
Abstract
The ability to mitigate the vibrations by a magnetorheological elastomer (MRE) isolator varies with the amplitude of the excitation and the magnetic field. To implement semi-active vibration control, a mathematical model representing the dynamic response over a wide frequency range is crucial. In the present study, an attempt was made to develop a mathematical model for the designed MRE isolator over a wide frequency range under different operating conditions. A model-based fuzzy controller was developed to implement semi-active control attributes over a broadband frequency. The methodology entails that the MRE isolator operating in shear mode was designed. The performance of the isolator was evaluated over a frequency range of 15–80 Hz with varying input currents and excitation amplitudes. The transmissibility response of MRE isolator was mathematically represented using viscoelastic constitutive relations. The isolator system was represented in state-space form, and its parameters were determined by minimizing the mean square error between experimental and model responses. A polynomial function was used to generalize variations in viscoelastic model parameters with respect to the input current. Based on the controller stopping frequency, a relationship was established between the current input to the MRE isolator and the excitation amplitude. Using the mathematical equations, a model-based fuzzy controller was developed and tested in simulation and real-time conditions. The results show that the controller effectively isolates the vibration amplitude at various excitation amplitudes and frequencies.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Passive isolators effectively mitigate the vibrations in the isolation region, but these isolators do not function satisfactorily as the excitation frequency is varied. On the contrary, the semi-active isolators are adaptable and can be effective in stiffness and mass-controlled region vibrations. The ability of a semi-active isolator to mitigate vibration primarily depends on the functional element, which can change properties in response to external stimuli. Various semi-active isolator devices have been developed over the last decade using smart materials or mechanical means. Recent research has concentrated on the use of smart materials. A review of the literature revealed that semi-active isolator devices are typically made of shape memory alloys (SMAs), piezoelectric and magnetorheological elastomers. Among the list, MRE is the promising resilient element to realize the intelligent material-based semi-active vibration isolator. MRE is comprised of elastomer that contains matrix and micron-sized ferromagnetic filler particles. The stiffness and damping properties of the MRE are altered by the magnetic field [1], and it reverted to its initial state when the magnetic field is removed. This phenomenon is associated with the attempt by the ferromagnetic fillers to achieve the minimum energy state [2].
The performance of isolators is measured with respect to the ability to mitigate the vibration. Often transmissibility measurements are employed to assess the isolation effect induced by an isolator. The previous works carried out by our group [3] was reported that the transmissibility response was sensitive to the variation in the magnetic field. Additionally, the viscoelastic response of MRE resilient element was a function of frequency and amplitude of excitation. The change of natural frequency is associated with the change of dynamic properties of the material itself. In addition to the external magnetic field, the dynamic properties of MRE is strongly influenced by strain amplitude and excitation frequency [4,5,6,7].
Apart from material characterization, number of researchers focused on the development of isolators. Depending on the direction of the excitation force and magnetic field, these isolators operate in shear or squeeze mode. Weihua Li et al. [8] developed a magnetorheological elastomer isolator to isolate seat vibration. To reduce the vibration in the seat suspension system for frequency range of 1–20 Hz, the stiffness of the MRE isolator system was varied from 3000 N/m to 9000 N/m by varying current from 0 to 3 A. Fu et al. [9] used shear compression mode MRE isolator that suppresses the high-frequency and micro-amplitude vibration of a precision-fabrication platform. To reduce vibration, the natural frequency of the isolator was shifted from 45.82 to 82.55 Hz as the applied current was varied from 0 to 1.5 A. Tao et al. [10] developed a squeeze/elongation–shear mode isolator. To control the vibrations, input current to the isolator was varied from 0 to 2.5 A, resulting in an increase in stiffness and damping of approximately 66.57% and 45.55%, respectively. Yang et al. [11] developed a novel multi-layer MRE isolator with negative changing stiffness characteristics to reduce the horizontal vibration of the seat. The stiffness of the MRE isolator was reduced from 23,903 N/m at 0A to 11,442 N/m at 4A current input, correspondingly the natural frequency of the MRE isolator was decreases from 32 to 21 Hz. Opie and Yim [12] investigated a tunable stiffness MRE vibration isolator, and the experimental results showed that when compared to passive systems, the MRE isolator with SA controller system reduced the resonances and payload velocities by 16–30%. In a scaled building system, Behrooz et al. [13] designed and tested a new magnetorheological elastomer-based semi-active/passive variable stiffness and damping isolator (VSDI). The top floor vibration amplitudes in acceleration and displacement were effectively reduced by varying the current from 0 to 3 A which changes the natural frequency of the isolator from 41 to 51 Hz.
Following the design phase of the MRE isolator, a mathematical representation is created to aid in the implementation of control strategies. Developing a mathematical model for transmissibility of the MRE isolator is complex as its response varies with the magnetic field, the preload, strain amplitude, and the frequency of excitation [14]. There are few attempts made to develop a mathematical model for transmissibility of the MRE isolator for wide frequency range. Faramarz Gordaninejad et al. developed a viscoelastic model for variable stiffness and damping of isolator based on the Bouc–Wen hysteresis (VSDI). The model parameters are estimated from the force vs displacement curve for 2, 4, and 10% strain at 0.1 Hz excitation frequency in passive and active states (4 A). The model was used to estimate the transmissibility of the VSDI isolator for different currents, but it failed to estimate the transmissibility of the MRE isolator for different excitation amplitudes [15]. Other authors developed viscoelastic models such as hysteresis model [16], a standard linear solid model with Coulomb friction [17], Kelvin–Voigt Bouc–Wen model [18], strain-stiffening model [19], fractional viscoelastic models [20, 21] and LuGre friction model [22] for various MRE isolators. However, these models are based on the estimation of parameters of the model with respect to the steady-state force vs displacement responses at different amplitude of excitation and the current. These models fail to reproduce the dynamic response of the MRE isolator over wide frequency range [16, 17, 23,24,25,26,27,28]. Moreover, these models necessitating extensive experimentation to develop a mathematical model for predicting MRE isolator transmissibility. Also, this approach demands a greater amount of experimental data which is time-consuming. A mathematical model that responds to the change in amplitude of excitation at a different frequency, as well as the input current supplied, simplifies the process of effective implementation of control strategies for MRE isolator. This method is advantageous as it simplifies the process of identifying parameters for a given set of input operating conditions.
Success of MRE isolator necessitates an effective control strategy. The controller should activate the isolator for a specific frequency range of interest. When the frequency excitation reaches the isolation region, the controller should turn off and should function as a passive device. Furthermore, the controller should be adaptable to changes in amplitude and frequency of excitation. On–off or bang-bang controllers are the most commonly used controllers [29,30,31,32]. The on–off controller generates pulse-like control output based on the oscillating member position, causing jerks in the member. Another difference is that the on–off controller generates controller output for the entire frequency range, which is not an essential requirement in the case of an MRE isolator. The fuzzy controller is a popular alternative for the on–off controller [33,34,35,36,37]. In contrast to on–off controllers, which generate pulse signals, fuzzy controllers generate a continuous control signal for a given input, which eliminates jerks. However, the limitations of developed fuzzy controller are associated with the rules that were created in the data base. Because these rules are based on an on–off control, the control output is generated for full frequencies, which is not necessary in the case of an MRE isolator [17, 38]. Therefore, the present work focussed to identify the controller turn off frequency for the fuzzy controller through developing modal-based fuzzy controller.
To achieve the required goal, the current work is devoted to developing a mathematical model for the system via a simplified approach based on the state space approach and the controller stopping frequency. Transmissibility tests were conducted using a sine sweep input with a range of excitation amplitudes and frequencies, as well as a current input supply to the isolator. The state-space approach was used to develop the viscoelastic model for the MRE isolator when the input current was varied. The amplitude dependent properties of the viscoelastic modelling were estimated by relating the current input to the MRE isolator model to the excitation amplitude based on the controller stopping frequency. After developing the viscoelastic model, a model-based fuzzy controller was developed and its performance was evaluated both in simulation and in real time.
2 Semi-active MRE isolator construction detail and its performance analysis through transmissibility tests
2.1 MRE isolator design
The proposed MRE isolator is operating in shear mode, as it offers a larger enhancement due to lower values of initial stiffness. A schematic representation of the MRE isolator is presented in Fig. 1a. The details about the list of components, weight of each component, and their permeability is listed in Table 1. The isolator comprises main isolator body and the casing. The isolator body has the stationary electromagnet, a movable central core, two ring-shaped MRE elements and an aluminium piston attached to the movable central core. The electromagnet consists of a copper coil (20 AWG gauge wire with 980 number turns (Resistance is 6.02 Ω and inductance is 51.7 mH)) wound around the bobbin (inner diameter 20 mm, Outer diameter 100 mm and height 40 mm) [39]. The core material (fixed and moving steel core) is manufactured from low-carbon steel. For the proposed design, two ring-shaped MRE resilient elements are attached between the fixed and the moving core at the top and bottom of the isolator. A non-magnetic piston is attached to the moving steel core to accommodate the motion transmission from the shaker to the receiving end. To accommodate the vertical motion of the moving cylindrical core a gap of 10 mm is maintained between the MRE resilient element and the coil. The constituents and the synthesis process of the MRE are discussed in the Sect. 2.2. A stationary steel plate core and the central moving cylindrical steel core are employed to concentrate the flux lines through the MRE. The electromagnetic coil is designed such that the flux lines that pass through the core are perpendicular to the loading direction of MRE resilient element. Magnetic field simulations were performed in ANSYS Maxwell to analyse the field distribution in the MRE region (Fig. 1b). The effective magnetic permeability of MRE is calculated according to the Maxwell Garnett mixing rule [40], and it is expressed as,
where \({\mu }_{m}\) and \({\mu }_{p}\) are permeability of the matrix and particle and \(\phi\) is the volume fraction of the particle. The proposed design of electromagnet could generate a maximum magnetic flux density of around 0.37 T through the MRE resilient element corresponding to 3 A input current. The corresponding magnetic flux density values for 1 A and 2 A input current are 0.123 T and 0.246 T.

a Schematic representation of MRE isolator. b Magnetic field simulation of a cross section of the isolator using ANSYS Maxwell 15
The casing of the isolator is a cylindrical aluminium housing of dimension (inner diameter 120 mm and outer diameter 150 mm and height 170 mm). Two aluminium support rings (inner diameter 100 mm and outer diameter 120 mm and height 25 mm) are provided at the top and bottom to facilitate the movement of the central core. Two mounting plates one at the bottom and other at the top (plate diameter 180 mm and thickness of 10 mm) are provided to firmly position the MRE isolator body in the casing. The isolator assembly is rigidly fixed to the electrodynamic shaker using the bottom mounting plate.
2.2 MRE sample preparation
The field-induced enhancements are critical for MRE isolators to achieve isolation over a wide frequency range. Past studies have revealed that silicone rubber as a matrix for MRE isolator could achieve a high relative MR effect [41]. For the proposed design, two-ring shaped MRE resilient elements are prepared (inner diameter 40 mm, outer diameter 50 mm and thickness 5 mm). The MRE is synthesized with the silicone matrix and CIP fillers. The silicone matrix is procured from Aditya Silicone Rubber (MurtiSil, Rtv 1010), and the CIP fillers from BASF (CC grade, size 3–5 µm). As reported by the past studies, an optimum content of 72% by weight of CIP is chosen for the synthesis process [41]. Additionally, silicone oil is added as an additive for the ease of the synthesis process. These materials are mixed thoroughly with a weight ratio of 72% carbonyl iron, 16% silicone rubber, and 12% silicone oil, and the mixture is poured into the mould. The mould was kept in the vacuum chamber for about 20 min to remove the trapped air bubbles. After the vacuuming process, the MRE samples are cured for about 24 h at room temperature under constant pressure.
2.3 Experimental set-up for transmissibility test
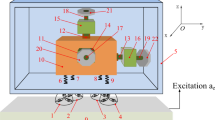
A displacement transmissibility test was used to determine the isolation performance of the MRE isolator. To determine the effect on isolation, natural frequency and controller stopping frequency, tests at various excitation amplitudes and input currents were conducted. The experimental set-up is depicted schematically in Fig. 2. The MRE isolator was attached to an inertial mass of 0.583 g, and the isolator was mounted on the electrodynamic shaker (APS 420 ELECTRO-SEIS). Two accelerometers (KISTLER type 8774A50) were used to measure the input and output accelerations; one was placed on the base plate and the other on top of the inertial mass. The MRE isolator was connected to a programmable power source, which supplies an input current up to 3 A to the coil. The initial testing of the MRE isolator in passive mode revealed that the natural frequency was around 30 Hz, and the corresponding value at 3 A input current is 50 Hz. Consequently, to assess the performance of the MRE isolator, a region close to the resonance region is considered. Thus, performance assessment of the MRE isolator is focused on the frequency region of 15–80 Hz. To study the effect of excitation amplitude the performance of the MRE isolator, the tests were conducted at different amplitude of excitation between 0.00125 and 0.00225 m. To have a better conrol over excitation amplitude, initial tests were conducted to calibrate the voltage output of the function generator in terms of amplitude of excitation, where 2 V represents 0.00125 m amplitude excitation and 4 V represents 0.00225 m amplitude excitation. A sine sweep frequency of 15–80 Hz was generated from the function generator to shaker, and the disturbances were transferred to the inertial mass via the MRE isolator. Following that, a series of tests were performed at an interval of 8 s. The current to the coil varied from 0 to 3 A with a 0.5 A step increment for each test. The accelerometer sensor responses at the base and inertial mass were collected (25,000 samples in 8 s) using a data acquisition device (NI 9234) and analysed with LabVIEW software.

Schematic representation of the test set-up for measuring the displacement transmissibility response of the isolator
2.4 Results and discussion
2.4.1 Magnetic field dependency of transmissibility
Figure 3 depicts the displacement transmissibility responses of the MRE isolator at different input currents under 0.0015 m amplitude of excitation. As evident from the graph, the natural frequency of the system increases with an increase in input current. At 0 A input current, the natural frequency of the system is 28 Hz, and it increased to 47.2 Hz for the input current of 3 A with a frequency shift of 19.2 Hz. The amount of shift in the natural frequency at different input currents is listed in Table 2. Among the tested conditions, the frequency shift is lower for the input current is 0.5 A, and it is maximum for 3 A current input. The shift in natural frequency of the system with the input current is associated with the enhancement in the stiffness under the influence of magnetic field. Additionally, the damping characteristics of the system also vary in response to the magnetic field. Using the following relations, the stiffness and damping characteristics of MRE resilient element are extracted from the transmissivity plots.

Displacement transmissibility of MRE isolator at different current inputs
The effective stiffness keff of the isolator expressed as
where m is inertial mass and fn is the natural frequency of the isolator.
The transmissibility \({T}_{r}\) of the isolator is
where \(\omega\) excitation frequency in rad/sec and \({\omega }_{n}\) natural frequency in rad/sec.
At natural frequency, where \(\frac{\omega }{{\omega }_{n}}=1\), then the damping ratio \(\xi\) of the isolator expressed as
where \({T}_{rn}\) represents transmissibility at the natural frequency and \(c\) is the damping coefficent.
The stiffness and the damping ratio values listed in Table 2 confirm that with the increase in input current the stiffness and the damping increase. At 3A input current, the enhancement in the stiffness is 184.76%. Compared to stiffness variation, the enhancement in the damping is not significant. A maximum enhancement of 19.96% in damping is noticed as the input current is increased to 3A.
2.4.2 Amplitude dependency of transmissibility
The property of MRE isolator is sensitive to the input amplitude of excitation. This typical behaviour is associated with Payne effect [42] exhibited by MRE under the dynamic loading, which is characterized by the decrease in stiffness with an increase in input strain under dynamic loading. Figure 4 shows a comparison between the displacement transmissibility response of MRE isolator registered at different amplitude of excitation corresponding to 0 A and 3 A input current. As evident from the graph, the natural frequency decreases with an increase in the amplitude of excitation. This response is consistent under both passive (0A) and active (3A) state. From the response plots, natural frequency, frequency shift, stiffness and damping values are extracted at different amplitude of excitation and input current and the corresponding values are listed in Table 3.

Transmissibility of the MRE with different excitation inputs without magnetic field 0 A and with magnetic field 3 A
As shown in Table 3, the natural frequency of the isolator system decreases with an increase in amplitude of excitation. Under passive state, for an input amplitude of 0.00125 m, the natural frequency of the system is 31 Hz, and with increasing the input current to 3A, the natural frequency is increased to 52.70 Hz, with a total frequency shift of 21.07 Hz. For the amplitude of excitation of 0.00225 m, the natural frequency of the system registered at 0 A is 27 Hz, and it increases to 43.09 Hz for an input current of 3 A. It is also observed that the frequency shift is a function of input amplitude. At larger excitation amplitude, the frequency shift with respect to the active state of MRE decreases.
With an increase in amplitude of excitation, the stiffness and the damping ratio of the isolator system are decreased. Among the tested input excitation amplitude levels, the stiffness and the damping ratio values are maximum for an input amplitude of 0.00125 m. At 0 A input current, the stiffness of the isolator is reduced from 22,039.5 N/m to 16,721.04 N/m for varying the amplitude of excitation from 0.00125 m to 0.00225 m. Corresponding values for the input current of 3 A current decreases from 63,936.1 N/m to 42,602.12 N/m. This implies that the stiffness reduction with increasing strain is more pronounced in the presence of a magnetic field [43]. With increased excitation amplitude, the overall relative change in stiffness of the MRE isolator decreases from 190.08 to 154.78%. The damping ratio of MRE isolator is decreased with an increase in amplitude of excitation. At 0 A input current, the damping ratio is decreased from 0.2886 to 0.0999 as the input amplitude of excitation is varied from 0.00125 to 0.00165 m [44]. At 3 A input current, the corresponding changes in damping ratio is from 0.2224 to 0.1668 [44]. The damping in the MRE isolator is due to frictional sliding at the interfaces between the free rubber and the particles [45]. At low strain levels, the particle can easily slide over the rubber, causing friction and thus resulting in higher damping ratio. At higher strain levels, the rubber locks the particle and partially allows the particle to slide over the rubber, resulting in relatively lower damping [46]. The relative increase in damping ratio with increasing excitation amplitude is from -22.91% to 67%, which indicates that at lower strain, dipole interaction between the particles is stronger, reducing the friction between the particle and rubber [46]. However, at higher strain levels, dipole interactions between the particles are not pronounced, which increases the friction between the rubber and particle [46].
3 Viscoelastic modelling of the MRE isolator
3.1 State-space equation of MRE isolator
The performance analysis of MRE isolator confirms that its repose varies with the frequency, magnetic field and the input amplitude. To implement semi-active control strategies, these responses need to be represented mathematically. The material behaviour of MRE is viscoelastic in nature [47], and it can be mathematically represented by the viscoelastic constitutive relations. In addition, MRE also exhibits hysteretic behaviour as the input strain is increased. Thus, the modelling process of MRE is complex as its it should portray the response at different loading conditions [15].
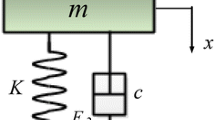
A single-degree-of-freedom system (SDOF) representation of the MRE isolator model is shown in Fig. 5. The model comprises Zener [48] and Bouc–Wen [49] combined together, representing the viscoelastic and hysteresis behaviour of the MRE isolator. The governing equation of the MRE isolator model with the Zener and Bouc–Wen elements is,
where \(z\) is hysteretic force.\(\Delta {k}_{1}\),\(\Delta {k}_{2}\) and \(\Delta c\) parameters are the change of properties under the influence of the magnetic field.
where \(\alpha\), \(\beta\) and \(\gamma\) are non-dimensional parameters responsible for the shape and size of the hysteretic loops.

Viscoelastic model of the MRE isolator
The state-space equation for the system is given as
where \(x\left(t\right)\),\(y\left(t\right)\) and \(w(t)\) are the response, intermitted, and input excitation in time-domain signals. The MRE isolator viscoelastic model parameters are sensitive to the magnetic field, excitation amplitude and frequency. To incorporate the control strategies, identification of these parameters is crucial. A procedure to identify the parameters are discussed in the following section.
3.2 Viscoelastic model parameter identification procedure
MRE isolator properties are strongly nonlinear functions of magnetic flux density, excitation frequency, and displacement amplitude [45]. Considering all the parameters and developing a mathematical model for MRE isolator is a quite difficult task, since it involves the nonlinearity. To simplify this process, in the current work the nonlinear responses of the MRE isolator is converted to linear response using the system identification toolkit in the MATLAB, and then the MRE isolator is represented as a second order linear state-space (LSS) equation [50]. The linear state-space matrix identified from system identification process is nonparametric in nature and its parametric form of viscoelastic model are obtained by using optimization toolkit in the MATLAB [51]. Figure 6 depicts the process of determining the parameters of the viscoelastic state-space model. The following paragraph provides a detailed description of each individual process.

Steps for identifying viscoelastic model parameters
Step 1: In this stage, a linear second-order state-space equation is extracted using the MATLAB system identification toolkit for the measured input and output sine sweep signal. Continuous time-domain second-representation of the order state-space model is,
where s(t) is the state vector, u(t) is the input vector, \({x}_{NPSS}(t)\) is displacement response of the nonparametric the state-space equation. Matrix A is the state matrix, B is the input matrix, C is the output matrix, and D is the feedthrough matrix.
Step 2: The state-space equation obtained in step 1 is in nonparametric form, and it does not have any physical meaning. The model is represented in parametric form by incorporating in Zener-based state-space equation. The parameters of this model are identified using the Simulink parameter optimization toolkit by minimizing the sum squared error between Zener parametric state-space response (\({x}_{ZPSS}\left(t\right)\)) and NPSS (nonparametric state-space model) response (\({x}_{NPSS}\)). The parametric form of the model with Zener-based viscoelastic state-space model response is expressed as,
The objective function to find the parameters of the Zener-based viscoelastic model is [52]
Step 3: The Bouc–Wen is a hysteresis element considered for modelling the hysteresis behaviour. Its parameters are identified using the Simulink parameter optimization toolkit by minimizing the sum squared error between NPSS response (\({x}_{NPSS}(t)\)) and the viscoelastic state-space model (VSS) response (\({x}_{VSS}(t)\)). The response of the viscoelastic state-space model is expressed as
The objective function to find the Bouc–Wen parameter is
3.3 Parameter estimation and generalizing the variation with respect to the input current
Table 4 shows the nonparametric linear second order state-space matrix estimated using the system identification toolkit (MATLAB) for various input currents. The state-space matrix is linear, and its linearity component is assessed in terms of best fit (Estimated from system identification toolkit from MATLAB), which represents the percentage of fit with respect to experimental data. For an input current of 0 A, the linear state-space matrix provides the best fit of about 81.84%. This indicates that the MRE isolator has a nonlinearity of approximately around 18.16%. The nonlinearity in the MRE isolator decreases from 18.16 to 6.8% as the current to the isolator increases from 0 to 3 A.
The parameters of the Zener viscoelastic model for different current input to MRE isolator estimated from optimization process are listed in Table 5. The hysteresis behaviour accounts for the nonlinearity present in the transmissibility response. The source of nonlinearity is either the magnetic field or the input strain [53]. In the present study, the hysteresis element Bouc–Wen parameters were estimated only for the response corresponding to 0 A input current and 0.0015 m amplitude of excitation. The corresponding Bouc–Wen parameters α, β, γ and n estimated from optimization process are − 2172, 30, 30 and 1, respectively. The Bouc–Wen parameters for other input current are considered to be the same as that of 0 A input current. By considering that the maximum error achieved by the viscoelastic model for other current input in estimating the experimental natural frequency and transmissibility at natural frequency is about 1.6 and 3.8%, hence, Bouc–Wen parameters for other current input considering 0 A current input are justified.
A comparison between the experimental and the predicted transmissibility response from the viscoelastic model with optimized parameters at different current inputs is presented in Fig. 7. It can be visualized that the viscoelastic model accurately predicts the natural frequency of the MRE isolator with the least error of 1.6% registered at 2 A input current. However, the magnitude of transmissibility predicted by the model at the natural frequency deviates with respect to the experimental data, with a maximum error of 3.8% corresponding to the 2 A input current. The corresponding error for an input current of 1A is 1.53%, and it is negligible for 0 A and 3 A input currents. At 0A input current, the predicted response by the optimized parameters of the viscoelastic model perfectly simulates transmissibility response, but for other current inputs, the model estimates natural frequency for transmissibility rather than amplitude, especially for 1 and 2 A current input. This disparity is primarily due to the hysteresis behaviour accounted for in the model.

Comparison between experimental transmissibility and the viscoelastic model optimized parameter transmissibility for current input 0, 1 and 3 A
To implementing the control strategies in the MRE isolator, the viscoelastic model parameter under variation of current input must be generalized. A polynomial function is chosen to generalize the variation of the parameters with respect to the input current i. The mathematical expression for generalizing variation in the Zener model parameters is
The mathematical expression to generalize the variation in parameters of the Zener model parameters with the applied current was obtained with respect to the input currents of 0, 1, 2 and 3 A. However, for developing model-based control, it is important to assess the ability of the generalized expression in predicting the transmissibility response of MRE isolator. The ability of the proposed model in predicting the transmissibility response is assessed in terms of the responses estimated at 0.5, 1.5 and 2.5 A. The parameters values corresponding to this input current are estimated using the expressions 16, 17 and 18 and substituted in Eq. 8 to get the model-predicted transmissibility response.
A comparison between the experimentally determined transmissibility response and the model-predicted response at 0.5 A, 1.5 A and 2.5 is presented in Fig. 8.

A comparison between the experimental and generalized mathematical expression predicted transmissibility response for current input 0.5, 1.5 and 2.5 A
As visualized in Fig. 8, the transmissibility responses predicted by the model effectively portray the experimentally determined responses at 0.5, 1 and 2.5 A. The model predicts the natural frequency of isolator with an error of less than 1%. The model, however, indicates that the error in estimating the amplitude of the transmissibility is approximately 4.6% for 2.5 A, 3.2% for 1.5 A and 1.7% for 0.5 A. It is concluded that the developed viscoelastic model efficiently estimates the natural frequency of the MRE isolator, but less efficiently estimates the amplitude of transmissible few currents.
The ability of the model in portraying the experimentally determined is expressed in terms of fitness value. The fitness values are estimated from Eq. 19 which is given below.
where \({T}_{P}\) is predicted transmissibility and \({T}_{E}\) experimental transmissibility of the MRE isolator.
Fitness value of the viscoelastic model for different current is listed in Table 6. The fitness value of the model-predicted response is least about 89.47 for 2.5 A and highest about 96.66 for 1A and 0.5 A, implying that model that moderately fits the experiment transmissibility can be used for control implementation.
3.4 The relationship between the excitation amplitude and current supplied to the isolator
The transmissibility response differs with the change in input amplitude of excitation under passive as well as active states. To develop an effective control strategy, these responses need to be represented in the form of mathematical expressions where the parameters of the viscoelastic models are identified for each amplitude of excitation under passive and active states. This approach is time-consuming and requires a huge amount of experimental data. To simplify this process, a novel method based on the controller stopping frequency is developed to incorporate the amplitude-dependent attributes to the MRE isolator model. The controller stopping frequency concept is formulated based on the operation of an efficient controller. This concept is illustrated by the frequency response curves shown in Fig. 9. The response of MRE isolator under passive state (0A) is represented by a frequency response curve with lower natural frequency, and the active state (3A) is characterized by a response curve with higher natural frequency. To restrict the isolator system from reaching the resonance region corresponding to the passive state, the controller should be operated under active state so that it traces the response curve corresponding to the 3A input current. The controller should turn off the supply to the isolator when it reaches the frequency corresponding to the intersection of the active and passive state, representing the controller stopping frequency. (Table 5) In addition, it is very important that the control signal should be off at the stopping frequency so that the isolator traces the response curve corresponding to the passive state; otherwise, the isolator system passes through the resonance region of the active state and violates the law of the efficient controller.

Controller stopping frequency
For developing a controller based on the controller stopping frequency, it is important to identify different amplitudes of excitation. The controller stopping frequencies estimated from the displacement transmissibility test corresponding to different amplitudes of excitation (Fig. 4) are listed in Table 7. As evident from the experimental response (Fig. 4) and model-predicted response (Fig. 7) plots, the difference exists with respect to the controller stopping frequency. For example, the controller stopping frequency for the transmissibility response of MRE isolator model corresponding to 0.00150 m amplitude of excitation is 34.8 Hz and the corresponding value estimated from experimental is 35.16 Hz. This difference needs to be accounted; otherwise, it deteriorates the performance of the controller. To match the experimentally determined stopping frequency, the current input I to the model needs to be estimated. For the 0.00150 m excitation amplitude and 3A input current, the model-predicted controller stopping frequency is lower than the experimentally determined value. This implies that the input current needs to be increased from 3 A since the controller stopping frequency is less than the experimental value. However, for 0.00225 m amplitude of excitation, the current need to be decreased from 3 A as the controller stopping frequency of the model is more than the experimental value. To accurately predict the controller stopping frequency, the response of MRE isolator model for a specific amplitude of excitation under passive state is considered as a reference. For the developed isolator, the response curve corresponding to the amplitude of 0.0015 m under passive state is chosen as the references curve. With respect to this curve, the current input to the isolator is either decreased or increased from 3 A to obtain the accurate controller stopping frequency for the required input current and the excitation amplitude.
To incorporate semi-active control strategies, the values of viscoelastic model parameters must be estimated with respect to the amplitude of excitation as well. A polynomial function is chosen for this purpose in order to establish a generalized equation that describes the relationship between the current input to the MRE isolator model and the amplitude of excitation. The polynomial equation current I expressed as a function of excitation amplitude A is written as
where A denotes the amplitude of excitation.
For a given amplitude of excitation, the current input I to the MRE isolator model is estimated using Eq. 20. The parameters of the model (Eqs. 16–18) are estimated for this current, and the corresponding values are listed in Table 8. Using these parameters, the transmissibility response is estimated according to Eq. 8, and the corresponding plots for amplitudes of excitation ranging from 0.00125 to 0.00225 m are shown in Fig. 10. As discussed above, the controller stopping frequency is the intersection of the passive response of the MRE isolator model with its active response. This is the key parameter for developing the isolator model and model-based control technique. The experimental transmissibility test confirms that the control stopping frequency was decreased with the amplitude of excitation. The similar behaviour is predicted by the isolator model. At 0.0125 m amplitude, the stopping frequency of isolator corresponding to the input current of 3 A is 39.51 Hz. The same value is estimated from using the equation. This confirms that controller stopping frequency predicted by the isolator model gives a similar feature corresponding to the experimental transmissibility under different amplitudes of excitation. The developed model could effectively portray the amplitude and the field sensitive responses, and based on this model, a model-based fuzzy controller algorithm is developed.

Simulated amplitude dependency of the MRE isolator
4 Control algorithm
Developing an appropriate control strategy is very critical for using MRE isolator real-life applications. Past researchers have reported on the MRE isolator based on on–off [54] and fuzzy controller [33]. These controllers are modal free and easy to control. However, the above stated controller has inherent drawback in that they produce control output for all frequencies, which is not essential. To address these shortcomings, the current research is focused on the development of a model-based fuzzy controller for vibration isolation. The developed viscoelastic state-space model was used to control the fuzzy controller output so that its controller stopping frequency is not exceeding. This is accomplished by comparing the passive viscoelastic state-space model response of the MRE isolator \({\ddot{x}}_{{I}_{0}}\), with the response from active viscoelastic state-space model \({\ddot{x}}_{I}\). The condition for enabling or disabling the fuzzy controller is listed below.
where \(0\) and \(1\) denote the fuzzy controller, which receives the off and on command, respectively.
Figure 11 depicts the block diagram for representing the fuzzy controller implementation process. A fuzzy controller generates the required output in three steps: fuzzification, fuzzy inference and defuzzification. The following section illustrates a detailed description of each process.

Block diagram of the fuzzy controller
4.1 Fuzzification
In this phase, the displacement response (x(t)), relative displacement response (x(t)-w(t)) and controller output u(t) signals scaled for unity for better differentiation. The fuzzy controller initially converts both the continuous numerical signal into linguistic variables. The linguistic variables named as positive big (PB), positive medium (PM), positive small (PS), zero (ZO), negative small (NS), negative medium (NM) and negative big (NB). This process of conversion is called fuzzification. The range of each linguistic variable for input and output variables is depicted in Fig. 12, and for each linguistic variable, a specific membership function (triangular membership or sigmoidal membership function) is assigned. The detailed mathematical information about triangular and sigmoidal membership functions is provided in the subsection of this section. The designation of membership functions of displacement and relative displacement is \(\mu_{x\left( t \right)} \left( d \right)\) and \(\mu_{{\left( {x\left( t \right) - w\left( t \right)} \right)}} \left( r \right)\) for the fuzzy set of \(x\left( t \right)\) and (x(t)-w(t)), and the output membership is \(\mu_{u\left( t \right)} \left( i \right)\) for the fuzzy set u(t).

Triangular and sigmoidal membership function of x(t), (x(t)-w(t)) and u(t)
4.1.1 Triangular membership
The triangular membership is defined for NM, NS, ZO, PS and PM of the input and output signals. If a, b and c represent the lower, centre, upper boundary of the input and output signal and the membership function [55]
where \(d\), \(r\) and \(i\) are the universe of discourse of the triangular membership function for the \(x\left( t \right), \left( {x\left( t \right) - w\left( t \right)} \right) and u\left( t \right)\) fuzzy set.
4.1.2 Sigmoidal membership function
The sigmoidal membership function is defined for input and output signal linguistic variables NB and PB. The selected sigmoidal membership will improve the control processing and stability of the controller. This member function has an exponential function that depends on two parameters. The sigmoidal membership function mathematically is defined as [55]
where \(d\), \(r\) and \(i\) are the universe of discourse of the sigmoidal membership function for the \(x\left( t \right), \left( {x\left( t \right) - w\left( t \right)} \right) and u\left( t \right)\) fuzzy set.
4.1.3 The fuzzy inference
After fuzzification, the next phase is the fuzzy inference, where in the present study Mamdani fuzzy inference [56] method is considered. This inference contains 49 rules (Table 9) on linguistic variables based on the on–off control algorithm. Based on Mamdani fuzzy inference, fuzzy operation OR (OR = max) in implemented on two fuzzy input membership functions. Then, the maximum value of the membership function \(\mu_{u\left( t \right)} \left( d \right)\) and \(\mu_{{\left( {x\left( t \right) - w\left( t \right)} \right)}} \left( r \right)\)
Apply implication method (min)
Apply aggregation method for 49 rules (max)
4.1.4 Defuzzification
The last phase of the operation is performed to produce the required current for controlling the system stiffness. This process is called defuzzification. In this process, the centre-of-gravity method is adapted to compute the output driving current I. The calculated output of the fuzzy is scaled to the required value and supplied to the MRE isolator.
The mathematical expression to represent the fuzzy output calculated from the centre of gravity (COG) / centroid of area (COA) method is [57],
where n represents the number of elements of membership function \(\mu_{{u\left( t \right){\text{sum}}}}\).
4.2 Block diagram representation of the model-based fuzzy controller
The block diagram depicts the process of generating the required current input to the MRE isolator (Fig. 13). The actual MRE isolator and two state-space models 0 A & I A are fed with the excitation signal input w(t). The state-space model response corresponding to 0 A current input is\({\ddot{x}}_{{I}_{0}}\). The current I in the state-space model is estimated using Eq. 20 based on the given excitation signal and generate the response signal \({\ddot{x}}_{I}\). The MRE isolator generates displacement response and relative response signals ((x(t) & (x(t)-w(t)) from the excitation input. The fuzzy controller receives the x(t) and x(t)-w(t) responses and generates a unit control output signal u(t). This signal is multiplied by current input I to obtain the required value for scaling the control output. Based on the condition block (Eq. 21), the fuzzy controller output is sent to the MRE isolator.

Block diagram of the control scheme
4.3 Simulations of control performance under multi-frequency excitation
A multi-frequency of excitation is used to evaluate the performance of the MRE isolator with modal-based fuzzy controller. The MRE isolator system was excited at frequencies ranging from 15 to 80 Hz (Fig. 14a). Based on the excitation amplitude, the controller generates an output, and it is fed into the MRE isolator. In response to input signal from the controller, MRE isolator generates an output. The output response of the isolator with and without control is shown in Fig. 14b. The isolator is active for 1.8 s (Fig. 14c), and after that, it is turned off. Without control signal, the isolator function as a passive device, which implies that after 1.8 s there is no difference between the response signal obtained from the MRE isolator with and without control. However, as evident from Fig. 14b, the passive response of the MRE isolator merges with the active response of MRE isolator after 1.8 s which confirms that MRE isolator system reaches the isolation region. This aspect can be visualized from the transmissibility plot of the controller shown in Fig. 14(d). According to this plot, MRE isolator with control stops at 35 Hz and works as the passive MRE isolator beyond 35 Hz frequency. Overall, when compared to the passive state of the MRE isolator, the model-based fuzzy controller effectively isolates vibrations by 52.94% and generates control output up to the required frequency before stopping automatically.

a Excitation input; b isolator response signal with and without control; c controllers output signal; d transmissibility plots
5 Real-time implementation of the controller
5.1 Experimental set-up for real-time implementation
The performance of the MRE isolator was examined in real time by implementing modal-based controller. The experimental set-up for measuring the performance of the MRE isolator is shown in Fig. 15. The MRE isolator was mounted on the shaker table (Model: APS 420, APS DYNAMICS, INC). The real-time implementation control algorithm was incorporated using an NI cRIO (CompactRIO Controller)-9024 embedded real-time controller. The function generator generates a sine sweep excitation signal with 2.5 V excitation amplitude for frequencies ranging from 15 to 50 Hz. These signals were generated for a duration of 10 s, and its execution was controlled by using NI 9264 voltage output module. The generated sine sweep signal was fed into the amplifier and the amplified signal is received by the shaker. Two accelerometers (Model: 8774A50, Kistler) were used, one mounted on the table and the other on the inertial mass to measure the input and output response, respectively. The data from the sensors were collected using the NI 9234 DAQ module acquired through LabVIEW.

Experimental set-up for controlling vibration in the MRE isolator
5.2 Real-time assessment of the performance of MRE isolator with modal-based fuzzy controller under multi-frequency excitation
The response of MRE isolator without a controller for a given amplitude of excitation input is shown in Fig. 16(a). Under passive state, the response of the MRE isolator generates a maximum acceleration of around 27.39 m/s2. The controller calculates and produces controller output based on the given excitation amplitude, which is shown in Fig. 16(b). The MRE isolator receives the generated controller signal and isolates the vibrations at the inertial mass about 55.55% at natural frequency. By analysing the response of the MRE isolator, one can conclude that the controller effectively reduces vibration in the inertial mass up to 35 Hz, as evidenced by the control output signal, which stops at 5.5 s. This confirms that the model-based fuzzy controller is an effective control strategy and can be easily incorporated into MRE devices. This controller is adaptable and can be used to achieve wide frequency range isolation. However, it is also required to assess the influence larger strain on the controller stopping frequency needed to be estimated for developing the viscoelastic model. The major drawback of the MRE isolator is the time delay, which needs to be addressed by considering the design modification of the coil without compromising the magnetic field.

a Controlled and uncontrolled acceleration response; b controller output
6 Conclusions
This study focuses on developing a mathematical model for MRE isolator by incorporating current input and amplitude of excitation-dependant properties to attain wide frequency range isolation. Based on this model, a model-based fuzzy controller was developed for the MRE isolator and its performance was evaluated from control simulation and real time tests. The MRE isolator is sensitive to input current and variations in excitation amplitude. The isolator can effectively mitigate the vibrations by 58% with respect to the passive state, when it is supplied by an input current of 3 A. The natural frequency of the isolator system decreases with an increase in amplitude of excitation. In addition, this overall decrease is a function of the initial excitation amplitude. The dynamic range of isolator depends on the input amplitude. At an excitation amplitude of 0.00125 m amplitude, the maximum change in the natural frequency of the system is 21.07 Hz and at 0.0025 m amplitude, the shift in natural frequency of the dynamic isolator system is lesser than 16.09 Hz.
For implementing the control, it is very important that the response should be represented by a mathematical expression. A viscoelastic modelling approach is very effective in portraying the response of the isolator system. The isolator models based on the viscoelastic models often fail to predict the nonlinearity due to the amplitude of excitation and the magnetic fields which are contributing to the overall response. A Bouc–Wen element coupled with the viscoelastic model is more effective as the model can portray the amplitude dependent viscoelastic responses. This modelling technique is an equivalent parametric approach, which requires finding the parameters with respect to the experimental data. The parameter estimation with respect to the steady state is a proven method, but it requires a larger amount of experimental data. A method based on identifying the parameters with respect to the sweep test is more advantageous. This approach is beneficial as it avoids the process of finding the parameters corresponding to the specific set with respect to the steady-state excitation frequencies.
The Bouc–Wen element can predict the hysteresis behaviour in the model, but identifying the unique parameters corresponding to the specific set of input conditions requires a larger amount of data, which is time-consuming. This process can be simplified with respect to the viscoelastic models developed based on the controller stopping frequency. The concept of controller stopping frequency simplifies the overall development phase of the isolator models. This approach demands an accurate prediction of the stopping frequency by the model with respect to the experimentally determined values. Moreover, it is very important to choose the reference curve, and it should be the exact representation of the experimental response. The critical phase of this process is a generalization of the input current to accurately predict the stopping frequency, which needs to be accurately modelled, or else the system may reach resonance, and the control law will be violated. In the case of the MRE isolator, the previously developed modal free fuzzy controller generates the control output for all frequencies, which is not required. So, in simulation, the proposed model fuzzy based controller knows when to stop the controller output and is effective, reducing vibration by 52.9%. Under real time tests it could effectively mitigate the vibration by 55.5%. For implementing in real time, the performance of the isolator needs to be evaluated at larger strain, and the corresponding correction factor needs to be accommodated in the developed isolator model.
7 Future research and scope
-
The effect of larger amplitude of excitation on the controller stopping frequency needs to be estimated for developing the viscoelastic model.
-
Considering time delay in the system and developing the model-based controller.
-
Model-based control development for other excitation like bump and random needs to tested.
-
Creating a design that includes permanent magnets in the coil circuit to reduce the amount of current supplied and, as a result, the temperature generation in the coil.
References
Lokander M (2002) Performance of isotropic magnetorheological rubber materials. Annu Trans Nord Rheol Soc. https://doi.org/10.1016/S0142-9418(02)00043-0
Davis LC (1999) Model of magnetorheological elastomers. J Appl Phys 85:3348–3351. https://doi.org/10.1063/1.369682
Poojary UR, Hegde S, Gangadharan KV (2017) Dynamic deformation–dependent magnetic field–induced force transmissibility characteristics of magnetorheological elastomer. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X16672730
Poojary UR, Gangadharan KV (2016) Experimental investigation on the effect of magnetic field on strain dependent dynamic stiffness of magnetorheological elastomer. Rheol Acta. https://doi.org/10.1007/s00397-016-0975-y
Yu Y, Li Y, Li J (2015) Parameter identification of a novel strain stiffening model for magnetorheological elastomer base isolator utilizing enhanced particle swarm optimization. J Intell Mater Syst Struct 26:2446–2462. https://doi.org/10.1177/1045389X14556166
Lectez AS, Verron E (2016) Influence of large strain preloads on the viscoelastic response of rubber-like materials under small oscillations. Int J Non Linear Mech 81:1–7. https://doi.org/10.1016/J.IJNONLINMEC.2015.12.003
Ni ZC, Gong XL, Li JF, Chen L (2009) Study on a dynamic stiffness-tuning absorber with squeeze-strain enhanced magnetorheological elastomer. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X09104790
Li W, Zhang X, Du H (2012) Development and simulation evaluation of a magnetorheological elastomer isolator for seat vibration control. J Intell Mater Syst Struct 23:1041–1048. https://doi.org/10.1177/1045389X11435431
Fu J, Li P, Liao G et al (2017) Development and dynamic characterization of a mixed mode magnetorheological elastomer isolator. IEEE Trans Magn. https://doi.org/10.1109/TMAG.2016.2606406
Tao Y, Rui X, Yang F et al (2018) Design and experimental research of a magnetorheological elastomer isolator working in squeeze/elongation–shear mode. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X17740436
Yang CY, Fu J, Yu M et al (2015) A new magnetorheological elastomer isolator in shear-compression mixed mode. J Intell Mater Syst Struct 26:1290–1300. https://doi.org/10.1177/1045389X14541492
Opie S, Yim W (2011) Design and control of a real-time variable modulus vibration isolator. J Intell Mater Syst Struct 22:113–125. https://doi.org/10.1177/1045389X10389204
Behrooz M, Wang X (2012) Gordaninejad F (2012) Control of structures featuring a new MRE isolator system. Act Passiv Smart Struct Integr Syst 8341:83411I. https://doi.org/10.1117/12.915828
Kulik VM, Semenov BN, Boiko AV et al (2009) Measurement of dynamic properties of viscoelastic materials. Exp Mech 49:417–425. https://doi.org/10.1007/s11340-008-9165-x
Behrooz M, Wang X, Gordaninejad F (2014) Modeling of a new semi-active/passive magnetorheological elastomer isolator. Smart Mater Struct. https://doi.org/10.1088/0964-1726/23/4/045013
Yu Y, Li Y, Li J, Gu X (2016) A hysteresis model for dynamic behaviour of magnetorheological elastomer base isolator. Smart Mater Struct. https://doi.org/10.1088/0964-1726/25/5/055029
Nguyen XB, Komatsuzaki T, Iwata Y, Asanuma H (2018) Modeling and semi-active fuzzy control of magnetorheological elastomer-based isolator for seismic response reduction. Mech Syst Signal Process. https://doi.org/10.1016/j.ymssp.2017.08.040
Yu Y, Li Y, Li J (2014) A new hysteretic model for magnetorheological elastomer base isolator and parameter identification based on modified artificial fish swarm algorithm. In: 31st International symposium on automation and robotics in construction and mining, ISARC 2014-proceedings
Li Y, Li J (2017) On rate-dependent mechanical model for adaptive magnetorheological elastomer base isolator. Smart Mater Struct. https://doi.org/10.1088/1361-665X/aa5f95
Poojary UR, Gangadharan KV (2018) Integer and fractional order-based viscoelastic constitutive modeling to predict the frequency and magnetic field-induced properties of magnetorheological elastomer. J Vib Acoust Trans ASME doi 10(1115/1):4039242
Kiran K, Poojary UR, Gangadharan KV (2022) Fractional order viscoelastic modeling of the magnetic field dependent transmissibility response of MRE isolator. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X221087172
Yu Y, Li Y, Li J (2015) Parameter identification and sensitivity analysis of an improved LuGre friction model for magnetorheological elastomer base isolator. Meccanica
Yang J, Du H, Li W et al (2013) Experimental study and modeling of a novel magnetorheological elastomer isolator. Smart Mater Struct. https://doi.org/10.1088/0964-1726/22/11/117001
Yu Y, Li Y, Li J (2015) Nonparametric modeling of magnetorheological elastomer base isolator based on artificial neural network optimized by ant colony algorithm. J Intell Mater Syst Struct 26(14):1789–1798
Yu Y, Li Y, Li J et al (2018) Nonlinear characterization of the mre isolator using binary-coded discrete CSO and ELM. Int J Struct Stab Dyn. https://doi.org/10.1142/S0219455418400072
Yu Y, Hoshyar AN, Li H et al (2021) Nonlinear characterization of magnetorheological elastomer-based smart device for structural seismic mitigation. Int J Smart Nano Mater 12:390–428. https://doi.org/10.1080/19475411.2021.1981477
A new hybrid model for MR elastomer device and parameter identification based on improved FOA. http://121.78.145.37/content/?page=article&journal=sss&volume=28&num=5&ordernum=3#. Accessed 29 Mar 2022
Fan J, Yao J, Yu Y, Li Y (2022) A macroscopic viscoelastic model of magnetorheological elastomer with different initial particle chain orientation angles based on fractional viscoelasticity. Smart Mater Struct 31:025025. https://doi.org/10.1088/1361-665X/AC4575
Ni ZC, Gong XL, Li JF, Chen L (2009) Study on a dynamic stiffness-tuning absorber with squeeze-strain enhanced magnetorheological elastomer. J Intell Mater Syst Struct 20:1195–1202. https://doi.org/10.1177/1045389X09104790
Xu ZD, Suo S, Lu Y (2016) Vibration control of platform structures with magnetorheological elastomer isolators based on an improved SAVS law. Smart Mater Struct. https://doi.org/10.1088/0964-1726/25/6/065002
Zheng HM, Dong DD, Zhu LH (2014) Tunable stiffness and damping vibration control strategy based on magnetorheological elastomer isolator. Appl Mech Mater 543–547:1461–1466. https://doi.org/10.4028/www.scientific.net/AMM.543-547.1461
Liao GJ, Gong XL, Xuan SH et al (2012) Development of a real-time tunable stiffness and damping vibration isolator based on magnetorheological elastomer. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X11429853
Nguyen XB, Komatsuzaki T, Iwata Y, Asanuma H (2017) Fuzzy Semiactive vibration control of structures using magnetorheological elastomer. Shock Vib. https://doi.org/10.1155/2017/3651057
Fu J, Li P, Wang Y, Liao G, Yu M (2016) Model-free fuzzy control of a magnetorheological elastomer vibration isolation system: analysis and experimental evaluation. Smart Mater Struct 25(3):035030
Fu J, Bai J, Lai J et al (2019) Adaptive fuzzy control of a magnetorheological elastomer vibration isolation system with time-varying sinusoidal excitations. J Sound Vib. https://doi.org/10.1016/j.jsv.2019.05.046
Fu J, Li P, Liao G et al (2018) Active/semi-active hybrid isolation system with fuzzy switching controller. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X17733054
Zou A, Xu L, Zhu M, et al (2018) Fuzzy control study on a transformer vibration isolation system. In: Proceedings of the 30th chinese control and decision conference, CCDC
Nguyen XB, Komatsuzaki T, Iwata Y, Asanuma H (2017) Fuzzy Semiactive vibration control of structures using magnetorheological elastomer. Shock Vib. https://doi.org/10.1155/2017/3651057
Guðmundsson I (2011) A feasibility study of magnetorheological elastomers for a potential application in prosthetic devices. 563
Li WH, Zhang XZ (2010) A study of the magnetorheological effect of bimodal particle based magnetorheological elastomers. Smart Mater Struct. https://doi.org/10.1088/0964-1726/19/3/035002
Khairi MHA, Fatah AYA, Mazlan SA et al (2019) Enhancement of particle alignment using silicone oil plasticizer and its effects on the field-dependent properties of magnetorheological elastomers. Int J Mol Sci. https://doi.org/10.3390/ijms20174085
Sorokin VV, Ecker E, Stepanov GV et al (2014) Experimental study of the magnetic field enhanced Payne effect in magnetorheological elastomers. Soft Matter 10:8765–8776. https://doi.org/10.1039/c4sm01738b
Sorokin VV, Ecker E, Stepanov GV et al (2014) Experimental study of the magnetic field enhanced Payne effect in magnetorheological elastomers. Soft Matter. https://doi.org/10.1039/c4sm01738b
Yarra S, Gordaninejad F, Behrooz M, Pekcan G (2019) Performance of natural rubber and silicone-based magnetorheological elastomers under large-strain combined axial and shear loading. J Intell Mater Syst Struct. https://doi.org/10.1177/1045389X18808393
Fan Y, Gong X, Xuan S et al (2011) Interfacial friction damping properties in magnetorheological elastomers. Smart Mater Struct. https://doi.org/10.1088/0964-1726/20/3/035007
Liu C, Hemmatian M, Sedaghati R, Wen G (2020) Development and control of magnetorheological elastomer-based semi-active seat suspension isolator using adaptive neural network. Front Mater. https://doi.org/10.3389/fmats.2020.00171
Kallio M (2005) The elastic and damping properties of magnetorheological elastomers. 3–146
Nguyen XB, Komatsuzaki T, Iwata Y, Asanuma H (2018) Modeling and semi-active fuzzy control of magnetorheological elastomer-based isolator for seismic response reduction. Mech Syst Signal Process 101:449–466. https://doi.org/10.1016/j.ymssp.2017.08.040
Yu Y, Li Y, Li J (2015) Forecasting hysteresis behaviours of magnetorheological elastomer base isolator utilizing a hybrid model based on support vector regression and improved particle swarm optimization. Smart Mater Struct 24:35025. https://doi.org/10.1088/0964-1726/24/3/035025
Guide LL-TM user’s (1988) Undefined 2014 System identification toolbox. researchgate.net
Li WH, Zhou Y, Tian TF (2010) Viscoelastic properties of MR elastomers under harmonic loading. Rheol Acta. https://doi.org/10.1007/s00397-010-0446-9
Peng GR, Li WH, Du H et al (2014) Modelling and identifying the parameters of a magneto-rheological damper with a force-lag phenomenon. Appl Math Model 38:3763–3773. https://doi.org/10.1016/j.apm.2013.12.006
Wang Q, Dong X, Li L, Ou J (2017) A nonlinear model of magnetorheological elastomer with wide amplitude range and variable frequencies. Smart Mater Struct. https://doi.org/10.1088/1361-665X/aa66e3
Du H, Li W, Zhang N (2011) Semi-active variable stiffness vibration control of vehicle seat suspension using an MR elastomer isolator. Smart Mater Struct. https://doi.org/10.1088/0964-1726/20/10/105003
Zhao J, Bose BK (2002) Evaluation of membership functions for fuzzy logic controlled induction motor drive. In: IECON proceedings (industrial electronics conference). pp 229–234
Mamdani EH, Assilian S (1975) An experiment in linguistic synthesis with a fuzzy logic controller. Int J Man Mach Stud 7:1–13. https://doi.org/10.1016/S0020-7373(75)80002-2
Hellendoorn H, Thomas C (1993) Defuzzification in fuzzy controllers. J Intell Fuzzy Syst 1:109–123. https://doi.org/10.3233/IFS-1993-1202
Acknowledgements
The author(s) disclosed the receipt of the following financial support for the research, authorship and/or publication of this article. SOLVE supported this study—a virtual lab at NITK (Grant no. No.F.16-35/2009-DL, Ministry of Human Resource Development; www.solve.nitk.ac.in).
Funding
Open access funding provided by Manipal Academy of Higher Education, Manipal.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
I declare that there is no conflict of interest in the publication of this article and that there is no conflict of interest with any other author or institution for the publication of this article.
Additional information
Technical Editor by Pedro Manuel Calas Lopes Pacheco.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kiran, K., Poojary, U.R. & Gangadharan, K.V. Developing the viscoelastic model and model-based fuzzy controller for the MRE isolator for the wide frequency range vibration isolation. J Braz. Soc. Mech. Sci. Eng. 44, 275 (2022). https://doi.org/10.1007/s40430-022-03575-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-022-03575-y