
Abstract
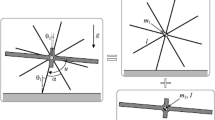
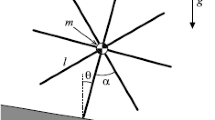
This paper presents the mathematical analysis of steady walking speed and target walking speed generation in 1-DOF limit cycle walking driven by time-settling control inputs. An actuated combined rimless wheel (CRW) model is introduced to analyse the steady walking state when the CRW is walking on level ground. First the initial and terminal boundary conditions driven by discrete stepwise control systems are analysed. The steady step period can be calculated and the target walking period can be generated by the formulas. Second we extend the mathematical analysis to \((n+1)\)-period stepwise control system and derive the general formula of the steady step period. Finally, the continuous piecewise control systems are analysed mathematically by discretizing the control input, and thus the boundary conditions can be analysed by the formula of \((n+1)\)-period stepwise control system. As a result, if the generated walking gait is single-step-cycle, the steady step period can be calculated and target walking steady speeds can be generated by our general formulas in the time-settling control systems.















Similar content being viewed by others

References
McGeer T (1990) Passive dynamic walking. Int J Rob Res 9(2):62–82
Grizzle JW, Abba G, Plestan F (2001) Asymptotically stable walking for biped robots: analysis via systems with impulse effects. IEEE Trans Automat Contr 46(1):51–64
Asano F (2015) Stability analysis of underactuated compass gait based on linearization of motion. Multibody Syst Dyn 33(1):93–111
Asano F (2015) Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture. Multibody Syst Dyn 35(2):191–213
Nanayakkara T, Byl K, Liu H, et al (2012) Dominant sources of variability in passive walking. In: Proceedings of the IEEE international conference on robotics and automation, pp 1003–1010
Hobbelen DGE (2008) Controlling the walking speed in limit cycle walking. Int J Rob Res 27(9):989–1005
Hobbelen DGE, Wisse M (2007) A disturbance rejection measure for limit cycle walkers: the gait sensitivity norm. IEEE Trans Rob 23(6):1213–1224
Zhou K, Kemin J, Doyle C, Glover K (1996) Robust and optimal control, vol 40. Prentice Hall, New Jersey
Coleman MJ, Chatterjee A, Ruina A (1997) Motions of a rimless spoked wheel: a simple three-dimensional system with impacts. Dyn Stab Syst 12(3):139–159
Coleman MJ (2010) Dynamics and stability of a rimless spoked wheel: a simple 2D system with impacts. Dyn Syst 25(2):215–238
Asano F (2011) Stability analysis of passive compass gait using linearized model. In: Proceedings of the IEEE international conference on robotics and automation, pp 557–562
Asano F, Xiao X (2013) Role of deceleration effect in efficient and fast convergent gait generation. In: Proceedings of the IEEE international conference on robotics and automation, pp 5649–5654
Xiao X, Asano F (2014) Analytical solution of steady step period in 1-DOF limit cycle walking driven by stepwise control inputs. In: Proceedings of the IEEE international conference on mechatronics and automation (ICMA), pp 245–250
Coleman MJ, Garcia M, Ruina A et al (1999) Stability and chaos in passive-dynamic locomotion. In: IUTAM symposium on new applications of nonlinear and chaotic dynamics in mechanics. Springer, Netherlands
Xiao X, Asano F (2015) Analytical solution of target steady walking speed in 1-DOF limit cycle walking. In: Proceedings of the 2015 IEEE international conference on robotics and automation, pp 4525–4531
Ridders C (1979) A new algorithm for computing a single root of a real continuous function. IEEE Trans Circuits Syst 26(11):979–980
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xiao, X., Asano, F. Analysis of steady and target walking speeds in limit cycle walking. Int. J. Dynam. Control 5, 454–465 (2017). https://doi.org/10.1007/s40435-015-0212-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-015-0212-z