
Abstract
This article adopts a novel technique to numerical solution for fractional time-delay diffusion equation with variable-order derivative (VFDDEs). As a matter of fact, the variable-order fractional derivative (VFD) that has been used is in the Caputo sense. The first step of this technique is constructive on the construction of the solution using the shifted Legendre–Laguerre polynomials with unknown coefficients. The second step involves using a combination of the collocation method and the operational matrices (OMs) of the shifted Legendre–Laguerre polynomials, as well as the Newton–Cotes nodal points, to find the unknown coefficients. The final step focuses on solving the resulting algebraic equations by employing Newton’s iterative method. To illustrate and demonstrate the technique’s efficacy and applicability, two examples have been provided.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent decades, fractional calculus (FC) has played a significant role in science and engineering, and therefore, the scientists focused on its applications to model the real phenomena [2, 23, 24, 29]. The fractional derivative and integrals were recognized to be an efficient tool to describe the properties of complex dynamical processes more accurately than the standard integer derivative and integral [14, 17, 21, 27, 38]. Fractional partial differential equations (FPDEs) are a fascinating subject, because they are frequently used to explain a variety of phenomena in real-world situations, including signal processing control theory, fluid flow, potential theory, information theory, finance, and entropy [7, 9, 25, 32].
Samko in 1993 [29] introduces the VOFDEs. These fractional operators can be considered as a generalization of fractional operators of constant orders. Indeed, the variable-order FPDEs extend the fractional fixed-order PDEs and occur in problems in the areas of physics and engineering [11, 12, 26, 32, 34].
Many models of specific processes or dynamical systems in real-world problems exhibit neutral delay, which is always described using delay differential equations (DDEs) or time-delay systems [6, 18, 35]. Despite the fact that FPDEs have been considered by a few researchers [16, 22, 37] and the references therein, there has been no work done in the area of VFDPDEs to our knowledge. Therefore, this reason motivates us in this paper to propose a numerical technique to solve a class of VFDDEs using the collocation method and the OMs of the shifted Legendre–Laguerre polynomials.
A considerable advantage of the method is that the shifted Legendre–Laguerre polynomial coefficients of the solution are found very easily using computer programs. Also, according to the proposed model, the time of the occurrence of an event does not have fix domain. Therefore, for approximating the time functions in the problem, we apply the Laguerre polynomials, which defined in \([0,\infty ).\)
Finally, using a few terms of shifted Legendre–Laguerre functions, approximate solution converges to the exact solution.
2 Preliminaries
For the continuous function \(\delta :[0,\infty )\rightarrow (0,1)\) and \(m,\beta \in N\cup \{0\}.\) The variable-order fractional derivative and integration definitions, along with some of the fundamental definitions and properties, are introduced in this section and will be used throughout the paper [8, 11, 15, 31, 36].
Definition 2.1
The Riemann–Liouville variable-order fractional integral operator with order \(n-1<\delta ({\xi },{\tau })\le n,~ {\tau }>0\) of \(\nu ({\xi },{\tau })\) is defined as
where \(\tau > 0\) and \(\Gamma (.)\) is the Gamma function. According to the above definition, variable-order fractional integration satisfies the following property:
Definition 2.2
[13] The fractional derivative of \(\nu (\xi , \tau )\) in the Caputo experience is described as
for \(n-1<\delta (\xi ,\tau )\le n,~\tau >0,\) and \(n\in Z^{+}.\) It has the taking after valuable property
3 Function approximation
Consider the basis function \(\Phi _{\tilde{m}\tilde{n}}(\xi ,\tau )\) which is two variable function and important to deal with VFDPDEs, and can be expanded as
where \(\tilde{m}=0,1, \ldots ,\tilde{M},~~~\tilde{n}=0,1, \ldots ,\tilde{N}, G_{\tilde{m}}(\xi )\) is the shifted Legendre polynomials defined on the interval [0, 1] and \( \ell _{n}(\tau )\) is the shifted Laguerre polynomials defined on the interval \([0,\infty )\).
The shifted Legendre–Laguerre polynomials are \(\bot \) w.r.t the weight function \( \Xi (\xi ,\tau )=exp({-\tau })\) in the \(\Delta \), i.e., [3,4,5]
where \( \delta _{\tilde{m}i}\) and \(\delta _{\tilde{n}j}\) are the Kronecker functions. Any function \(\nu (\xi ,\tau )\in L_{2}(\Omega )\) and may be decomposed as
where
and
4 Pseudo-operational matrix of integer order integral of the shifted Legendre and Laguerre polynomials
The purpose of this section is to find the OMs of the integer order quintessential of SLPs and the (S\(\ell \)Ps), respectively, using Taylor polynomials (TPs) [1, 28, 30], which is described as follows:
The SLPs may be expressed by means of the TPs as
since
Then, by integrating \( G(\xi )\), the pseudo-operational matrix of the SLPs is obtained
where \(\vartheta _{1}=D_{1}\Lambda _{1}D_{1}^{-1}\) is the pseudo-operational matrix of the integer order integral of the SLPs and\(\Lambda _{1}\) is defined by [10, 20, 33]
Similarly
where
Also, with the aid of integrating \( \ell (\tau )\), we gain the operational matrix of integer integration of the (S\(\ell \)Ps) as
where \(\vartheta _{2}=D_{2}\Lambda _{2}D_{2}^{-1}\) is the pseudo-operational matrix of the integer order integral of the shifted (S\(\ell \)Ps) and \(\Lambda _{2}\) is given by
5 Pseudo-operational matrix of the variable-order fractional integral of the (S\(\ell \)Ps)
To obtain the operational matrix of the variable-order Riemann–Liouville fractional integration of order \(\delta (\xi ,\tau )>0\) of the vector \(\ell (\tau )\) defined in Eq. (3.5), we need to calculate first variable-order Riemann–Liouville fractional integral of the TPs which is written as
where
Also, we need to find
where
Lemma 5.1
Let \(\ell (\tau )\) be the (S\(\ell \)Ps) vector defined in (3.5) and \(q-1<\delta (\xi ,\tau )\le q \in Z^{+}\) The pseudo-operational matrix of variable-order fractional integration of the vector \(\ell (\tau )\) can be expressed as
where \(\Theta _{N}^{\delta (\xi ,\tau )}=D_{2}~\gamma _{N}^{\delta (\xi ,\tau )}~D_{2}^{-1}.\)
Proof
A direct application of the relations (4.2) and (5.1) is given as
\(\square \)
6 The approach
This section is devoted to finding the numerical solution of the following VFDPDEs:
subject to
and
So that, \(\nu (\xi ,\tau )\) is an unknown function, the known functions\(~\nu _{0}(\tau ), \nu _{1}(\tau )~,g_{0}(\xi ) ~and ~g_{1}(\xi )\) are given continuous functions. Also, \( q=max_{(\xi ,\tau )\in \Omega }\{\delta (\xi ,\tau )\}~ and~ q\in Z^{+}\).
For this problem, assume that the easiest order of spinoff with appreciate to \(\xi \) and\(~ \tau \) is 2. Therefore, we obtain the following approximate functions as:
where the unknown matrix U is defined as follows:
By integrating of the above equation with (6.4) with respect to \(~\tau \) and using the initial condition (6.3), we have
Integrating (6.5) with respect to \(\tau \) yields
where
and
Now, by integrating (6.6) with respect to \(\xi \), we get
and
where
and
Integrating (6.4) w.r.t. \( \xi \) and by the aid of the conditions (6.2) and (6.3) yields
It is remarkable that \(\frac{\partial ^{3}\nu (0,\tau )}{\partial \xi \partial \tau ^{2}}\) is unknown function, by integrating (6.11) from 0 to 1 with respect to \(\xi \), we get
where
and
Then
By integrating (6.13) for \(\tau \), we acquire to
6.1 The operational matrix of the delay term
In this subsection, the delay term \(\nu (\xi ,\tau -\kappa )\) will be approximated using the operational matrix of the Laguerre polynomials as follows:
consider [10]
where
and
To get \(P(\tau -k)\) by means of \(P(\tau )\), we must employ the next relation
where
Using Eqs. (6.15)–(6.17), we have
6.2 Computation of VFD of \(\nu (\xi ,\tau )\)
Here, we expand \(D^{\delta (\xi ,\tau )}_{\tau }, 0<\delta (\xi ,\tau )\le 1\) in terms of the (S\(\ell \)Ps), using Eq. (6.14), we get
So that
since
Also, for \(1<\delta (\xi ,\tau )\le 2\)
Substituting the approximations (6.6), (6.9) and (6.20) into Eq. (6.1) and the nodal points of Newton–Cotes [19], then we get an algebraic system of equations and using the Newton’s iterative method. We get the unknown matrix U.
Substituting U into Eq. (6.9), we attain the approximate solution of the problem (6.1)–(6.3).
7 Numerical examples
To demonstrate the ability of the proposed method for solving VFDDEs, two tested examples are given:
Example 7.1
Consider the VFDDEs (6.1) with \(\eta =1, \kappa =0.1\) and subject to
where
This problem has an exact solution \(\nu (\xi ,\tau )=10\xi ^{2}(1-\xi )^{2}(\tau ^{2}+1)\) and
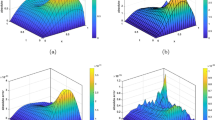
Figure 1 represents the AE of Example 7.1 for M=N=8 and distinct values of \(\delta (\xi ,\tau )\). Also, Fig.2 represents a comparison between the exact solution and the approximate solution using the proposed method.

AE of Example 7.1

Approximate and exact solution of Example 7.1
Example 7.2
Consider the VFDDEs (6.1) with \(\eta =1,~~\kappa =0.2\) and subject to
where
This problem has a exact solution \(\nu (\xi ,\tau )=5\xi (1-\xi )(\tau +1)\) and
Figure 3 represents AE of Example 7.2 for \(M=N=8\) and distinct values of \(\delta (\xi ,\tau )\). A comparison between the exact and the approximate solutions of Example 7.2 is given in Fig. 4.

AE of Example 7.2

Approximate and exact solution of Example 7.2
8 Conclusion
In this paper, we formulate the collocation method and the OMs of shifted Legendre–Laguerre polynomials to approximate the solutions of VFDDEs. The proposed method transform the VFDDEs to system of algebraic equations using the nodal points of Newton–Cots. By solving the algebraic system using Newton’s iterative methods, numerical solutions are obtained. The numerical results approved that the proposed method is accurate and has very high accuracy as M and N increased.
References
Akrami, M.H.; Atabakzadeh, M.H.; Erjaee, G.H.: The operational matrix of fractional integration for shifted Legendre polynomials (2013)
Ames, W.F.: Fractional differential equations-an introduction to fractional derivatives fractional differential equations to methods of their solution and some of their applications. Math. Sci. Eng. 198(1), 340 (1999)
Bayrak, M.A.; Demir, A.; Ozbilge, E.: Numerical solution of fractional diffusion equation by Chebyshev collocation method and residual power series method. Alex. Eng. J. 59(6), 4709–4717 (2020)
Dehestani, H.; Ordokhani, Y.; Razzaghi, M.: Fractional-order Legendre–Laguerre functions and their applications in fractional partial differential equations. Appl. Math. Comput. 336, 433–453 (2018)
Doha, E.H.; Bhrawy, A.H.; Ezz-Eldien, S.S.: An efficient Legendre spectral tau matrix formulation for solving fractional subdiffusion and reaction subdiffusion equations. J. Comput. Nonlinear Dyn. 10(2), 021019 (2015)
Džurina, J.; Grace, S.R.; Jadlovská, I.; Li, T.: Oscillation criteria for second-order Emden—fowler delay differential equations with a sublinear neutral term. Mathematische Nachrichten 293(5), 910–922 (2020)
El-Ajou, A.; Oqielat, M.N.; Ogilat, O.; Al-Smadi, M.; Momani, S.: Mathematical model for simulating the movement of water droplet on artificial leaf surface. Front. Phys. 7, 132 (2019)
Evangelista, L.R.; Lenzi, E.K.: Fractional Diffusion Equations and Anomalous Diffusion. Cambridge University Press, Cambridge (2018)
Goufo, E.F.D.; Kumar, S.; Mugisha, S.B.: Similarities in a fifth-order evolution equation with and with no singular kernel. Chaos Solitons Fract. 130, 109467 (2020)
Gülsu, M.; Gürbüz, B.; Öztürk, Y.; Sezer, M.: Laguerre polynomial approach for solving linear delay difference equations. Appl. Math. Comput. 217(15), 6765–6776 (2011)
Hassani, H.; Machado, J.A.T.; Avazzadeh, Z.; Naraghirad, E.: Generalized shifted Chebyshev polynomials: solving a general class of nonlinear variable order fractional PDE. Commun. Nonlinear Sci. Numer. Simul. 85, 105229 (2020)
Heydari, M.H.; Avazzadeh, Z.: Orthonormal Bernstein polynomials for solving nonlinear variable-order time fractional fourth-order diffusion-wave equation with nonsingular fractional derivative. Math. Methods Appl. Sci. 44(4), 3098–3110 (2021)
Heydari, M.H.; Avazzadeh, Z.: Jacobi–Gauss–Lobatto collocation approach for non-singular variable-order time fractional generalized Kuramoto–Sivashinsky equation. Eng. Comput. 38(2), 925–937 (2022)
Heydari, M.H.; Hosseininia, M.: A new variable-order fractional derivative with non-singular Mittag–Leffler kernel: application to variable-order fractional version of the 2D Richard equation. Eng. Comput. 1–12 (2020)
Hosseininia, M.; Heydari, M.H.; Avazzadeh, Z.: Numerical study of the variable-order fractional version of the nonlinear fourth-order 2D diffusion-wave equation via 2D Chebyshev wavelets. Eng. Comput. 37(4), 3319–3328 (2021)
Hosseinpour, S.; Nazemi, A.; Tohidi, E.: A new approach for solving a class of delay fractional partial differential equations. Mediterr. J. Math. 15(6), 1–20 (2018)
Jalil, A.F.A.; Khudair, A.R.: Toward solving fractional differential equations via solving ordinary differential equations. Comput. Appl. Math. 41(1), 1–12 (2022)
Jhinga, A.; Daftardar-Gejji, V.: A new numerical method for solving fractional delay differential equations. Comput. Appl. Math. 38(4), 1–18 (2019)
Karris, S.T.: Numerical Analysis Using MATLAB and Excel. Orchard Publications, Fremont (2007)
Khader, M.M.; Mahdy, A.M.S.; Shehata, M.M.: Approximate analytical solution to the time-fractional biological population model equation. Jokull 64, 378–394 (2014)
Khalaf, S.L.; Khudair, A.R.: Particular solution of linear sequential fractional differential equation with constant coefficients by inverse fractional differential operators. Differ. Equ. Dyn. Syst. 25(3), 373–383 (2017)
Khudair, A.R.: On solving non-homogeneous fractional differential equations of Euler type. Comput. Appl. Math. 32(3), 577–584 (2013)
Khudair, A.R.; Haddad, S.A.M.; et al.: Restricted fractional differential transform for solving irrational order fractional differential equations. Chaos Solitons Fract. 101, 81–85 (2017)
Kilbas, A.: Theory and Applications of Fractional Differential Equations.
Kumar, S.; Kumar, A.; Momani, S.; Aldhaifallah, M.; Nisar, K.S.: Numerical solutions of nonlinear fractional model arising in the appearance of the strip patterns in two-dimensional systems. Adv. Differ. Equ. 1, 1–19 (2019)
Liu, J.; Li, X.; Xiuling, H.: A RBF-based differential quadrature method for solving two-dimensional variable-order time fractional advection-diffusion equation. J. Comput. Phys. 384, 222–238 (2019)
Malik, A.M.; Mohammed, O.H.: Two efficient methods for solving fractional lane-emden equations with conformable fractional derivative. J. Egypt. Math. Soc. 28(1), 1–11 (2020)
Phillips, G.M.; Taylor, P.J.: Theory and Applications of Numerical Analysis. Elsevier, New York (1996)
Samko, S.G.: Fractional Integrals and Derivatives, Theory and Applications. Nauka I Tekhnika, Minsk (1993)
Saadatmandi, A.; Dehghan, M.: A new operational matrix for solving fractional-order differential equations. Comput. Math. Appl. 59(3), 1326–1336 (2010)
Singh, J.; Kumar, D.; Baleanu, D.; Rathore, S.: An efficient numerical algorithm for the fractional Drinfeld–Sokolov–Wilson equation. Appl. Math. Comput. 335, 12–24 (2018)
Shekari, Y.; Tayebi, A.; Heydari, M.H.: A meshfree approach for solving 2D variable-order fractional nonlinear diffusion-wave equation. Comput.Methods Appl. Mech. Eng. 350, 154–168 (2019)
Sweilam, N.H.; Al-Mekhlafi, S.M.; Albalawi, A.O.: A novel variable-order fractional nonlinear Klein Gordon model: a numerical approach. Numer. Methods Part. Differ. Equ. 35(5), 1617–1629 (2019)
Wang, H.; Zheng, X.: Wellposedness and regularity of the variable-order time-fractional diffusion equations. J. Math. Anal. Appl. 475(2), 1778–1802 (2019)
Zheng, X.; Wang, H.: An optimal-order numerical approximation to variable-order space-fractional diffusion equations on uniform or graded meshes. SIAM J. Numer. Anal. 58(1), 330–352 (2020)
Zheng, X.; Wang, H.: An error estimate of a numerical approximation to a hidden-memory variable-order space-time fractional diffusion equation. SIAM J. Numer. Anal. 58(5), 2492–2514 (2020)
Zheng, X.; Wang, H.: Optimal-order error estimates of finite element approximations to variable-order time-fractional diffusion equations without regularity assumptions of the true solutions. IMA J. Numer. Anal. 41(2), 1522–1545 (2021)
Zheng, X.; Wang, H.: A hidden-memory variable-order time-fractional optimal control model: Analysis and approximation. SIAM J. Control Optim. 59(3), 1851–1880 (2021)
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Farhood, A.K., Mohammed, O.H. & Taha, B.A. Solving fractional time-delay diffusion equation with variable-order derivative based on shifted Legendre–Laguerre operational matrices. Arab. J. Math. 12, 529–539 (2023). https://doi.org/10.1007/s40065-022-00416-7
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40065-022-00416-7