viewed by others

References
Meynard TA, Foch H (1992) Multi-level conversion: high voltage choppers and voltage-source inverters. In: 23rd Annual IEEE power electronics specialists conference PESC’92 Record. pp. 397–403
Wilkinson RH, Meynard TA, du Toit Mouton H (2006) Natural balance of multicell converters: the general case. IEEE Trans Power Electron 21(6):1658–1666
Benmiloud M, Benalia A, Defoort M, Djemai M (2016) On the limit cycle stabilization of a DC/DC three-cell converter. Control Eng Pract 49:29–41
Benmiloud M, Benalia A (2016) Finite-time stabilization of the limit cycle of two-cell DC/DC converter: hybrid approach. Nonlinear Dyn 83:319–332
Gateau, G (1997) Contribution la commande des convertisseurs statiques multicellulaires srie : commande non linaire et commande floue, PhD thesis, Institut National Polytechnique de Toulouse
Djemai M, Busawn K, Benmansour K, Marouf A (2011) High-order sliding mode control of a DC motor drive via a switched controlled multi-cellular converter. Int J Syst Sci 42(11):1869–1882. https://doi.org/10.1080/00207721.2010.545492
Gazzam N, Benmiloud M, Benalia A (2015) Observability analysis of multicellular converters: hybrid approach. In: 2015 3rd international conference on control, engineering & information technology (CEIT). IEEE
Defoort M, Van Gorp J, Djemai M (2015) Multicellular converter: a benchmark for control and observation for hybrid dynamical systems. In: Djemai M, Defoort M (eds) Hybrid dynamical systems. Springer, Berlin, pp 293–313
Khelouat S, Laleg-Kirati TM, Benalia A, Djemai M, Boukhetala D (2013) On sliding mode observer for a hybrid three-cell converter. In: 2013 3rd international conference on systems and control, ICSC 2013, pp. 613–618
Goshen-Meskin D, Bar-Itzhack IY (1992) Observability analysis of piece-wise constant systems. I. Theory. IEEE Trans Aerosp Electron Syst 28(4):1056–1067
Benmiloud M, Benalia A, Djemai M (2014) Hybrid sliding mode control for two cells converter. In: 2014 13th international workshop on variable structure systems (VSS). IEEE, pp. 1–6
Van Gorp J, Defoort M, Djemai M, Manamanni N (2012) Hybrid observer for the multicellular converter. In: IFAC proceedings volumes (IFAC-PapersOnline), pp. 259–264
Bejarano FJ, Ghanes M, Barbot J-P (2010) Observability and observer design for hybrid multicell choppers. Int J Control 83:617–632
Liu J, Laghrouche S, Harmouche M, Wack M (2014) Adaptive-gain second-order sliding mode observer design for switching power converters. Control Eng Pract 30:124–131
Ghanes M, Bejarano F, Barbot JP (2009) On sliding mode and adaptive observers design for multicell converter. In: 2009 American Control Conference. IEEE, pp. 2134–2139.
Hauroigné P, Riedinger P, Iung C (2012) Observer-based output-feedback of a multicellular converter: control Lyapunov function—Sliding mode approach. In: IEEE conference on decision and control (CDC), pp. 1727–1732
Defoort M, Djemai M, Floquet T, Perruquetti W (2010) On finite time observer design for multicellular converter. In: Proceedings 2010 11th International workshop on variable structure systems VSS, pp. 56–61
Kang W, Barbot JP (2007) Discussions on observability and invertibility. IFAC Proc 7:426–431
Defoort M, Djemai M, Floquet T, Perruquetti W (2011) Robust finite time observer design for multicellular converters. Int J Syst Sci 42:1859–1868
Benmansour K, De Leon J, Djemai M (2006) Adaptive observer for multi-cell chopper. In: Second international symposium communication control signal process. ISCCSP, pp. 1–4
Gazzam N, Benalia A (2016) Observability analysis and observer design of multicellular converters. In: 2016 8th international conference on modelling, identification and control, pp. 763–767
Gazzam N, Benalia A (2018) Voltage estimation of DC/DC converters. Electrotehnica Electronica Automatica 66(1):73–79
Author information
Authors and Affiliations
Corresponding author
Appendix A
Appendix A
Proof: Firstly, we should demonstrate the asymptotic stability of the region R (Fig. 4). This is done in [20]. Next to that, we will proof the existence of isolated closed trajectory (limit cycle), which will be followed by its stability analysis.
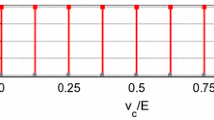
As we mentioned, we have two cases depending on the reference current value. The idea is to analyze the function that transforms the point A on the surface \( v_{c} = 0.5E - \Delta v \) to the point E (under sequence \( \sigma_{1} \) or \( \sigma_{2} \)) on the same surface (Figs. 9, 10).

Ponctual transformation under the proposed control scheme (case 1) in two possible situations

Ponctual transformation under the proposed control scheme (case 2) in two possible situations
To obtain this transformation, we will define the augmented system as follows,
The initial condition of this system is \( X_{0}^{\text{T}} = \left[ {\begin{array}{*{20}c} {x_{0}^{\text{T}} } & 1 \\ \end{array} } \right] \).
1.1 A.1 Case 01(\( I_{ref} < 0.5I_{\rm{max} } \))
Figure 9 represents the steady state in the phase plan under the proposed switching surfaces (case 1). To analyze the punctual transformation, we distinguish two situations:
Situation a (\( i_{a} < I_{ref} - \Delta i \))
We have:
Point A to B:
Point B to C:
Point C to D
Point D to E:
Thus, the punctual transformation is given by,
With the following constraints:
This transformation can be limited to one of the continuous states (Capacitor voltage or load current). This choice is justified by the intersection of the trajectory with the switching surfaces. For that, we will analyze only the load current under the punctual transformation. We have:
With \( C_{aug} = \left[ {\begin{array}{*{20}c} 0 & 1 & 0 \\ \end{array} } \right] \) is the augmented output matrix. We denote \( M = e^{{A_{aug1} t_{4} }} e^{{A_{aug3} t_{3} }} e^{{A_{aug1} t_{2} }} e^{{A_{aug2} t_{1} }} \)
One can simply calculate exponential of the state matrix of mode 1.
The form of the matrix M(or any exponential matrix of the augmented system) is given by
Thus, one can obtain the following results
By comparison, one can find,
Using (A.7) in (A.4), we obtain:
The term \( C_{aug2} MX_{A} \) is null due to the constraints on the switching surfaces (A.3). Therefore, the transformation of the load current from A to E is given by:
Situation b (\( i_{a} > I_{ref} - \Delta i \))
We proved that for any initial current \( i_{a} < I_{ref} - \Delta i \), the punctual transformation leads to \( i_{E} = I_{ref} - \Delta i \) and in this situation, the dynamics of mode 1 leads to the same current \( i_{E} = I_{ref} - \Delta i \)
Thus, the obtained results can be resumed as follows:
This transformation has a unique fixed point \( x_{p}^{T} = \left[ {\begin{array}{*{20}c} {E/2} & {I_{ref} - \Delta i} \\ \end{array} } \right] \); This proofs the existence of the limit cycle under the proposed switching surfaces in case1;
The derivative of the transformation is null, which means that \( x_{p} \) is a super attractive fixed point. This leads to the conclusion that the limit cycle is more than asymptotic stable, it is finite time stable under this control scheme;
1.2 A. 2 Case 02(\( I_{ref} < 0.5I_{\rm{max} } \))
Figure 10 represents the steady state in the phase plan under the proposed switching surfaces (case 2). To analyze the punctual transformation, we distinguish two situations:
Situation a (\( i_{a} > I_{ref} + \Delta i \))
Situation b (\( i_{a} < I_{ref} + \Delta i \))
With same manner, one can found the punctual transformation of the load current in case 2.
Henceforth, the same remarks can be concluded in case 2 where the fixed point of the punctual transformation is \( x_{p}^{T} = \left[ {\begin{array}{*{20}c} {E/2} & {I_{ref} + \Delta i} \\ \end{array} } \right] \).
This ends the proof.□
Rights and permissions
About this article

Cite this article
Ameur, I., Gazzam, N., Benmiloud, M. et al. Output feedback control of multicellular converters. Int. J. Dynam. Control 8, 477–487 (2020). https://doi.org/10.1007/s40435-019-00592-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-019-00592-z