
Abstract
A decision support system with damage stability analysis has been recognized as an important tool for passenger ships. Various software applications have been developed and taken into use over the years, without a direct link to any compelling requirement, set forth in the international regulatory framework. After the Costa Concordia accident, new regulations have been established, setting minimum requirements for a decision support system, as an extension to a loading computer. Yet, more advanced systems have been developed recently, aiming at providing valuable additional information on the predicted development of the stability of the damaged ship. This paper presents these alternative decision support systems with damage stability analysis methods for flooding emergencies on passenger ships. The technical background, usability, and usefulness of the various approaches are compared and discussed, taking into account the important statutory approval point of view. In addition, practical examples, including past accidents, are presented and discussed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
An important strategy to reduce the disaster potential of maritime accidents is to enhance post-accident situational awareness and related decision making, Goerlandt et al. (2016). Rapid and correct decisions onboard are needed, especially in the case of a flooding accident of a passenger ship. The situation may evolve fast, leaving the crew with a short time frame for appropriate actions. Decisions on evacuation, abandonment, and possible counter actions need to be based on predicted time frame and evolvement of the scenario. Consequently, a dedicated decision support system is an essential tool in a distressed accident situation. The grounding and subsequent capsizing of the Costa Concordia in 2012 further emphasized this need. Alternative solutions for such systems have been developed both for use onboard the flooded ship and in a shore-based support center. A brief overview of this progress was given by Pennanen et al. (2017). The present study further elaborates the implications of the alternative methods for both onboard and shore-based decision support, accounting for the latest research and development, both from technical and regulatory perspectives.
One of the first concepts for a decision support in flooding accidents was outlined by Lee et al. (2005), including a suggestion for color-coding of damage stability characteristics. More advanced user experience through a virtual environment for decision support was introduced by Varela and Guedes Soares (2007), focusing on the visualization of both the flooding and relevant equipment for damage control. Ölcer and Majumder (2006) presented a case-based reasoning, using a large number of pre-calculated damage scenarios and an algorithm to select the closest one to the actual condition. More recently, also Kang et al. (2017) have proposed using pre-calculated time-domain simulation results in a decision support system.
Excessive heeling of the ship complicates the evacuation process, as described, e.g., by Bles et al. (2002), and may even prevent the launching of the lifeboats. Moreover, heeling increases the risk of capsizing, and consequently, already Lee et al. (2005) emphasized the heel angle as a critical parameter for decision support. Thereafter, research has focused on planning optimal counter ballasting actions to reduce heeling, for example Lee (2006); Martins and Lobo (2011); Calabrese et al. (2012); Choi et al. (2014); and Hu et al. (2015). These tools have mainly been developed for navy ships. However, in military applications, the main objective is to maintain the functionality of the weapon systems, whereas for passenger ships, the target is to ensure survivability of the people onboard the damaged ship. Consequently, the needs for the decision support system are also somewhat different. Yet, there are also similarities, such as the objective to minimize heeling.
An advanced monitoring tool, informing the crew about the current vulnerability status of the ship, was introduced by Jasionowski (2011). Most notably, this approach was shown to improve the awareness of the crew, aiding decision-making in case of a flooding accident. In a distress situation, the available information on the flooding extent and damage stability of the ship is essential, and for example Varela et al. (2014), emphasize the need to provide the crew with prediction of the progression of flooding.
During the past decade, several time-domain flooding simulation tools have been developed, such as Jasionowski (2001); Ruponen (2007); Dankowski (2013); Lee (2015); and Ypma and Turner (2019), enabling calculation of flooding progression in the complex arrangement of compartments and openings of a large passenger ship. Typically, it is assumed that water levels in the flooded compartments are horizontal, and Bernoulli’s theorem is used to calculate the flow rates in the openings. With increased computing capacity, these simulation tools can also be used in onboard decision support applications. Initially, a simplified approach was introduced by Ruponen et al. (2012) for rapid assessment of flooding progression. However, later more accurate onboard simulation methods have been presented by Varela et al. (2014, 2015); Ruponen et al. (2015, 2017); and Braidotti and Mauro (2019). The main benefit of such tools is the capability to estimate the time frame for the evolvement of the scenario. Even if the ship eventually capsizes, there may still be enough time to carry out orderly evacuation and abandonment.
Quantification of the current safety level, accounting for the results of the flooding prediction and possible manual user input, needs to be included in a decision support system (DSS). Usually, simple criteria for stability characteristics are applied, as presented, e.g., by Lee et al. (2005). However, other factors, such as the weather condition and available systems, can also be included in this assessment. Recently, Braidotti et al. (2018) have considered integration of all aspects of ship survivability into a global risk index, and an overview of recent developments in ship stability and operational risk is provided in Manderbacka et al. (2019).
A fundamental aspect of decision support is the communication between all stakeholders, such as shore-based support and search and rescue (SAR) personnel. For this purpose, an elaborate Vessel TRIAGE system, providing means of communicating the status of the situation, has been developed, Nordström et al. (2016). Analogically to the widely used medical TRIAGE, the severity of the situation is displayed with color codes: green, yellow, red, and black, Table 1. Combined with damage stability calculation in time-domain, the Vessel TRIAGE system forms a solid background to an effective and useful decision support system.
Various active counter measures can also be included in the decision support framework, as described in Boulougouris et al. (2016). Recently, e.g., Kang et al. (2018) have considered a concept of buoyancy support system. However, if all factors are not known and properly accounted for in the decision making, such counter measures may also have a negative impact on the stability and survivability of the damaged ship. For example, incorrectly applied buoyancy support system may increase the asymmetry of flooding and risk of capsizing.
The main consequences of flooding are decreased freeboard and reduced stability. The crew of the damaged passenger ship needs to react promptly and decide on mustering and possible abandonment of the ship. Disorderly evacuation and abandonment can also cause casualties and serious injuries. Therefore, if the ship will remain afloat with sufficient reserve stability, there is no need for immediate evacuation. On the other hand, if the ship will capsize, a delayed start of evacuation is likely fatal. Ockerby (2001) points out the need to keep the passengers well informed on the facts of the situation, starting from the very first alarm, in order to avoid panic. These actions obviously require rapid assessment of the situation. Data from the automation system and advanced tools for analysis of the situation can enhance objectively the awareness of the situation and support the crew in the distressed situation.
For passenger ships, the loss of stability is usually caused by progressive flooding to undamaged compartments. The non-watertight structures, such as closed A-class fire doors, inside the watertight compartments can have a notable effect on the flooding progression. Typically, the closed doors leak and eventually collapse under a quite moderate pressure head of 2.0…3.5 m, Jalonen et al. (2017). For example, simply by closing all A-class fire doors, the time-to-sink can be prolonged by several hours in certain damage cases, Ruponen (2017). The actual status (open/closed) of these doors may be available from the automation system, and this data can be used for more accurate analysis of the flooding progression. Moreover, these previous studies point out that for passenger ships, there can be thousands of alternative ways for the same damage scenario to evolve, depending on the door statuses. Consequently, it is impossible to effectively consider all possible combinations in a decision support system that relies on pre-calculated results.
2 Alternative approaches for damage stability analysis in decision support
2.1 Regulatory requirements
The International Maritime Organization (IMO) has taken the decision that all passenger ships covered by the SRtP (Safe Return to Port) requirement and built after 2014, need to be equipped with a stability computer, capable of providing the master with operational information after a flooding casualty. Alternatively, a shore-based support proving the same can be used. The requirement is included in the amendments of the Safety of Life at Sea (SOLAS) text, and relevant detailed guidelines are given in MSC Circulars 1400 and 1532 (IMO 2011, 2016). In its 99th session, the IMO Maritime Safety Committee (MSC) extended this requirement to concern also existing passenger ships built before 2014, in the SOLAS edition entering in force January 1, 2020. The relevant guideline, which takes into account the characteristics of older tonnage, is MSC Circular 1589 (IMO 2018). A comprehensive description of the regulatory background is given in Hutchinson and Scott (2015).
In the amended SOLAS text, MSC.436(99), the relation of these guidelines is clarified, meaning that the Circular 1400 only affects ships built between January 1, 2014 and May 13, 2016, whereas the revised circular 1532 affects ships built after May 13, 2016. The latest circular 1589 affects only existing ships, built before January 1, 2014.
It is noted that the ships built before 2014 represent a vast majority of different passenger ships in operation. According to Equasis (2018), over 90% of all passenger ships over 500 GT are older than 5 years. These include both pure passenger ships and ro-ro/passenger (RoPax) vessels, covered by many editions of SOLAS conventions in use at the time of their construction.
2.2 Flooding detection
An essential aspect of decision support in an accident situation is fast and reliable flooding detection. New passenger ships are equipped with sensors IMO (2008). An adequate number of well-placed flood level sensors enable the calculation of time-domain flooding prediction, Takkinen et al. (2017). New ships usually have automation systems, capable to provide all needed data for the damage stability computer directly through various interfaces. On the contrary, the installation of the flood level sensors to older ships is complicated and costly.
Recently, Karolius et al. (2018) have introduced a risk-based positioning of flooding detection sensors. Such an approach may be very useful for designing the instrumentation for new passenger ships. Yet, it is of utmost importance that all watertight compartments are equipped with sensors, even if the risk of flooding is very small. Otherwise, there may be a notable delay in the flooding detection and subsequent alarm.
Trincas et al. (2017) suggest that flooding could be detected only on the observed change in the floating position of the ship. In ideal conditions, this could be used to trigger alarm on possible flooding, but it is considered to be extremely difficult to obtain reliable assessment of the real damage case without proper flooding detection sensors in the compartments. Mainly because the same change in the floating position may result from several different combinations of flooded compartments and breaches. Consequently, manual user input from the crew will be needed if there is no flooding detection in the compartments.
2.3 Overview of alternative approaches
The conventional approach for damage stability assessment onboard is to calculate the final equilibrium after flooding based on the current loading condition. In practice, loading computer software, relying on static damage stability method, is used for this purpose. International Association of Classification Societies (IACS) defines four different types of stability software, Table 2, in the Unified Regulations regarding Onboard Computers for Stability Calculations, IACS (2017). In principle, only Type 4 can be considered as a decision support tool.
More recent developments of onboard software include time-domain prediction of damage stability, as presented in Varela et al. (2014, 2015); Ruponen et al. (2015, 2017); Trincas et al. (2017); and Braidotti and Mauro (2019). Such solutions have already been installed on new passenger ships for better operational information of damage stability, and for providing time perspective of the evolution of the stability for enhanced decision support.
An alternative to an onboard stability computer is to utilize a shore-based support center, IMO (2016). Further recommendations have been outlined in IACS (2016). Some practical aspects and applied tools are described in Peiris et al. (2015), noting that it is important to establish the condition of the ship immediately before the casualty. Therefore, swift communication between the shore-based support system and onboard loading computer, and possible decision support system, is essential.
The importance of rapid assessment of the situation, and especially the communication to the passengers, was emphasized by Ockerby (2001). According to IMO (2016): “the shore-based support should be operational within one hour (i.e. with the ability to input details of the condition of the ship)”. In practice, this is likely initiated much faster. However, the response time from the shore-based support will inevitably cause some delay in getting the first damage stability results. Therefore, use of onboard system for rapid assessment can be considered as the preferred option. However, if the situation is prolonged, the stability experts in the shore-based support may be able to give valuable assistance, e.g., related to possible counter actions.
2.4 Static damage stability analyses
The loading computers, including Type 4 (see Table 2), are based on static stability assessment. Most of the large passenger ships in operation are equipped with software, where the user has a possibility for manual definition of damaged rooms and compartments. In the stability calculations, these rooms are treated as lost buoyancy, Ruponen et al. (2018). Such a system is utilizing a 3-D model of the ship, and it can calculate the final equilibrium after flooding. In addition, there is usually a possibility to calculate a few artificial intermediate flooding stages.
The damaged stability calculations are based on the current loading condition, and for example, the tank filling levels are obtained from the automation system. However, since arbitrary damage cases can be defined, most commonly used systems differ from the direct damage analysis (IACS Type 3) loading computers that are by definition limited to rule-based deterministic damage cases (e.g., SOLAS 74/90). In principle, the Type 3 software are mainly suitable for checking the compliance to the relevant damage stability regulations before sailing, especially for tankers, where MARPOL compliance needs to be confirmed for the actual loading condition. However, for passenger ships, the regulatory compliance can be achieved also by using the GM (metacentric height) limiting curves with IACS Type 2 software.
A real damage to the ship is naturally deterministic, having an exact size, shape, and location. The actual case is always different from any case that was included in the regulatory damage stability calculations (e.g., one or two compartment damages). In principle, this fact rules out systems that are based on pre-calculated damage scenarios. Especially, for passenger ships, the number of scenarios would be infinite because of the effects of the internal structures. Consequently, it is important that the calculations are based on the real, current loading condition, as emphasized in the guidelines (MSC Circulars 1400, 1532, and 1589).
The results of damage stability calculation are traditionally presented in the form of a righting lever (GZ) curve. In addition, deterministic stability criteria for the characteristics of this curve are presented, as presented in Fig. 1. Based on the GZ curve, and some knowledge of the ship, an experienced master (onboard) or a naval architect (shore-based support) can estimate the severity of the flooding case. However, this data still needs to be combined with the information on the prevailing weather and geographic conditions, when making the decision to either evacuate and abandon the ship, or to proceed to the nearest port. Furthermore, the time to reach the equilibrium cannot be estimated. It may also be difficult to judge how the situation will evolve, for example, due to progressive flooding.

Example of typical damage stability output from a Type 4 Loading Computer; righting lever curve and various stability criteria
The regulatory texts, IMO (2011, 2016, 2018), contain very detailed specifications for the required output. It appears that these specifications are based on the damage stability calculations and analyses for design and approval, according to the relevant SOLAS editions. With the introduction of probabilistic damage stability analyses, special attention was paid on the immersion of escape routes, and subsequent nullification of the survivability in such a case. However, damage stability analyses in a real casualty differ significantly from the design stage calculations. For example, the immersion angle of an escape route provides no relevant information to decision making onboard a damaged ship. Instead, the predicted development of progressive flooding and stability, along with the resulting estimate of the available time for evacuation can be considered much more relevant information for decision support.
2.5 Time-domain damage stability prediction
An advanced approach to decision support is to use time-domain flooding simulation, as presented in Varela et al. (2014); Ruponen et al. (2015, 2017); and Braidotti and Mauro (2019). In general, the process of such a DSS contains three elements:
Flooding detection and assessment of damage extent
Time-domain simulation for prediction of flooding progression
Analysis of safety level based on the calculation results
A concept for a decision support system, focusing on both user experience and efficient calculations, was introduced in Pennanen et al. (2015) and elaborated in Ruponen et al. (2015). The detailed process of this DSS is illustrated in Fig. 2. When flooding is detected by the sensors, first the breach size and location are assessed automatically, as presented in Ruponen et al. (2017). Constant volumes of floodwater are used for calculation of the GZ curve, Ruponen et al. (2018). Finally, based on the estimated breaches, progressive flooding and quasi-static ship motions for the next 3-h period are calculated in time-domain, and the Vessel TRIAGE color code is evaluated based on the prediction results.

Flowchart for breach assessment and time-domain flooding prediction for decision support onboard a damaged ship
A key feature of the DSS is that the results are constantly updated, using the latest measurement data from the automation system. Consequently, also progressive flooding through unknown openings can be detected and accounted for in the subsequent predictions, as demonstrated in Ruponen et al. (2017).
3 Available time frame in decision support
3.1 Overview of real accidents
The evolution of the scenario, including flooding progression and ship motions, can have a significant impact on evacuation and abandonment of the damaged ship. The actual available time frame, from the time of the accident to the point, where orderly evacuation and abandonment is not possible, is listed in Table 3 for some notable passenger ship flooding accidents. The data is based on the accident investigation reports and publications. For pure passenger ships, the available time frame may be over 10 h, allowing for detailed assessment of possible counter actions with the help from the shore-based support. The grounding of the Sally Albatross in 1994, MoJF (1996), is a good example of such actions. The stability experts ashore concluded that the stability was critical, and the ship was safely towed to shallow water in order to prevent sinking or capsizing. Despite of the very extensive damage to the ship, everyone was safely evacuated, and eventually also the ship was re-floated and repaired.
On the other hand, if the time frame is very narrow, as in the case of the Costa Concordia, there may not be time to activate the shore-based support, and swift actions need to be taken by the crew, using loading computer and onboard decision support system for damage stability analyses.
In the European Gateway accident, the flooding of the main vehicle deck and transient flooding resulted in very rapid loss of stability, Spouge (1986), leaving no time for orderly evacuation and abandonment. In such situation, even an advanced decision support system is of little use.
3.2 Case study A—long raking damage
3.2.1 Damage scenario
The implications of alternatives for decision support are demonstrated with a 125,000 gross tonnage passenger ship design, Kujanpää and Routi (2009). The first studied damage scenario is a long and narrow raking breach near the waterline. In real life, this could be caused by ice or side grounding. The breach extends over seven watertight (WT) compartments, including both main engine rooms, Fig. 3. The ship will eventually capsize, but the flooding takes several hours.

Raking damage near water line with the breach extending to seven WT compartments
The reference results for the progression of flooding and ship motions are calculated in calm water with time accurate simulation, Ruponen (2014). The applied time step is short (1.0 s) in order to minimize the numerical error. The reference simulation results were also used to generate the measurement signals for the level sensors. Here, a sampling frequency of 0.25 Hz was assumed. The applied methodology is described in Ruponen et al. (2017).
The ship is equipped with level sensors for flooding detection. All of these sensors are considered as fully operational, and thus providing the onboard system with the up-to-date information on the progression of flooding. The floodwater does not immediately reach the sensors in all damaged compartments, but about 10 min after damage, flooding is detected in all breached WT compartments.
3.2.2 Flooding prediction results
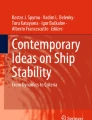
The applied method for assessment of the breach size and location and analysis of progression of flooding are described in detail in Ruponen et al. (2017). Examples of the results from time-domain flooding prediction are presented in Fig. 4. Predictions are calculated for the next 3 h with a constant time step of 30 s. The implicit time integration of the applied pressure-correction method ensures numerical stability, Ruponen (2007). However, this also means that the results are not as accurate as with a short time step.

Time-domain flooding prediction results for the small but extensive breach, Case A
The first prediction is started immediately after flooding has been detected and the breach size and location is assessed. The results of the first prediction indicate a transient heeling that is soon equalized to a steady equilibrium. A couple of minutes later, flooding has been detected in new WT compartments, and the second prediction reveals that the transient heel angle is much larger and progressive flooding continues during the 3-h prediction. Thereafter, predictions are frequently updated, and the results show slow but extensive progressive flooding with a small heel angle, see, e.g., the 40th prediction in Fig. 4. The development of heel angle is predicted qualitatively rather well, but with a long time step, the prediction onboard cannot capture the details of the flooding progression. However, the achieved accuracy is considered to be more than sufficient for decision support purpose.
About 160 min (2 h 40 min) after the damage, the 52nd prediction reveals that the heel angle will eventually start to increase notably, with an obvious risk of capsizing. However, the heel angle is predicted to remain under 5° for about 2 h, and consequently, there should be sufficiently time for orderly evacuation and abandonment. Eventually, about 285 min (4 h 45 min) after the damage, the 93rd prediction indicates that the ship will capsize within the next 3 h. The predicted time-to-capsize is somewhat faster than in reality, but the qualitative behavior is correctly captured, also with the subsequent updates, e.g., the 135th prediction.
Not all flooded rooms are equipped with a level sensor, and therefore, the results of the previous flooding prediction must be used to get a reasonable estimate of the amount of floodwater for the initial condition of the subsequent prediction. Consequently, in this particular damage case, the inaccuracies in the initial volumes of floodwater result in a small “peak” in the heel angle in the beginning of most predictions Fig. 4.
The key components of a decision support system with time-domain prediction of progressive flooding are visualized in Fig. 5. The main output is the Vessel TRIAGE color code and extent of flooding. For detailed analysis, a time line of critical events and prediction of heel angle can be viewed.

Key components of a decision support system with time-domain prediction of flooding
3.2.3 Loading computer results
A Type 4 loading computer indicates the detected flooding, and the user can also manually indicate additional damaged compartments. The final equilibrium condition is calculated by considering the damaged compartments as lost buoyancy. In addition, typically five intermediate stages of flooding are calculated. It should be emphasized that these artificial stages do not reflect the actual progress of flooding.
In the studied damage scenario, the ship capsizes during the intermediate flooding, and the last stable floating position for the third stage is shown in Fig. 6. In any case, the loading computer can only calculate the final condition and a number of intermediate stages, but the time line of events cannot be evaluated.

Example of damage stability results from a loading computer with Type 4 functionality
3.3 Case study B—collision damage
The second studied damage scenario is a two-compartment collision damage in the aft part of the same large passenger ship, Fig. 7. The starboard side electric motor room is penetrated, causing asymmetric flooding due to longitudinal WT bulkhead that separates the intact PS motor room. The breach in the aft damaged compartment is very small, and it takes about 3 min before the water level reaches the sensor. Therefore, the first prediction is started assuming only flooding of the forward damaged WT compartment, Fig. 8. A couple of minutes later, all breaches are correctly detected, and the second prediction provides qualitatively good results. The third prediction provides very accurate results also for the final steady heel angle.

Collision damage scenario, Case B

Time-domain flooding prediction results for the two-compartment collision damage, Case B
For this kind of damage scenario with a stable final equilibrium position, a Type 4 loading computer could also provide very useful results. However, a time-domain analysis gives more detailed information, including the time-to-flood and stability during the flooding process. Moreover, floodwater can accumulate due to heeling during the flooding process, and hence there may be some difference in the final equilibrium condition if the accumulated water is trapped in the compartments when heeling equalizes. This phenomenon explains the small difference in the final steady heel angle between the second and third prediction in Fig. 8.
3.4 Analysis of the case study results
In the case A, both the static analysis with a Type 4 loading computer and the time-domain flooding prediction indicate that the situation is extremely serious, and eventually the ship will sink or capsize. For an experienced master, this would be obvious already based on the extent of flooding. However, the major benefit of the time-domain flooding prediction is the estimate of the time-to-sink. In this damage scenario, there is plenty of time for orderly evacuation and abandonment. Furthermore, assistance from the nearby ships can be waited for. The flooding is very slow, and therefore, active counteractions, such as pumping, could be used to further increase the available time.
Flooding and eventual capsize of the ship in the case A, takes nearly 9 h. However, the results obtained from the static loading computer give an impression of a more severe situation, simply indicating the extent of damage and loss of stability due to flooding. The lack of information on the time line of the flooding process may lead to rushed evacuation actions and panic. However, it is important to note that in some other damage scenario, the situation may evolve in a faster pace, so that swift actions are necessary, immediately when flooding is detected. In all cases, the immediate results from the time-domain simulation are considered to be very valuable.
For a damage case, where a stable equilibrium position is reached, such as the case B, the differences between the alternative decision support tools are less obvious. In practice, both a Type 4 loading computer and a time-domain flooding prediction tool will give the same final condition. However, the additional information on realistic flooding progression can be very useful, for example, in planning of active counter measures, such as pumping.
4 Discussion
The IMO Circ. 1532, IMO (2016), states that the “shore-based support should be operational within one hour”. In practice, the gathering of the information of the situation may take a substantial amount of time. After this, with a full awareness of the situation, the shore-based support will be able to provide results on the evolution of the situation and possible recommended actions. In a serious damage case, this means that the decision for evacuation and abandonment may be critically delayed. Considering this aspect, an onboard decision support system, including automatically launched time-domain prediction of progressive flooding, would appear very useful supplement to the loading computer and shore-based support.
An essential aspect of onboard stability computers is the statutory approval. In practice, this is conducted by the classification societies, and for example, DNV GL (2018) defines an additional class notation LCS (DC) “loading computer system – damage control” for static damage stability onboard calculation. This definition exceeds the IMO Circular 1532 requirements. In the future, it should be discussed, if also time-domain prediction-based systems could be checked and approved by the classification societies.
Automatic breach assessment, based on flood level sensor data, combined with time-domain prediction of progressive flooding can provide valuable information to both the crew of the damaged ship and possible shore-based support center. However, it is crucial to acknowledge that all decision support systems are always based on the available data, and consequently inaccuracies in the 3-D model of the ship or a broken sensor may have a significant effect on the results. Therefore, all output from any decision support system should be critically reviewed, accounting for all available information, including visual observations.
5 Conclusions
Considering the pace of evolvement of some flooding accidents, such as the Costa Concordia case (MIT 2013), it is utmost important that there is a system onboard the ship, capable of giving immediate alert, as well as rapid view of the severity and progress of the scenario. A loading computer-based system provides only an estimation of the situation at the end of the flooding process, and the evaluation of the severity may require expert level interpretation of the results. This kind of system is also suitable for training and drills, as it provides the user with understanding of the extent and type of damages the ship eventually can or cannot survive.
The available floodwater level sensor data and time-domain prediction of the flooding scenario can be utilized in the decision making process through a novel decision support system. Getting the time line view of the damage scenario is considered very valuable in the distress situation. The assessment of severity of the flooding accident can be based on the evolvement of the events, which can be easily communicable to all stakeholders, according to the Vessel TRIAGE concept. In order to keep the loading computer functional for its primary purpose for planning and checking the loading condition for rule compliance, the time-domain prediction should run as a separate, dedicated decision support system. This separate system can also be complemented with other safety-related functions, like vulnerability monitoring, without causing problems in the class approval of the loading computer.
Although there is inevitably some delay in the response from a shore-based support team, the expert assistance to the crew of the ship can be very valuable. For example, detailed assessment of alternative scenarios and possible counter actions can be done by the support team, and recommendations on best actions can be provided to the crew. Consequently, the onboard and shore-based decision support alternatives are in fact complementary.
In order to increase maritime safety, all passenger ships should be equipped with a loading computer that is capable of performing damage stability analysis onboard. In addition to this, shore-based support should be provided for increased safety and redundancy. For new ships, with properly located functional level sensors, a decision support system with time-domain flooding prediction would provide valuable additional information. Whatever alternative for damage stability assessment is selected, it is important that the crew is familiar with the system, especially regarding the limitations and applied assumptions. Consequently, frequent use of the system during the emergency drills is highly encouraged.
The development prospects include linking onboard and shore-based support tools through dedicated interfaces. More effort is also needed on the reliable quantification of the survivability level as a reliable measure for color coding according to the Vessel TRIAGE system. However, also the presently available tools for time-domain assessment of progressive flooding and damage stability are considered to provide very useful information for decision support in a distress situation.
References
Bahamas (1992) Report of the investigation into the collision with the trawler The Fu No. 51, followed by the subsequent flooding and sinking of Royal Pacific on 23 August 1992
Bles W, Nooy S, Boer LC (2002) Influence of ship listing and ship motions on walking speed. Springer Verlag, Pedestrian and Evacuation Dynamics, pp 437–452
Boulougouris E, Cichowicz J, Jasionowski A, Konovessis D (2016) Improvement of ship stability and safety in damaged condition through operational measures: challenges and opportunities. Ocean Eng 122:311–316. https://doi.org/10.1016/j.oceaneng.2016.06.010
Braidotti L, Mauro F (2019) A new calculation technique for onboard progressive flooding simulation, Ship Technology Research – Schiffstechnik 66:150–162. https://doi.org/10.1080/09377255.2018.1558564
Braidotti L, Prpić-Oršić J, Valčić M, Trincas G, Bucci V (2018). Fuzzy analytical hierarchical process to assess weights of importance in ship operation risk assessment. In: proceedings of the 19th international conference on ships and maritime research - NAV 2018. Trieste (Italy)
Calabrese F, Corallo A, Margherita A, Zizzari AA (2012) A knowledge-based decision support system for shipboard damage control. Expert Syst Appl 39:8204–8211. https://doi.org/10.1016/j.eswa.2012.01.146
Choi J, Lee D, Kang HJ, Kim S-Y, Shin S-C (2014) Damage scenarios and onboard support system for damaged ships. Int J Nav Archit Ocean Eng 6:236–244. https://doi.org/10.2478/IJNAOE-2013-0175
Dankowski H (2013). A fast and explicit method for simulating flooding and sinkage scenarios of ships, doctoral dissertation, Hamburg (Germany): Technischen Universität Hamburg. https://doi.org/10.15480/882.1125
DNV GL (2018) Rules for classification of ships, Part 6 Additional class notations, Chapter 4 Cargo operations, Edition July 2018
Equasis (2018) The World Merchant Fleet in 2017 - Statistics from Equasis, http://www.equasis.org/EquasisWeb/public/PublicStatistic
Goerlandt F, Nordström J, Ruponen P (2016) Enhancing SAR communication and decision making using vessel TRIAGE: concept and developments, Proceedings of the 6th International Maritime Conference on Design for Safety, Hamburg, Germany, 28-30 November 2016, pp. 11–16
Hu L-F, Tian Z, Sun Z, Zhang Q, Feng B (2015) Genetic algorithm-based counter-flooding decision model for damaged warship. Int Shipbuild Prog 62:1–15. https://doi.org/10.3233/ISP-140114
Hutchinson K, Scott A (2015) Current and possible future intact and damage stability passenger ship regulations, specially the provision of damage stability information and verification tools to the master, damaged ship III, Royal Institute of Naval Architects, 25–26 March 2015, London, UK
IACS (2016) Recommendation for the operation of shore-based emergency response services, IACS recommendation 145, May 2016. http://iacs.org.uk/download/1961
IACS (2017) Computer software for onboard stability calculations, UICS Unified Requirement L5 Rev3 CLN, 3 June 2017. http://iacs.org.uk/download/4196
IMO (2008) MSC.1/Circ.1291 – Guidelines for flooding detection systems on passenger ships, 9 December 2008
IMO (2011) MSC.1/Circ.1400 - Guidelines on operational information for masters of passenger ships for safe return to port by own power or under \tow, May 27, 2011
IMO (2016) MSC.1/Circ.1532 - Revised guidelines on operational information for masters of passenger ships for safe return to port, June 6, 2016
IMO (2018) MSC.1/Circ.1589 - guidelines on operational information for masters in case of flooding of passenger ships constructed before 1 January 2014, May 24, 2018
Jalonen R, Ruponen P, Weryk M, Naar H, Vaher S (2017) A study on leakage and collapse of non-watertight ship doors under floodwater pressure. Mar Struct 51:188–201. https://doi.org/10.1016/j.marstruc.2016.10.010
Jasionowski A (2001) An integrated approach to damage ship survivability assessment. PhD Thesis, The Ship Stability Research Centre, Department of Ship and Marine Technology, University of Strathclyde
Jasionowski A (2011) Decision support for ship flooding crisis management. Ocean Eng 38:1568–1581. https://doi.org/10.1016/j.oceaneng.2011.06.002
Kang HJ, Choi J, Yim G, Ahn H (2017) Time domain decision-making support based on ship behavior monitoring and flooding simulation database for on-board damage control. In: Proceedings of the International Offshore and Polar Engineering Conference. San Francisco (USA)
Kang HJ, Kim I, Choi J, Lee GJ, Park BJ (2018) A concept study for the buoyancy support system based on the fixed fire-fighting system for damaged ships. Ocean Eng 155:361–370. https://doi.org/10.1016/j.oceaneng.2018.02.040
Karolius, KB, Cichowicz J, Vassalos D (2018) Risk-based positioning of flooding sensors to reduce prediction uncertainty of damage survivability, Proceedings of the 13th International Conference on the Stability of Ships and Ocean Vehicles (STAB2018) 16–21 September 2018, Kobe, Japan
Kujanpää J, Routi A-L. (2009) Concept ship design a, FLOODSTAND deliverable D1.1a. http://floodstand.aalto.fi/Info/Files/deliverable_D1.1a_v03.pdf
LBMA (2009) Report of investigation in the matter of sinking of passenger vessel explorer (O.N. 8495) 23 November 2007 in the Bransfield Strait near the South Shetland Islands, Liberian Bureau of Maritime Affairs
Lee D (2006) Knowledge-based system for safety control of damaged ship. Knowledge Based Systems 19:187–191. https://doi.org/10.1016/j.knosys.2005.11.005
Lee GJ (2015) Dynamic orifice flow model and compartment models for flooding simulation of a damaged ship. Ocean Eng 109:635–653. https://doi.org/10.1016/j.oceaneng.2015.09.051
Lee D, Lee S-S, Park B-J, Kim S-Y (2005) A study on the framework for survivability assessment system of damaged ships. Ocean Eng 32:1122–1132. https://doi.org/10.1016/j.oceaneng.2004.10.019
Manderbacka T, Themelis N, Bačkalov I, Boulougouris E, Eliopoulou E, Hashimoto H, Konovessis D, Leguen J-F, Míguez González M, Rodríguez CA, Rosén A, Ruponen P, Shigunov V, Schreuder M, Terada D (2019) An overview of the current research on stability of ships and ocean vehicles: the STAB2018 perspective. Ocean Eng 186, Article 106090, pp. 1–16. https://doi.org/10.1016/j.oceaneng.2019.05.072
Martins PT, Lobo VS (2011) Real-time decision support system for managing ship stability under damage, proceedings of OCEANS 2011 IEEE, Spain. https://doi.org/10.1109/Oceans-Spain.2011.6003643
MIT (2013) Cruise ship Costa Concordia Marine casualty on January 13, 2012 – report on the safety technical investigation, Ministry of infrastructures and transports
MoJF (1996) Accident investigation report on the grounding of the m/s Sally Albatross, Ministry of Justice, Finland, 1996 (in Finnish)
Nordström J, Goerlandt F, Sarsama J, Leppänen P, Nissilä M, Ruponen P, Lübcke T, Sonninen S (2016) Vessel TRIAGE: a method for assessing and communicating the safety status of vessels in maritime distress situations. Saf Sci 85:117–129. https://doi.org/10.1016/j.ssci.2016.01.003
Ockerby P (2001) Evacuation of a passenger ship - is panic a major factor? Australian Journal of Emergency Management 16(1):8–14
Ölcer AI, Majumder J (2006) A case-based decision support system for flooding crises onboard ships. Qual Reliab Eng Int 22:59–78. https://doi.org/10.1002/qre.748
Papanikolaou A, Spanos D, Boulougouris E, Eliopoulou E, Alissafaki A (2004) Investigation into the sinking of the ro-ro passenger ferry express Samina. Int Shipbuild Prog 51(2–3):95–120
Peiris W, Prentice D, Brzoska L (2015) Lloyd’s Register’s ship emergency response service (SERS): casualty response – initial damage assessment and verification, damaged ship III, Royal Institute of Naval Architects, 25–26 March 2015, London, UK
Pennanen P, Ruponen P, Ramm-Schmidt H (2015) Integrated decision support system for increased passenger ship safety, RINA, Royal Institution of Naval Architects - damaged ship III, 25–26 March 2015, London, UK
Pennanen P, Manderbacka T, Ruponen P (2017) Implications of different alternatives for damage stability analysis in decision support, Proceedings of the 16th International Ship Stability Workshop, 5–7 June 2017, Belgrade, Serbia, pp. 81–86
Ruponen P (2007) Progressive flooding of a damaged passenger ship, doctoral dissertation, TKK Dissertations 94, 128 p. https://aaltodoc.aalto.fi/handle/123456789/2931
Ruponen P (2014) Adaptive time step in simulation of progressive flooding. Ocean Eng 78:35–44. https://doi.org/10.1016/j.oceaneng.2013.12.014
Ruponen P (2017) On the effects of non-watertight doors on progressive flooding in a damaged passenger ship. Ocean Eng 130:115–125. https://doi.org/10.1016/j.oceaneng.2016.11.073
Ruponen P, Larmela M, Pennanen P (2012) Flooding prediction onboard a damaged ship, Proceedings of the 11th International Conference on stability of ships and ocean vehicles, STAB2012, Athens, Greece, 2012, pp. 391–400
Ruponen P, Lindroth D, Pennanen P (2015) Prediction of survivability for decision support in ship flooding emergency, Proceedings of the 12th international conference on the stability of ships and ocean vehicles STAB2015, 14–19 June 2015. Glasgow, UK, pp 987–997
Ruponen P, Pulkkinen A, Laaksonen J (2017) A method for breach assessment onboard a damaged passenger ship. Appl Ocean Res 64:236–248. https://doi.org/10.1016/j.apor.2017.01.017
Ruponen P, Manderbacka T, Lindroth D (2018) On the calculation of the righting lever curve for a damaged ship. Ocean Eng 148:313–324. https://doi.org/10.1016/j.oceaneng.2017.12.036
Spouge JR (1986) The technical investigation of the sinking of the Ro-Ro ferry European gateway, Transactions of Royal Institute of Naval Architects 128:49–72
Takkinen E, Ruponen P, Pennanen P (2017) Required flooding sensor arrangement for reliable automatic damage detection, RINA, Royal Institution of Naval Architects - Smart Ship Technology 2017, 24–25 January 2017, London, UK
Trincas G, Braidotti L, De Francesco L (2017) Risk-based system to control safety level of flooded passenger ships. Brodogradnja 68:31–60. https://doi.org/10.21278/brod68103
Varela JM, Guedes Soares C (2007) A virtual environment for decision support in ship damage control. IEEE Comput Graph Appl 27(4):58–69. https://doi.org/10.1109/MCG.2007.74
Varela JM, Rodrigues JM, Guedes Soares C (2014) On-board decision support system for ship flooding emergency response. Procedia Computer Science 29:1688–1700. https://doi.org/10.1016/j.procs.2014.05.154
Varela JM, Rodrigues JM, Guedes Soares C (2015) 3D simulation of ship motions to support the planning of rescue operations on damaged ships. Procedia Computer Science 51:2397–2405. https://doi.org/10.1016/j.procs.2015.05.416
Watson MH (1995) Disasters at sea – every ocean-going passenger ship catastrophe since 1900, second edition updated and expanded by William H. Miller, Patrick Stephens Ltd, 216 p
Ypma EL, Turner T (2019) An approach to the validation of ship flooding simulation models. In: Contemporary ideas on ship stability. Fluid mechanics and its applications, vol. 119. Springer, Cham, pp. 637-675. https://doi.org/10.1007/978-3-030-00516-0_38
Funding
Open access funding provided by Aalto University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ruponen, P., Pennanen, P. & Manderbacka, T. On the alternative approaches to stability analysis in decision support for damaged passenger ships. WMU J Marit Affairs 18, 477–494 (2019). https://doi.org/10.1007/s13437-019-00186-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13437-019-00186-8