
Abstract
On the basis of the theory of thermodynamics, a new formalism of classical nonrelativistic mechanics of a mass point is proposed. The particle trajectories of a general dynamical system defined on a -dimensional smooth manifold are geometrically treated as dynamical variables. The statistical mechanics of particle trajectories are constructed in a classical manner. Thermodynamic variables are introduced through a partition function based on a canonical ensemble of trajectories. Within this theoretical framework, classical mechanics can be interpreted as an equilibrium state of statistical mechanics. The relationship between classical and quantum mechanics is discussed from the viewpoint of statistical mechanics. The maximum-entropy principle is shown to provide a unified view of both classical and quantum mechanics.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Quantum mechanics is considered to be the most basic theory of nature. All phenomena, including gravitational interactions, have an underlying quantum-mechanical interpretation. Quantum mechanics describes the microscopic behavior of particles under fundamental forces and has been adopted in numerous applications. However, our understanding of quantum mechanics remains incomplete. One of the most characteristic and mysterious aspects of quantum mechanics is that particle properties are described by probability amplitudes. The probabilistic aspects of quantum mechanics are inherent characteristics and are not due to lack of detailed information such as partition functions in statistical mechanics. Therefore, understanding why and how the probabilistic nature of quantum mechanics emerges from a primary principle is of critical importance. To pursue this purpose, we propose herein to use a thermodynamic theory.
Let us recall the relationship between thermodynamics and statistical mechanics. Thermodynamics is a field of physics that discusses the relationship between the macroscopic physical quantities such as temperature, pressure, volume, energy, entropy, and heat and/or work from outside of the system. Thermodynamics was established before the microscopic details were clarified. Later, statistical mechanics was constructed on the basis of the microscopic details of classical mechanics using thermodynamics as a guiding principle. However, statistical mechanics based on classical mechanics failed to explain, for instance, the entire nature of electromagnetic waves radiated from gases and metals, which provided a hint about quantum mechanics. Although the microscopic details of statistical mechanics were replaced by quantum mechanics instead of by classical mechanics, the consequences of thermal dynamics remain true, and again thermal dynamics plays the role of a guiding principle in constructing a theory. Thermodynamics and its second law are still active in the field of physics, and are discussed, for instance, by Lieb and Yngvason [12] in their epoch-making paper. Relationships between thermodynamics and quantum mechanics are also intensively discussed by Gemmer et al. [6]. They gave new explanations for the emergence of thermodynamics behavior from a quantum mechanical system. Our way is something opposite to their intention, “the emergence of quantum mechanics from the thermodynamics”.
In our pursuit of the principle that underlies the probabilistic characteristics of the basic equations of motion, we suspend the notion that quantum mechanics is the most fundamental theory of nature and regard it as a phenomenological theory. In other words, we propose to construct the thermodynamics of quantum mechanics and then pursue the underlying mechanics, which must be a more fundamental theory of nature. In this study, we attempt to construct the thermodynamics of classical and quantum mechanics of a mass point. To construct the thermodynamics of classical mechanics, an appropriate definition of entropy must be introduced. To determine the entropy of the classical dynamical system of a mass point, we consider the system in geometrical terms and introduce a general dynamical system Arnol’d et al. [1]. Then, the analogy between the thermodynamics of gases and the Hamiltonian formalism of classical dynamics guides us to identify an appropriate definition of entropy. An equation of motion of the system can be extracted by requiring the maximum-entropy principle (instead of the principle of least action). Finally, quantum fluctuations can be understood in analogy with thermal fluctuations. This view may bring new insights of quantum mechanics.
This paper is organized as follows: After introducing a general framework for dynamic systems in Sect. 1, a generalized Hamiltonian formalism is developed in Sect. 2. The statistical mechanics of particle trajectory in the proposed framework is developed in Sect. 3. Here, we demonstrate that a thermal-equilibrium state of the trajectory corresponds to the classical mechanics of a mass point. Section 4 is devoted to relating classical and quantum mechanics using the statistical mechanics analogy. Conclusions and further discussion are presented in Sect. 5.
General mechanics
Dynamics on a symplectic manifold
First, we introduce a general dynamic space on which various dynamical systems are developed. A structure given here is a common for classical dynamic systems treated in this report. It is considered to give the minimum mathematical system to discuss classical mechanics.
Definition 2.1
General Dynamic Space A general dynamical space is a collection of sets, whose elements are defined as follows:
-
1.
A manifold is an -dimensional Euclidean space called a space manifold.
-
2.
A manifold is a one-dimensional smooth manifold called a time manifold. A point on is called an order parameter or time.
-
3.
The direct product is a space-time manifold. A position vector on an open neighborhood of a point can be expressed in terms of local orthonormal bases as
A flat metric whose metric tensor is imposed on the space-time manifold. Then, the becomes a Riemannian manifold with an indefinite metric.
-
4.
A tangent bundle of is written as . A tangent vector to is expressed as
-
5.
In the same manner, we introduce a cotangent bundle, , with cotangent vector to expressed as
-
6.
A characteristic function is a -function that maps a point on to a real number. The characteristic function is assumed holomorphic for a position vector such that .
-
7.
A momentum vector is introduced in terms of the characteristic function as
where . Here we follow the Einstein convention in summing the repeated indices, summing the Greek indices from to , and summing the Roman indices from to , unless otherwise stated. Not all ’s and ’s are independent because the characteristic function imposes a constraint. We assume that the zeroth component of the momentum vector is a function of other components, . A direct product of position and momentum vector space is called an extended phase space. This space is a -dimensional smooth manifold.
-
8.
On the extended phase-space, - and -forms such as
(1)(2)(3)are defined [1], which are called characteristic -form and -form, respectively. The characteristic -form is assumed to be a closed form satisfying . The even dimensional manifold that has a non-degenerate and closed -form is called a symplectic manifold.
Definition 2.2
Time evolution operator and Trajectory The smooth map
is called a time evolution operator. The map generates a one-dimensional manifold , such that
This manifold is called a trajectory.
We assume that a tangent vector exists for a given trajectory, i.e.,
at any . The time evolution operator maps a momentum vector as
The time evolution operator, which introduces dynamics to the general dynamic space, must describe some physical principle. More specifically, the following is true.
Principle 1
(Cartan) [2, 15] When the integration of the characteristic -form is invariant under map , i.e.,
the trajectory induced by is physically realized. Here is any closed circle in an extended phase space at fixed .
Theorem 2.1
(Characteristic Equations) Trajectories satisfying Principle 1 determine an equation of motion such that
which are known as characteristic equations.
Here is the tangent vector along the trajectory , defined as
where is assumed to be a function of and .

Cartan tube
Proof
The characteristic forms along the trajectory can be written as
and by definition
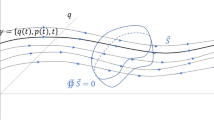
Here we used a property of an exterior derivative, for any and , and . Note that Eq. (5) is a simplified expression of Eq. (4). Consider the Cartan tube shown in Fig. 1. Let be a closed circle at , and . The cylindrical surface of the Cartan tube consists of trajectories connected from to . By Stokes’ theorem, an integration of the characteristic -form on vanishes,Footnote 1 i.e.,
where the last equivalence follows from the definition of the trajectory, which maintains constant . On the other hand, by contraction of the left-hand side of Eq. (6) with , we obtain
where is a contraction of two forms. The third step of this contraction uses Eq. (5). For the integral to identically vanish on any , each term in the parentheses must be zero.
This proof immediately leads to the following remark.
Remark 1
(Coordinate independent representation) The characteristic equations can be expressed independently of the coordinates as
Proof
The proof is evident from Eq. (7), which is true for all .
Hereafter, the of the trajectory is omitted for simplicity.
Definition 2.3
(Hamiltonian, Lagrangian and Action) A Hamiltonian, , is defined from the zeroth component of the momentum vector as
from which an integration of the characteristic -form along a trajectory can be expressed as
This integral is called an action, where is the trajectory and is a pull of by . The characteristic -form can be expressed as
Here is the Lagrangian.
Since the action is independent of the parameterization of the trajectory, the pull of the trajectory is hereafter omitted unless required for clarity. The action can be interpreted as the “distance” between two points on the space-time manifold measured by the characteristic -form . A detailed treatment of the trajectory is given in Sect. 3.
Examples of dynamics
Here we provide two concrete examples of the general dynamical space from thermodynamics and Hamiltonian mechanics. Similarity between these two examples guides us to new insights in classical dynamics.
Example 1
(Irreversible thermodynamics)Footnote 2
First, let us consider an isolated system of gas. The adiabatic free expansion of an isolated system enlarges the entropy (according to the second law of thermodynamics) and maintains constant temperature because heat energy cannot be gained or lost. In this case, the order parameter is entropy , while the one-dimensional space-manifold is volume . The thermodynamics is described by the following characteristic function:
where is the pressure of gas in an insulating container and is the pressure of the system. From the thermodynamic characteristic function, can be obtained as . The general dynamical space then becomes
The characteristic function can be expressed as a scalar function on the space-time manifold as follows:
We assume that a Hamiltonian exists such that . From the characteristic function and space-time manifold, we obtain the following characteristic equations:
These are known as the Maxwell relations for an adiabatic transition. The characteristic -form corresponds to the energy of the system ().Footnote 3
Next let us consider a system contained in an insulating container with an expandable wall and its isothermal reversible transition. The initial temperature of the system is . The system is attached to a heat bath of temperature and pressure is maintained constant. Here temperature is adopted as the order parameter () because temperature increases monotonically in this case. In this example, the one-dimensional space-manifold is pressure . From the characteristic function, Eq. (10), can be obtained as , and the general dynamical space becomes
and the characteristic functions are derived as
These functions are alternative expressions of the above-derived Maxwell relations. Here the characteristic -form corresponds to the Gibbs free energy of the system, given as
Example 2
(Hamiltonian formalism of mass points)
Next let us consider the well-known Hamiltonian formalism of mass points with degrees of freedom. The order parameter and space-time manifold are defined as and , respectively. The characteristic function is
where and . Assuming the Hamiltonian as , the characteristic forms are obtained as
Then, the celebrated canonical equations of motion can be expressed as the following characteristic functions:
Underlying structure of Hamiltonian systems
The similarity between thermodynamics and the Hamiltonian formalism of mass points was highlighted in the previous section. Both systems show the same symplectic structure of base manifold and evolve along an order parameter under a set of “equations of motion”. However, thermodynamic ideal gas systems are known to possess an underlying structure generated by the statistical mechanics of independent gas molecules. On the other hand, the Hamiltonian formalism of mass points requires no underlying structure. Here we treat the Hamiltonian formalism as a thermodynamic system and assume a virtual underlying structure for the motions of mass points. Among several candidates for a microscopic entity governing the Hamiltonian formalism, particle trajectories are adopted for the following reasons. The Hamiltonian formalism of mass points differs from ideal-gas thermodynamics primarily by importance of the trajectory. The main goal of the former is to determine the trajectory of a mass point under applied forces and initial conditions. In contrast, in the latter, the trajectory cannot be measured and has no essential meaning, similar to the quantum mechanics of mass points. By considering particle trajectories as the statistical entity, a relation between classical and quantum mechanics may be clarified. This section considers the statistical mechanics of particle trajectories in the general dynamic space of Definition 2.1.
Geometrical preparation
This subsection introduces the geometrical objects used in subsequent discussions.
Definition 3.1
(Curvilinear path) A set of maps such that
is called a curvilinear path (or simply “path”), and a set of paths, , is called a curvilinear-path space.
In this section, we consider only those paths whose end points are fixed at and .
Definition 3.2
(Velocity vector) A velocity vector is a tangent vector at a point on the curvilinear path, defined as
Hereafter, the velocity vector is written as . The velocity vector can be expressed in terms of natural bases on a tangent space at as
where runs from to and the components are not summed. A tangent vector bundle is called a velocity bundle.
Definition 3.3
(Variational vector) A variational vector is defined as a cotangent vector at on the curvilinear path . In terms of natural bases of the cotangent space , variational vectors can be expressed as , where runs from to and the components are not summed. The zeroth component is . A cotangent vector bundle is called a variational bundle.
The bases of a velocity bundle and variational bundle are orthogonal, i.e., .
Definition 3.4
(Variational operator) A map induced by a variational vector such that
is called a variational operator.
Here denotes the sum of two vectors and , which are defined on . The curvilinear path is assumed to become an element of the curvilinear-path space, i.e., . The distance between two paths and is defined as
Suppose that is a functional defined on such that . The variational operator maps a functional to another functional as Since is a map defined in Definition 3.1, a functional can be pulled back to a function defined on using a pull of , which denoted as :
For simplicity, we use a shorthand, . A variational operator can be pulled as Thus variation of a functional can be defined as
When a variation is zero with some , it is said that the functional has a extremal at .
Dynamics of paths
We now define the general dynamic space occupied by a mass point and impose a probability space on it. For simplicity, we treat a single mass point.
Definition 3.5
(General dynamic path space) The general dynamical space occupied by a point particle is described as follows:
-
Space Manifold: The space manifold is a three-dimensional Euclidean space
-
Time Manifold: The time manifold is Newtonian absolute time, which is commonly used in inertial system analysis. A space-time manifold is called a Galilean Manifold.
-
Characteristic Function: The characteristic function (functional) is defined as
where is a path defined on , and is a vector defined on the velocity bundle. The mass is defined as . The characteristic function can be considered as a functional of the path defined on .
-
Characteristic Forms: The characteristic 1- and 2-forms, respectively, are defined as
and
Here the characteristic functional is assumed to be invariant under affine transformation on the space manifold,Footnote 4. In this notation, the action and Lagrangian, respectively, are expressed as
and
This transformation from the Hamiltonian to Lagrangian is known as a Legendre transformation and the independent variables of are now . Here the flat Riemannian metric correctly induces a Legendre transformation from to .
From the geometrical framework introduced in the previous subsection, we now construct a dynamical path system of a mass point evolving under the Hamiltonian formulation.
Theorem 3.1
(Hamilton) In a general dynamical space, the following two trajectories are equivalent:
-
1.
Trajectory that gives the extremal of variation of the action: ,
-
2.
Trajectory that satisfies the characteristic equations:
Proof
: Applying a variational operator to the action, we obtain
implying that the integration of the characteristic 1-form is independent of and satisfies Principle 1. Then, the Hamiltonian must satisfy the characteristic equations.
: Applying the variational operator to the Lagrangian, we obtain
where . Here we use integration by parts and assume zero variations at both ends of the path. Steps 2 and 3 in the derivation are obtained by substituting the characteristic equations.
The variation of the action, on the other hand, can be written as , which yields . This is analogous to the extremal of the Gibbs free energy in an isothermal reversible system at equilibrium. Let us consider this analogy in more detail. As pointed out, when introducing Eq. (11), the characteristic 1-form of the isothermal reversible transition is equivalent to the Gibbs free energy. In this analogy, the Hamiltonian corresponds to the entropy of the system and the macroscopic system configuration may be determined by the extremal point of the characteristic 1-form, which corresponds to the Lagrangian. The analogies between the Hamiltonian formalism of mass points and thermodynamics of ideal gases is summarized in Table 1. This analogy will be pursued further in the next subsection.
Statistical mechanics of trajectories
The curvilinear path defined in the previous subsection is the trajectory of the particle. This trajectory is considered as the microscopic basis for constructing a statistical mechanical analog of the thermodynamic system.
Definition 3.6
(Lagrangian probabilistic space) The probabilistic space is imposed on the general dynamic path space (see Definition 3.5) as follows:
-
1.
Whole event: The set of whole events is the curvilinear-path space.
-
2.
-Algebra: The -algebra is a power set of , denoted .
-
3.
Probability measure: Consider a map such that
This functional describes the probability density to realize the path . Please note that we consider only those paths whose start and end points are fixed at and , respectively. The initial momentum vector must be chosen to realize a classical path. The probabilistic space is assumed to satisfy the probability axioms proposed by Kolmogorov [8]. If a set with infinite degrees of freedom belongs to , then a set must belong to . Since we cannot mathematically justify the probability measure defined on such an infinite set, we present a formal treatment only. The existence of the measure can be verified in limited cases, as will be discussed later.
Definition 3.7
(Entropy of Paths) The entropy of the paths is defined as
according to Shannon [13]. Here , and are defined in the Definition 3.6.
Consistency between the above definition of entropy and Hamiltonian formalism will be discussed later. At this stage, we lack detailed knowledge of the dynamics that govern path behavior. However, it seems natural to configure paths by the following principle.
Principle 2
(Maximum entropy principle) Path configuration is determined to maximize the entropy of the paths.
According to above principle, a probability to observe a path can be given by following theorem.
Theorem 3.2
(Canonical ensemble) The probability defined as following two requirement are equivalent:
-
1.
The path whose entropy is maximized under the following constraints
(13)(14)The first constraint is conservation of probability. The second stipulates that an action averaged over all possible paths , called a classical action, must exist.
-
2.
The path whose probability is given as
(15)(16)where is a constant to eliminate a dimension in the argument of exponential function.
Here, the functional integration is regarded as a partition functional by analogy with equilibrium statistical mechanics. Then, particle trajectories (paths) form a canonical ensemble.
Proof
To maximize the entropy of the constrained paths, we introduce Lagrange multipliers and such that
The following conditions must be satisfied:
Here we used the functional derivative rules presented in the Appendix. Solving the above equations gives
To ensure that converges when , must be positive.
The above theorem implies that introducing the entropy of paths described by Eq. 12 yields the canonical ensemble of equilibrium statistical mechanics. Therefore, it appears that the classical trajectory of a mass point can be interpreted as the equilibrium state among all possible paths. The following theorem should then naturally hold:
Theorem 3.3
(The most probable path) The following two trajectories are equivalent:
-
1.
Trajectory that gives the extremal of variation of the action: ,
-
2.
Trajectory that gives the maximum probability in Eq. (15).
Proof
Applying the variational operator to both sides of Eq. (15), we obtain
Thus, and are equivalent. Since , , and are positive, the path that minimizes gives the maximum .
Above theorem posits that the classical trajectory described in Theorem 3.1 is the most probable path of a mass point under Principle 2. Thus, we have proved that the maximum entropy principle (Principle 2) and Cartan principle (Principle 1) are mathematically equivalent in a general dynamic space.
Classical mechanics to quantum mechanics
This section relates the formulations of classical and quantum mechanics. Quantum and classical mechanics differ most distinctly by the probability amplitude, whose square gives probability density. Quantum mechanical motions, embodied in the Heisenberg/Schrödinger equation, are governed by the time evolution of probability amplitudes rather than probability densities. Importance of the quantum probability amplitude is discussed elsewhere [10]. The following subsection introduces a general framework of quantum mechanics, within which we relate our formulation to path integrals and stochastic quantization.
General quantum system
Here we develop a general framework for defining quantum mechanical probability amplitudes.
Definition 4.1
(Quantum amplitudeFootnote 5and Probability)
Let be any field, not necessarily commutative, and let be a linear (vector) space on it. The base field is associated with each element of . The probability amplitude and probability measure are introduced on these spaces as follows:
-
1.
We introduce the following map from the path to an n-dimensional vector space:
where the paths have fixed end points at and (see Definition 3.1). The amplitude is then defined as
In defining a measure on the vector space, a -algebra of the probability amplitudes in the base field is assumed. Hereafter, the simplified notation denotes that the start and end points are fixed at and , respectively, unless otherwise stated.
-
2.
The following map from an amplitude to a real number
is called a quantum probability (measure). The sequential map
is also called a quantum probability and is represented by the same symbol , where and are as previously defined. The quantum probability measure must satisfy This measure is not normalized to unity because the curvilinear-path space includes only paths with fixed end points; however, the quantum mechanical uncertainty relation precludes precise determination of an end point.
Two essential differences exist between the above-described general quantum system and canonical ensemble introduced earlier:
-
1.
Relaxation of the first constraint in Theorem 3.2.1.
-
2.
The probability amplitude is not necessarily a real number.
These differences may lead the dynamical system to adopt quantum mechanical instead of classical behavior.
Path integral quantization
Here we derive the probability measure and amplitude from the maximum entropy principle (Principle 2). The probability that a mass point observed at is later observed at is
where the quantum probability amplitude resides in a one-dimensional vector space on a complex number field . Hereafter, is written as for simplicity.
Theorem 4.1
(Path integral quantization) The quantum probability amplitude and probability measure that minimize the entropy
under constraints
is given by
where is an appropriate normalization constant and is rendered dimensionless by dividing by the constant .
Proof
The probability amplitude that maximizes the entropy is again obtained by the Lagrange multiplier method:
Here we again used rules of a functional derivative described in Appendix. Solving the above equations, the probability amplitude is obtained as
Here and () are real-part (imaginary) of , respectively. An imaginary part of is arbitrary due to an symmetry of . As shown in the Theorem 3.3, a main contribution for the probability comes from the trajectory of the classical mass point. Moreover it is expected that a quantum mechanical path is small fluctuated around this classical trajectory. Thus here we assume that a real-part of contributes to as slow moving function and replace it by a mean value. Then the probability amplitude can be express as
where and
Equations (21) and (17) are nothing but the path-integral representation of transition probability introduced by Feynman [3, 4].Footnote 6 The constant is not necessarily the Planck’s constant and cannot be determined within this formulation. Instead, a transition from classical to quantum mechanics arises through the probability amplitude, which can be a complex valued functional in our interpretation, in contrast to the real probability density of classical mechanics. This transition becomes evident if Eqs. (12) and (14) are compared with Eqs. (18) and (19).
Conclusions and discussions
In this report, we introduced a general dynamic space that allows a unified geometric viewpoint of various dynamic systems. System dynamics were geometrically introduced though Cartan’s principle. The equations of motion derived from Cartan’s principle were found to be mathematically equivalent to Hamiltonian dynamics. Under the proposed generalized framework, the dynamics of a mass point were equivalent to those of equilibrium thermodynamics, enabling the derivation of a thermodynamic analogue of mass point dynamics. In fact, the maximum entropy principle defined in trajectory space generated precisely the Hamiltonian equation of motion. The classical trajectory of a mass point can be interpreted as the most probable path of the point. By extending the maximum entropy principle to probability amplitude rather than probability density, we retrieved the equations of path-integrated quantum mechanics. The probability amplitude was essential for transferring the system from a classical to quantum state. In summary, we incorporated various dynamical systems such as classical mechanics of a mass point and equilibrium thermodynamics and quantum mechanics of a point particle into a general mathematical framework.
While this framework provides a unique vantage point for both classical and quantum mechanics, it is not yet suitable for quantum mechanical analysis. We defined quantum amplitudes on a curvilinear space of precisely fixed end points. A basic quantum mechanical element is not naturally located in such a space-time manifold because of violation of the uncertainty relation. To satisfy the uncertainty relation, the essential element of quantum mechanics must be defined on a measurable space. A suitable candidate manifold is the Cartan tube introduced in Sect. 2.1, which is defined in a measurable extended phase space. The elements of this space, space-time and momentum manifolds comprise a Fourier-dual pair [9]. Thus, we can expect to construct quantum mechanics that satisfy the uncertainty condition on the Cartan tube. Moreover this formalism is suitable to treat quantum field theory, which is considered as a more fundamental theory than quantum mechanics of a mass point. A detailed analysis of this subject is beyond the scope of this report and will be reported elsewhere.
Notes
See for example [5].
These examples are given in [14]. Other examples are provided therein.
For a statistical physics treatment, see for example [11].
If the characteristic functional is assumed to be invariant under affine transformation on the entire space-time manifold, then the manifold is called a Minkowski manifold and the system is called relativistic.
In a narrow sense,“quantum amplitude” is a complex number whose square of the absolute value is a probability (density). In this report, we use a word “quantum amplitude” not only for complex numbers, but also for vectors whose square of the absolute value is a probability (density).
See also a section 1.3 of [7].
References
Arnol’d, V.I., Vogtmann, K., Weinstein, A.: Mathematical methods of classical mechanics. Graduate Texts in Mathematics. Springer, Berlin (1989)
Cartan, E.: Leçons sur les invariants intégraux (1922)
Feynman, R.P., Brown, L.M.: Feynman’s thesis: a new approach to quantum theory. World Scientific Publishing Company, Singapore (1942)
Feynman, R.P., Hibbs, A.R.: Quantum mechanics and path integrals. International Series in Pure and Applied Physics. McGraw-Hill, New York (1965)
Flanders, H.: Differential forms with applications to the physical sciences. Dover Books on Mathematics. Dover Publications, New York (1963)
Gemmer, M., Michel, J., Mahler, G.: Quantum thermodynamics : emergence of thermodynamic behavior within composite quantum systems, 2nd edn. Springer, Berlin (2009)
Kaku, M.: Introduction to superstrings and M-Theory. Graduate Texts in Contemporary Physics. Springer, New York (1999)
Kolmogorov, A.N.: Fundation of probability theory. Moscow-Leningrad (1936) (in Russian)
Kurihara, Y.: Classical information theoretic view of physical measurements and generalized uncertainty relations. J. Theor. Appl. Phys. 7(1), 28 (2013)
Kurihara, Y., Quach, N.M.U.: Advantages of the probability amplitude over the probability density in quantum mechanics. ArXiv e-prints (2013)
Landau, L.D., Lifshitz, E.M., Pitaevskii, L.P.: Statistical physics: theory of the condensed state. Course of Theoretical Physics. Butterworth-Heinemann, UK (1980)
Lieb, E.H., Yngvason, J.: The physics and mathematics of the second law of thermodynamics. Phys. Rep. 310(1), 1–96 (1999)
Shannon, C.E.: A mathematical theory of communication. Bell Syst. Tech. J. 27(379–423), 623–656 (1948)
Story, T.L.: Dynamics on differential one-forms. iUniverse (2002)
Yamamoto, Y., Nakamura, K.: Analytical Mechanics 1. Asakura Publishing Co. Ltd., Tokyo (1998). (in Japanese)
Acknowledgments
We wish to thank Dr. Y. Sugiyama, Profs. T. Kon and J. Fujimoto for their continuous encouragement and fruitful discussions. The authors would like to thank Enago (www.enago.jp) for the English language review.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix: Algebraic functional calculus
The functional differential and integral calculus used in this report is not directly extendable to an infinite dimensional space. However, an algebraic treatment of the functional derivatives required in this report is sufficient.
Algebraic differentiation
Definition 6.1
(Algebraic differentiation(1-parameter) Algebraic differentiation is a map from the vector, defined on an open neighborhood about the point on manifold , to a complex number. The map must satisfy three algebraic conditions:
-
Unity: ,
-
Linearity: ,
-
Leibniz’s rule: ,
where is a local coordinate on , , and .
A differential operator acting on local coordinates on is written as
Example 3
(Constant functions) Given that
and that the derivative of the constant function is zero, it immediately follows that the derivative of any constant function is zero.
Example 4
(Polynomials) The derivative of is
Then, by mathematical induction on , for any .
Example 5
(Power function) The derivative of is
Then, by mathematical induction on , for any .
Example 6
(Exponential function) An exponential function is defined as an identity function of the differentiation operator. It is lower-bounded by such that
On the other hand, the infinite series
satisfies the same differential equation and boundary condition. Thus, is equivalent to and both are hereafter expressed as .
Example 7
(Logarithmic function) The logarithmic function is the inverse of the exponential function, such that Differentiating the right-hand side of the formula, we get
On the other hand, differentiating the left-hand side yields Equating these, we obtain
Integration: inverse operation of differentiate
Definition 7.1
(Primitive function) A function satisfying
is called a primitive function. A map homologizing a function to a primitive function , i.e.,
is called an integration.
An operator maps a function to its primitive function.
Definition 7.2
(Definite integral) The map
is called a definite integral.
Leibniz’s rule gives rise to the following theorem:
Theorem 7.1
(Integration by parts)
where is a primitive function of .
Example 8
As an example, we integrate the function by parts. For , we have
Performing the definite integration, we obtain
Here convergence of the limit can be confirmed by expressing as an infinite series.
Example 9
(Dirac function) The Heaviside unit function is defined as
The Dirac delta function is formally defined as For any function , we have
where we have used integration by parts.
Functional calculus
In this report, differential calculus is applied on functionals. The calculus is treated algebraically and the operations are not checked for convergence.
Definition 7.3
(Algebraic functional calculus) A functional differential is a linear operation that satisfies Leibniz’s rule and
Elementary functionals and their functional derivatives are defined and calculated following the methods of Appendix A.1.
Example 10
(Exponential functional) An exponential functional is an identity function of the differential operator. It is bounded by , where . The exponential functional is therefore equivalent to
From the definitions of functional calculus, we obtain
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
Kurihara, Y., Phan, K.H. & Quach, N.M.U. Thermodynamics for trajectories of a mass point. J Theor Appl Phys 8, 135–146 (2014). https://doi.org/10.1007/s40094-014-0143-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40094-014-0143-7