
Abstract
The present work addresses a Gaussian process-based multi-fidelity computational scheme to enable the crystal plasticity modeling of Ti-7Al alloy. The crystal plasticity simulations are performed by using computational techniques that lead to two different solution fidelities. The first technique involves the use of a one-point probability descriptor, orientation distribution function (ODF), which measures the volume fractions of crystals in different orientations. The ODF is posed as the low-fidelity method in the multi-fidelity scheme since it neglects the effects of the microstructural correlations and grain shapes to the macro-scale stress-strain response of the material. For the high-fidelity computational technique, crystal plasticity finite element method (CPFEM) is utilized. This is because the CPFEM resolves better in grain-level microstructural features. However, the CPFEM is a computationally expensive technique and it is not feasible to be utilized for computationally costly problems. Therefore, a multi-fidelity modeling scheme that improves the low-fidelity ODF simulation data with the high-fidelity CPFEM simulations is utilized to obtain the crystal plasticity parameters. The presented approach uses more samples from the computationally less expensive low-fidelity model and less samples from the computationally expensive high-fidelity model to build a numerical framework that satisfies both accuracy and computational time expectations. The results of the presented multi-fidelity scheme show a significant improvement on the accuracy of the crystal plasticity modeling of Ti-7Al compared to the results of the previous low-fidelity solution.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
As we move towards a new era in computational design of materials with the encouragement of the Integrated Computational Materials Science (ICME) [1], computational tools providing certain accuracy and computational time efficiency are increasingly becoming significant. One critical area regarding the recent ICME efforts is the crystal plasticity modeling of the polycrystalline materials. Crystal plasticity provides an appropriate tool to investigate texture evolution and mechanical response of polycrystalline materials at the micro-scale [2,3,4] by applying elasto-viscoplastic constitutive laws [5] for various slip systems. For this purpose, crystal plasticity finite element method (CPFEM) is traditionally applied to compute the evolution of the polycrystalline microstructures subjected to large deformations. The CPFEM couples the engineering finite element models with microstructure constitutive models.
The crystal plasticity modeling of metallic materials highly depends on the identification of the active and inactive slip systems. The number of active slip systems actually determines the problem complexity. The Ti- 7 wt%-Al (Ti-7Al) alloy of interest in this work has a hexagonal close-packed (HCP) crystal structure. The HCP metals are known to exhibit an easy \(<a>\) slip, either on the prismatic or basal plane [6]. The slip systems of the Ti-7Al are determined as the three equivalent basal \({0001} <11\bar 20>\), three equivalent prismatic \({10\bar 10}<11\bar 20>\), and six equivalent pyramidal \({10\bar 11}<11\bar 20>\) slip systems [7]. All these three slip systems share a common slip direction, \(<11\bar 20>\), or \(<a>\). The slip on the basal, prismatic, and pyramidal slip systems is denoted as \(<a>\)-slip. Additional slip or twin mechanisms are required to accommodate a strain parallel to the c-axis of the hexagonal system. One mode slips on pyramidal planes with \(<11\bar 23>\), or \(<c+a>\) slip directions [7]. Moreover, the recent studies in the literature [6,7,8,9,10,11,12,13] revealed the existence of the \({10\bar 12} < \bar 1011 >\) tensile twin, which provides an approximately 90 degrees rotation of the c-axis from a tensile stress to the compressive stress condition and increases the basal texture intensity during compressive loading.
The crystal plasticity model should input the appropriate slip and twin information and be validated to obtain the feasible slip system parameters. Identification of the slip system parameters also leads to a good understanding of the texture evolution. However, in the case of Ti-7Al alloy, which is a titanium-aluminum alloy providing superior structural performance under large deformations and high thermal stresses, there is not a universal agreement on the values of the slip system parameters. There are some studies in the literature which address the slip system parameters [6, 8, 9, 14]. However, either the presented parameters have different values in different studies or the values of some parameters (slip hardening and twin system parameters) are missing. Therefore, the crystal plasticity model realization for Ti-7Al alloy is still an open problem in the literature to be addressed. The slip system parameters identification leads to an inverse (optimization) problem and thus, it requires the implementation of computationally efficient techniques, such as modeling with the orientation distribution function (ODF). The ODF is related to the volume fractions of different crystallographic orientations. The ODF approach was previously studied in the literature [15,16,17,18,19,20,21,22,23,24], and it was found to be faster and better suited to the computationally expensive crystal plasticity problems. However, the ODF representation does not contain information about the local neighborhood of the crystals. Therefore, the equilibrium across grain boundaries cannot be captured and the Taylor hypothesis [25] assuming that all crystals deform identically is utilized. This constraint actually leads to a stiff upper-bound response and sharper microstructural textures than the measured [26]. It also means that the number of zero-valued ODFs is higher than the number of non-zero ODFs in the measured texture data because of the constraint. Therefore, although improving the computational time efficiency significantly, the ODF approach does not lead to a higher resolution solution for the critical problems such as the slip system parameters identification problem in this work. On the other hand, the CPFEM provides high resolution solutions. However, the CPFEM is a computationally expensive technique and not well-suited to the computationally expensive problems like the slip system parameters identification problem in this work. The slip system parameters calibration was previously addressed in the previous work of the author by using a crystal plasticity model that is based on the ODF approach [27]. In this work, a multi-fidelity solution approach using both ODF and CPFEM techniques is utilized to improve the solution resolution and to satisfy the computational time requirements at the same time. The experimental tensile test data is utilized to find the slip system parameters by using the multi-fidelity approach. The organization of the paper is as follows. Section “Crystal Plasticity Modeling” briefly introduces the crystal plasticity modeling. The multi-fidelity modeling approach is discussed in section “Multi-fidelity Modeling for Crystal Plasticity.” The results of the calibration problem are presented in section “Calibration with Multi-fidelity Model.” A summary of the study with potential extensions as a future work are given in section “Conclusions.”
Crystal Plasticity Modeling
For crystal plasticity modeling, the rate-independent single crystal plasticity constitutive model developed by Anand and Kothari [2] is used to compute the macroscopic stress of the polycrystalline material. The parameters of interest in this work are the slip system parameters, and the used slip system hardening model is given below:
where \(h^{\beta }\) is a single slip hardening rate, q is the latent-hardening ratio, and \(\delta ^{\alpha \beta }\) is the Kronecker delta function. The parameter q is taken to be 1.0 for coplanar slip systems and 1.4 for non-coplanar slip systems. For the single-slip hardening rate, the following specific form is adopted:
where \(h_{o}\), a, and \(s_{s}\) are slip hardening parameters. The basal \(<a>\), prismatic \(<a>\), pyramidal \(<a>\) and pyramidal \(<c+a>\) slip systems, and \({10\bar 12} < \bar 1011 >\) twinning mechanism are computationally modeled. The elastic parameters of Ti-7Al are taken as [28]: \(C_{11} = C_{12} = 175\) GPa, \(C_{33} = 220\) GPa, \(C_{12} = 88.7\) GPa, \(C_{13} = C_{23} = 62.3\) GPa, \(C_{44} = C_{55} = 62.2\) GPa, and \(C_{66} = (C_{11}-C_{12})/2\). The details about the crystal plasticity modeling can be found in details in ref. [27].
We will use two techniques, CPFEM and ODF, to achieve the multi-fidelity modeling and calibration for the slip system parameters. The CPFEM resolves better in small-scale features, which leads to better accuracy for crystal plasticity features. However, it is a computationally costly algorithm and not suitable for high-performance applications such as model calibration studies similar to the problem of interest in this work. Therefore, the ODF is introduced as a computationally efficient alternative to the CPFEM. The ODF is a one-point probability measure, which quantifies the volume fractions of the crystals in the orientation space. The ODF is defined based on a parameterization of the crystal lattice rotation. It is discretized over the Rodrigues domain by using a finite element method. The computation procedure for microstructural features and material properties by using the ODF approach has been presented before in the earlier works of the author [15, 16, 29, 30] and it will not be repeated here for brevity. The ODF is required to be updated during deformation because of the reorientation of the grains. The associated probabilities are evolved from time \(t = 0\), where the initial texture is described by the initial ODF. More details about the ODF update procedure can be found in ref. [15, 16]. The details regarding the constitutive model and its integration into the ODF approach can be found in refs. [2, 16]. The Ti-7Al alloy has an HCP crystallographic structure, and it is modeled by using 50 independent ODF values (corresponding to 111 nodal point ODFs) as illustrated in Fig. 1 [27]. Figure 1 shows the Rodrigues fundamental region that is discretized using a finite element approach, and each nodal point of the finite element mesh is associated with a particular ODF value. In Fig. 1, the independent 50 nodal points are shown with the red color. The remaining 61 nodal points, which are shown with the blue color in Fig. 1, have the same ODF values with the independent nodal points because of the hexagonal crystallographic symmetry. On the other hand, the CPFEM simulation models the microstructure using 750 grains (Fig. 2) and \(32 \times 32 \times 32\) elements. The grain orientations in the CPFEM simulation are assigned to match with the random initial texture assumption.

The ODF representation in the Rodrigues fundamental region for hexagonal crystal symmetry showing the location of the k = 50 independent nodes of the ODF in red color

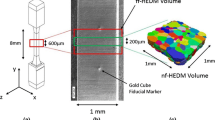
The input microstructure representation for the CPFEM simulation
The description for the used experimental data is given as follows [15]. The sample Ti-7Al alloy has a beta transus temperature of \(1050~^{\circ }\)C. The alloy was forged from a 7.5-in. round ingot to a 4-in. square ingot at \(1142~^{\circ }\)C and air cooled. Three different cylindrical samples 6 mm in diameter and 9 mm in height were machined from the forged ingot. The samples were then subject to the same process: compression to a 20% height reduction at a strain rate of 0.03 mm/min at room temperature followed by annealing in a tube furnace at \(800~^{\circ }\)C for 72 h followed by a water quench. The samples were sectioned perpendicular to the compression axis, mounted in epoxy and polished to a final step of colloidal silica. The measured texture was found to be close to the randomly oriented texture. Therefore, in this work, the initial texture is assumed to be random (all the ODFs are equal) in crystal plasticity simulations. Although being computationally efficient, the ODF is actually a lower-fidelity descriptor of the microstructures since it does not contain information regarding the local neighborhood of the crystals. The ODF approach leads to the assumption that all crystals deform identically and it neglects the effects such as crystal size and shape. Therefore, the ODF solutions are not as accurate as the high-fidelity CPFEM results. For the critical applications that affect our understanding of the problem, using the ODF approach may not lead to high-fidelity predictions. Therefore, in this work, our goal is to make use of the advantages of both techniques (CPFEM and ODF), to identify the slip system parameters for the Ti-7Al alloy.
The slip system parameters identification problem was previously studied in ref. [27] using the ODF approach. In the previous work [27], the parameters (s0, \(h_{0}\), \(s_{s}\), and a) for each of the four (basal \(<a>\), prismatic \(<a>\), pyramidal \(<c+a>\), and pyramidal \(<a>\)) slip and tensile twin systems (a total of 20 parameters) were modeled. The available experimental data for the tensile stress-strain curve was utilized for the calibration problem to obtain the optimum slip system parameters with the ODF approach. However, the comparison of the CPFEM analysis to the ODF solution reveals the necessity of utilizing a higher fidelity solution technique to the calibration problem. The comparison of the experimental tensile stress-strain curve behavior to the CPFEM and ODF solutions is given in Fig. 3. As shown in Fig. 3, the CPFEM solution does not lead to a good match with the experimental data when the optimum slip system parameters that were previously identified by the ODF approach are utilized. Another result than can be drawn from Fig. 3 is that the ODF model produces a stress-strain curve which is below the stress-strain curve of the CPFEM solution. However, the ODF model should actually provide a stiffer response since it is associated with the upper bound solution. Therefore, the ODF solution is expected to compute higher stress values than the CPFEM model. The results in Fig. 3 imply that the low-fidelity ODF model has accuracy/sensitivity issues for the previously computed optimum values of the slip system parameters. These optimum slip system parameters actually lead to an extreme case since the global optimum solution is a highly sensitive solution in the design space. Hence, the corresponding ODF prediction leads to a low-accuracy result. Therefore, Fig. 3 should be taken as a sign that the low-fidelity ODF solution is not able to provide reliable results when it is preferred as the only modeling technique to obtain the slip system parameters. To improve the solution accuracy for the slip system parameters identification, in this work, we utilize a multi-fidelity approach that makes use of the computational time efficiency of the ODF approach and high accuracy of the CPFEM solution. Since the ODF approach leads to computational efficiency, the number of low-fidelity samples (the design samples generated with the ODF method) is higher than the number of high-fidelity samples (the design samples generated with the CPFEM). The details of the multi-fidelity approach is explained next.

Comparison of the ODF and CPFEM solutions with the experimental data
Multi-fidelity Modeling for Crystal Plasticity
The multi-fidelity modeling aims to utilize computational solutions with different fidelity levels [31,32,33,34]. A low fidelity model is defined as the model producing outputs that are less accurate than the outputs of the higher fidelity solutions [35]. Therefore, the lowest fidelity approach does not necessarily represent an inaccurate solution. Instead, the resolution is lower than the high-fidelity model. Multi-fidelity modeling has been studied in different applications of fluid mechanics [31, 36, 37] and solid mechanics [38,39,40,41]. A detailed review of the multi-fidelity modeling techniques in various disciplines varying from fluid dynamics to solid mechanics is presented in ref. [42]. It was observed that the multi-fidelity modeling of solid mechanics problems usually consists of a straightforward approach where high fidelity computational models are verified against simple analytical solutions [43], unlike the present work which utilizes both high and low-fidelity computational models. Despite the applications in other fields, the application area of multi-fidelity modeling is not common in materials modeling, especially in the microstructural scale [42].
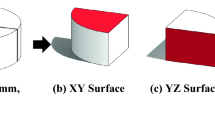
The multi-fidelity modeling aims to take advantage of the accuracy of high-fidelity models and computational time efficiency of the low-fidelity models and generates a numerical function to calculate the output parameters in terms of the model inputs. To satisfy the computational time efficiency expectations, the multi-fidelity modeling uses more data from the computational time efficient low-fidelity model. On the other hand, to satisfy the accuracy expectations, the multi-fidelity model can be calibrated by using the more accurate high-fidelity data. An illustration of the multi-fidelity solution approach for crystal plasticity modeling of Ti-7Al alloy is shown in Fig. 4.

Multi-fidelity solution approach for crystal plasticity modeling of Ti-7Al alloy
The multi-fidelity modeling in this work utilizes the Gaussian Process technique. The Gaussian Process method interpolates the high-fidelity points and tunes the low-fidelity solution according to the error prediction. The method can be extended to study the correlation between low and high fidelity samples. The Gaussian process model is adapted to perform multi-fidelity analysis, modeling, and optimization [44, 45]. Gaussian process regression and non-linear autoregressive schemes are also preferred to generate surrogates using multi-fidelity modeling [46]. More details about the Gaussian process models and their progress over the last decade can be found in the review presented in ref. [47]. The mathematical background of the Gaussian process model is explained next.
Let \(\boldsymbol {x}\) represent the input parameter and \(\boldsymbol {Y}\) show the output parameters in data or in the high-fidelity model. Therefore, in this study, \(\boldsymbol {x}\) is related to the slip system parameters and \(\boldsymbol {Y}\) is related to the objective function used in the CPFEM model. The objective function is defined as the difference between the experimental and computational stress-strain curves in terms of the \(L_{2}\) norm error. The expected value of the output parameters is defined as follows:
The multi-fidelity model is a Gaussian process such that \({\tilde y}(\boldsymbol {x}) \sim \mathcal {N}(\mu _{\tilde y}, \sigma _{\tilde y}^{2})\), where \(\mu _{\tilde y}\) and \(\sigma _{\tilde y}^{2}\) are the mean value and variance of the multi-fidelity prediction, \({\tilde y}\). Assuming that \(\boldsymbol {x}\) and \(\boldsymbol {\tilde x}\) show the high-fidelity and low-fidelity model input data points respectively, the covariance expression is defined in terms of the kernel, \(\boldsymbol {k}\). The covariance can be approximated by using various definitions of the kernel, such as a constant (leads to ordinary Kriging method), linear, polynomial, rational quadratic, exponential, and squared exponential formulations [48]. In this work, the rational quadratic function is used to define the kernel as shown in Eq. 4.
where \(\alpha \) and l are the Gaussian process model fitting parameters (hyper-parameters) to be calculated. Here, \(\alpha , l > 0\) can be interpreted as a scale mixture of the covariance functions with different characteristic length-scales. The goal of the multi-fidelity modeling approach is to compute the value of \(Y_{*} = f(x_{*})\), where \(x_{*}\) is the desired input value that the multi-fidelity model response, \(Y_{*}\), is computed for. The corresponding covariance matrices are given as
where n is the number of design samples. In this work, the design samples include both ODF and CPFEM data such that \(n = m+p\) and \(m<p\) (or \(m<<p\)), where m is the number of high-fidelity design samples, and p is the number of low-fidelity design samples. The covariance products can be arranged as follows by using low and high-fidelity models:
where \(\boldsymbol {K_{AA}}\) and \(\boldsymbol {K_{BB}}\) include the covariance entries for the low-fidelity (ODF) and high-fidelity (CPFEM) models. The covariance entries \(\boldsymbol {K_{AB}}\) and \(\boldsymbol {K_{BA}}\) define the relationship between the low and high-fidelity samples by using the covariance formulation given in Eq. 4. In Eq. 9, the entries in the \(\boldsymbol {K}_{*AA}\) vector are the products of the low-fidelity samples and desired input parameter set, \(x_{*}\), and the entries in \(\boldsymbol {K}_{*BB}\) vector are the products of the high-fidelity samples and desired input parameter set. The superscripts LF and HF denote low-fidelity and high-fidelity respectively. The multi-fidelity model approximation for the response value is then given by:
All covariance entries in the presented multi-fidelity formulation are products of the kernel, k, which is approximated by the rational quadratic function in Eq. 4 in terms of two Gaussian process model parameters, \(\alpha \) and l. To achieve an accurate multi-fidelity model representation, these parameters are optimized by solving the following problem:
In Eq. 11, the optimization problem to find the hyper-parameters, \(\alpha \) and l, is defined by using the high-fidelity data since the accuracy of the high-fidelity data is assumed to be better than the low-fidelity data. The objective function is to minimize the sum of the \(L_{2}\) norm errors between the Gaussian process prediction, \(Y_{*}^{i}\), and high-fidelity model output, \(Y_{i}\), for all available high-fidelity samples (i = 1,2,..,m). The multi-fidelity model representation is calibrated by obtaining the hyper-parameters that minimize the given objective function in Eq. 11. To generate the multi-fidelity model, we use 100 low-fidelity model samples (ODF samples with \(p = 100\)) and 10 high-fidelity model samples (CPFEM samples \(m = 10\)). The corresponding output information is stored in terms of the \(L_{2}\) norm error which gives the difference between the experimental stress points and computational outputs. The hyper-parameters are calculated by using the formulation in Eq. 11 for 10 high-fidelity (CPFEM) model samples and they are found as \(\alpha = 3.9168\) and \(l = 3.9263\).
Calibration with Multi-fidelity Model
With the generation of the multi-fidelity model, the next step is to utilize the generated model for the slip system parameters calibration problem of Ti-7Al alloy. To identify the optimum set of slip system parameters that leads to the minimum difference between the experimental data and computational (multi-fidelity) outputs, we follow a similar approach to the previously presented calibration problem that was solved by the ODF approach in ref. [27]. The mathematical definition of the calibration problem for slip system parameters identification is given in Eqs. 12 and 13.
In Eq. 12, \(\epsilon _{t}\) shows the \(L_{2}\) norm errors between true stress points of the experimental data and multi-fidelity simulation for tension (denoted by t) test. The experimental data is available up to \(15\%\) strain. Therefore, the simulations used in the multi-fidelity scheme are carried out for the same strain level. The strain rate is defined as \(2.5 \times 10^{-4}\), and a quadratic interpolation is implemented to match the experimental and computational (multi-fidelity model) strain points. In Eq. 13, s shows the vector representation of 20 variables (4 variables per each slip and twin mechanism). The calibration problem is solved with the multi-fidelity model using Sequential Quadratic Programming (SQP) algorithm. The initial guess in the SQP algorithm is assumed to be the optimum slip system parameters that were obtained by using the ODF model [27]. The optimum slip system parameters identified with the multi-fidelity modeling approach are presented and compared to the low-fidelity ODF solution in Table 1.
In Table 1, \(h_{0}\) and a denote the \(h_{0}\) and a values for basal \(<a>\), prismatic \(<a>\), pyramidal \(<a>\) and pyramidal \(<c+a>\) slip systems, and \(s_{s}\) represents the \(s_{s}\) value for all slip systems and twinning. The multi-fidelity modeling approach identifies the same optimum values for some of the parameters with the low-fidelity solution as shown in Table 1. However, for some of the parameters (such as \(s_{0}\) (twin), \(s_{s}\) and a), the optimum values obtained with the multi-fidelity modeling approach are considerably different than the values found by using the low-fidelity model. The main reason of having different optimum values is that these parameters are also less sensitive parameters to the objective function (minimum error that is calculated by comparing the computational output to the experimental data) as discussed in our previous work [27]. Therefore, it can be concluded that the low-fidelity model is not able to fully capture the effects of less sensitive parameters. However, to fully understand the crystal plasticity behavior of the alloy, all parameters should be accurately captured, which shows the necessity of applying multi-fidelity techniques to improve the accuracy of the computational simulations. The high-fidelity model is simulated to compute the tensile stress-strain behavior by using the optimum parameters that are obtained with the multi-fidelity approach. The output of the multi-fidelity approach is compared to the available experimental data and previously obtained low-fidelity optimum solution (Ref. [27]) in Figs. 5 and 6.

Tensile true stress-true strain curve results for Ti-7Al

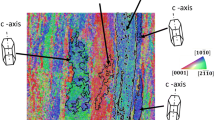
Final texture comparisons at 13.5% tensile strain for Ti-7Al in Rodrigues orientation space
One important result that can be drawn from Fig. 5 is that the low-fidelity solution is not able to capture the initiation of the plastic behavior accurately. In addition, the final texture obtained at 13.5% tensile strain with the multi-fidelity model provides a more accurate texture representation in comparison with the experimental data in Fig. 6 since the ODF intensities are better captured compared to the low-fidelity model. There is a notable improvement in the crystal plasticity modeling accuracy with the introduction of the multi-fidelity modeling scheme. Note that the multi-fidelity scheme utilizes mostly the low-fidelity ODF model but feeds some information from the CPFEM to improve the accuracy of the low-fidelity representation. Figure 5 indicates that the multi-fidelity modeling can actually provide a considerable improvement in the accuracy of the ODF model by only using 10 design samples generated by the CPFEM model, which also makes it a computational time efficient strategy in modeling materials.
Conclusions
A calibration approach based on multi-fidelity modeling to identify the slip system parameters of Ti-7Al alloy is presented. The multi-fidelity modeling scheme uses a low-fidelity model which is computational time efficient but provides lower solution resolution and a high-fidelity model that provides high solution resolution but does not lead to computational time efficient simulations. The goal is to generate a new numerical model that takes advantage of the computational time efficiency of the low-fidelity model, and the high accuracy of the high-fidelity model. In this work, the low-fidelity solution is based on a one-point probability descriptor, ODF and the high-fidelity solution utilizes the CPFEM. Next, a Gaussian process-based multi-fidelity model is developed to study the crystal plasticity behavior of Ti-7Al alloy. The crystal plasticity model is calibrated by using the design samples generated with the low and high-fidelity models. To satisfy the computational time efficiency, more design samples are generated by using the low-fidelity ODF solution. However, to achieve a certain accuracy with the multi-fidelity modeling scheme, the high-fidelity CPFEM samples are also used in the calibration problem to find the hyper-parameters of the multi-fidelity model. Next, the multi-fidelity model is integrated into a gradient-based optimization scheme to obtain the slip system parameters of Ti-7Al which minimize the difference between the available experimental data and multi-fidelity simulation output. The optimum multi-fidelity solution is also compared to the previously identified solution with the low-fidelity ODF model and found to improve the accuracy of the crystal plasticity model significantly. The presented problem mathematically corresponds to a curve-fitting problem that can also be solved with various optimization techniques. However, the strength of the multi-fidelity approach is that it feeds the low-fidelity model with high-fidelity model results that capture the physics of the problem better. Therefore, it can be concluded that the multi-fidelity approach not only improves the mathematical aspect of the solution strategy but also leads to a more physical solution compared to the physical information represented by the low-fidelity model. Moreover, the high-fidelity model can also be defined in terms of the available experimental data such as the slip system parameters information presented in Refs. [49, 50] using high-energy X-ray diffraction techniques. A multi-fidelity solution approach utilizing the ODF model and experimental data can be a scope of the future work. Another future work in this field may concentrate on modeling the uncertainties arising from the experimental imperfections. With the integration of the multi-fidelity optimization scheme to the stochastic modeling of crystal plasticity, the optimization for the slip system parameters may be performed by considering the effects of experimental uncertainties as a future work.
References
Allison J, Backman D, Christodoulou L (2006) Integrated computational materials engineering: a new paradigm for the global materials profession. J Miner Met Mater Soc 25:25–27
Anand L, Kothari MA (1996) Computational procedure for rate-independent crystal plasticity. J Mech Phys Solids 44:525–558
Asaro RJ, Needleman A (1985) Texture development and strain hardening in rate dependent polycrystals. Acta Metall 33:923–953
Bronkhorst CA, Kalidindi SR, Anand L (1992) Polycrystalline plasticity and the evolution of crystallographic texture in FCC metals. Philos Trans R Soc London A 341:443–477
Staroselsky A, Anand L (2003) A constitutive model for hcp materials deforming by slip and twinning: application to magnesium alloy AZ31B. Int J Plast 19(10):1843–1864
Nervo L, King A, Fitzner A, Ludwig W, Preuss M (2016) A study of deformation twinning in a titanium alloy by X-ray diffraction contrast tomography. Acta Mater 105:417–428
Balasubramanian S (1998) Application to deformation processing of lightweight metals. Ph.D. Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA
Williams JC, Baggerly RG, Paton NE (2002) Deformation behavior of HCP Ti-Al alloy single crystals. Metall Mater Trans A 33:837
Lutjering G, Williams J (2007) Introduction in titanium, 2nd edn. Springer, Berlin
Lienert U, Brandes MC, Bernier JV, Weiss J, Shastri SV, Mills MJ, Miller MP (2009) In-situ single-grain peak profile measurements on Ti-7 Al during tensile deformation. Mater Sci Eng A 524:46–54
Khan AS, Kazmia R, Farrokha B, Zupana M (2007) Effect of oxygen content and microstructure on the thermo-mechanical response of three Ti-6Al-4V alloys: experiments and modeling over a wide range of strain-rates and temperatures. Int J Plast 23:1105–1125
Fitzner AG (2014) Effects of alloying elements on twinning in alpha-titanium alloys. Ph.D. Dissertation, University of Manchester, Manchester, UK, 261
Fitzner AG, Prakash DGL, Fonseca JQ, Thomas M, Zhang S, Kelleher J, Manuel P, Preuss M (2016) The effect of aluminum on twinning in binary alpha-titanium. Acta Mater 103:341– 351
Shahba A, Ghosh S (2016) Crystal plasticity FE modeling of Ti alloys for a range of strain-rates. Part I: a unified constitutive model and flow rule. Int J Plast 87:48–68
Acar P, Sundararaghavan V (2017) Uncertainty quantification of microstructural properties due to variability in measured pole figures. Acta Mater 124:100–108
Acar P, Sundararaghavan V (2016) Utilization of a linear solver for multiscale design and optimization of microstructures in an airframe panel buckling problem. In: Proceedings of the 57th AIAA/ASCE/AHS/ASC structures, structural dynamics, and materials conference. San Diego, CA, USA, 4–8 January
Sundararaghavan V, Zabaras N (2005) On the synergy between texture classification and deformation process sequence selection for the control of texture-dependent properties. Acta Mater 53:1015–1027
Liu R, Kumar A, Chen Z, Agrawal A, Sundararaghavan V, Choudhary A (2015) A predictive machine learning approach for microstructure optimization and materials design. Nat Sci Rep 5:11551
Sarma GB, Dawson PR (1996) Effects of interactions among crystals on the inhomogeneous deformations of polycrystals. Acta Mater 44:1937–1953
Raabe D, Roters F (2004) Using texture components in crystal plasticity finite element simulations. Int J Plast 20:339– 361
Matthies S, Wenk H -R, Vinel GW (1988) Some basic concepts of texture analysis and comparison of three methods to calculate orientation distributions from pole figures. J Appl Cryst 21:285–304
Dawson PR, Marin EB (1997) Computational mechanics for metal deformation processes using polycrystal plasticity. Adv Appl Mech 34:77–169
Zheng QS, Zou WN (2001) Orientation distribution functions for microstructures of heterogeneous materials (I)—Directional distribution functions and irreducible tensors. Appl Math Mech 22:865–884
Pospiech J, Lucke K, Sztwiertnia K (1993) Orientation distribution and orientation correlation functions for description of microstructures. Acta Metall Mater 41:305–321
Taylor G (1938) Plastic strain in metals. J Instit Metals 62:307–324
Kocks UF, Tome CN, Wenk HR (2000) Texture and anisotropy. Cambridge University Press, Cambridge, UK
Acar P, Ramazani A, Sundararaghavan V (2017) Crystal plasticity modeling and experimental validation with an orientation distribution function for Ti-7Al alloy. Metals 7(11):459
Sha W, Malinov S (2009) Titanium alloys: modelling of microstructure, properties and applications. Elsevier, Amsterdam, The Netherlands
Acar P, Sundararaghavan V (2017) Uncertainty quantification of microstructural properties due to experimental variations. AIAA J 55(8):2824–2832
Acar P, Sundararaghavan V (2016) Linear solution scheme for microstructure design with process constraints. AIAA J 54(12):4022–4031
Forrester AI (2010) Black-box calibration for complex-system simulation. Philos Trans R Soc London A: Math Phys Eng Sci 368(1924):3567–3579
Huang D, Allen T, Notz W, Miller R (2006) Sequential kriging optimization using multiple-fidelity evaluations. Struct Multidiscip Optim 32(5):369–382
Le Gratiet L (2013) Bayesian analysis of hierarchical multifidelity codes. SIAM/ASA J Uncert Quantif 1 (1):244–269
Goh J, Bingham D, Holloway JP, Grosskopf MJ, Kuranz CC, Rutter E (2013) Prediction and computer model calibration using outputs from multifidelity simulators. Technometrics 55(4):501–512
Peherstorfer B, Willcox K, Gunzburger M (2016) Survey of multifidelity methods in uncertainty propagation, inference, and optimization. ACDL Technical Report TR16-1, 1–57
Castro JPJ, Gray GA, Hough PD, Giunta AA (2005) Developing a computationally efficient dynamic multilevel hybrid optimization scheme using multifidelity model interactions, Technical report, SAND2005-7498 Sandia National Laboratories, Albuquerque, NM
Keane AJ (2012) Cokriging for robust design optimization. AIAA J 50(11):2351–2364
Sharma A, Gogu C, Martinez OA, Sankar BV, Haftka RT (2008) Multi-fidelity design of an integrated thermal protection system for spacecraft reentry. In: 49th AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics, and materials conference. Schauroburg, Illinois, USA
Venkataraman S (2006) Reliability optimization using probabilistic sufficiency factor and correction response surface. Eng Optim 38(6):671–685
Venkataraman S, Haftka R, Johnson T (1998) Design of shell structures for buckling using correction response surface approximations. In: 7th AIAA/USAF/NASA/ISSMO symposium on multidisciplinary analysis and optimization. St. Louis, MO
Goldfeld Y, Vervenne K, Arbocz J, Van Keulen F (2005) Multi-fidelity optimization of laminated conical shells for buckling. Struct Multidiscip Optim 30(2):128–141
Fernandez-Godino MG, Park C, Kim N-H, Haftka RT (2016) Review of multi-fidelity models. arXiv:http://arXiv.org/abs/1609.07196
Kopp R, Gardea F, Glaz B, Smith EC (2017) Multi-fidelity modeling of interfacial micromechanics for off-aligned polymer/carbon nanotube nanocomposites. In: 58th AIAA/ASCE/AHS/ASC structures, structural dynamics, and materials conference. Grapevine, TX, USA
Kuya Y, Takeda K, Zhang X, Forrester AJJ (2011) Multifidelity surrogate modeling of experimental and computational aerodynamic data sets. AIAA J 49(2):289–298
Forrester AJJ, Sobester A, Keane AJ (2007) Multifidelity optimization via surrogate modeling. Proc R Soc A 463(2088):3251–3269
Perdikaris P, Raissi M, Damianou A, Lawrence ND, Karniadakis GE (2017) Nonlinear information fusion algorithms for data-efficient multi-fidelity modeling. Proc R Soc A 473(2198):20160751
Viana FAC, Simpson TW, Balabanov V, Toropov V (2014) Metamodeling in multidisciplinary design optimization: how far have we really come? AIAA J 52(4):670–690
Wilson A, Adams R (2013) Gaussian process kernels for pattern discovery and extrapolation. Proceedings of the 30th International Conference on Machine Learning PMLR 28(3):1067–1075
Pagan DC, Bernier JV, Dale D, Ko JYP, Turner TJ, Blank B, Shade PA (2018) Measuring Ti-7Al slip system strengths at elevated temperature using high-energy x-ray diffraction. Scr Mater 142:96–100
Pagan DC, Shade PA, Barton NR, Park J -S, Kenesei P, Menasche DB, Bernier JV (2017) Modeling slip system strength evolution in Ti-7Al informed by in-situ grain stress measurements. Acta Mater 128:406–417
Acknowledgements
The author would like to acknowledge that the experimental data used in this work was provided by Dr. Anna Trump and Prof. John Allison (Materials Science and Engineering) at the University of Michigan.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Acar, P. Crystal Plasticity Model Calibration for Ti-7Al Alloy with a Multi-fidelity Computational Scheme. Integr Mater Manuf Innov 7, 186–194 (2018). https://doi.org/10.1007/s40192-018-0120-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40192-018-0120-0