
Abstract
This paper presents the contact elements for dynamic analysis of Euler–Bernoulli beams to a moving oscillator on tensionless elastic foundation considering discontinuous contact. The elastic foundation is modeled by linear elastic springs accounting for discontinuous contact between the beam and foundation. Three types of contact element including a full-bonded element, full-unbonded element and half-bonded element in finite element method expressing the relation displacement between the beam and foundation are suggested in this paper. The contact force of the beam and foundation during vibration as external force of the beam is established by the elastic foundation’s reaction distributed per length of the element. The governing equations of motion are derived by means of finite element method and solved by Newmark’s time integration procedure in the time domain. The effects of the discontinuous contact phenomenon due to tensionless foundation on dynamic responses of the beam are discussed. The comparisons between present solution and ordinary solution with continuous contact show that the dynamic responses of the beam are quite different and increasing than those of the ordinary solution.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The contents of the overwhelming majority of publications on the dynamic response of beams resting on various elastic foundation types are based on the assumption that there is a continuous contact between beam and subgrade. The foundation model is considered as a continuous distribution of linear elastic springs, whose constraint reaction per unit length is at each point of the foundation directly proportional to the deflection of the foundation itself, regardless of its sign. Because of the above assumption, it can be seen that the foundation model is very simple, hence it has been applied so much in behavior analysis models of structure resting on the foundation and a few studies using this foundation model were carried out by Lee (1998), Huang and Thambiratnam (2001), Seong-Min and Frank (2003), Nguyen and Le (2011), Nguyen et al. (2012) and Mohanty et al. (2012). However, for real applications, the soil can only react when in pressure from the beam, which may be caused by either the action of a transverse load along the span or by the beam itself due to force vibration, i.e., and thus it has attracted many researchers.
In the many last few decades, many relevant studies related to the structure on foundation model considering discontinuous contact have been published, each tackling the problem via different approaches. In an earlier work, Conway and Farnham (1970) have investigated the problem of a beam of finite length which rests on a continuous elastic foundation under a concentrated load. In this study, two conditions are considered—in one case the beam is bonded to the elastic foundation while in the second case the beam is not bonded to the elastic foundation. The results obtained for the unbonded case are independent of the length of the beam and the contact length is independent of the load on the beam and is a function only of the relative stiffness of beam and foundation. Jin and Byung (1986) have studied a numerical procedure for the analysis of the elasto-plastic contact problem under large strain. A variational formulation equivalent to these equations transformed into a recursive quadratic programming problem by finite element method is used to overcome the difficulties in solving simultaneously the nonlinear governing equations and geometric contact condition. Continuous and discontinuous contact problems for strips on an elastic semi-infinite plane are investigated via Fourier transformations and the use of Navier equations by Osman and Fenzli (1991). In this study, the formulation is derived initially from general loading conditions and the continuous contact problem between the strip and the half plane is examined and integration procedure is performed numerically until initial separation between the strip and the elastic plane. Silva et al. (2001) have presented a numerical methodology for analysis of plates resting on tensionless elastic foundations using finite element method to discretize the plate and foundation. The elastic foundation is described either by the Winkler model or as an elastic half-space and the contact surface is assumed unbonded and frictionless. To overcome the difficulties in solving the plate-foundation equilibrium equations, a variational formulation equivalent to these equations is presented from which three alternative linear complementary problems are derived and solved by Lemke’s complementary pivoting algorithm to obtain no-contact regions where the plate lifts up away from the foundation and the subgrade reaction. An analytical model is developed for the static response of a beam resting on a tensionless elastic foundation subjected to a lateral point load by Zhang and Murphy (2004). An analytical and numerical solution with no assumption about either the contact area or the kinematics associated with the transverse deflection of the beam is obtained by the governing equations. Because these assumptions are dropped, the contact area is a sensitive function of the beam length and might depend on the magnitude of the load, and asymmetric loads have a dramatic influence on the contact area for the finite system. The dual mixed finite element approximation of unilateral contact problems has been studied by Wang and Yang (2009), a priori error estimates have been established for both conforming and nonconforming finite element approximations based on the dual mixed variational formulation with three unknowns, and a Uzawa type iterative algorithm was developed to solve the resulting linear system.
Recently, the tensionless contact problem of an Euler–Bernoulli beam of finite length resting on a tensionless Pasternak is investigated by Andrea and Luca (2011). The unilateral nature of the beam–soil contact gives the problem a nonlinear feature and the contact region behavior was investigated under the action of a concentrated force located at midspan and a concentrated couple at either of the beam ends in three contact scenarios. Bhattiprolu et al. (2011) have studied the static and dynamic responses of a beam on a nonlinear tensionless viscoelastic foundation subjected to concentrated static and harmonic loads. The modal amplitude equations also involve co-ordinates of unknown “lift-off points” determined as a part of the solution for structural response through the constraints imposed on the solution derived by the Galerkin method using linear modal bases. Celep et al. (2011) have presented the static and dynamic responses of a completely free elastic beam resting on a two-parameter tensionless Pasternak foundation subjected to a concentrated force at the middle and a uniformly distributed load. Governing equations of the problem are obtained and solved by paying attention to the boundary conditions of the problem in the case of complete contact and lift-off condition of the beam in a two-parameter foundation and the nonlinear governing equation of the problem is evaluated numerically by adopting an iterative procedure. Ma et al. (2009) analyzes the static response of an infinite beam supported on a tensionless two-parameter Pasternak foundation with the transfer displacement function method and the lift-off points employed to determine the initially unknown lengths. Sapountzakis and Kampitsis (2010) used the boundary element method for the nonlinear dynamic behavior of beam supported on tensionless Winkler foundation. Zhang and Murphy (2012) have studied a general formulation developed for the contact behavior of a finite circular plate with a tensionless elastic foundation. The gap distance between the plate and elastic foundation incorporated as an important parameter is reduced to zero when the plate radius becomes large enough and the contact area varies with the plate radius, boundary conditions and gap distance. Contact problem for an elastic layer on an elastic half plane loaded by means of three rigid flat punches is studied by Ozsahin and Taskiner (2013). In this study, the frictionless contact problem for an elastic layer resting on an elastic half plane is solved by the theory of elasticity and integral transformation technique, and different parameters are researched for various dimensionless quantities for both continuous and discontinuous contact cases. Konstantinos and Dimitrios (2013) have presented the buckling of axially compressed beams resting on elastic foundation considering discontinuous (unbonded) contact between beam and subgrade. A two-region contact/non-contact configuration is revealed using Galerkin’s method as the only possible post-buckling deformation for both pinned–pinned and fixed–fixed boundary conditions.
From these literatures, the problem of the dynamic analysis of beams subjected to a moving load on tensionless elastic foundation considering discontinuous contact by finite element method has limitation, and thus, this paper presents the contact element of beams to consider unbonded contact phenomenon between beam and foundation in this problem. Based on two contact conditions of the tensionless elastic foundation (bonded and unbonded to the tensionless elastic foundation) and number of lift-off points, three element types are suggested in this study including the full-bonded, full-unbonded and half-bonded element. This contact element uses to analyze dynamic responses of the beams under moving loads on tensionless elastic foundation considering discontinuous.
The organization of the paper is as follows. The next section describes the definition problem of the dynamic analysis of beams to a moving oscillator on tensionless elastic foundation and the governing equations of motion are also derived in this section. The contact element of beams consisting of the first beam element type “full-bonded” contact, the second beam element type “full-unbonded” contact and the third beam element type “half-bonded” contact to the elastic foundation is presented in “Contact element” to determine the contact force of the beam and foundation. Numerical validations are given in detail in “Numerical results” including the verified example compared with the results in the literature and dynamic responses of the beam numerically investigated. Finally, some concluding remarks are also presented.
Definition problem
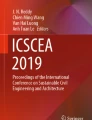
A beam having the length \(L\), width \(b\), thickness \(h\), Young’s modulus \(E\) and mass density \(\rho\) with coordinate system \(Oxz\) is shown in Fig. 1. The beam resting on tensionless elastic foundation considering discontinuous contact is subjected to a moving oscillator which moves in the axial direction of the beam with constant velocity \(v\).

The beam subjected to a moving oscillator on elastic foundation considering discontinuous contact
Based on Euler–Bernoulli beam theory, the two-node beam element with two degrees of freedom per node including vertical displacements and rotations in global axes shown in Fig. 2 is considered. By means of finite element method, the dynamic displacement function \(u_{i} \left( {\xi ,t} \right)\) of the \(i{\text{th}}\) element expressed in terms of the nodal displacement vector \(\left\{ {{\mathbf{u}}_{e,i} \left( t \right)} \right\}^{T} = \left[ {\begin{array}{*{20}c} {u_{e,2i - 1} } & {u_{e,2i} } & {u_{e,2i + 1} } & {u_{e,2i + 2} } \\ \end{array} } \right]\) in each time step is given by
where \(\left[ {\mathbf{N}} \right] = \left[ {N_{i} } \right]\,(i = 1, \ldots, 4)\) are the cubic spatial shape functions, (third-order polynomial in the beam element) in local coordinate \(\xi\) in finite element method.

The two-node beam element resting on elastic foundation
The moving oscillator model is regarded as a two-node system one of which is associated with each of two concentrated masses shown in Fig. 2. The stiffness and damping coefficients of the oscillator are denoted by \(k_{\text{v}}\) and \(c_{\text{v}}\), respectively, the mass of the bottom part by \(m_{\text{w}}\) and the mass of the upper part by \(M_{\text{v}}\). In addition, \(z_{\text{v}}\) and \(z_{\text{w}}\) denote the vertical displacements of two nodes measured from the static equilibrium position. By assuming the no-jump condition for the oscillator, the contact force can be related to displacement and its derivatives. Equations of motion of the oscillator can be written as follows:
where \(f_{\text{c}}\) is contact force between the beam and oscillator given by
The dimensionless parameters of the oscillator used to analyze the dynamic response of the considered system are as follows (Mohebpour et al. 2011). The mass parameter \(\kappa\), defined as ratio of the total weight of the oscillator to the total weight of the beam \(M_{\text{b}}\) is
and the frequency parameter \(\gamma\), defined as ratio of the natural vibration frequency of the oscillator \(\omega_{\text{v}}\) to the first fundamental natural frequency of beam without elastic foundation \(\omega_{\text{b}}\) is to be
From Eq. (2), if the deflection \(z_{\text{w}}\) is expressed in terms of the nodal displacement vector \(\left\{ {{\mathbf{u}}_{e,i} \left( t \right)} \right\}\) by means of finite element method, the governing differential equation for the displacement of mass \(M_{\text{v}}\) can be expressed as
Considering \(m\) time steps and choosing a time interval \(\Delta t\), at any time \(t\), the position of the moving oscillator \(x_{m} = vt\) and the left end of the beam element in global coordinate (ith node) is \(x_{i} = {\text{Int}}\left[ {x_{m} /l} \right]l\). One can find the element number \(i{\text{th}}\), nodes \(i{\text{th}}\) and \(i + 1{\text{th}}\), which the moving oscillator is applied to at any time \(t\), as \(i{\text{th}} = {\text{Int}}\left[ {\frac{{x_{m} }}{l}} \right] + 1\). Therefore, \(\xi (t)\) can be rewritten in terms of the global instead of the local \(\xi (t) = x_{m} - i{\text{th}}l\) and the value of matrix shape function \(\left[ {{\mathbf{N}}\left( \xi \right)} \right]\) is time dependent as the oscillator moves from one position to another. The system equation for the dynamic response of the beam resting on tensionless elastic foundation subjected to a moving oscillator and without material damping of the beam is given by
Substituting Eq. (3) in Eq. (7) and rearrangement of this equation gives
Combining Eqs. (6) and (8) gives the governing equation of motion as
where \(\left[ {{\mathbf{K}}_{e}^{b} } \right]\) and \(\left[ {{\mathbf{M}}_{e}^{b} } \right]\) are stiffness and mass matrix of the two-node beam element in the finite element method, respectively. From Eqs. (7) to (9), \(\left\{ {{\mathbf{F}}_{e,i}^{f} \left( t \right)} \right\}\) is the contact force vector of the beam and foundation and concerned in the next section.
Contact element
This paper presents the contact element of beams to consider unbounded contact phenomenon between beam and foundation to determine the \(\left\{ {{\mathbf{F}}_{e,i}^{f} \left( t \right)} \right\}\). Due to tensionless elastic foundation, the contact force vector of the beam and foundation depends on the displacement of the beam at the moment. Substituting the value of matrix shape function \(\left[ {{\mathbf{N}}\left( \xi \right)} \right]\) into Eq. (1) and rearrangement of this equation, the dynamic displacement function of the beam element is given as follows:
It can be seen that the dynamic displacement of the beam during vibration always varies in each time step. Thus, the contact surface between beam and subgrade can occurs gap or opposite, which corresponds with two conditions of the contact. The gap appearing between the beam and subgrade is not bonded while in the opposite case the beam is bonded to the elastic foundation. Two-condition contact between the beam and elastic foundation can be expressed as follows: \(u_{i} \left( {\xi ,t} \right) > 0\)—unbonded case and \(u_{i} \left( {\xi ,t} \right) < 0\)—bonded case, and especially \(u_{i} \left( {\xi ,t} \right) = 0\) is lift-off point. It is clear from Eq. (10), the dynamic displacement function \(u_{i} \left( {\xi ,t} \right)\) is expressed by power-three polynomial in the local coordinate, and thus it is only able to have maximum three lift-off points on the length of the beam element solved from equation \(u_{i} \left( {\xi ,t} \right) = 0\). Based on two-condition contact and number of lift-off points, three beam element types which describe problem contact between the beam and tensionless elastic foundation are suggested in this paper as follows.
Full-bonded contact element
The full-bonded contact element is shown in Fig. 3. It expresses the entire surface of beam element and elastic foundation which are in contact at all times. Then, the dynamic displacement condition of the beam can be expressed as

Full-bonded contact beam element
The influence of elastic foundation on behavior of the beam is considered similar to the influence of external force in each time step which is a reaction of elastic foundation in compression region under action of a transverse load along the span or by the beam itself due to force vibration, i.e., the reaction of elastic foundation which is considered as a continuous distribution of linear elastic springs \(k_{\text{w}}\) whose constraint reaction per unit length is at each point of the foundation directly proportional to the deflection of the foundation itself can be expressed as
By means of finite element method, the external force vector of the beam element that caused the elastic foundation reaction is given by
Full-unbonded contact element
The second case, when the entire surface of the beam element and the elastic foundation have a gap occurring between the others, the beam element is full-unbonded contact with elastic foundation shown in Fig. 4. Then, the dynamic displacement condition of the beam element may be expressed as

Full-unbonded contact beam element
In this case, the entire surface of the beam element and the elastic foundation do not contact together and thus the elastic foundation is not affected by the behavior of the beam. Hence, the external force vector caused the elastic foundation reacting equals to zero
Half-bonded contact element
In contrast to the above two cases, the surface of the beam element and the elastic foundation have both bonded and unbonded contact regions between the others. The dynamic displacement condition of the beam element is
The elastic foundation’s reaction can be expressed as
where \(H\left( \xi \right)\) is an auxiliary contact function defined as \(H\left( \xi \right) = 0\), \(u_{i} \left( {\xi ,t} \right) \ge 0\) and \(H\left( \xi \right) = 1\), \(u_{i} \left( {\xi ,t} \right) < 0\).
The number of contact regions between the beam element and the elastic foundation depends on the number of lift-off points and the elastic foundation’s reaction is discontinuous during the length of the beam element shown in Fig. 5. To determine the external force vector of the beam element, this paper establishes a similar fixed–fixed beam model shown in Fig. 6 which is subjected to the reaction of the elastic foundation in contact region, that is replaced by a uniform distribute load \(q_{i} \left( \xi \right)\) as follows:

Half-bonded contact beam elements: a three, b two, c one lift-off point

The similar fixed–fixed beam model: a three, b two, c one lift-off point
In this model, the reactions at both ends of similar fixed–fixed beam are solved from the static balance equation based on finite element method and the external force vector of the beam element causing the elastic foundation reaction can be determined as
where \(\left[ {\begin{array}{*{20}c} {V_{1} } & {M_{1} } & {V_{2} } & {M_{2} } \\ \end{array} } \right]\) are the reaction at both ends which corresponds to degrees of freedom of the beam element in finite element method.
From Eqs. (13), (15) and (19), it can be seen that the contact force of the beam and foundation during vibration of the beam \(\left\{ {{\mathbf{F}}_{e,i}^{f} \left( t \right)} \right\}\) can be determined by the three types of contact beam element. From that, the governing equation of motion of entire system Eq. (9) is rewritten as
where \(\left[ {\mathbf{M}} \right]\), \(\left[ {\mathbf{C}} \right]\) and \(\left[ {\mathbf{K}} \right]\) are the mass, damping and stiffness matrices of the whole system, respectively; \(\left\{ {{\ddot{\mathbf{{z}}}}} \right\}\), \(\left\{ {{\dot{\mathbf{z}}}} \right\}\), \(\left\{ {\mathbf{z}} \right\}\) are the acceleration, velocity and displacement vectors for the whole system, respectively, while \(\left\{ {{\mathbf{P}}\text{(t)}} \right\}\) is the external force vector. It can be seen that symbols \(\left[ {\mathbf{M}} \right]\), \(\left[ {\mathbf{C}} \right]\) and \(\left[ {\mathbf{K}} \right]\) in Eq. (20) are called instantaneous matrices because they are time-dependent matrices due to the position of the moving oscillator. From Eq. (20), the dynamic response of the beam on tensionless elastic foundation considering discontinuous contact subjected to a moving oscillator can be studied. The direct step-by-step integration method based on Newmark’s algorithm is used in the solution of Eq. (20) by the computer program written by MATLAB language.
Numerical results
Verified examples
Before studying numerical results, to establish the accuracy of the above formulation and the computer program using MATLAB developed, results obtained from the present study are compared with the results in the literature.
As a first example, the dynamic characters of a simply supported beam without foundation under a moving oscillator are investigated and compared with the results of Neves et al. (2012). Figure 7 presents dynamic displacement at the center of the beam and vertical displacement of oscillator is plotted in Fig. 8. The comparisons show that the present dynamic displacement at the center of the beam and vertical displacement of oscillator are in good agreement with the results of Neves et al. (2012).

Dynamic displacement of the center of the beam

Vertical displacement of oscillator
The next example investigates the dynamic characteristics of a beam on the elastic foundation considering discontinuous (unbonded) contact subjected to a moving load \(P = 10^{5} \,{\text{N}}\) with a constant velocity \(v = 50\,{\text{m/s}}\), the following material and geometric properties are adopted: \(L = 10{\text{ m}}\), \(h = 0.1{\text{ m}}\), \(E = 206 \times 10^{ 9} \;{\text{N/m}}^{ 2}\), \(\rho = 7860{\text{ kg/m}}^{ 3}\) and \(k_{\text{w}} = 5 \times 10^{5} \,{\text{N/m}}^{ 2}\). The dynamic displacements determined from the above formulation of this paper are compared with solution of Nguyen and Le (2011) considering continuous contact. Figure 9 shows time histories for dynamic displacement at the midpoint and for different positions \(x = 2.5\,{\text{m}}\) and \(x = 7.5\,{\text{m}}\). The results of the dynamic displacement show that all of the almost positions of the beam are contacted with an elastic foundation during time histories. Hence, the present dynamic displacements are similar to the results of Nguyen and Le (2011) shown in Fig. 9.

Dynamic displacement of the beam on elastic foundation subjected to a constant speed point load: a at the center of the beam, b different positions: \(x = 2.5\,{\text{m}}\) and \(x = 7.5\,{\text{m}}\)
Through above examples the numerical results from the program based on the suggested formulation show good agreement with numerical results in the literature. Therefore, the program used to analyze the dynamic response of the beam subjected to a moving oscillator on tensionless elastic foundation considering discontinuous contact is reliable.
Dynamic responses of beam
In this section, the dynamic responses of the beam are investigated. The simple support beam parameters are given by: \(L = 2{\text{ m}}\), \(E = 206 \times 10^{ 9} \;{\text{N/m}}^{ 2}\), \(\rho = 7860\;{\text{kg/m}}^{ 3}\) and dimensionless parameter of elastic foundation stiffness \(K_{0} = k_{\text{w}} L^{4} /{\text{EI}}\), and using 20 beam elements in finite method. The influences of parameters on dynamic response of the beam determined from above formulation considering discontinuous contact (DC) are compared with ordinary solution considering continuous contact (CC).
As the first investigation, the influence of elastic foundation stiffness on dynamic response of the beam under a moving oscillator is investigated. The dynamic displacements of the center point of the beam for various values of elastic foundation stiffness are presented in Fig. 10. It has a significant effect on the beam which decreases with an increase of values elastic foundation stiffness. But, the comparisons between two of the elastic foundation models show that it has a significant difference between the others and the elastic foundation considering the discontinuous contact model shows increased dynamic responses of the beam than ordinary elastic foundation model which is shown clearly by the increase of elastic foundation stiffness values.

Time histories for dynamic deflections of the center point of the beam with dimensionless parameters \(K_{0}\) (\(c_{v} = 0\), \(m_{w} = 0\), \(v = 25\) m/s, \(\kappa = 0.5\), \(\gamma = 0.5\)): a \(K_{0} = 10\), b \(K_{0} = 20\), c \(K_{0} = 30\), d \(K_{0} = 40\)
From Figs. 11 and 12, the comparisons show that it has a significant difference between the others and the elastic foundation considering the discontinuous contact model shows increased dynamic response of the beam than ordinary elastic foundation model. Figure 13 plots the influence of elastic foundation stiffness on dynamic magnification factors (DMF) which is defined as the ratio of maximum dynamic deflection to maximum static deflection (the maximum static deflection is solved from the beam on elastic foundation considering continuous contact model) at the center point of the beam; the comparisons show that the DMFs have a very significant difference between two the elastic foundation models for various elastic foundation stiffness parameters.

Time histories for dynamic deflections of the center point of the beam with mass parameters \(\kappa\) (\(c_{v} = 0\), \(m_{w} = 0\), \(v = 25\) m/s, \(K_{0} = 25\), \(\gamma = 0.5\)): a \(\kappa = 0.25\), b \(\kappa = 0.5\), c \(\kappa = 1\), d \(\kappa = 2\)

Time histories for dynamic deflections of the center point of the beam with frequency parameters \(\gamma\) (\(c_{v} = 0\), \(m_{w} = 0\), \(v = 25\) m/s, \(K_{0} = 35\), \(\kappa = 0.5\)): a \(\gamma = 0.25\), b \(\gamma = 0.5\), c \(\gamma = 1\), d \(\gamma = 2\)

Dynamic magnification factors for various dimensionless parameters \(K_{0}\) versus velocity (\(c_{v} = 0\), \(m_{w} = 0\), \(\kappa = 0.5\), \(\gamma = 0.5\)): a \(K_{0} = 10\), b \(K_{0} = 20\), c \(K_{0} = 30\), d \(K_{0} = 40\)
The last investigation, the influence of mass and frequency of the oscillator on the DMFs of the beam are shown in Figs. 14 and 15, respectively, which show that it has a very significant difference between two the elastic foundation models for various mass parameters and frequency parameters. For range of low velocity, the DMFs of the beam considering discontinuous contact model are compared with those obtained using the ordinary elastic foundation model showing the unexpectedly increasing of dynamic responses of the beam.

Dynamic magnification factors for various mass parameters \(\kappa\) versus velocity (\(c_{v} = 0\), \(m_{w} = 0\), \(\gamma = 0.5\), \(K_{0} = 25\)): a \(\kappa = 0.25\), b \(\kappa = 0.5\), c \(\kappa = 1\), d \(\kappa = 2\)

Dynamic magnification factors for various frequency parameters \(\gamma\) versus velocity (\(c_{v} = 0\), \(m_{w} = 0\), \(\kappa = 0.5\), \(K_{0} = 35\)): a \(\gamma = 0.25\), b \(\gamma = 0.5\), c \(\gamma = 1\), d \(\gamma = 2\)
Conclusions
The contact element for dynamic analysis of beams to a moving oscillator on tensionless elastic foundation considering discontinuous contact has been suggested in this paper. The definition problem consists of the beam, moving oscillator and tensionless elastic foundation has been employed by the finite element method. Due to status of the contact between each beam element and tensionless elastic foundation during vibration, three types of this element expressing the relative displacement of the beam and foundation are defined to determine the contact force as external load on beam based on finite element method in this formulation. The program for analyzing the problem considering discontinuous contact using MATLAB language has been built.
The effects of the discontinuous contact phenomenon due to tensionless elastic foundation on dynamic responses of the beam are discussed. The numerical results also verify that the velocity and dynamic properties of the moving oscillator, the stiffness of the foundation effect plays a very important role on the dynamic responses of the beam. The comparisons between present solution with discontinuous contact and ordinary solution with continuous contact in all cases employed show that the dynamic responses of the beam are quite different and unexpectedly increasing than those of the ordinary solution for range of low velocity.
References
Andrea N, Luca L (2011) On the contact problem of beams resting on tensionless two-parameter foundations. In: Proceedings of the XX AMIETA Congress, Bolognia, Italy, pp 12–15
Bhattiprolu U, Bajaj A, Davis P (2011) Response of a beam on anon-linear tensionless viscoelastic foundation. In: Proceedings of ENOC 2011 7th European nonlinear dynamics conference, Rome, Italy, pp 24–29
Celep Z, Güler K, Demir F (2011) Response of a completely free beam on a tensionless Pasternak foundation subjected to dynamic load. Struct Eng Mech 37(1):61–77
Conway HD, Farnham KA (1970) Bending of a finite beam in bonded and unbonded contact with an elastic foundation. Int J Mech Sci 12:997–1055
Huang MH, Thambiratnam DP (2001) Deflection response of plate on Winkler foundation to moving accelerated loads. J Eng Struct 23:1134–1141
Jin WJ, Byung MK (1986) Analysis and applications of elasto-plastic contact problems considering large deformation. Comput Struct 24(6):953–961
Konstantinos SP, Dimitrios SS (2013) Buckling of beams on elastic foundation considering discontinuous (unbonded) contact. Int J Mech Appl 3(1):4–12
Lee HP (1998) Dynamic response of a Timoshenko beam on a Winkler foundation subjected to a moving mass. Appl Acoust 55:203–215
Ma X, Butterworth JW, Clifton GC (2009) Static analysis of an infinite beam resting on a tensionless Pasternak foundation. Eur J Mech A Solids 28(4):697–703
Mohanty SC, Dash RR, Rout T (2012) Parametric instability of a functionally graded Timoshenko beam on Winkler’s elastic foundation. Nucl Eng Des 241:2698–2715
Mohebpour SR, Malekzadeh P, Ahmadzadeh AA (2011) Dynamic analysis of laminated composite plates subjected to a moving oscillator by FEM. Compos Struct 93:1574–1583
Neves GM, Azevedo AFM, Calçada R (2012) A direct method for analyzing the vertical vehicle–structure interaction. Eng Struct 34:414–420
Nguyen DK, Le TH (2011) Dynamic characteristics of elastically supported beam subjected to a compressive axial force and a moving load. Vietnam J Mech VAST 33(2):113–131
Nguyen TC, Nguyen TP, Do KQ (2012) Dynamic response of plate on viscous-elastic foundation to moving mass. In: Proceedings of the 9th National Conference on Mechanics
Osman AC, Fenzli LC (1991) Continuous and discontinuous contact problems for strips on an elastic semi-infinite plane. Int J Eng Sci 29(1):99–111
Ozsahin TS, Taskiner O (2013) Contact problem for an elastic layer on an elastic half plane loaded by means of three rigid flat punches. Math Probl Eng 2013:137427. doi:10.1155/2013/137427
Sapountzakis EJ, Kampitsis AE (2010) Nonlinear dynamic analysis of Timoshenko beam-columns partially supported on tensionless Winkler foundation. Comput Struct 88(21–22):1206–1219
Seong-Min K, Frank MB (2003) Dynamic response of plate on viscous Winkler foundation to moving loads of varying amplitude. J Eng Struct 25:1179–1188
Silva A, Silveira R, Gonclaves P (2001) Numerical methods for analysis of plates on tensionless elastic foundations. Int J Soilds Struct 38:2083–2100
Wang G, Yang X (2009) Numerical modeling of a dual variational inequality of unilateral contact problems using the mixed finite element method. Int J Numer Anal Model 6(1):161–176
Zhang Y, Murphy KD (2004) Response of a finite beam in contact with a tensionless foundation under symmetric and asymmetric loading. Int J Soilds Struct 41:6745–6758
Zhang Y, Murphy KD (2012) Tensionless contact of a finite circular plate. Acta Mech Sin 28(5):1374–1381
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Nguyen, T.P., Pham, D.T. A contact element for dynamic analysis of beams to a moving oscillator on tensionless elastic foundation. Int J Adv Struct Eng 8, 351–361 (2016). https://doi.org/10.1007/s40091-016-0135-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40091-016-0135-8