
Abstract
In this paper, we study the stabilization problem of a disk beam structure with disturbance. Specifically, the structure consists of a beam clamped at one end to the center of a rotating rigid disk, while the other end is attached to a tip mass subject to a non-uniform bounded disturbance. We start the investigation by designing the controller via the Active disturbance rejection control (ADRC) approach. The high gain extended state observer (ESO) is first designed to estimate the disturbance, then the feedback observer-based controller is designed to employ the estimation to cancel the disturbance effect. Furthermore, the well-posedeness of the controlled system is proved using the semigroup theory. Using the Lyapunov method, the exponential stability is proved. Finally, the performance of the control method is illustrated by simulation results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
From a practical point of view, external disturbances (e.g., temperature, wind, noise, and vibration) and internal uncertainties (e.g., unknown system parameters and model errors) are the commonly encountered factors threatening the performance of flexible structures, which may cause various dangerous effects on the system such as mechanical failure, and increase the control error and other undesirable effects [16, 17, 28, 35, 36]. Consequently, considering control solutions for systems with uncertainties is of great importance in the industrial control systems. Various control methods have been developed for controlling such systems, such as sliding mode control (SMC) for nonlinear systems with disturbances [2, 19], Lyapunov approach for beam systems with boundary disturbance [22, 23], internal model control for output regulation of systems with external disturbance [33]. Unfortunately, most of these control approaches focus on the worst case scenario that makes the controller rather conservative.
Since its introduction by Han [25], the Active Disturbance Rejection Control (ADRC) approach has become a valid and practical control method, which attracts considerable attention due to its effectiveness against external and internal uncertainties, as well as its practical simplicity. The basic framework of the ADRC approach can be summarized in its capability to online estimate the total disturbance of the system using state observers, which are designed, specifically, to account for the class of the system model and the type of the uncertainties as well. The estimation is, then, added to the feedback observer-based controller to enable real time cancellation of the total disturbance at the start of each loop. With this approach, the control energy is significantly reduced, which is confirmed by many engineering practices [38], although the rigorous theoretical analysis is still lacking. The numerous applications have been carried out in the last decade, [20, 21] for the disk-beam system, and [12, 13, 28] for the beam with tip mass system; moreover, the stabilization problems of the wind-turbines subject to varying-frequency periodic load disturbances in [18], torsional plants with sinusoidal uncertainties in [29], Seismically excited building structure in [34], and trajectory tracking problem of a two-degree of freedom helicopter system in [37].
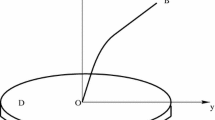
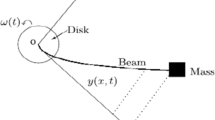
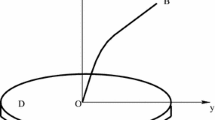
The rotating disk-beam system was introduced by Baillieul and Levi [4] to model some Aerospace systems. Then, Chentouf in [11], considered a rotating disk-beam-mass system which is a modified variant of that of Bailleul and Levi in [4]. As in [11], we assume that the disk (D) rotates freely about the x-axis with a time angular velocity and the beam (B) is clamped at the center of a disk and attached at its free end to a tip mass. The motion of the beam is confined to a x–y plane perpendicular to the disk and all the deflections are assumed to be parallel to the y-axis. The disk is supposed to rotate without friction. The system can be schematically shown in Fig. 1 (Chen et al. [14]). This system arises in the study of aerospace engineering applications, flexible robots arms and flexible marine risers. The system can be modeled as follows
y represents the transverse displacement of the beam from its equilibrium state (i.e., the x-axis), all the subscripts on \(y_{x}\) and \(y_{t}\) denote the derivatives with respect to the position x and the time t variables, respectively. \(EI>0\) is the flexural rigidity, \(\rho >0\) is the mass per unit length of the beam, \(I_d\) is the disk’s moment of inertia, m is the mass of the tip mass, J is the moment of inertia of the tip mass and \(\bar{\omega }(t)\) is the angular velocity of the disk. r(t) is the boundary moment control and u(t) is the boundary control force exerting to the tip mass. \(d_0(t)\) and d(t) are the unknown non-uniformly bounded disturbances affecting the tip mass at \(x=l\). \({\mathcal {T}}(t)\) is the torque control applied on the disk which is chosen as \({\mathcal {T}}(t)=\lambda (\bar{\omega }(t)-\omega )\) where \(\lambda >0\) and \(\omega \) is the equilibrium point of \(\bar{\omega }(t)\).

Disk-beam-mass system (Chen et al.[14])
In this paper, the dynamical term related to the mass is not neglected, but the dynamical term \(Jy_{xtt}(1,t)\) is so small that one can ignore it. In physical terms, this correspond to the case where the mass attached to the flexible beam, has high density. Furthermore, we assume that the angular velocity of a disk is constant \(\bar{\omega }(t)=\omega \) and only the control is acting on the shear force of the beam. Hereupon, the system is governed by the following linear system:
The unknown external disturbance satisfies the following conditions:
Assumption 1.1
The disturbance d(t) is differentiable. Moreover, there exists two positive constants \( C, \delta > 0 \) such that
In recent past decades, there existed many publications that contributed to dealing with beam systems with and without disturbance. Morgul [31] proved the exponential stability for an Euler-Bernoulli beam without a mass at the end. Laousy and Chentouf [26] have proved the exponential stability for Euler-Bernoulli flexible beam with tip mass, which describes the Scole model in the sense that the moment of inertia at \(x=l\) is neglected. This result is proved in [1, 8] for the non-homogeneous beam. In other hand, when \(my_{tt}(l,t)=0\) and the moment of inertia is accounted for, i.e., \(J>0\), the exponential stability is proved, in [5] for the homogeneous beam. Guo et al. [22] have proved the exponential stability for an Euler-Bernoulli beam with boundary disturbance. In turn, if a tip mass is attached at the free end with the moment of inertia of the mass is neglected, the exponential stability was proved in [28]. Chen and Jiang [12] have proved the exponential stability for an Euler-Bernoulli beam with mass and two disturbances affecting the tip mass. The exponential decay is proved for the rotating disk beam without mass and disturbance in [30] with a constant angular velocity. In the other case of a time-varying velocity, the exponential stability is proved in [15, 27] with static boundary controls and in [6, 9] with dynamic boundary controls. Similar achievement has been reached in [10] through the consideration of a linear direct strain controls, and in [7] by means of nonlinear controls. For a rotating disk beam with mass and without disturbance, Chen et al. [14] proved the exponential stability when \(my_{tt}(l,t)=0\). This result is proved by Aouragh and Segaoui [3] when \(Jy_{xtt}(l,t)=0\). When \(m=0\) and based on a constant gain for extended state observer (ESO), Guo and Wang [20] have proposed the feedback controller for the rotating disk-beam system with boundary input disturbances with \(\omega (t)\) variable and proved that the closed-loop system is exponentially stable when the disturbance and the derivative of disturbance are uniformly bounded, this assumption is avoided in [24] by proposing to estimate the uncertainties by time-varying gain ESO for the feedback control of a coupled heat and ordinary differential system subject to boundary control matched disturbance. This approach was used in [21] for a rotating disk beam with time-varying angular velocity.
The aim of this paper is to eliminate the vibrations caused by the external disturbance located at the tip mass of system (2). To this end, and since the disturbance d(t) and its derivative \(\dot{d}(t)\) are bounded by exponential, we employ the ADRC approach. Indeed, we design an extended state observer (ESO) to track the disturbance d(t), then, install the proposed control law which utilizes the generated estimation to cancel the effect of the disturbance in real-time. Thus, stabilizing problem (2).
The paper is organized as follows. In Sect. 2, we design a controller using the ADRC approach. To this end, we start by designing the state observer to track the boundary disturbance, then, we propose a control force to employ the estimation generated by the ESO to eliminate the disturbance. In Sect. 3, after reformulating the closed-loop system into an abstract evolution equation, we prove the well-posedness by the semigroup theory. Sect. 4 is dedicated to the stability result using a suitable Lyapunov function candidate. Furthermore, we conclude in Sect. 5 by providing simulation example to illustrate the validity of the theoretical results. Finally, we give some concluding remarks in Sect. 6.
2 Feedback controllers via ADRC
The high gain extended state observer (ESO) is designed in this section, and the ESO objective is to estimate the disturbance d(t) in real-time. First, we design the observer-based feedback control force of the following form
where v(t) is a new control variable that will be determined later in this section, and \(\alpha ,\beta >0\) satisfy the condition: \(\alpha \beta =m\).
Now, by substituting the control form (4) into the third equation in (2), we obtain
where \(\eta \) is an auxiliary function, which has the following form
Next, to estimate the disturbance d(t) affecting the tip mass, we design the following extended state observer for the ODE equation (5)
where the function a(t) is a time varying high gain function.
Furthermore, to prove the exponential stability of the closed-loop system, we assume that the high gain function and its derivative are positive (i.e. \(a(t)>0\) and \(\dot{a}(t)>0\)), and satisfies the following conditions
where \(\delta \) is the same constant in (3) and \( M_{0} \) is a positive constant.
It is worth mentioning that from (8), we can see that the high gain function a(t) is of exponential type. Thus, there exists two constant \(\theta \) and \(\mu \) satisfying \(a(t)=\mu e^{\theta t}\).
The following lemma gives the asymptotic behavior of the solutions of extended state observer (7).
Lemma 2.1
Let \(({\hat{\eta }}(t), {\hat{d}}(t))\), be the solution of (7). If the disturbance condition (3) as well as the high gain function condition (8) hold, we have
where \(\delta<\theta <M_0\), and \(C_2\) is some positive constant.
Proof
Set the errors \(({\tilde{\eta }},{\tilde{d}})\) as follows
Then, the following ODEs can be easily obtained from (5) and (7)
Thus, (9) and (10) can be easily obtained according to Theorem 2.1 and Corollary 2.1 in [28]. \(\square \)
From (9), we know that \({\hat{d}}(t),\) is the estimations of the disturbance d(t). Now, let us return to the already designed controller (4), setting \(v(t)=-{\hat{d}}(t)\) yields
Therefore, system (2) becomes the following closed-loop system
In the following sections, we discuss the well-posedness as well as the stability of the closed-loop system (14).
3 Formulation of the problem and the well-posedness of the closed-loop system (14)
This section is dedicated to the well-posedness of the closed-loop system (14). Clearly, if the existence and uniqueness of the \((y,\eta )\) variables is established, then the \(({\tilde{\eta }},{\tilde{d}})\)-part from system (14) (i.e. the ESO system (12)) admits a unique solution for any given initial value, since the Local Lipschitz condition of the right side of system (12) ensure the local existence and uniqueness of a solution for (12). Furthermore, we already established in Lemma 2.1 the convergence of said solution, which asserts two important results; from (9) the local solution of system (12) never blows up, so the global solution exist; also, from (10) we have the exponential stability of system (12). Therefore, the \(({\tilde{\eta }},{\tilde{d}})\)-part is no longer a concern and can be neglected in the following sections.
System (14), therefore, can be reduced to the following one
Let \(V_0^k:=\{y\in H^k(0,l)/y(0)=y_x(0)=0\}\) be the Sobolev spaces for \(k\in \{2,3,...\}\). We define the state space as
endowed with the new inner product
where \(k>\frac{\beta }{\alpha }\). Then, norm induced by the last inner product is equivalent to the usual one (see [27]) provided that
which is supposed to be valid throughout the paper. Then, we defined an unbounded linear operator A by
for \((y,z,\eta )^T\in D(A)\) where
Now, we can reformulate the system (15) as a first-order evolution equation
with the initial condition \((y_0,z_0,\eta _0)^T=(y_0(x),y_1(x),\eta (0)^T\), where
The following theorem concerns the well-posedness of system.
Theorem 3.1
The operator A generates a C\(_0-\) semigroup of contraction \(e^{At}\) on the space \({\mathcal {X}}\). Hence, the system (20) is well-posed.
Proof
First, we show that A is dissipative. Let \(u=(y,z,\eta )^T\in D(A)\). Thanks to \(k>\frac{\beta }{\alpha }\), we have
Thus, A is dissipative in \({\mathcal {X}}\).
Next, we prove that \({\mathcal {R}}(\lambda I-A)={\mathcal {X}}\), for some \(\lambda >0\). It suffices to show that for any \(F=(f_1,f_2,f_3)\in {\mathcal {X}}\), there exits \(U=(y,z,\eta )\in D(A)\) such that \((\lambda I-A)U=F\). That is equivalent to the following system:
Obviously, it suffices to find y. We multiply the second equation of (22) by a test function \(\varphi \in V^2_0 \). A simple integration by parts over [0, l] yields
which can be written as \(\Psi (y,\varphi )=L(\varphi )\), where \(\Psi (y,\varphi )\) is a continuous coercive bilinear form on \(V^2_0\times V^2_0 \) and \(L(\varphi )\) is a continuous linear form on \(V^2_0 \). Using Theorem of Lax-Milgram, there exists a unique solution \(y\in V^2_0\) of (23). Therefore, the operator A generates a C\(_0-\)semigroup of contraction \(e^{At}\) on the space \({\mathcal {X}}\) by the Lumer-Philips theorem (see [32]). Moreover, F(t) is local Lipschitz continuous on \({\mathbb {R}}^{+}\); thus, system (20) is well-posed. \(\square \)
4 Exponential stability
In this section, we discuss the exponential stability of the closed-loop system (15) using a suitable Lyapunov function. Before that we introduce the following important inequalities:
Lemma 4.1
(Young’s inequality) If a, b are non negative real numbers and p, q are positive numbers satisfying the condition \( \frac{1}{p} + \frac{1}{q} =1 \), then
Lemma 4.2
Let w(x, t) be a function where \(x \in (0,l)\) and \(t \in (0,\infty )\) which satisfy the boundary conditions \(w(0,t)=w_{x}(0,t)=0\) for \(t \in (0,\infty )\), then we have
We define the energy functional E(t) of system (15) as follows:
Now, we consider the following functionals
where \(0<\chi <\min \left\{ \frac{1}{{\sigma }},\frac{\alpha }{l},{\frac{EI\rho }{l^{3}\alpha \vartheta }} \right\} \), \({\sigma }=\max \left\{ {\frac{12l^{3}}{3EI}},\frac{l}{\rho },1 \right\} \), \(k>\frac{\beta ^{2}}{m}\), and \(\vartheta >0\) a positive constant to be fixed later. Then, our Lyapunov function candidate has the following form
Next, we show the boundedness of (26) in the following lemma.
Lemma 4.3
Let the Lyapunov function candidate V(t) be defined as in (25) and (26). If the constant velocity satisfies \({\omega ^{2}<\frac{9EI}{l^{4}\rho }}\), then there exist two positive constant \(\varrho _{1}\) and \(\varrho _{2}\), where
Proof
Using Young’s inequality, we get
Taking the forth inequality in Lemma 4.2 in mind, and the condition on \(\omega \) as well, i.e., \({\omega ^{2}<\frac{9EI}{l^{4}\rho }}\), we obtain
Using the third inequality in Lemma 4.2 provides
where \( {\sigma }=\max \left\{ {\frac{12l^{3}}{3EI}},\frac{l}{\rho },1 \right\} \). Then, it follows directly from the last inequality (28) that
Since \( \chi <\frac{1}{{\sigma }} \), we finally obtain
where \(\varrho _{1}=\min \left\{ 1-\chi {\sigma },\; \frac{k}{2} \right\} \), \(\varrho _{2}=\max \left\{ 1+\chi {\sigma },\; \frac{k}{2} \right\} \). The proof is complete. \(\square \)
Theorem 4.4
Assume condition (17) holds. If the angular velocity \(\omega \), and the control gain \(\beta \) satisfy the following conditions:
Then, the closed-loop system (15) is exponentially stable.
Proof
A straightforward calculation yields
Moreover, we have
where
similarly,
also,
Reporting (32), (33), and (34) into (31) yields
Using Lemma 4.1 and the second inequality in 4.2, we get
where \(\vartheta >0\) is a positive constant. Thus, reporting (36) into (35) yields
Obviously, a direct calculation yields
Therefore, from (29),(30) and (37), we see that (38) becomes
According to the first inequality in Lemma 4.2 and Young’s inequality, we further have
Thus, estimate (39) becomes
Taking into account the condition \({\omega ^{2}<\frac{9EI}{l^{4}\rho }}\), we can choose \(\vartheta \) in order to have
Since \(k>\frac{\beta ^{2}}{m}\), \(0<\chi <\min \left\{ \frac{\alpha }{l},{\frac{EI\rho }{l^{3}\alpha \vartheta }} \right\} \), it holds that
Therefore, adding the term \( \frac{\delta _{1}\omega ^{2}\rho }{2} \int _{0}^{l} y^{2}(x, t) d x \) to (42), using estimate (27), and setting \(\delta _{1}=\min \left\{ \frac{k}{2\beta }-\frac{1}{2 \alpha }, \frac{\chi }{EI\rho }\right. \left. \left[ { 3EI-\frac{\omega ^{2}\rho l^{4}}{3}-\frac{EI}{\vartheta }}\right] ,\frac{\chi }{\rho } \right\} \) and \(\nu =\frac{\delta _{1}}{\varrho _{2}}\) yields
Now, from estimates (43), (10), and according to Gronwall’s inequality, we obtain
where \( \delta '_{0}=\frac{kC_{2}}{2\beta }\frac{1}{\arrowvert 2(\theta -\delta )-\nu \arrowvert } \). Set
Hence,
Moreover, it is evident that the energy function E(t) from (24) satisfies
where \( \varrho '_{1}=\min \left\{ 1,\frac{k}{2}\right\} \) and \( \varrho '_{2}=\max \left\{ 1,\frac{k}{2}\right\} \); thus, using (27), (44), and (45) yields
This ends the proof. \(\square \)

Displacement y(x, t) without control
5 Numerical simulation
In this section, we present some numerical simulations for system (2) using finite difference method in time and space for the space-time domain \([0,1]\times [0,10]\). Here, we subdivided the spatial interval into \(N=10\) subintervals and the temporal interval into \(M=30000\) subintervals. The parameters, the initial data, disturbance and the time varying high gain function are chosen as
From Fig. 2, we can see that without control (i.e. \(\alpha =\beta =0\)) the displacement y(x, t) is not stabilized. Examining Fig. 3, we can notice that the vibration of the system is greatly suppressed when the developed control is applied to the system. From Fig. 4, we can observe that the disturbance d(t) and its estimation \({\hat{d}}(t)\) are almost the same only after 4s. Consequently, the estimation \({\hat{d}}(t)\) can be used to track the disturbance d(t) very fast.

Displacement y(x, t) with control

Disturbance d(t), estimation \({\hat{d}}(t)\), and error \({\tilde{d}}(t)=d(t)-{\hat{d}}(t)\)
6 Concluding remarks
In this paper, we studied the stabilization problem of a uniformly rotating disk-beam-mass system with a boundary disturbance. The ADRC approach was used to design the controller, where the extended state observer (ESO) was, first, constructed to estimate the disturbance, then, the control force uses these estimations to online cancel the disturbance effect. The well-posedness of the system is proved using the semigroup theory. Finally, we showed that the closed-loop system is exponentially stable by the Lyapunov method.
An interesting research problem would be the extension of the results presented in this paper to the time-varying angular velocity case and the non-uniform beam case. It would be, also, interesting to study the exponential stabilization for the system when the moment of inertia is accounted for. These will be the subject of future works.
References
Aouragh, M.D.; El Boukili, A.: Stabilization of variable coefficients Euler-Bernoulli beam equation with a tip mass controlled by combined feedback forces. Ann. Univ. Craiova, Math. Comput. Sci. Ser. 42(1), 238–248 (2015)
Aouragh, M.D.; Nahli, M.: Stabilization of an axially moving elastic tape under an external disturbance. Acta Appl. Math. (2022). https://doi.org/10.1007/s10440-022-00473-2
Aouragh, M.D.; Segaoui, M.: Riesz Basis and exponential stability of a variable coefficients rotating disk-beam-mass system. J. Dyn. Control Syst. (2022). https://doi.org/10.1007/s10883-021-09590-x
Baillieul, J.; Levi, M.: Rotational elastic dynamics. Physica D 27(1–2), 43–62 (1988)
Chentouf, B.: Boundary feedback stabilization of a variant of the SCOLE model. J. Dyn. Control Syst. 9(2), 201–232 (2003)
Chentouf, B.: A simple approach to dynamic stabilization of a rotating body-beam. Appl. Math. Lett. 19(1), 97–107 (2006)
Chentouf, B.; Couchouron, J.F.: Nonlinear feedback stabilization of a rotating body-beam without damping. ESAIM: Control Optim. Calc. Var. 4, 515–535 (1999)
Chentouf, B.; Wang, J.M.: Optimal energy decay for a nonhomogeneous flexible beam with a tip mass. J. Dyn. Control Syst. 13(1), 37–53 (2007)
Chentouf, B.; Wang, J.M.: Stabilization and optimal decay rate for a non-homogeneous rotating body-beam with dynamic boundary controls. J. Math. Anal. Appl. 318(2), 667–691 (2006)
Chentouf, B.; Wang, J.M.: On the stabilization of the disk-beam system via torque and direct strain feedback controls. IEEE Trans. Autom. Control 60(11), 3006–3011 (2015)
Chentouf, B.: Modelling and stabilization of a nonlinear hybrid system of elasticity. Appl. Math. Model. 39(5), 621–629 (2015)
Chen, Z.; Jiang, W.: Stabilization for a hybrid system of elasticity with boundary disturbances. J. Syst. Sci. Complex. 33(6), 1873–1885 (2020)
Chen, Z.; Jiang, W.: Stabilization of a constrained one-link flexible arm with boundary disturbance. Int. J. Control 94(1), 134–143 (2021)
Chen, X.; Chentouf, B.; Wang, J.M.: Exponential stability of a non-homogeneous rotating disk-beam-mass system. J. Math. Anal. Appl. 423(2), 1243–1261 (2015)
Chen, X.; Chentouf, B.; Wang, J.M.: Nondissipative torque and shear force controls of a rotating flexible structure. SIAM J. Control. Optim. 52(5), 3287–3311 (2014)
Chen, L.; Lv, Y.; Li, C.; Ma, G.: Cooperatively surrounding control for multiple Euler-Lagrange systems subjected to uncertain dynamics and input constraints. Chin. Phys. B 25(12), 525–533 (2016)
Chen, L.; Li, C.; Sun, Y.; Ma, G.: Cooperative impulsive formation control for networked uncertain Euler–Lagrange systems with communication delays. Chin. Phys. B 26(6), 516–526 (2017)
Coral-Enriquez, H.; Cortés-Romero, J.; Dorado-Rojas, S.A.: Rejection of varying-frequency periodic load disturbances in wind-turbines through active disturbance rejection-based control. Renew. Energy 141, 217–235 (2019)
Ginoya, D.; Shendge, P.D.; Phadke, S.B.: Disturbance observer based sliding mode control of nonlinear mismatched uncertain systems. Commun. Nonlinear Sci. Numer. Simul. 26(1), 98–107 (2015)
Guo, Y.P.; Wang, J.M.: The active disturbance rejection control of the rotating disk-beam system with boundary input disturbances. Int. J. Control 89(11), 2322–2335 (2016)
Guo, Y.P.; Wang, J.M.: Stabilization of a rotating flexible structure subject to matched input disturbances. Trans. Inst. Meas. Control. 41(10), 2864–2874 (2019)
Guo, B.Z.; Zhou, H.C.; Al-Fhaid, A.S.; Younas, A.M.M.; Asiri, A.: Stabilization of Euler-Bernoulli beam equation with boundary moment control and disturbance by active disturbance rejection control and sliding mode control approaches. J. Dyn. Control Syst. 20(2), 539–558 (2014)
Guo, B.Z.; Kang, W.: Lyapunov approach to the boundary stabilisation of a beam equation with boundary disturbance. Int. J. Control 87(5), 925–939 (2014)
Guo, B.Z.; Liu, J.J.; Al-Fhaid, A.S.; Younas, A.M.M.; Asiri, A.: The active disturbance rejection control approach to stabilisation of coupled heat and ODE system subject to boundary control matched disturbance. Int. J. Control 88(8), 1554–1564 (2015)
Han, J.Q.: From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 56(3), 900–906 (2009)
Laousy, H.; Chentouf, B.: Boundary feedback stabilization of a hybrid system. IFAC Proc. Vol. 32(2), 1797–1801 (1999)
Laousy, H.; Xu, C.Z.; Sallet, G.: Boundary feedback stabilization of a rotating body-beam system. IEEE Trans. Autom. Control 41(2), 241–245 (1996)
Li, Y.F.; Xu, G.Q.; Han, Z.J.: Stabilization of an Euler-Bernoulli beam system with a tip mass subject to non-uniform bounded disturbance. IMA J. Math. Control. Inf. 34(4), 1239–1254 (2017)
Madonski, R.; Stanković, M.; Shao, S.; Gao, Z.; Yang, J.; Li, S.: Active disturbance rejection control of torsional plant with unknown frequency harmonic disturbance. Control. Eng. Pract. 100, 104413 (2020)
Morgul, Ö.: Control and stabilization of a rotating flexible structure. Automatica 30(2), 351–356 (1994)
Morgul, Ö.: Dynamic boundary control of the Timoshenko beam. IEEE Trans. Autom. Control 37(5), 639–642 (1992)
Pazy, A.: Semigroup of linear operators and applications to partial differential equations. Springer, New York (1983)
Paunonen, L.; Pohjolainen, S.: The internal model principle for systems with unbounded control and observation. SIAM J. Control Optim. 52(6), 3967–4000 (2014)
Ramirez-Neria, M.; Morales-Valdez, J.; Yu, W.: Active vibration control of building structure using active disturbance rejection control. J. Vib. Control (2021). https://doi.org/10.1177/10775463211009377
Sun, Y.; Chen, L.; Ma, G.; Li, C.: Adaptive neural network tracking control for multiple uncertain Euler–Lagrange systems with communication delays. J. Franklin Inst. 354(7), 2677–2698 (2017)
Wang, J.M.; Liu, J.J.; Ren, B.; Chen, J.: Sliding mode control to stabilization of cascaded heat PDE-ODE systems subject to boundary control matched disturbance. Automatica 52, 23–34 (2015)
Zarei, A.; Poutari, S.M.; Barakati, S.M.: Trajectory tracking for two-degree of freedom helicopter system using a controller-disturbance observer integrated design. ISA Trans. 74, 99–110 (2018)
Zheng, Q.; Gao, Z.: An energy saving, factory-validated disturbance decoupling control design for extrusion processes, In: The 10th World Congress on Intelligent Control and Automation, Beijing, China, pp 2891–2896 (2012)
Acknowledgements
The authors would like to express their sincere thanks to the editor and the reviewers for their helpful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
No conflict of interest exists.
Availability of data
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aouragh, M.D., Nahli, M. & Segaoui, M. Stabilization of a uniform rotating disk-beam-mass system with boundary input disturbance. Arab. J. Math. 12, 35–48 (2023). https://doi.org/10.1007/s40065-022-00391-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40065-022-00391-z