
Abstract
The assessment of dispersive media may become a challenge due to the high attenuation ratios, anisotropy and geometrical particularities of the specimen under study. Besides, non-contact methods that preserve the integrity of samples are needed when some degree of purity is required, e.g., when water immersion is not allowed, and the direct contact is not feasible. In this work, we study composite plates, in which acoustic dispersion is present. We use a non-contact hybrid optoacoustic system to implement the experimental setup that makes it possible the detection of the non-exposed damages of the samples. Different relevant aspects, such as cost, maximum frequency achieved, bandwidth, sensitivity, signal-to-noise ratio and spatial resolution were considered before setting the experimental configuration. Though dispersion curves are reconstructed, we emphasize the use of the instantaneous information of signals to detect the faults. Moreover, the instantaneous phase front of the acoustic field becomes a relevant complementary tool for ultrasonic inspection and characterization of dispersive media. In particular, it highlights hidden characteristics which are not visible with other commonly-used representations, namely, the instantaneous amplitude, the time-frequency distributions or the dispersion curves widely employed in non-destructive testing. This work provides an alternative approach to study highly attenuating media where the signal-to-noise ratio is a challenge, and the available scanning path is limited, e.g., layered and poroelastic media such as biological tissues.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Non-contact ultrasound (NCU) is a non-destructive technique with several fields of application such as structural health monitoring (SHM), human computer interaction, food, beverage and pharmaceutical industries, vegetable physiology, medicine among others [11, 12, 15, 22, 33, 39]. Using NCU, we can induce waves in layered structures, which allows for the assessment of dispersive media, as well as the detection of changes in geometry and material properties [17, 37]. In particular, plate waves are useful to detect and assess damages such as corrosion, cracks, delamination and debonding, etc., which are of special relevance in SHM [5, 13, 29]. Dispersion is the dependence of phase/group speed on frequency. In unbounded homogeneous solid media, dispersion is a weak effect that can often be neglected. However, in waveguides, e.g., bounded media such as plate-like samples, dispersion becomes strong; thus, large variations in phase speeds are expected. Consequently, the shape of the wave pulse changes as it travels through the medium. Hence, these guided waves become an important source of information about the medium characteristics [31].
Air-coupled ultrasonic transducers (ACTs) and lasers are technologies available for a fast characterization of structures and components [4, 6, 17]. Their main advantage is the non-contact generation and measurement of ultrasonic waves, which allows for a non-intrusive experimental apparatus. For instance, air-coupled ultrasonic spectroscopy technique uses ACTs to generate and measure mechanical waves, as well as to extract properties of the medium. Its most commonly used experimental setup includes a normal incidence of ultrasonic pulses on samples in either pulse-echo or through-transmission mode [14, 34]. Laser-based ultrasound (LBU) techniques use lasers to induce and detect elastic waves at ultrasonic frequencies. Commonly used approaches use photoacoustic implementations, either pulsed or modulated, to extract information from samples based on their response to thermoelastic and/or ablative excitations [8, 36, 40].
This paper is organized as follows: in Sect. 2, we make a thoughtful analysis which aims to ease the selection of the contactless generation detection technology. To do this, we compare four non-contacting configurations usually employed in non-destructive testing, namely, ACT-ACT, ACT-laser, laser-laser and laser-ACT. This analysis weighs up the resolution, simplicity, affordability, bandwidth, maximum achievable frequency, signal-to-noise ratio (SNR) and sensitivity, as meaningful traits of a non-contact implementation. In Sect. 3, we describe the three composite materials under study, the experimental setup and the theoretical framework that support the detection of the hidden damages. Particularly, we give a practical application to the instantaneous phase (IP) of the signals which is highly sensitive to the variation of the elastic constants in dispersive media. In Sects. 4 and 5, we discuss the experimental results. At the end, we present the main conclusions of this work.
2 Non-contact technology for the assessment of dispersive media
NCU systems are powerful; however, their pros and cons make not always easy to select the most suitable configuration. Thus, an application-dependent trade off must be faced when selecting the most appropriate setup. In this section, we discuss four possible configurations that enable the assessment of dispersive media employing guided waves through non-contact apparatus: an all-acoustic, all-optic and two hybrids.
An all-acoustic configuration is perhaps the cheapest option to be implemented, e.g., implementations that employs ACTs fabricated with piezo-composites require an approximate budget of 10 thousand USD. Its principle of operation is based on the proper selection of critical angles to accomplish the rule of coincidence [24]. Accordingly, there exists a relationship among the impinging angle, the frequency of the sound wave and the maximum acoustic energy transmitted through the sample. When an ultrasonic inspection is aimed, the selection of a single impinging angle may be enough for a successful detection/identification of defects. However, when the estimation of mechanical or geometrical properties of samples is intended, either from their dispersive behavior or by means of time-of-flight-based techniques, a precise angular sweep is required at both ends, emission and reception, regardless of the operation mode, i.e., through transmission or pitch-catch. As long as the impedance mismatch with the air is overcome, a good SNR is achieved.
Nevertheless, this system provides a low spatial resolution when typical flat surface ACTs are used. To overcome this drawback, some alternatives are the use of concave transducer or passive lenses, e.g., Gomez et al [16] and Takahashi et al. [38] reported lateral resolutions of less than 2.5 mm and \(150 ~ \upmu m\), respectively. Although at high frequencies the absorption in the air imposes an additional difficulty to achieve high quality implementations, useful results can be obtained at frequencies below 2 MHz. Notwithstanding, special attention must be paid to hygroscopic properties of the materials used to fabricate the matching layers. In some cases, because of the porous nature of the layers of some ACTs, the moisture of the air surrounding may change the dynamic response of the transducer, which may also affect the stability of a sample characterization procedure. In this case, a continuous monitoring of the incident signal results is necessary, which may become an important disadvantage for outdoor operation, i.e., field conditions. Under these circumstances, capacitive transducers are a good alternative as long as the radiating surface is impermeable/waterproof and, at the same time, exhibit a sufficiently wide bandwidth, though at higher prices to obtain a successful implementation.
An all-optical system is definitely not a low cost option at the present. Market costs are much higher than its all-acoustic counterpart. They are at least one order of magnitude more expensive (without including an anti-vibratory table and additional optics). The better the performance of the emission laser the higher the cost of the system. No precise settling of the impinging angle is required; however, an oblique incidence is recommended to avoid damage of the internal optics of the device when highly reflected samples are impinged. Depending on the application, the requirements and regimes of operation, the sample itself, the geometric properties of the beam, along with its wavelength and energy should be properly selected [7, 21]. In the linear regime, in general, pulsed lasers allow for a wider bandwidth-guided wave when compared to the ACT excitation. This is desirable when the dispersive behavior of the sample is intended, as well as when high axial resolution is required. As a rule of thumb, the larger the cross section of the beam the narrower the bandwidth, for a given pulse duration. Moreover, a direct optical impinging of the pulsed laser beam on the sample is not mandatory. There is also possible to induce plate waves by means of a plasma-induced shock wave generated at a short distance from the surface of the sample [20]. This alternative is particularly useful when testing delicate/soft samples and a no damage condition is compulsory.
In reception, an excellent commercial solution is a laser Doppler vibrometer (LDV), which allows for spatial resolutions up to 0.1 mm or even better. As long as a good SNR is achieved, it permits the capture of a precise time-spatial picture of the wave modes, which results in a high-fidelity instantaneous information of the amplitude and the phase of the wave [9, 32]. Once these data are available, several methods are accessible for extracting the dispersive behavior of the sample [23, 25, 26, 35]. Also, other alternative detection systems are possible, e.g., using a self-mixing interferometer [10] or a two-wave mixing interferometer may result advantageous when dealing with samples of low surface reflectance [2, 18], though it may imply a more expensive implementation if commercially available solutions are employed.
Finally, we consider the hybrid systems, in which experimental setup consists of a mixing of lasers and ACTs. These are a practical intermediate option that aims to combine the best of both technologies. Two configuration options are possible depending on which of the technologies is used for emission or reception, i.e., acoustic emission and optical reception or vice versa. In the former case, the settling of a single critical angle for emission allows for the generation of a broadband-guided wave, as long as a wide bandwidth ACT be used. The traveling wave, induced in the sample, can be fully captured using a LDV. As a result, the extracted dispersion diagram includes spectral responses in a wide frequency range. This is the experimental configuration used in this work. The generation of the wave is not subjected to the sample optical absorption nor to the thermoelastic/ablation regimes. Also, thanks to the LDV capabilities, e.g., its high spatial resolution and wide bandwidth, the dispersion properties of the sample can be extracted in a fast way using a mechanical scanning system. Perhaps, an immediate challenge to address is the variation of the refractive index that may occur in the air gap between the LDV’s head sensor and the sample. This effect is barely reported in literature but it is noticeable when reflection from leaky waves or external sources intersect the beam laser [1, 41]. In view of this, a through-transmission operation mode may result more appropriate than a pitch-catch configuration under some circumstances.
As it was previously stated, the ACTs are suitable for applications below 2 MHz; thus, it is feasible to track zero-order plate modes without sacrificing sensitivity, bandwidth or spatial resolution. This is quite relevant for defect detection/identification using guided waves in both translucent and opaque materials. When the sample material is highly absorptive at the LDV wavelength; hence, it exhibits a low reflectance, the second hybrid configuration is a suitable option, i.e., using a laser in emission, either pulsed or modulated, and an ACT/microphone in reception [17, 27]. This solution requires a receiver with a frequency response in the bandwidth of analysis. Also, the adjustment of the receiver angle with respect to the sample is needed to maximize the reception of the leaky/transmitted wave coming out to the surrounding air. The most appropriate reception angle mainly depends on the SNR and on the bandwidth of the selected ACT.
In summary, there are different aspects to consider when an implementation of a NCU system is intended for generation/detection of guided waves. The proper technology selection depends on the application, cost, acoustic and optical properties of the medium under study, spatial resolution and whether it is for inspection or characterization. Sensitivity, bandwidth and maximum frequency of operation are also relevant parameters to take into account.

Comparison of the NCU implementations for guided wave analysis, based on ACT (T) and laser (L) technologies. The location of the letters T and L in first and second position indicates the emitting and receiving technology, respectively
Figure 1 aims to condensate a relevant comparison criterion to guide the reader in the technology selection process. We have used a 0–5 scoring scale to indicate, respectively, the worst and the best expected performance among the four implementations under comparison. Using a LDV improves the SNR and the spatial resolution, as long as the target surface has a high reflectance at the wavelength of operation, which also guarantee a good sensitivity (for opaque surfaces, a thin film of reflective tape is a rapid solution in many cases). Moreover, when we compare the ACT and the LDV, the latter provides a higher sensitivity at higher distances from the sample. Thus, the LDV is selected as the best choice for receiving the acoustic response of the samples.
In emission, an optical solution is a better option when a wide bandwidth and high frequencies are required. However, an additional experimental apparatus is usually needed to control the laser energy that impinges the sample. This becomes quite important when working with delicate samples in which damage is not desirable, e.g., biological tissues. Regarding the affordability, which is a measure of the inexpensiveness of a system, the all-optical system was scored with the lowest value because it is the most expensive of all implementations. In contrast, the all-acoustic is the most affordable. To address this characteristic is a difficult goal as technologies and their respective costs are evolving continuously. However, we can note a significant gap between the budget required to implement acoustical and optical technologies, e.g., for an all-acoustic system, a budget of approximately 10 thousand USD is enough; however, for a reliable all-optical system, there is needed a budget of at least 100 thousand USD. With respect to the ease of implementation, i.e., simplicity, we consider that using a LDV at the reception stage results in an efficient, versatile, robust and straightforward operation. In emission, the ACT provides the easiest way to excite acoustic waves as long as the critical angle is adjusted and no additional equipment is needed to avoid damage in the sample.
3 Materials and methods
3.1 Samples under study

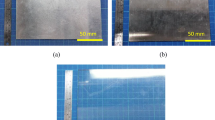
Description of the samples studied in this work. (a) a bi-layer aluminum(Al)–steel(St) plate. B1 and B2 stand for the first and second boundaries of the St layer, respectively. (b) and (c) show the CFRP plate. (d) and (e) show the GFRP plate. (c) and (e) are the images of a transverse cut of the CRFP and GFRP plates, respectively. A sketch of the scanning path of the LDV is represented by red points in (a), (b) and (d). Though damages are visible in (b) and (c), the scanning was made on the side where they were not exposed
In this work, we use the plates shown in Fig. 2. Their properties are described below:
-
Bi-layer plate Al–St, Fig. 2a, is a two layer sample consisting of a steel plate (1 mm thickness, longitudinal and transverse speeds of 5820 m/s and 3190 m/s, respectively), attached to an aluminum plate (1 mm thickness, longitudinal and transverse speeds of 6320 m/s and 3070 m/s, respectively). The plates were bonded using a Loctite super bonder precision adhesive (Henkel, USA).
-
Carbon fiber-reinforced polymer plate (CFRP), Fig. 2b, total thickness of 1.85 mm. It consists of two layers of weaved carbon fibers at the upper and lower surfaces with a polyester foam in the middle, see Fig. 2c. The plate contains a notch damage with lateral dimensions of 2.95 mm \(\times\) 7.45 mm and a depth of 1.35 mm.
-
Glass fiber-reinforced polymer plate (GFRP), Fig. 2d, total thickness of 1.20 mm. It is fabricated by using glass fiber mixed with vinyl ester resin, see Fig. 2e. It contains a notch damage with lateral dimensions of 3.30 mm \(\times\) 9.60 mm and a depth of 0.8 mm.
3.2 Experimental setup

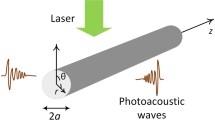
Hybrid NCU system that combines an ACT and a LDV. \(\theta\) is the impinging angle of the plane wave generated by the ACT. LDV: laser Doppler vibrometer, LDV-C: LDV controller, LPU: linear positioning unit, LPU-C: LPU controller, PR: pulser-receiver, Tx: emitting ACT
The proposed experimental setup is a transmission-through configuration, see Fig. 3. The emission branch involves and ACT centered at 250 kHz (Dasel Sistemas, Madrid, Spain). This is excited by a pulser-receiver (PR5077, Olympus, USA), with a 400-Vp pulse at a repetition frequency of 100 Hz. The detector is a LDV (OFV-505 & OFV-5000, Polytec, Germany). Signals of 2500 samples, captured at 2.5 MS/s and 5 MS/s for the Al–Steel and GFRP/CFRP samples, respectively, are digitized by an oscilloscope (TDS2014C, Tektronix, USA) and then stored in a PC. A signal averaging of eight captures was employed in order to increase the signal-to-noise ratio. Furthermore, the offset of each acquired signal was removed and a low-pass filter (Butterworth, 5th order) with a cutoff frequency of 500 kHz was applied. We did not employ any window function to process the signals. A linear positioning unit (ET-300-11, Newmark systems, USA) allowed us to simultaneously move the sample and the Tx while the LDV remains at a fixed position. We also used pieces of absorbing foam between the sample holder and the plate to emulate a free standing boundary condition.
3.3 Data processing
We plot the distance versus time relationship of the plate wave traveling through the samples under study, i.e., the characteristic diagram. To do this, we simultaneously store every signal detected by the LDV, i.e., each A-Scan, and the position of the corresponding observation point, as is shown in Fig. 3. Thus, each scan involves a dataset that contains the out-of-plane velocity (vibratory response) measured at the surface of sample, the time vector and the location of the observation points. In this work, we employ two different time-domain representations, namely, the instantaneous amplitude and phase. The former is commonly known as the B-Scan of the sample, which mainly consists of the amplitudes of the waveforms captured at the observation points. The latter, which, as far as we are concerned, has not yet been reported in the literature as a tool for damage detection, comprises the phase fronts of the signals as the wave propagates through the medium [3]. The instantaneous phase results from the computation of the angle of the analytical signal obtained from the application of the Hilbert transform to a given detected waveform [28].
We also analyzed the acquired wave information in frequency domain via the dispersion diagrams, which are obtained by applying the two-dimensional fast Fourier transform (2D-FFT) to the B-Scan of the acquired waveforms [19]. We employed the 2D-FFT algorithm already available in the Python SciPy toolbox. Consequently, the instantaneous diagram that plots position versus time, i.e., x-t, is converted to wavenumber versus frequency, i.e., k-f.
3.4 Dispersion phenomenon and instantaneous phase (IP)
The mechanism by which the plate waves are induced in the samples is given by the rule of coincidence, as follows [24]:
where \(c_\textrm{air}\) is the speed of the sound in the surrounding air, \(c_p\) is the phase speed of the guided wave in the plate and \(\theta\) is the critical impinging angle.
In Eq. (1), the critical angle is a function of frequency, i.e., for each frequency, there is a particular impinging angle which induces a guided wave that propagates at a specific phase velocity. If the ACT is wide bandwidth it is observed the dispersion phenomenon, i.e., the phase speed of the plate wave changes with frequency.
The simplest dispersion model for a guided wave is given by the Rayleigh–Lamb equations. Below are the equations for a free standing, single-layer, isotropic and homogeneous plate, i.e., an effective model for the propagation of plate waves [31]:
where the \((+)\) and \((-)\) in the exponent correspond to the symmetric and antisymmetric propagating modes, respectively. h is plate-thickness, \(\omega\) is angular frequency, k is wavenumber, and \(c_L\) and \(c_T\) are the longitudinal and transverse bulk speeds of the medium, respectively.

Representation of the symmetric and anti-symmetric wave modes predicted by the Rayleigh–Lamb equations for an isotropic plate under free standing boundary condition. Arrows indicate the displacement distribution at each surface of the plate as the wave modes propagate
Figure 4 shows the displacement field for each propagating mode at each surface. Note that symmetric and anti-symmetric wave modes result from the combination of in-plane and out-of-plane particle vibrations. Equation (2) links the independent variables \(\omega\) and k to the geometrical and mechanical properties of the medium. Thus, the phase speed of the plate wave depends on those properties and can be computed as \(c_p=\omega / k\). Though several phase speeds can happen at the same frequency [30, 31], in this work, we will limit our discussion to the zero-order anti-symmetric mode (\(A_0\)). This is the mode observed in our experiments.
To find a relationship between the instantaneous and the steady-state information contained in the guided wave, we start by considering the most general solution (1-D) for the homogeneous wave equation, as follows [3]:
where x is position and t is time, u is particle displacement and g represents any arbitrary function.
The term \(\phi = x - c_p t\) in Eq. (4) is the phase of the wave. It defines the phase fronts of the wave. The behavior of \(\phi\) can be represented graphically by plotting x versus t, i.e., drawing its characteristic diagram, where the slope of each front phase is the phase speed at every time.
Thus, the phase speed can be interpreted as the rate at which a given phase advances through the medium, see Fig. 6. Moreover, the definition of \(\phi\) leads to the following relationship:
Equation (5) states that given the instantaneous behavior of a traveling wave, the dispersion phenomenon can be observed in both the time and the frequency domains. Since dispersion is controlled by the geometry and the elastic properties of the plate, see Eq. (2), the IP provides information about the variation of those properties as the medium changes. Furthermore, the transient information contained in the IP is complementary to the steady-state data obtained from the \(\omega\)-k chart.
Next, we will show how the representation in terms of the IP can be used to follow a given phase front within the wave and hence how it allows for the detection of discontinuities or damages.
4 Detection of hidden discontinuities in a bi-layer plate

Dispersion curve obtained for the bi-layer Al–St plate. The dispersion curves for Al (asterisks) and St (dots) were computed using the Rayleigh–Lamb equations
Figure 5 shows the experimental dispersion curve obtained for the bi-layer Al–St plate. To get the plane k-\(\omega\), we applied the two dimension fast Fourier transform (2D-FFT) to the characteristic diagram x-t, which is obtained experimentally, see Figs. 2a and 3. The scanning path is located in the plane side of the plate, i.e., where the joint Al–St is not visible. Due to the bandwidth of the ACT, we are able to induce a low frequency plate-wave mode, i.e., the \(A_0\). The zero order symmetric mode (\(S_0\)) is not observed because of the characteristics of our LDV. It is a one axis vibrometer sensitive to the out-of-plane vibration; thus, it is quite responsive to anti-symmetric deformations. To confirm the presence of the \(A_0\) mode, we plot the theoretical dispersion curves for Al and St replacing their respective properties in Eq. (2). Because of the similarity between the longitudinal and transverse speeds for Al and St, their dispersion curves are pretty close at low frequency.
Figure 5 shows a slight shift of the experimental mode respect to that expected for Al and St. Notwithstanding, it is not strong enough to conclude that the medium is changing, e.g., looking at Fig. 5 we can not assert that the typical behavior of Al is disrupted. Since the \(A_0\) mode does not highlight the discontinuity of the plate, a new source of information is required to distinguish the changes that happen in the Al plate. To do this, we employ the instantaneous information of the acquired signals.

Characteristic diagram for the bi-layer Al–St plate. The vertical discontinuous lines correspond to the first (20 mm) and second (100 mm) edges of the steel lamina. Accordingly, R1 and R2 are the echoes from these borders. The color bar is given in dB. Every borderline of a trace is an IP of the waveform
Figure 6 shows the instantaneous information obtained for the Al–St plate. The borderlines correspond to the IP, and the colored zones are the amplitudes in dB. To obtain the representation shown in Fig. 6 we calculated the analytic signal [28] by means of the Hilbert transform of every signal detected by the LDV. The IP and amplitude correspond to the angle and the real part of the analytic signal, respectively. The reflections of the IP, i.e., R1 and R2, are enough to detect the geometry discontinuities beneath the Al layer. Besides, the projection of each reflected IP points to the location of the two boundaries B1 and B2 of the St layer, see Figs. 2a and 6. In Fig. 6, the slopes of every IP are equal; hence, Eq. (5) results in the same phase speed at all frequencies. This coincides with the linear trend observed in Fig. 5 within the bandwidth of the ACT (250 kHz ± 30%).

Maximum of the envelope of the signals acquired along the scanning path in the Al–St plate. Data are plotted in dots and its trend is suggested with the continuous line. The vertical discontinuous lines represent the location of the first (B1) and second (B2) edges of the St layer
To analyze the effect of every boundary imposed by the steel plate, we study the amplitude decline of the wave. To do this, we compute the envelope of every waveform (the absolute value of the analytic signal) and plot it in Fig. 7 as a function of the traveled distance. The curve has been normalized with respect to the maximum of the dataset. At the first boundary, i.e., B1 in Fig. 2a, the amplitude decays \(\sim\)55% with respect to the start point (x = 0 mm). At the second boundary, i.e., B2 in Fig. 2a, the change of the amplitude is less significant (\(\sim\)10%). This phenomenon can be attributed to the direction of propagation of the wave (we verified visually good sticking between the Al and St plates): when the wave is entering edge B1 it comes from a lower to a higher section. In contrast, in edge B2, the wave passes from a higher to a lower section. Hence, the reflected energy is higher in the former case than in the latter. This is observed in Fig. 6 where the reflection R1 has an amplitude approximately equal to the forwarding wave entering the steel section. In contrast, the reflection R2 has a lower amplitude compared to the forwarding wave leaving edge B2.
5 Detection of hidden damages in composite plates

Characteristic diagram obtained for two composite plates: GFRP, (a) and (c), and CFRP, (b) and (d). We plot the normalized envelope, (a) and (b), and the IP, (c) and (d). The vertical discontinuous lines indicate the notch position in each plate
Figure 8 shows the instantaneous envelope and IP obtained for the GFRP and the CFRP plates of Figs. 2b–e. The envelope is enough to detect the notch damage in the GFRP plate, see Fig. 8a. Note the increase in the amplitude just above the defect. At that location, the medium allows for a higher deformation due to the reduced thickness of the sample, i.e., the plate reduces its stiffness at that zone. Accordingly, the IP shows reflections from the edge of the notch, see Fig. 8c. Besides, the slope of the IP is increased at the notch position, which implies a decline of the phase velocity (\(\downarrow c_p\)) at that location due to the decrease in the elastic modulus. Just before and after the notch, the slopes of the IPs are equal, which verifies that the phase speed in a zone without damage is the same. Additionally, we extract the maximum of the envelope and plot it against the position. Figure 9a shows that the envelope jumps 80% when the LDV is above the defect, i.e., the deformation of the plate at the damaged zone is higher compared with a pristine zone. Besides, the rate at which energy decay before and after the notch is the same. This can be verified by computing the slope of the continuous line of Fig. 9a (\(\sim\) 2% per millimeter).

Maximum envelope amplitude at every position along the scanning path in the GFRP, (a), and the CFRP, (b). Data are plotted in dots and its trend is suggested with the continuous line. Vertical discontinuous line indicates the notch position in each plate
Regarding the CFRP sample, Figs. 8b and 9b do not show any significant variation in the amplitude of the envelope above the place where the notch is located. Figure 9b shows a typical attenuation behavior with distance. Nevertheless, Fig. 8d shows that the reflections of the IPs highlight the presence of the damage beneath the surface. In contrast with Fig. 8c, there is not observed a visible change in the slope of the IPs, i.e., the phase velocity of the induced mode is not sensitive to the notch of the CFRP. This agrees with the behavior observed in Fig. 9b, which implies that no significant variation in stiffness was detected. Since the thicknesses of both composite samples are similar (0.5 mm and 0.4 mm for CFRP and GFRP plates, respectively), the IP is a way to compare how different are the stiffnesses of both plates. Since the current proposal is a fast and middle cost implementation to detect damages, complementary studies must be carry out in order to assess the implications of the notches in the stiffness of the samples.
6 Conclusions
In this work, we started by discussing four different, non-contact, experimental configurations to generate and detect guided waves in plate-like samples (see Fig. 1). A short answer is not possible when asking for which implementation is better. Each configuration has its own advantages and limitations. However, we have shown experimentally that it is possible to generate and measure guided waves in composite plates using a fast and middle-cost hybrid implementation. It is suitable to access the dispersive characteristics on several mediums (single- and multi-layer, isotropic and anisotropic, homogeneous and non-homogeneous). Also, we have presented the IP as a relevant complementary source of information, which allows for the assessment of the interaction between the propagating wave and the discontinuities present in the samples under study. Further research is currently being conducted on the use of the IP in the quantitative non-destructive evaluation of components and also in the analysis of dispersion in complex media, e.g., vegetable tissues.
The proposed hybrid opto-acoustic approach allows for a high spatial resolution scanning while employing a low-cost and non-destructive emitting source. Furthermore, this system enables the generation of plate waves in a frequency range inside the bandwidth of the emitting ACT, as long as the phase speed of the wave in the sample is higher than that of the sound in the surrounding air. We studied three different plate samples, namely, a bi-layer Al–St, and glass/carbon fiber reinforced polymer plates. These plates contained hidden discontinuities/damages beneath the scanning path, which were detected in all cases using the IP.
The current modernization of the agroindustry and the industry 4.0, which involve the use of methods of artificial intelligence and the Internet of things, demands the sophistication of the perception layer and the generation of massive data. This way, the current proposal paves the way toward an automatic and non-destructive source of data, that allows for the implementation of embedded solutions at low cost to assess complex media such as biological tissues and poroelastic layered media.
References
Bahr L, Lerch R (2008) Beam profile measurements using light refractive tomography. IEEE Trans Ultrason Ferroelectr Freq Control 55(2):405–414. https://doi.org/10.1109/tuffc.2008.658
Berer T, Hochreiner A, Zamiri S et al (2010) Remote photoacoustic imaging on solid material using a two-wave mixing interferometer. Opt Lett 35(24):4151. https://doi.org/10.1364/ol.35.004151
Blackstock DT (2000) Fundamentals of physical acoustics, 1st edn. Wiley, New Jersey
Castaings M, Hosten B (2000) Air-coupled measurement of plane wave, ultrasonic plate transmission for characterising anisotropic, viscoelastic materials. Ultrasonics 38(1–8):781–786. https://doi.org/10.1016/s0041-624x(99)00036-0
Chen J, Li Z, Gong K (2017) Nondestructive testing method based on lamb waves for localization and extent of damage. Acta Mech Solida Sin 30(1):65–74. https://doi.org/10.1016/j.camss.2016.06.001
Chimenti DE (2014) Review of air-coupled ultrasonic materials characterization. Ultrasonics 54(7):1804–1816. https://doi.org/10.1016/j.ultras.2014.02.006
Collazos-Burbano DA, Melo-Luna CA, Ealo JL et al (2018) Generation of ultrasonic waves in vegetable tissue via non-ablative laser pulses. J Acoust Soc Am 143(3):1960–1960. https://doi.org/10.1121/1.5036440
Collazos-Burbano DA, Cuello JLE, Villagrán-Muniz M (2020) Propagation of ultrasonic guided waves in plant leaves. J Phys D Appl Phys 54(9):95,401. https://doi.org/10.1088/1361-6463/abc991
Collazos-Burbano DA, Cuello JLE, Villagrán-Muniz M (2021) Ultrasonic wave propagation for smart agriculture: an arabica coffee case of study. In: 2021 IEEE UFFC Lat. Am. Ultrason. Symp. IEEE, Gainesville, FL, USA, pp 1–4. https://doi.org/10.1109/LAUS53676.2021.9639172
Contreras V, Lonnqvist J, Toivonen J (2015) Edge filter enhanced self-mixing interferometry. Opt Lett 40(12):2814. https://doi.org/10.1364/ol.40.002814
Dahl T, Ealo JL, Bang HJ et al (2014) Applications of airborne ultrasound in human-computer interaction. Ultrasonics 54(7):1912–1921. https://doi.org/10.1016/j.ultras.2014.04.008
Ealo J, Camacho J, Seco F, et al (2010) Ultrasonic aircoupled inspection of textile materials using ferroelectret-based phased arrays. In: AIP Conf. Proc. AIP, Kingston (Rhode Island), pp 933–940. https://doi.org/10.1063/1.3362529
Fakih MA, Mustapha S, Tarraf J et al (2018) Detection and assessment of flaws in friction stir welded joints using ultrasonic guided waves: experimental and finite element analysis. Mech Syst Signal Process 101:516–534. https://doi.org/10.1016/j.ymssp.2017.09.003
Gómez Álvarez-Arenas T, Soto DA (2012) Characterization of mineral paper by air-coupled ultrasonic spectroscopy. Ultrasonics 52(6):794–801. https://doi.org/10.1016/j.ultras.2012.02.012
Gómez Álvarez-Arenas T, Gil-Pelegrin E, Ealo Cuello JL et al (2016) Ultrasonic sensing of plant water needs for agriculture. Sensors (Switz) 16(7):1–20. https://doi.org/10.3390/s16071089
Gómez Álvarez-Arenas TE, Camacho J, Fritsch C (2016) Passive focusing techniques for piezoelectric air-coupled ultrasonic transducers. Ultrasonics 67:85–93. https://doi.org/10.1016/j.ultras.2016.01.001
Green RE (2004) Non-contact ultrasonic techniques. Ultrasonics 42(1):9–16. https://doi.org/10.1016/j.ultras.2004.01.101
Hochreiner A, Reitinger B, Bouchal KD et al (2013) Quasi-balanced two-wave mixing interferometer for remote ultrasound detection. J Mod Opt 60(16):1327–1331. https://doi.org/10.1080/09500340.2013.837981
Hora P (2012) Determination of Lamb wave dispersion curves by means of Fourier transform. Appl Comput Mech 6:5–16
Hosoya N, Yoshinaga A, Kanda A et al (2018) Non-contact and non-destructive Lamb wave generation using laser-induced plasma shock wave. Int J Mech Sci 140:486–492. https://doi.org/10.1016/j.ijmecsci.2018.03.023
Huke P, Schröder M, Hellmers S et al (2014) Efficient laser generation of Lamb waves. Opt Lett 39(20):5795–5797. https://doi.org/10.1364/OL.39.005795
Hutchins DA, Wright WMD, Schindel DW (1994) Ultrasonic measurements in polymeric materials using air-coupled capacitance transducers. J Acoust Soc Am 96(3):1634–1642. https://doi.org/10.1121/1.410243
Kim YH (2004) Determination of phase velocity dispersion curves and group velocity in a plate using backward radiated leaky lamb waves. In: AIP Conf. Proc. AIP, Green Bay, Wisconsin (USA). https://doi.org/10.1063/1.1711618
Luukkala M, Heikkila P, Surakka J (1971) Plate wave resonance—a contactless test method. Ultrasonics 9(4):201–208. https://doi.org/10.1016/0041-624X(71)90387-8
Pabisek E, Waszczyszyn Z (2015) Identification of thin elastic isotropic plate parameters applying guided wave measurement and artificial neural networks. Mech Syst Signal Process 64–65:403–412. https://doi.org/10.1016/j.ymssp.2015.04.007
Pai PF, Deng H, Sundaresan MJ (2015) Time-frequency characterization of lamb waves for material evaluation and damage inspection of plates. Mech Syst Signal Process 62–63:183–206. https://doi.org/10.1016/j.ymssp.2015.03.011
Pathak M, Alahakoon S, Spiryagin M et al (2019) Rail foot flaw detection based on a laser induced ultrasonic guided wave method. Measurement 148(106):922. https://doi.org/10.1016/j.measurement.2019.106922
Picinbono B (1997) On instantaneous amplitude and phase of signals. IEEE Trans Signal Process 45(3):552–560. https://doi.org/10.1109/78.558469
Pieczonka Ł, Ambroziński Ł, Staszewski WJ et al (2017) Damage detection in composite panels based on mode-converted Lamb waves sensed using 3D laser scanning vibrometer. Opt Lasers Eng 99:80–87. https://doi.org/10.1016/j.optlaseng.2016.12.017
Rokhlin S, Chimenti D, Nagy P (2011) Physical ultrasonics of composites, 1st edn. Oxford University Press, New York
Rose J (2004) Ultrasonic waves in solid media, illustrate edn. Cambridge University Press, New York
Rothberg SJ, Allen MS, Castellini P et al (2017) An international review of laser Doppler vibrometry: making light work of vibration measurement. Opt Lasers Eng 99:11–22. https://doi.org/10.1016/j.optlaseng.2016.10.023
Saggin R, Coupland JN (2001) Non-contact ultrasonic measurements in food materials. Food Res Int 34(10):865–870. https://doi.org/10.1016/S0963-9969(01)00110-7
Sancho-Knapik D, Calás H, Peguero-Pina JJ et al (2012) Air-coupled ultrasonic resonant spectroscopy for the study of the relationship between plant leaves’ elasticity and their water content. IEEE Trans Ultrason Ferroelectr Freq Control 59(2):319–325. https://doi.org/10.1109/TUFFC.2012.2194
Schaal C, Bischoff S, Gaul L (2013) Analysis of wave propagation in periodic 3D waveguides. Mech Syst Signal Process 40(2):691–700. https://doi.org/10.1016/j.ymssp.2013.06.021
Scruby C, Drain L (1990) Laser ultrasonics techniques and applications, 1st edn. CRC Press, New York
Su Z, Ye L (2009) Identification of damage using lamb waves: from fundamentals to applications, vol 48, 1st edn. Springer, Berlin
Takahashi S (2012) Properties and characteristics of P(VDF/TrFE) transducers manufactured by a solution casting method for use in the MHz-range ultrasound in air. Ultrasonics 52(3):422–6. https://doi.org/10.1016/j.ultras.2011.10.002
Takahashi S, Ohigashi H (2009) Ultrasonic imaging using air-coupled P(VDF/TrFE) transducers at 2 MHz. Ultrasonics 49(4–5):495–8. https://doi.org/10.1016/j.ultras.2008.10.020
Tam AC (1986) Applications of photoacoustic sensing techniques. Rev Mod Phys 58(2):381–431. https://doi.org/10.1103/RevModPhys.58.381
Zhao Y, Shen ZH, Lu J et al (2008) Numerical simulation and experimental detection of leaky Lamb waves induced by pulse laser at air-solid interfaces. Sci China Ser G Phys Mech Astron 51(6):607–616. https://doi.org/10.1007/s11433-008-0066-x
Acknowledgements
This work has been funded by the Colombian Science, Technology and Innovation Fund-General Royalties System (Fondo CTel-SISTEMA GENERAL DE REGALIAS, contract BPIN 2017000100062, project: “Desarrollo experimental de un prototipo de vehículo eléctrico en el sector automotriz del departamento del Valle del Cauca”), and by the Project for Doctoral Students Support at Universidad del Valle (CI 21143). Also, we would like to acknowledge to Structural Synergy S.A.S who provided the composite plates.
Funding
Open Access funding provided by Colombia Consortium.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Technical Editor: Samuel da Silva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Collazos-Burbano, D.A., Ealo, J.L. & Orrego-Gonzalez, A. Non-contact detection of hidden damages in dispersive media using the instantaneous phase. J Braz. Soc. Mech. Sci. Eng. 45, 300 (2023). https://doi.org/10.1007/s40430-023-04207-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-023-04207-9