
Abstract
Electric vehicles (EVs) are promising solutions to the problems faced by combustion engine-propelled automobiles. The futuristic transportation system would be majorly catered by battery EVs, hybrid EVs, and fuel cell EVs with a different combination of energy sources that could successfully meet the requirements of different categories of vehicle propulsion systems. However, to execute such vehicle systems with a high level of safety and comfort for the transportation of people and products, a few difficulties must be resolved. EVs of today face problems such as noise-vibration-harshness, energy storage difficulties, torque fluctuation/ripple in the power train, inadequate range, and some others. The present review paper comprehends major noise and vibration issues existing in EVs and attempts made by the researchers to find solutions to such problems. The major problem faced by the vehicle as well as by the passengers is vibration and discomfort. These vibrations if continued for a longer period might cause severe damages to the vehicle structure as well as to the passenger’s body. These issues must be thoroughly addressed by researchers to increase ride comfort, which is a crucial requirement of the hour as well.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The passenger and goods mobility at the surface level are a very essential requirement and are presently taken care of mainly by automobiles powered by thermal prime movers such as petrol and diesel engines. However, in the 21st century, issues faced by automobiles such as depleting oil sources, increased exhaust pollutants, causing air pollution, difficulty in meeting the stringy emission norms laid down by the regulatory bodies, noisy operation, higher maintenance, and running costs have led to the development of alternative modes of transportation [1].
In this regard, electric vehicles (EVs) seem to be a more promising alternative to the hitherto established combustion engine-propelled automobiles. Electric vehicles propelled by electric traction motors do not directly use any petroleum fuel, are quieter in operation, and require less maintenance and running costs [2]. In EVs, an electrically run motor known as a traction motor develops the vehicle's propulsion power according to the load requirements [3, 4]. Comparing the cost analysis of electric vehicles with that of ICE vehicles, EVs get cheaper in every kilometre driven. For example, comparing the costs of an ICE-driven motorcycle and an electric motorcycle data, as studied by Tuayharn et al., is shown in Fig. 1. Considering the same driving distance of 8097 km covered by both vehicles in a year, electric vehicles are found to be beneficial. Even though the initial cost of the electric vehicle is high, other expenses such as the electricity cost are very low. Different maintenance costs like changing the air filter and replacing of spark plug do not apply to the electric vehicle. Comparing the fuel consumption of an ICE motorcycle, the electricity consumption of an electric motorcycle feels very negligible and this becomes a major advantage of the electric vehicle [5].

Expenses of ICE motorcycle versus electric motorcycle [5]
Additionally, in the future, electric cars will play a critical role in improving air quality in heavily populated places. These assist in reducing the unfavourable impacts of hazardous gas exposure on humans [6]. As studied by Joseph and Joseph [7], the graph shown in Fig. 2 indicates the emissions generated from ICE vehicles and EVs and compares them. Observing the battery emissions, the emissions generated from the ICE vehicles are less compared to the BEV cars with ICE (diesel or petrol), used for long distances. Rather, the well to pump emission for electricity is found to be higher. However, the well-to-pump emission and operational emission for fossil fuel of BEV as well as BEV with ICE (diesel or petrol) are found to be very negligible compared to ICE vehicles. This illustrates that the total emissions emitted by the BEVs are very less compared to that of ICE vehicles. The plot gives the numerical values of emissions in gCO2e/km.

Stage emissions of different vehicles [7]
Based on the energy source used to feed power to the traction motor, electric vehicles are divided into the following broad categories. (i) Battery electric vehicles (BEVs)—which use the chemical energy that is stored in the rechargeable battery packs [8]. Examples like electric bikes and wheelchairs. (ii) Hybrid electric vehicles (HEVs)—which contain both an internal combustion engine and an electric drive train, which are coupled in various configurations such as series, parallel, series–parallel, and complex [9]. (iii) The energy source for fuel cell electric vehicles (FCEVs) is a fuel cell. Sometimes these are supplemented by a small battery or a super-capacitor. Such EVs are promising to claim more markets soon by emitting zero emissions [10]. (iv) Overhead supply line electric vehicles—which use overhead electric lines to take the energy and propel. Examples—tram buses [11]. (v) Solar electric vehicles—these use photovoltaic cells to convert the direct sun’s energy to electric energy [12]. (vi) Electric vehicles using flywheels for energy storage and supply [13].
The traction motors used for EVs have high starting torque, high power density, frequent start–stop capability, wider bandwidth constant power regime, and withstand harsh operating conditions such as shocks, vibrations, dirt, slush, and moisture environments encountered during vehicle operation on roads. Both AC and DC motors are employed in EVs [14]–[17]. Direct current motors, like DC brushed motors, provide a significant amount of torque at low speeds, which makes them ideal for traction systems. Brushed DC motors have a disadvantage that they have a lower power density, but they also have better performance and are simpler to maintain. Induction motors have tremendous proficiency and great speed control. The stator winding is coupled to the three-phase AC supply, generating a revolving magnetic field. In EVs, the AC induction motor drive is preferred. These days they are commonly acknowledged as being commutator less as they account for high reliability and maintenance-free. In permanent magnet synchronous (PMS) motors, the rotor runs at a synchronous speed within the synchronous motor. A DC supply excites the rotor, while the stator is connected to a 3-phase AC supply. Brushless AC motors are often referred to as PMS motors. The permanent magnet (PM) brushless motor drive is one of the most efficient motors in terms of energy output, followed by an induction motor with nearly comparable performance. Another kind of motor which could be used is the permanent magnet brushless DC motor. For application purposes, they operate on the transforming stator and rotor of the permanent magnet DC motor. In comparison with a sinusoidal supply, the BLDC motors are fed by an AC supply that is rectangular, given their configuration is relative to the PMS motors. The ability to produce higher torque compared to other motors at comparable peak levels of current and voltage is another advantage of PM BLDC motors. Switched reluctance rotor position switches are used in motors to power the distinct phase winding line. The possibility exists for a broad speed range. The rotor attempts to move to a place with the least resistance while generating the torque in this manner. SRMs offer qualities that make them suitable for EV application, such as a strong starting torque and excellent natural adaptability to non-critical failure.
The traction motor controls the torque, speed, and acceleration requirements of the vehicle. However, such EVs face some issues when in use on the road [15]. Major problems associated with the EVs while riding are short-range [18], higher weight [19], and bulkiness of the energy storage systems such as battery packs hence lowering the utility space [20], whole-body vibrations [21, 22], torque ripple [23], and torsion between traction motor and driveline [24]. Any successful attempt made in overcoming or minimizing the aforesaid deficiencies would result in improving the efficiency and performance of futuristic EVs. This study attempts to address the main challenges faced by EVs and potential solutions to such problem areas, especially torque ripple, torsion, and whole-body vibration, with a thorough examination of hybrid and electric vehicles.
Torque Ripple in the Traction Motor
Torque ripple, which refers to a periodic increase or decrease in the output torque as the shaft spins, is an effect present in many types of electric motors. When measuring this, it is often represented as the difference between the greatest and minimum torque across a full rotation [16, 17, 25].
The torque ripple is produced in all electrical devices by electromagnetic torque harmonics, irrespective of type or nature [26]. Non-idealities produce the harmonics in the electromagnetic fields produced by the rotor and stator interactions.
The cogging torque can be measured in a number of ways, including (a) using a standard torque transducer; (b) a strain gauge bridge centred on the stator reaction torque; (c) an observer of voltage and current torque; and (d) using a special torque transducer designed specifically for measuring the cogging torque. The torque ripple could be minimized in several ways, which could be a design approach or a control-based approach [27, 28].
Experimental Investigations
Experimentation is a very important and precise way of evaluating any device or setup. Through experimentation, different researchers cited in this section evaluate torque ripple and yield different minimization techniques for torque ripple which could be adopted.
The principle of instant torque management for BLDC drive control was proposed by Low et al. [29]. It was used as an alternative to traditional sinusoidal current regulation in order to minimize pulsed torque and produce the most effective torque possible. The findings demonstrate that in each of these cases, instantaneous torque control outperformed sinusoidal current control (speed control and position control). It was further shown that static torque/force control is accurate. Favre et al. [30] offer the right present shapes to drive a given motor without ripple torque and suitable back current or voltage supply EMF forms. This gives the sufficient current driving form of a given motor without ripple torque including a potential detent torque induced via interaction of the stator slots and the rotor magnets. Multiple current calculations were done by the iterative method which leads to a constant torque. Holtz and Springob [31] look at the various sources of torque ripples in containers with permanent magnets. The study introduced the adaptive control system and experimental findings to show its efficacy. Residual torque pulsations in PM synchronous machines were figured out from the analysis. They impaired their output with the sinusoidal flux relation type applications. The motor controlling model was constructed and analysed in equivalent circuit software by Wang et al. [32]. Calculations were made to determine how motor winding conductance affected the motor's torque ripple. The study came up with an adjustment of the currents of the quadrature axis and the direct axis to measure the current in the starter winding of the motor according to the equation of torque balance. This reduced the torque ripple of the motor at a specified speed corresponding to the natural frequency of the vehicle power train, weakened the resonance, and kept the speed of the vehicle stable. Using the two-level inverter Davari et al. [33] demonstrated that when FCS-MPC is applied, it calculates the weighting factor which zeroes the torque ripple. A speed control mechanism for the switched reluctance motor (SRM) along with the torque minimization of ripples using the multiple optimization liaison (MOL) technique was proposed by Saha et al. [34]. Analysis of the integral square speed error, torque coefficient, as well as the best, worst, mean, and standard deviation of the integral square error of speed and torque ripple, was conducted to compare the two controllers' performance. The outcomes show that due to its strong operational strength, MOL-based speed controllers increase output for SRM drives by decreasing setup and pulse torque times and by offering a superior current profile.
Numerical Analysis and Simulation
Numerical analysis and simulation play a vital role in any research. The experimental techniques used or the numerical solutions obtained could be validated by a simulation. Rather, it provides a way of doing things. This section provides a review of different researchers’ analysis techniques and simulations to understand and provide optimization techniques for torque ripple minimization.
Configurations with the active filter (AF) for reducing ripple torque and harmonic noises were proposed by Gulez et al. [35] for a permanent magnet synchronous motor. In order to compare the two, the main motor circuit employed the current control method of hysteresis, while the AF used the voltage control approach. The two control methods were separately combined to deliver almost sinusoidal voltage to the motor's windings. The configuration showed a smoother line that matched the current waveform and reduced ripple in the torque and current harmonics. The design has also demonstrated success in reducing EMI noise levels, which have an effect on engine control installation. Hasanien [36] developed a digital observer controller that is used for torque ripple minimization of motors. First, under the conditions of the maximum load torque and load disturbance, the dynamic response of the (PMSM) with the suggested controller was assessed. Examining revealed that the torque ripple was decreased when compared to the typical PI controller and that the dynamic responsiveness of the PMSM was improved when the controller was equipped with the digital observer. An enhanced MPTC with duty cycle control by effectively enhancing the vector selection and its duration while decreasing torque and flux errors was introduced by Zhang and Yang [37]. The results showed improved torque efficiency, with a much lower frequency of sampling with and without load, especially at low speeds. Two instantaneous field-oriented torque control techniques were introduced by Adhavan and Jagannathan [38]. By using iterative learning controllers and hysteresis pulse width modulation, the torque ripples in the PMSM drive were minimized. The simulation findings show that torque ripple is reduced using both techniques. Process ILC along with SVPWM reveals a better decrease in torque compared to an ILC with HPWM technology. Su et al. [39] suggested a technique of torque ripple reduction for induction motors based on a hybrid method of predictive torque control technique and particle swarm optimization. The results of the simulation demonstrated that a steady-state phase current had reduced fluctuations and much lower overall torque and flux ripple. In order to lower the ripple torque in a BLDC motor drive system that is based on the same rate of increase and decrease in inverter output currents, Mohanraj and Sankaran [40] devised a novel network design employing various converters to manage DC link voltage. It was recommended to use the new circuit architecture to minimize torque ripple over a wide range of speeds. The simulated outcome demonstrates that the SEPIC converter produces output that is superior to the Z-Source converter in every way. The engine starting procedure was separated into three steps by Hu et al. [41] engine cranking, velocity synchronization, and following the synchronization step. The investigation was done to determine the impact of various factors on the jerk. Clutch pressure coordinated monitoring technique and variable torque are proposed for base torque and motor torque. The simulation through MATLAB / Simulink single-engine parallel hybrid electric vehicle is done, and the effectiveness of the proposed electric vehicle is identified. The findings show that with the coordinated monitoring method proposed in this article, the vehicle jerk is substantially reduced during the engine starting phase. This strategy is efficient in terms of performance in enhancing vehicle operation and driving comfort. A novel method for reducing ripple was introduced by Raja and Geethalakshmi [42]. This was developed using a finite-element method (FEM) two-dimensional (2-d) process. To reduce BLDC motor torque ripple, a cost-effective redesigned rotor approach is provided. Performance comparisons indicate it is quite an effective process. Two key disadvantages are the original method and the skew method. The findings show that the ripple of the total torque has decreased dramatically. An analytical motor model that takes into account the harmonics and magnetic saturation features of PMSM, numerical magnetic co-energy solution (MCE), and finite element analysis (FEA) was proposed by Zhong et al. [43]. The optimal stator flux connection that minimized torque ripple was established as a result, and a feedforward controller for the SVPWM-DTC architecture was built. The outcomes showed that the SVPWM-DTC with a feedforward controller greatly reduced the torque ripple as compared to the feedforward control technique. The effectiveness of the regulating DTC is also considerably increased.
Additional analysis of ripple in traction motors and possible solutions are listed in Table 1.
Torsion Between Traction Motor and Driveline
A centrally charged battery-powered electric vehicle has a different powertrain than one powered by an internal combustion engine. It is directly coupled to its control grid and transmission system. When the EV is operating, the broad torque response slope readily causes longitudinal vibration due to driveline shock and torsion vibration [34, 35].
Torsion between driveline and traction motor could be studied through various techniques like modelling through ADAMS [50], and these could be avoided by various techniques like offline optimization technique to compensate for speed oscillations [51], and optimal anti-jerking shifting control [52]. Even with ICE, the torque distribution control is a very important criterion [53].
Experimental Investigations
This section includes a review of different researchers’ works which are based on experimental investigations of torsion between driveline and motor. Different techniques to minimize these issues are even discussed in this section.
A method for selecting the best solution for front-rear motor transmission was proposed by Rossi et al. [54]. The method was proved the best under mechanical and electrical constraints during operation. The splitting of the traction power between the two drives made this possible for a solution of low voltage. Considering both motor drives with the driver in mind commands, drivetrain limitations, battery-pack limitations, and power-sharing in the two drives. The findings are said to appear in the procedural documents. A novel simplified dynamic model of torsional vibration was proposed by Tang et al. [50] to find the characteristics of torsional vibration in a compound planetary hybrid propulsion system. The hybrid driveline's critical frequencies were assessed. This study served as the foundation for additional vibration control of the hybrid power train during the engine start/stop procedure. The recommended tri-mass simplified dynamic model might guide the installation of better control algorithms to reduce the entire hybrid system’s undesirable vibration during frequent engine start/stop cycles. Figel et al. [55] dealt with tests conducted with an electric hybrid plug-in vehicle. Various excitation amplitudes were applied at various vehicle speeds and driving conditions. Consequently, this analysis quantified the dependence of driveline shuffle characteristics. First, it could be mentioned that, at a particular operating point, second-order models suit the stage experiments very well which was in line with the linear 'two-inertia model' popularity. The natural frequency was found to vary linearly on the height of the phase. Rather, overall trials had extremely poor variation of the predicted natural frequency. The wear of the synchronizer ring in manual transmission gearbox synchronizers due to the torsional vibration was explained by Barathiraja et al. [56]. To replicate angular accelerations at the vehicle level, a bench test rig was created. Torsional vibration damping was examined using clutch size, oil viscosity, synchronizer ring guidance, and oil volume. Various experiments at the bench and vehicle levels were used to evaluate and confirm the wear reduction of the synchronizer carbon liner. It was found that the wear on the inner ring was higher than the wear on the outer ring. The bigger diameter clutch could dampen the propagation of torsional vibration into the gearbox. Vibration levels of electric motor bearing units were determined by Migal et al. [57]. Increased radial load had a significantly smaller impact on vibration development than did increasing bearing rotational frequency. The analysis concludes that increasing the service level while lowering vibration is possible by radial bearing noise levels of QE1 to QE6. Findings in this method are claimed to be valid for all traction forms of EMs.
Numerical Analysis and Simulation
This section includes the review of various researchers’ works which are based on numerical analysis and simulation of torsion between traction motor and driveline. Numerical evaluation of different techniques and mitigation of these issues are too discussed.
A new control concept for a rolling mill's drive system to suppress vibration and disturbance rejection was proposed by Zhang and Tong [58]. It was built on a special ESO and LQ controller that uses an ESO and feedforward load torque compensation system to measure the disturbance of unknown states and load torque. The suggested controller maintained stability when mechanical parameters were changed, and its validity and superiority were examined in contrast to the conventional PI controller and state feedback controller based on a reduced-order state observer. Templin and Egardt [59] studied the result of an anti-jerk LQR controller for motor vehicles. The alternative to commuting time was closely connected to the truck shake; the shaft torque was used as a virtual machine output and managed to zero. The controller served as a torque compensator for the torque of the driver demand which asymptotically followed the controller output. The torsional dynamic vibration equations of two mass rotor systems for PMSM & load/mechanical rotor was discussed by Chen et al. [60] using Newton's law. The electromechanical coupled torsional vibration model was performed with active vibration analysis. The simulation findings showed that a more precise assessment of the mechanical and electrical connection system's characteristics might significantly lessen torsional vibration, especially in the inertial load region. To reduce torsional vibration in compact hybridized power trains, Vadamalu and Beidl [61] presented an MPC-based VR controller as a state regulator based on a disturbance observer. Control algorithms based on the time domain (normal MPC) and frequency domain were introduced as two variations (spectral MPC). The MPC VR controller demonstrated that after being turned on for one second, oscillations decreased by around 1500 rpm on average. It was found that when vibration diminished over time, the VR controller was first set to its maximum torque value before being adjusted to lower levels. Song et al. [62] defined a parallel AWD, configuration with PHEV. To achieve effective power regulation based on the engine's ideal operating curve, a CD/CS technique was implemented. The results indicated that the improvement of traction helps to reduce excessive fuel consumption. On low cohesive highways, speed is said to be increased by an average of more than 24%. A linear quadratic Gaussian (LQG) controller with an estimator was presented by Zhang et al. [63] for the reduction of torsional vibration in a power-split vehicle powertrain. Twofold in transmission motors/generators are used to improve driver comfort and ensure a dynamic response. An equivalent planetary gear design to simplify transmission using the Lagrange method has been put forward. The outcome of simulations showed that the controller realized a goal that effectively minimized the input torque vibration and the output torque assuring dynamic vehicle qualities at the same time. An experimental vibration study of asynchronous electric motors (EMs) of the electric bus traction electric drive was performed by Arhun et al. [64]. This method allowed the development of assessment classes of the technical condition of the EMs by the degree of their vibration, making it possible to predict their resource. The method developed is claimed to be implemented at all stages of the electric motor's life cycle. It is shown that with vibration reduced by 8 dB, the EM’s ability is multiplied three times as much. A backlash drive mechanism was introduced by Yonezawa et al. [65] considering the limit on the control duration due to the characteristics of a motor to achieve vibration management. It was proposed to optimize the response between the sampling points to preserve the output throughout the control period pressure considering the limitation of the control span. Experiments and comparisons of the proposed control system validated the efficacy of monitor results with those obtained by a discrete conventional approximation. Wang et al. [66] proposed the TSB-based mesh stiffness of a PGT and the pure-torsional dynamic planetary model developed in this study. The impact of the TSB mesh stiffness on the transient torsional vibration of the PGT was observed at the point when the transient torsional vibration of the PGT showed a growing pattern with more teeth backlash. The simulation outcomes revealed that the genetic algorithm TSB modification approach decreased the transient torsional vibration of PGT as well as the ride comfort due to the thorough optimization criteria of TSB modification. During high-speed PGT, the method effectively reduced transient torsional vibration, vehicle jerk, and improved riding comfort. Power train vibration during the mode transition phase, as affected by clutching dynamic transfer friction torque, through a non-linear TTV model was conducted by Wang et al. [67]. The relative torsional oscillation suppression of PHPS was achieved by implementing a novel clutch oil pressure forming system for PHEVs during the mode transition phase after developing and numerically resolving the dynamic equations for the mode transition process to determine the TTV response and the vehicle jerk. Findings suggested that producing concave-type oil pressure might enhance ride comfort during the changeover period in addition to reducing PHPS transient vibration. It was further found that the new OPOM improved PHPS TV, as well as the vehicle jerk, was lower than that of the standard concave-type oil-pressure establishment process due to the complex optimization.
Table 2 shows research works carried out by researchers to analyse the causes for the torsion between traction motors and drive lines and possible solutions suggested to overcome the problem.
Whole-Body Vibration
The vibration of any frequency when transferred to the human body, it is called whole-body vibration (WBV) [73]. This may be the seat of the driver, moving trains’ platform, a power tool or one of several other components [74, 75]. This vibration is known to cause a variety of physiological problems, including musculoskeletal, circulatory, and nervous, both acute and chronic injury, and low back pain [76, 77]. Several whole-body vibration devices far surpass what is considered safe to the healthy standing person for even brief exposure [78]. Whole-body vibration could be eliminated or reduced by various techniques and methodologies like active and passive methods [79] and even by the efficient design of the sitting posture [80].
Experimental Investigations
This section includes a review of different researchers’ works based on experimental techniques to mitigate WBV. WBV when experimentally evaluated shows very precise results as it could be felt and hence required measures could be taken.
A vibration analysis on 14 different categories of vehicles comprising, tractors, lorries, lift trucks, buses, and vans was conducted by Paddan and Griffin [81]. Each vehicle's vibrations were measured along five axes: front and rear, lateral and longitudinal vibration on the floor foundation, vertical vibration under the seat, and front and backrest vibration. Different methods of measuring the vibration as described in the standards were compared. The broad range of calculated values indicates that by choosing suitable vehicles and operating environments, exposures to vehicle vibration could be minimized. The vertical axis on the seat pan has provided the highest frequency-weighted acceleration magnitude for most measurements. The exposures to WBV were discussed by Kim et al. [82]. By simulating real off-road vehicle vibration patterns with a 6° free-movement platform, the study assessed the excitation of the neck and low back muscles as well as self-reported pain in single-axial and multi-axial suspension seats. The experiment revealed that, during simulated tractor operation, the seat with multi-axial suspension appeared to lessen WBV exposures and related muscular tension, particularly in the left hand muscles. Wang et al. [83] suggested a generalized, real-time vibration suppression technique for an electric vehicle to minimize the coupling vibration during idling and cruising of vehicles. With a high-performance field-oriented electric motor drive (FOC), a little rotational velocity offset applied to the traction motor greatly decreased resonant vibration with no effect on the vehicle's speed. The simulation showed how well the suggested approach worked. The proposed strategy for the suppression of vibration in real-time provided excellent robustness over diverse driving conditions. It did not require any extra hardware installation and could be implemented in conjunction with other existing vibration suppression strategies. Kim et al. [84] tested the efficiency of various combinations of fore-aft, lateral, and vertical suspensions in reducing WBV exposures in laboratory environment. The study's findings showed that passive suspensions for the fore/aft (x), lateral (y), and vertical (z) axes were commercially available. Rather, it only had a limited ability to reduce axis vibration. In contrast, an active vertical (z-axis) vibration suspension system was able to do this more successfully than a passive suspension system.
Numerical Analysis and Simulation
This section includes review of different researchers’ works based on numerical analysis and simulations to mitigate WBV. These simulation works carried out depict the actual WBV problems faced by the vehicle and provide minimization techniques too.
A control strategy for identifying the resonance sources in an electric bus was presented by Karikomi et al. [85]. This approach used a complete zeroing system with an inverse filter and a feedback compensator. Torsional vibration was found to be controlled roughly by doing both the feedforward compensator and the feedback compensator. The results indicated that smooth and rapid acceleration output was achieved at a high level. Li and Zuo [86] modelled a rear twist beam suspension model suitable for high-frequency analysis in ADAMS/VIEW based on an existing eccentric motor-driven EV and said that optimized bushing parameters significantly minimize the peak values in the FRF curve and further minimize WBV. Fu et al. [87] introduced a method of vibration suppression control for an integrated electric and hybrid vehicle powertrain directly coupled to a motor-gearbox. The built-in powertrain was modelled as a two-mass system. The simulation results showed that the predicted states were near the states of reference. It was further shown to greatly inhibit system oscillation. And both the torsional angle and relative velocity difference were well controlled under different gear ratios, which was useful in improving the efficiency of the changes. The vibration control scheme proposed was therefore ideal for the integrated electric and hybrid electric train. Song et al. [88] measured the longitudinal acceleration and filtered it by a low-pass filter (LPF) thus the proposed fuzzy logic torque controller (FLTC). The proposed controller forces the real EV acceleration to follow the target acceleration well, which was smooth and did not contain any vibration part. The simulator results showed that the proposed FLTC minimized the driveline oscillations and increased the EV drivability. The transmissibility of vertical suspension seats and the Seat Effective Amplitude Transmissibility (SEAT) values in agricultural tractors were studied by Adam and Jalil [89] for a seated individual exposed to WBV. The analysis includes two road surface conditions: (i) Asphalt and (ii) Field. The vibrations (z-axis) were measured at the base of the arm, under the ischial tuber, and at the position of the thigh. Results suggested seat resonance frequency at about 2–3 Hz, and thigh resonance is higher than seat resonance. 112.6% (with weighting Wk) and 103.6% (with weighting Wb) were the calculated SEAT values. It was hypothesized that operating on off-road terrain increased the WBV in the vertical direction, causing the operator's body to expend more vibration energy. Tan et al. [90] provided an idea and a method for IWN driving of an electric vehicle (EV) vibration suppression, while it could provide some theoretical guidance for IWN driving EV design and optimization. Significant reductions in vibration energy were seen throughout the whole frequency range when the vibration energy transferred to the vehicle body was compared between before and after optimization. The claim that the superior design has improved even riding comfort is supported by the fact that other components have received less vibration energy, an indication of the optimization process' correctness. Guo and Wang [91] concentrated on the vibration of the HEV launch using pure electric mode, while the output torque was only produced by the electric motor. A related mathematical model was built based on the theory of work. The model was used to examine the electrical propulsion system's torsional vibration characteristics. Feedforward control (FFC) and pole placement (PP), two active control approaches, were employed to minimize HEV start vibration. Simulation results show that WSCS minimized most wheel angular acceleration (WAA) over-shooting compared to FFC and PP and had little effect on system response speed, which could be considered the most effective control process. An important theoretical technique for determining the resonance origins and transmission of vibrations for a pure electric bus was discussed by Zeng et al. [92]. The approach included a path analysis transfer, process deflection, and order analysis. The findings demonstrated that the power train mounts and V rods were primarily responsible for transmitting the vibration of the rear-drive axle and power train coupling to the bus floor, which enhanced the resonance of the whole driveline. The driveline and transfer route design as well as structural improvements were suggested for managing this problem based on the findings. RBDO approach to optimize the problems of vertical vibration posed by a modified EV was proposed by Wang et al. [93] using the FPST process. The statistical data obtained from the RBDO provide results for optimization of the maximum probability interval which could be used as the boundary conditions for optimizing other vehicle dynamics. A two-stage optimization control method for IWM-driven EVs to enhance ride comfort and comprehensively suppress IWM vibration was introduced by Liu et al. [94]. First, a mathematical model was created using a quarter-sized car with an active suspension and a DVA. Additionally, a finite-frequency HN controller for active suspension was created to enhance ride comfort by optimizing LMI. The findings demonstrated that the suggested finite frequency HN controller for active suspension could produce a more comfortable ride within the targeted frequency range as compared to the maximum frequency controller. Lei et al. [95] implemented a method of minimizing vibration and noise, which could reduce sources of noise excitation, such as peak to peak transmission error and its harmonics and maximum surface load. An enhanced multi-objective optimization algorithm was used to refine gear micro-geometry and the optimum micro-modification approach was quickly assessed. The efficacy of the proposed approach was checked by bench testing. The results of optimization showed that the proposed method of optimization could efficiently and rapidly decrease gearbox vibration and noise.
Table 3 shows analyses carried out on whole-body vibration (WBV) and the results obtained with which it’s possible to find out the effectiveness of the strategies used to minimize the problem.
Noise Issues in the Electric Vehicle
EVs are considered to provide smooth and noiseless operation. However, in practical conditions, EVs face major noise issues. Earlier, in the IC engines due to the noise generated by the engine itself, all the other noise produced in the vehicle was rarely noticed [101]. This phenomenon is called the “masking effect”. However, in EVs, these issues reappear as major noise issues and these will have to be taken care of while designing an EV [102].
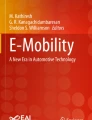
Current advancements in BEV’s NVH research to enhance future BEV systems X was studied by Hua et al. [21]. Considering tyre/road noise, wind noise, and ancillary system noise some effective solutions to overcome NVH in BEV were discussed. The researcher further suggests different research possibilities in this area, such as developing more effective models and algorithms, as well as decreasing the irritating high-frequency noise in BEVs. It would be a difficulty for both the experimental and numerical investigations. Marbjerg [103] performed noise tests on electric passenger vehicles and comparable combustion passenger cars in an experimental setting. Noise measurements of two types were carried out and reported. During steady driving, acceleration, and deceleration by engine braking, two electrical and two combustion passenger automobiles were used to conduct controlled pass-by (SPB) tests. Further, the noise measurements of energy saver tyres and the standard reference test tyres from a range of surfaces were analysed. Energy saver tyres are suggested for electric vehicles because they have lower rolling resistance and so consume less energy to go the same distance. Genuit [104] compared different noise issues between the gasoline engine and electric vehicle grouping them into exterior noise and interior noise. At the different modes of operation, the vehicles were tested like WOT (Wide open throttle), wherein different issues detected were showcased. Whining noise in the e-motor, whining noise in the gearbox, whining/whistling noise from the power electronics, and some other noise generated from the drivetrain were discussed. Future works include reduction of tyre-road noise and quite disturbing noise from slip-sick effects. Controlled pass-by (CPB) noise levels of an ICE vehicle and an equivalent EV were compared by Iversen and Skov [105]. The test carried out on a dense asphaltic concrete (DAC) urban road at speeds ranging from 10 to 60 km/h produced noises at different levels. When comparing the EV to the ICE vehicle, the EV produced less noise at low speeds, but the difference narrowed as speed increased. The noise level increases as the speed increases. As depicted in Fig. 3, Xitong et al. [106] explained the noise in electric vehicles concerning the speed of the vehicle. The research gaps and suggested future development opportunities are discussed further in the paper.

Noise in electric vehicles [106]
Conclusion
A comprehensive review of the research works carried out includes the collaboration work carried out by researchers, and their findings in improving the overall vibration aspects in electric and hybrid electric vehicles have been carried out. The conclusion drawn from this review is:
-
1.
Electric vehicles are the promising solution to challenges faced by combustion engine-propelled automobiles.
-
2.
EVs' and HEVs' performance and the ride could be improved by eliminating or minimizing the shock and vibration-related issues like torque ripple in the traction motor, torsion between the traction motor and driveline, and whole-body vibration.
-
3.
Torque ripple could be eliminated by modifications in design or control-based design as proposed by many researchers.
-
4.
Torsion between traction motor and driveline is a serious issue and analysed by ADAMS, LQG, LQR, and some other methods.
-
5.
Whole-body vibration in EVs or HEVs causes human comfort-based problems in the vehicle. This could be minimized and optimized by active and passive methods.
-
6.
Noise issues in the electric vehicle are indeed a potential threat in making EVs, the future transportation technique. Hence, there is a need to conduct in-depth NVH characterization of future EVs.
Research Gaps Identified and Future Development Possibilities
Based on the literature review, the major area of research in EV technology to be further explored by researchers is listed below.
-
1.
One of the major issues in EVs to be taken care of is “Range anxiety”. Improving the range of the vehicle might encourage the majority of the population to buy EVs.
-
2.
Noise-vibration and harshness of the EV need to be improved to give better ride comfort for the passengers and the driver.
-
3.
Fast charging or smart charging capabilities, as well as stations, are to be further explored.
-
4.
Battery thermal management is another major aspect of EVs that needs research attention for making the energy storage systems more reliable.
-
5.
In the case of HEVs, designing more efficient energy management strategies will improve their performance.
Change history
11 October 2023
A Correction to this paper has been published: https://doi.org/10.1007/s40032-023-00993-2
Abbreviations
- EV:
-
Electric vehicle
- SRM:
-
Switched reluctance motor
- FCEV:
-
Fuel cell electric vehicle
- BLDC:
-
Brushless direct current motor
- AWD:
-
All-wheel drive
- PMSM:
-
Permanent magnet synchronous motor
- BEV:
-
Battery electric vehicle
- LQG:
-
Linear quadratic Gaussian
- HEV:
-
Hybrid electric vehicle
- DMF:
-
Dual-mass flywheel
- AF:
-
Active filter
- FFC:
-
Feedforward control
- WAA:
-
Wheel angular acceleration
- FLTC:
-
Fuzzy logic torque control
- SEAT:
-
Seat effective amplitude transmissibility
- FOC:
-
Field-oriented electric motor drive
- EM-EVH:
-
Electromagnetic vibration energy harvesters
- MDOF:
-
Multi-degree of freedom
- LPF:
-
Low pass filter
- HYWM:
-
Hybrid pulse width modulation
- SVPWM-DTC:
-
Space vector pulse width modulation-Direct torque control
- MCE:
-
Magnetic co-energy solution
- MOL:
-
Multiple optimization liaison
- FCS-MPC:
-
Finite control set model predictive control
- LQR:
-
Linear quadratic controller
- TCO:
-
Total cost of ownership
- GWP:
-
Global warming potential
- MTW:
-
Motorized two wheeler
References
K. Wagh, P. Dhatrak, A review on powertrain subsystems and charging technology in battery electric vehicles: current and future trends. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. (2021). https://doi.org/10.1177/09544070211025906
P. Kumar, S. Chakrabarty, Total cost of ownership analysis of the impact of vehicle usage on the economic viability of electric vehicles in India. Transp. Res. Rec. 2674(11), 563–572 (2020). https://doi.org/10.1177/0361198120947089
Q. Zhang, Y. Li, C. Li, C.Y. Li, Real-time adjustment of load frequency control based on controllable energy of electric vehicles. Trans. Inst. Meas. Control 42(1), 42–54 (2020). https://doi.org/10.1177/0142331219849262
F. Jiao, Y. Zou, X. Zhang, R. Zou, Multi-objective optimal energy management of microgrids including plug-in electric vehicles with the vehicle to grid capability for energy resources scheduling. Proc. Inst. Mech. Eng. Part A J. Power Energy (2020). https://doi.org/10.1177/0957650920942998
K. Tuayharn, P. Kaewtatip, K. Ruangjirakit, P. Limthongkul, ICE motorcycle and electric motorcycle: environmental and economic analysis. SAE Tech. Pap. (2015). https://doi.org/10.4271/2015-01-0100
E. Paffumi, M. De Gennaro, G. Martini, Alternative utility factor versus the SAE J2841 standard method for PHEV and BEV applications. Transp. Policy 68, 80–97 (2018). https://doi.org/10.1016/j.tranpol.2018.02.014
N. Joseph, R. Joseph, Comparison of Ghg emissions between Icev and Bev based on Indian scenario. Int. J. Mech. Eng. Technol. 11(9), 38–47 (2020). https://doi.org/10.34218/ijmet.11.9.2020.005
E. Figenbaum, Battery electric vehicle fast charging-evidence from the norwegian market. World Electr. Veh. J. (2020). https://doi.org/10.3390/WEVJ11020038
D. Howell, FY 2009 status overview of D.O.E. hybrid and electric systems R&D EVS 2010-sustain. mobil. Revolut. 25th world batter. Hybrid Fuel Cell Electr. Veh. Symp. Exhib. 8, 461–472 (2010)
I. Alvarez-meaza, E. Zarrabeitia-bilbao, R.M. Rio-belver, Fuel-cell electric vehicles : plotting a scientific and technological knowledge map. Sustainability (2020). https://doi.org/10.3390/su12062334
I. Plan, Report_Implementation_Plan_for_Electrification_of_Public_Transport_in_Kolkata_1_November_2017. October (2017)
Q. Su, G. Zhang, J. Lai, S. Feng, W. Shi, Green solar electric vehicle changing the future lifestyle of human. EVS 2010-sustain. mobil. revolut. 25th world batter. Hybrid Fuel Cell Electr. Veh. Symp. Exhib. 4, 128–132 (2010)
M. Hedlund, J. Lundin, J. de Santiago, J. Abrahamsson, H. Bernhoff, Flywheel energy storage for automotive applications. Energies 8(10), 10636–10663 (2015). https://doi.org/10.3390/en81010636
P. Bhatt, H. Mehar, M. Sahajwani, Electrical motors for electric vehicle—a comparative study. SSRN Electron. J. (2019). https://doi.org/10.2139/ssrn.3364887
T. Holton, New NVH challenges within hybrid and electric vehicle technologies new NVH challenges within hybrid and electric vehicle, pp. 0–10 (2015)
M. Dai, A. Keyhani, T. Sebastian, Torque ripple analysis of a permanent magnet brushless DC motor using finite element method. In: IEMDC 2001-IEEE international electric machines and drives conference. 19(1): 241–245 (2001)
S. Mohammd Taher, A. Halvaei Niasar, S Abbas Taher, A new MPC-based approach for torque ripple reduction in BLDC motor drive. 12th Power Electron Drive Syst. Technol. Conf. PEDSTC (2021). https://doi.org/10.1109/PEDSTC52094.2021.9405871
L. Mao, A. Fotouhi, N. Shateri, N. Ewin, A multi-mode electric vehicle range estimator based on driving pattern recognition. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. (2021). https://doi.org/10.1177/09544062211032994
J. Yu, L. Yao, C. Ren, X. Yan, L. Lin, Design, analysis, and experimental validation of a novel seamless automatic transmission for electric vehicle. Adv. Mech. Eng. 10(2), 1–12 (2018). https://doi.org/10.1177/1687814018760021
F. Gasco, P. Feraboli, Manufacturability of composite laminates with integrated thin film Li-ion batteries. J. Compos. Mater. 48(8), 899–910 (2014). https://doi.org/10.1177/0021998313480195
X. Hua, A. Thomas, K. Shultis, Recent progress in battery electric vehicle noise, vibration, and harshness. Sci. Prog. 104(1), 1–11 (2021). https://doi.org/10.1177/00368504211005224
O. Munyaneza, J.W. Sohn, Modeling and control of hybrid MR seat damper and whole body vibration evaluation for bus drivers. J. Low Freq. Noise Vib. Act. Control (2021). https://doi.org/10.1177/14613484211063095
A. Sivaprakasam, L.N. Ramya, A new approach to minimize torque ripple and noise in model predictive control of permanent magnet synchronous motor drives. JVC/J. Vib. Control 27(7–8), 879–892 (2021). https://doi.org/10.1177/1077546320933743
X. Hua, E. Gandee, Vibration and dynamics analysis of electric vehicle drivetrains. J. Low Freq. Noise Vib. Act. Control 40(3), 1241–1251 (2021). https://doi.org/10.1177/1461348420979204
A. Akay, P. Lefley, Torque ripple reduction method in a multiphase pm machine for no-fault and open-circuit fault-tolerant conditions. Energies (2021). https://doi.org/10.3390/en14092615
G. Erfort, T.W. von Backström, G. Venter, Adaptive surface distortions for torque ripple control in vertical-axis wind turbines. Wind Eng. 45(2), 125–137 (2021). https://doi.org/10.1177/0309524X19874029
K. Jackiewicz, A. Kaszewski, A. Stras, B. Ufnalski, T. Balkowiec, Torque ripple reduction technique for a switched reluctance motor. 2020 22nd Eur. Conf. Power Electron. Appl. EPE 2020 ECCE Eur., pp. 1–10 (2020) https://doi.org/10.23919/EPE20ECCEEurope43536.2020.9215948
R. Nagarajan, Veeramuthulingam, Arivukkannu, Ezhilarasi, Muthiah, Torque ripple minimization effects for brushless direct current motor drive using model reference adaptive control. J. Comput. Theor. Nanosci. vol. 18, no. 3, pp. 609–619(11), 2021, [Online]. Available: https://www.ingentaconnect.com/contentone/asp/jctn/2021/00000018/00000003/art00005.
T.S. Low, T.H. Lee, K.J. Tseng, K.S. Lock, Servo performance of a BLDC drive with instantaneous torque control. IEEE Trans. Ind. Appl. 28(2), 455–462 (1992). https://doi.org/10.1109/28.126756
E. Favre, L. Cardoletti, M. Jufer, V. Vi, Permanent-magnet synchronous motors: a comprehensive approach to cogging torque suppression. IEEE Trans. Ind. Appl. 29(6), 1141–1149 (1993)
J. Holtz, L. Springob, Identification and compensation of torque ripple in high-precision permanent magnet motor drives. IEEE Trans. Ind. Electron. 43(2), 309–320 (1996)
Y. Wang, H. Jing, W. Chen, X. Wang, The analysis and simulation of motor’s torque ripple in electric vehicle. Int. Conf. Consum. Electron. Commun. Netw. 2011, 5328–5331 (2011)
S.A. Davari, D.A. Khaburi, R. Kennel, An improved FCS-MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Power Electron. 27(3), 1540–1551 (2012). https://doi.org/10.1109/TPEL.2011.2162343
N. Saha, A.K. Panda, S. Panda, Speed control with torque ripple reduction of switched reluctance motor by many optimizing liaison technique. J. Electr. Syst. Inf. Technol. 5(3), 829–842 (2018). https://doi.org/10.1016/j.jesit.2016.12.013
K. Gulez, A.A. Adam, H. Pastaci, Torque ripple and EMI noise minimization in PMSM using active filter topology and field-oriented control. IEEE Trans. Ind. Electron. (2008). https://doi.org/10.1109/TIE.2007.896295
H.M. Hasanien, Torque ripple minimization of permanent magnet synchronous motor using digital observer controller. Energy Convers. Manag. 51(1), 98–104 (2010). https://doi.org/10.1016/j.enconman.2009.08.027
Y. Zhang, H. Yang, Model predictive torque control of induction motor drives with optimal duty cycle control. IEEE Trans. Power Electron. 29(12), 6593–6603 (2014). https://doi.org/10.1109/TPEL.2014.2302838
B. Adhavan, V. Jagannathan, Performance comparison of hysteresis pulse width modulation and space vector pulse width modulation techniques for torque ripple reduction in permanent magnet synchronous motor using iterative learning control. JVC/J. Vib. Control 20(5), 698–712 (2014). https://doi.org/10.1177/1077546312463748
T.J. Su, T.Y. Tsou, S.M. Wang, T.Y. Li, H.Q. Vu, Torque ripple reduction of induction motor based on a hybrid method of model predictive torque control and particle swarm optimization. Adv. Mech. Eng. 8(10), 1–13 (2016). https://doi.org/10.1177/1687814016676465
N. Mohanraj, R. Sankaran, Converter control strategy for torque ripple minimization in BLDC motor. Energy Procedia 117, 951–957 (2017). https://doi.org/10.1016/j.egypro.2017.05.215
M. Hu, G. Jiang, C. Fu, D. Qin, Torque coordinated control in engine starting process for a single-motor hybrid electric vehicle. Adv. Mech. Eng. 9(7), 1–10 (2017). https://doi.org/10.1177/1687814017705965
M.S. Raja, B. Geethalakshmi, Modified rotor material for minimization of torque ripple for interior permanent magnet BLDC motor. Mater. Today Proc. 5(2), 3639–3647 (2018). https://doi.org/10.1016/j.matpr.2017.11.614
Z. Zhong, J. You, S. Zhou, Torque ripple reduction of DTC based on an analytical model of PMSM. World Electr. Veh. J. (2020). https://doi.org/10.3390/WEVJ11010028
J.Y. Hung, Z. Ding, Design of currents to reduce torque ripple in brushless permanent magnet motors. IEE Proc. B Electr. Power Appl. (1993). https://doi.org/10.1049/ip-b.1993.0032
W. Qian, S.K. Panda, J. Xu, Torque ripple minimization in PM synchronous motors using iterative learning control. IEEE Trans. Power Electron. (2004). https://doi.org/10.1109/TPEL.2003.820537
M. Rahimi, A new approach to minimize torque pulsations in PMSM driven by field oriented control. SPEEDAM 2010 (2010). https://doi.org/10.1109/SPEEDAM.2010.5545094
A. Ahmed, K. Gulez, Simulation modelling practice and theory reduction of torque pulsation and noises in PMSM with hybrid filter topology. Simul. Model. Pract. Theory 19(1), 350–361 (2011). https://doi.org/10.1016/j.simpat.2010.07.008
P. Taylor, K. Gulez, A.A. Adam, H. Pastaci, Passive filter topology to minimize torque ripples and harmonic noises in IPMSM derived with HDTC. Int. J. Electron. (2014). https://doi.org/10.1080/00207210601070911
L Flutter P Yu T Zhang S Chen J Li R Guo 2018 Torsional vibration modeling of driveline system for EV Scheme of EV longitudinal vibration drum test and data analysis. https://doi.org/10.4271/2015-01-2191.Copyright
X. Tang, W. Yang, X. Hu, D. Zhang, A novel simplified model for torsional vibration analysis of a series-parallel hybrid electric vehicle. Mech. Syst. Signal Process. 85, 329–338 (2017). https://doi.org/10.1016/j.ymssp.2016.08.020
C. Lin, S. Sun, P. Walker, N. Zhang, Applied sciences off-line optimization based active control of torsional oscillation for electric vehicle drivetrain. Appl. Sci. (2017). https://doi.org/10.3390/app7121261
C. Lin, S. Sun, W. Jiang, Active anti-jerking control of shifting for electric vehicle driveline. Energy Procedia 104, 348–353 (2016). https://doi.org/10.1016/j.egypro.2016.12.059
D. Yin, J. Wang, J. Du, G. Chen, J.S. Hu, A new torque distribution control for four-wheel independent-drive electric vehicles. Actuators (2021). https://doi.org/10.3390/act10060122
C. Rossi, D. Pontara, M. Bertoldi, D. Casadei, “Two-motor, two-axle traction system for full electric vehicle”, EVS 2016–29th Int. Electr. Veh. Symp. 8, 25–39 (2016)
K.J. Figel, M. Schultalbers, F. Svaricek, Experimental analysis of driveline shuffle with focus on the interaction between traction and torsional vibrations. IFAC-PapersOnLine 52(5), 322–328 (2019). https://doi.org/10.1016/j.ifacol.2019.09.052
K. B, G. D, J. Paul, S. R, G. Jamadade, Analysis of automotive transmission gearbox synchronizer wear due to torsional vibration and the parameters influencing wear reduction. Eng. Fail. Anal. 105, 427–443 (2019). https://doi.org/10.1016/j.engfailanal.2019.06.084
V. Migal, A. Lebedev, M. Shuliak, E. Kalinin, S. Arhun, V. Korohodskyi, Reducing the vibration of bearing units of electric vehicle asynchronous traction motors. JVC/J. Vib. Control (2020). https://doi.org/10.1177/1077546320937634
R. Zhang, C. Tong, Torsional vibration control of the main drive system of a rolling mill based on an extended state observer and linear quadratic control. JVC/J. Vib. Control 12(3), 313–327 (2006). https://doi.org/10.1177/1077546306063224
P. Templin, B. Egardt, An LQR torque compensator for driveline oscillation damping. Proc. IEEE Int. Conf. Control Appl. (2009). https://doi.org/10.1109/CCA.2009.5281020
K. Chen, J. Hu, Z. Peng, Analysis of torsional vibration in an electromechanical transmission system. Adv. Mech. Eng. 8(6), 1–9 (2016). https://doi.org/10.1177/1687814016650582
R.S. Vadamalu, C. Beidl, MPC for active torsional vibration reduction of hybrid electric powertrains. IFAC-PapersOnLine 49(11), 756–761 (2016). https://doi.org/10.1016/j.ifacol.2016.08.110
D. Song et al., Traction control–integrated energy management strategy for all-wheel-drive plug-in hybrid electric vehicle. Adv. Mech. Eng. 9(12), 1–18 (2017). https://doi.org/10.1177/1687814017747157
X. Zhang, H. Liu, C. Yinqi, Active damping of torsional vibration on the powertrain of power-split vehicle. Energy Procedia 105, 2898–2903 (2017). https://doi.org/10.1016/j.egypro.2017.03.652
S. Arhun, V. Migal, A. Hnatov, S. Ponikarovska, A. Hnatova, S. Novichonok, Determining the quality of electric motors by vibro-diagnostic characteristics. EAI Endorsed Trans. Energy Web (2018). https://doi.org/10.4108/eai.13-7-2018.164101
H. Yonezawa, I. Kajiwara, C. Nishidome, S. Hiramatsu, M. Sakata, T. Hatano, Vibration control of automotive drive system with backlash considering control period constraint. J. Adv. Mech. Des. Syst. Manuf. 13(1), 1–16 (2019). https://doi.org/10.1299/jamdsm.2019jamdsm0018
F. Wang, J. Zhang, X. Xu, Y. Cai, Z. Zhou, X. Sun, New teeth surface and back (TSB) modification method for transient torsional vibration suppression of planetary gear powertrain for an electric vehicle. Mech. Mach. Theory 140, 520–537 (2019). https://doi.org/10.1016/j.mechmachtheory.2019.06.018
F. Wang, J. Xia, X. Xu, Y. Cai, Z. Zhou, X. Sun, New clutch oil-pressure establishing method design of PHEVs during mode transition process for transient torsional vibration suppression of planetary power-split system. Mech. Mach. Theory 148, 103801 (2020). https://doi.org/10.1016/j.mechmachtheory.2020.103801
Y. Wang, X. Qin, S. Huang, S. Deng, Design and analysis of a multi-stage torsional stiffness dual mass flywheel based on vibration control. Appl. Acoust. 104, 172–181 (2016). https://doi.org/10.1016/j.apacoust.2015.11.004
H. Kojima, K. Kunugi, P.M. Trivailo, Cluster filtering/control of bending/torsional vibrations of a tape tether using smart-film sensors/actuators. Acta Astronaut. 123, 213–226 (2016). https://doi.org/10.1016/j.actaastro.2016.03.022
X. Chen, H. Wei, T. Deng, Z. He, S. Zhao, Investigation of electromechanical coupling torsional vibration and stability in a high-speed permanent magnet synchronous motor driven system. Appl. Math. Model. 64, 235–248 (2018). https://doi.org/10.1016/j.apm.2018.07.030
Y. Bian, Z. Gao, J. Hu, M. Fan, A semi-active control method for decreasing longitudinal torsional vibration of vehicle engine system: theory and experiments. J. Sound Vib. 439, 413–433 (2019). https://doi.org/10.1016/j.jsv.2018.09.051
D. Hoffmeyer, J. Høgsberg, Damping of coupled bending-torsion beam vibrations by spatially filtered warping position feedback. J. Sound Vib. 477, 115323 (2020). https://doi.org/10.1016/j.jsv.2020.115323
P. Múčka, International roughness index thresholds based on whole-body vibration in passenger cars. Transp. Res. Rec. 2675(1), 305–320 (2020). https://doi.org/10.1177/0361198120960475
A.S. Soosairaj, A. Kandavel, Ride comfort analysis of driver seat using super twisting sliding mode controlled magnetorheological suspension system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 235(14), 3606–3618 (2021). https://doi.org/10.1177/09544070211008763
Z. Zhang, D. Pan, W. Wu, C. Huang, Vibration source identification of a heavy commercial vehicle cab based on operational transfer path analysis. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 234(2–3), 669–680 (2020). https://doi.org/10.1177/0954407019854608
I.J.H. Tiemessen, C.T.J. Hulshof, Low back pain in drivers exposed to whole body vibration : analysis of a dose—response pattern. Occup. Environ. med. (2008). https://doi.org/10.1136/oem.2007.035147
R. Kumar, R. Sharma, V. Kumar, A.A. Khan, Predictors of whole-body vibration exposure among Indian bus and truck drivers. J. Phys. Conf. Ser. 1, 2021 (1854). https://doi.org/10.1088/1742-6596/1854/1/012033
M. Cardinale, M.H. Pope, The effects of whole body vibration on humans : Dangerous or advantageous ? Acta Physiol. Hungarica 90(3), 195–206 (2003)
Y. Qin, X. Tang, T. Jia, Z. Duan, J. Zhang, Y. Li, Noise and vibration suppression in hybrid electric vehicles : state of the art and challenges. Renew. Sustain. Energy Rev. (2020). https://doi.org/10.1016/j.rser.2020.109782
S. Lu, C. Liu, C. Lee, Y. Lin, International journal of industrial ergonomics vertical vibration frequency and sitting posture effects on muscular loads and body balance. Int. J. Ind. Ergon. (2019). https://doi.org/10.1016/j.ergon.2019.102860
G.S. Paddan, M.J. Griffin, Evaluation of whole-body vibration in vehicles. J. Sound Vib. 253(1), 195–213 (2002). https://doi.org/10.1006/jsvi.2001.4256
J.H. Kim, J.T. Dennerlein, P.W. Johnson, The effect of a multi-axis suspension on whole body vibration exposures and physical stress in the neck and low back in agricultural tractor applications. Appl. Ergon. (2016). https://doi.org/10.1016/j.apergo.2017.10.021
Q. Wang, K. Rajashekara, Y. Jia, J. Sun, A real-time vibration suppression strategy in electric vehicles. IEEE Trans. Veh. Technol. 66(9), 7722–7729 (2017). https://doi.org/10.1109/TVT.2017.2688416
J.H. Kim, L.S. Marin, J.T. Dennerlein, Evaluation of commercially available seat suspensions to reduce whole body vibration exposures in mining heavy equipment vehicle operators. Appl. Ergon. 71, 78–86 (2018). https://doi.org/10.1016/j.apergo.2018.04.003
T. Karikomi, K. Itou, T. Okubo, S. Fujimoto, Development of the shaking vibration control for electric vehicles. SICE-ICASE Int. Jt. Conf. (2006). https://doi.org/10.1109/SICE.2006.315138
C. Li, S. Zuo, Vibration characteristic analysis and optimization of the rear suspension of eccentrical motor driven electric vehicle. SAE Tech. Pap. (2013). https://doi.org/10.4271/2013-01-0088
H. Fu, C. Feng, S. Xue, Vibration suppression control of an integrated powertrain of electric and hybrid vehicles using LQR controller and reduced-order observer. IEEE Transp. Electrif. Conf. Expo. (2014). https://doi.org/10.1109/ITEC-AP.2014.6940733
Z. Song, J. Li, Z. Shuai, L. Xu, M. Ouyang, Fuzzy logic torque control system in four-wheel-drive electric vehicles for active damping vibration control. Int. J. Veh. Des. 68(1–3), 55–80 (2015). https://doi.org/10.1504/IJVD.2015.071068
S.A. Adam, N.A.A. Jalil, Vertical suspension seat transmissibility and seat values for seated person exposed to whole-body vibration in agricultural tractor preliminary study. Procedia Eng. 170, 435–442 (2017). https://doi.org/10.1016/j.proeng.2017.03.070
D. Tan, F. Song, Q. Wang, Design and optimization of the in-wheel motor driving electric vehicle based on the vibration energy transmission. JVC/J. Vib. Control 24(21), 5129–5140 (2018). https://doi.org/10.1177/1077546317745255
R. Guo, M.J. Wang, Active control of hybrid electric vehicle launch vibration in pure electric mode. JVC/J. Vib. Control 24(4), 673–681 (2018). https://doi.org/10.1177/1077546316648811
M. Zeng, B. Tan, F. Ding, B. Zhang, H. Zhou, Y. Chen, An experimental investigation of resonance sources and vibration transmission for a pure electric bus. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 234(4), 950–962 (2020). https://doi.org/10.1177/0954407019879258
S. Wang, L. Hua, X. Han, Z. Su, Reliability-based design optimization for vertical vibrations of a modified electric vehicle using fourth-moment polynomial standard transformation method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. (2020). https://doi.org/10.1177/0954407020907488
M. Liu, Y. Zhang, J. Huang, C. Zhang, Optimization control for dynamic vibration absorbers and active suspensions of in-wheel-motor-driven electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. (2020). https://doi.org/10.1177/0954407020908667
Y. Lei, L. Hou, Y. Fu, J. Hu, W. Chen, Research on vibration and noise reduction of electric bus gearbox based on multi-objective optimization. Appl. Acoust. 158, 107037 (2020). https://doi.org/10.1016/j.apacoust.2019.107037
R. Fan, G. Meng, J. Yang, C. He, Experimental study of the effect of viscoelastic damping materials on noise and vibration reduction within railway vehicles. J. Sound Vib. 319(1–2), 58–76 (2009). https://doi.org/10.1016/j.jsv.2008.03.071
J.S. Chen, Vibration reduction in electric bus during acceleration and gear shifting. Adv. Mech. Eng. 7(3), 1–16 (2015). https://doi.org/10.1177/1687814015575992
J. Park, J. Lee, S. Ahn, W. Jeong, Reduced ride comfort caused by beating idle vibrations in passenger vehicles. Int. J. Ind. Ergon. 57, 74–79 (2017). https://doi.org/10.1016/j.ergon.2016.12.003
W. Hou, Y. Li, Y. Zheng, W. Guo, Multi-frequency energy harvesting method for vehicle induced vibration of rail transit continuous rigid bridges. J. Clean. Prod. 254, 119981 (2020). https://doi.org/10.1016/j.jclepro.2020.119981
S. Li, X. Feng, Study of structural optimization design on a certain vehicle body-in-white based on static performance and modal analysis. Mech. Syst. Signal Process. 135, 106405 (2020). https://doi.org/10.1016/j.ymssp.2019.106405
N. Liu, Y. Sun, Y. Wang, P. Sun, W. Li, H. Guo, Mechanism of interior noise generation in high-speed vehicle based on anti-noise operational transfer path analysis. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 235(1), 273–287 (2021). https://doi.org/10.1177/0954407020937219
L. Hou, Y. Lei, Y. Fu, J. Hu, Effects of lightweight gear blank on noise, vibration and harshness for electric drive system in electric vehicles. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 234(3), 447–464 (2020). https://doi.org/10.1177/1464419320915006
G. Marbjerg, Noise from electric vehicles. Vejdirektoratet 537, 48 (2013)
K. Genuit, The new sounds of electric vehicles—Quieter but really better? J. Acoust. Soc. Am. 141(5), 3876–3876 (2017). https://doi.org/10.1121/1.4988671
L.M. Iversen, R.S.H. Skov, Measurement of noise from electrical vehicles and internal combustion engine vehicles under urban driving conditions. Euronoise 2015, 2129–2134 (2015)
Z. Xitong, Z. Wenjuan, M. Jingyao, Analysis on influencing factors of urban road traffic noise and its control. IOP Conf. Ser. Earth Environ. Sci. (2020). https://doi.org/10.1088/1755-1315/512/1/012044
Funding
Open access funding provided by Manipal Academy of Higher Education, Manipal.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Krishna, K., Mahesha, G.T., Hegde, S. et al. A Review on Vibrations in Electric and Hybrid Electric Vehicles. J. Inst. Eng. India Ser. C 104, 423–438 (2023). https://doi.org/10.1007/s40032-023-00930-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40032-023-00930-3