
Abstract
The authors propose an efficient nanosystem based on molecular communication technology. Molecular communication via diffusion (MCvD) is a promising trend for exchanging biochemical signals between a nanotransmitter (NT) and a nanoreceiver (NR) in aqueous media over short distances. Nanosystem-based MCvD has recently received a lot of attention in advanced targeted nanomedicine applications such as targeted drug delivery and healthcare monitoring (disease/diagnosis/analysis). However, the random nature of molecular diffusion causes counting noise, which significantly degrades the performance of the nanosystem-based molecular communication. In this paper, a reliable and simple denoising technique, namely Savitzky–Golay (SG) filter, is developed in the nanosystem-based MCvD to provide high accuracy of molecular information reception. The performance of the proposed nanosystem is evaluated in terms of bit error rate (BER) and correlation efficiency. The results reveal that the nanosystem-based MCvD using the proposed SG filter outperforms the MCvD using current denoising techniques such as moving average filter, wavelet denoising and I-filter. Actually, it was found that the SG filter increases the gain efficiency in terms of the correlation coefficient by more than 60% in comparison to the I-filter at low and high signal-to-noise ratios (SNRs), whereas in comparison to wavelet denoising, the SG filter achieves more than 10% enhancement in gain efficiency at low SNRs.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nanotechnology has the ability to shift system design from the microscale to the nanoscale, resulting in new applications, particularly in nanomedicine. Recently, the nanosystem has been used in advanced targeted nanomedicine (ATN) applications. One of the challenges that ATN faces is designing and configuring nano, micro, and macro communication/control devices to perform specific tasks. For example, a simple nanosystem design can be used in targeted drug delivery systems, where therapeutic drug molecules (i.e. nanoparticles) can be loaded on NT, and received by NR (i.e. the diseased cell). The MCvD is a promising bio-inspired communication system that aims to exchange molecular information between the NT and NR [1, 2]. The noise suppression approach for MC must be computationally simple, because the components of the nanosystem are nanoscale devices with limited computing capabilities. In practice, the MCvD suffers greatly from noise, which has two primary sources: physical sampling and physical counting. Counting noise, which is measured as additive signal-dependent noise, is the dominant noise considered in molecular communication paradigms. It is produced as a result of the randomness of molecules in motion and the discreteness of the drug molecules diffusion process. However, the counting error at the receiver is represented by the physical sampling noise [3]. Similar to conventional communication systems, noise can be overlapped with molecular signals based on concentration levels of molecules. As a result, such noise has a significant impact on the overall performance of the nanosystem. There are various denoising techniques that were proposed in the literature to improve the performance of the nanosystems with MCvD by reducing the noise effect. These techniques include moving average filter, wavelet denoising [4] and I-filter with infinite length [5]. Our goal is to develop a robust denosing technique to suppress unwanted additive noise from the MCvD signal and recover the main signal with high accuracy. In the current work, a nanosystem based on MCvD with SG filtering was developed. The SG filter has an excellent noise-suppression ability, and it is easy to implement in biological systems. Hence, it is suitable for the nanosystem in medical applications. The main contributions of this work are as follows:
-
Employing the SG filter in nanosystem-based MCvD.
-
Developing a mathematical analysis for the SG filter in the presence of noise and inter-symbol interference (ISI).
-
Investigating the impact of design parameters such as window length and order of the polynomial of the SG filter.
-
Comparing the SG filter with other denoising techniques.
The remainder of the paper is structured as follows. In Sect. 2, the related work is introduced. In Sect. 3, the conventional smoothing techniques are presented. In Sect. 4, the proposed system model based on MCvD is presented. The proposed denoising technique is introduced in Sect. 5. The simulation results are discussed in Sect. 6. Finally, Sect. 7 gives the concluding remarks.
2 Related Work
The authors of [6] proposed Markov prediction computational methods for miRNA–mRNA interaction pairs in order to predict miRNA targets. Rather than adopting a general tool for miRNA target prediction, they considered a postprocessing filter for the miRNA–mRNA duplexes predicted by the Markov model. However, more factors and discriminative features should be added to make their proposed method more realistic and efficient. The authors of [5] have investigated a noise suppression method that is suitable for MCvD. They presented an I-filter design that performs exceptionally well in noise suppression in high-noise scenarios. The goal of introducing filters to the MCvD system is to reduce the noise, and hence enable the recovery of the original signal. When compared to conventional methods, the I-filter could improve the signal detection performance. In [7], the authors proposed an optimal design for a linear filter suitable for symbol-by-symbol detection. By maximizing the expected signal-to-interference-plus-noise ratio (SINR), the authors presented an optimal matched filter. The authors demonstrated that their proposed matched filter outperforms existing conventional schemes, particularly when ISI is severe. The concept of the reverse function of the matched filter was investigated in [8], wherein the authors proposed a method for maximizing the expected SNR in the reception process of a molecular communication system. In [9], the authors presented a Wiener filter with finite impulse response and compared it to the minimum mean square error (MMSE) detector in a diffusion-based molecular communication (DBMC) system. The main idea of the Wiener filter is to replace the observation noise variance with its statistical average. In terms of BER, the results show that the presented Wiener filter outperforms adaptive threshold detection (ATD) and fixed threshold detection (FTD) techniques.
The SG filter was introduced in chemical spectrum analyzers to reduce noise, while maintaining the original signal shape by using least squares data smoothing. In [10], the authors investigated the use of the SG filter in electroencephalogram (EEG) signal processing. A noisy synthetic EEG signal was processed using an SG filter with varying window size and order, and the original signal was successfully recovered. Furthermore, in [11], the SG filter was used for smoothing and differentiating a subset of data. The convolution method is used to compute the filter coefficients. The performance of the SG filter has been investigated. It is able to reduce the high-frequency noise in a signal and eliminate the low-frequency signal due to its smoothing properties. In contrast, the authors of [12] formulated the optimal filter selection problem in the presence of noise using a point-wise MMSE criterion. The electrocardiogram (ECG) denoising problem was chosen as an application and proof of concept for SURE-based optimum SG filter selection. Furthermore, the authors of the [13] investigated the use of the SG filter as a smoothing filter in cognitive radio (CR) vehicular networks. In vehicular networks, the SG filter can overcome spectrum access constraints.
Recently, the authors of [14] proposed an optimized adaptive SG filter based on a deep learning network. The mathematical formula for the SG smoothing filter has been obtained. The authors presented a multilayer perceptron (MLP) artificial neural network (ANN) architecture and an optimized SG algorithm. In contrast to traditional SG filtering, the optimized algorithm can adjust the filtering parameters to achieve the best spectral SNRs. The authors of [15] investigated the use of the SG filter as a smoothing filter with a regularization algorithm for identifying time-varying finite impulse response (FIR) systems using the empirical Bayes approach. In order to identify non-stationary systems, the authors of [16] estimated a sequence of points at successive instants of time for adaptive selection of the number of basis functions and the size of the local analysis window of the SG filter. The authors of [17] proposed a finite-length filter for ISI suppression. Kalman filter, which was first introduced in molecular communication in [18], has been developed for estimation, system identification, and noise cancellation for in vitro and in vivo systems in molecular communication. The authors have investigated a mathematical-analysis-based chaos theory to suppress ISI for multi-path channels in order to optimize the quality of transmission in conventional wireless networks [19].
Unlike the previous works, the current work is original in that it presents a new nanosystem based on molecular communication in the presence of noise and ISI. It can be used in promising ATN applications. The use of the SG filter at the NR is novel in this work, as it is regarded as a reliable and simple denoising technique. Furthermore, when compared to well-known systems, the proposed system has high gain efficiency in terms of the correlation coefficient and lower BER.
3 Conventional Smoothing Techniques
Smoothing is a signal processing technique that is commonly used to eliminate noise from signals. Smoothing is accomplished in this paper for restoring the signal by reducing some undesirable components such as ISI and noise. Despite their widespread use in conventional communications, filters are rarely used in MCvD.
3.1 Moving Average Filter
The moving average filter is the most commonly-used filter in signal processing, owing to its simplicity of understanding and application [20]. Despite its simplicity, the moving average filter is ideal for common tasks such as noise reduction, while maintaining a sharp step response. As a result, it is the best filter for time-domain encoded signals. The moving average filter is a good time-domain smoothing filter, but a terrible frequency-domain filter. The theory of convolution of the input signal with all ones of the given window is applied by:
where x is the input signal and M is the number of points used in the moving average. The amount of noise reduction is equal to the square root of the average number of points. Moving average filters include simple moving average, cumulative average, weighted moving average, and exponential moving average filters.
3.2 Wavelet Smoothing
A wavelet is a wave-like oscillation that is time-localized [21, 22]. Wavelets are distinguished by two primary characteristics: scale and location. Scale (or dilation) defines how a wavelet is expanded for low frequency with poor time resolution or shrunk for high frequency with good time resolution, which is defined as changing the width and central frequency of the wavelet. The location of the wavelet in time or space, for example shifting, defines its position.
Wavelet smoothing is performed by selecting a wavelet of a specific scale. Then, we slide this wavelet across the noisy signal to vary its location, multiplying the wavelet and signal at each time step (A signal is convolved with a set of wavelets at a variety of scales). This multiplication yields coefficients for that wavelet scale at that time step. The coefficient values are determined by whether or not the signal is correlated with the wavelet. When the wavelet frequencies match those of the original signal, high output coefficients are produced. The process is repeated by increasing the wavelet scale.
The wavelet transform has several key advantages. Wavelet transform can extract both local spectral and temporal information. A variety of wavelets can be adopted to choose from. It may be preferable to use the Short-Time Fourier Transform (STFT), which requires segmenting the signal and performing the Fourier transform on each segment. The second significant advantage appears to be the details obtained. If we know what characteristic shape we want to extract from the signal, we can choose from a variety of wavelets to best match the original signal, including Daubechies, Morlet, Haar, Coiflets, Symlet, and Biorthogonal. Wavelet transforms are classified into two types: continuous and discrete. The key distinction between these two types is that the Continuous Wavelet Transform (CWT) employs every possible wavelet across an infinite number of scales and locations. The Discrete Wavelet Transform (DWT) uses a finite set of wavelets that are defined at specific scales and locations. Denoising is one of the applications of DWT. The definition of the DWT is as follows:
where s denotes the scale and l denotes the location of the wavelet. The wavelet function is essentially of band-pass nature, with scaling halving its bandwidth for each level. This yields the output coefficients as approximation and detail coefficients. It also raises the issue that an infinite number of levels would be required to cover the entire spectrum. The scaling function filters the transform lowest level and ensures that the entire spectrum is covered. Current wavelet-based denoising methods are not very reliable in terms of accurately retrieving signal components, particularly for weak signals with magnitudes close to those of noise. Another issue with current wavelet denoising methods is their practicality.
3.3 I-Filter Smoothing
The purpose of I-filter is to process the sampled received signal in order to reduce noise for better signal restoration, and potentially, better signal detection [5]. The impulse response of this filter is:
where M is the length of the filter and M = N \(\times\) Ns.
When the length of h is finite, the SNR can be maximized if the coefficients of h are the same. The SNR could be improved by increasing the filter length M. The I-filter has h, with all of its coefficients equal to 1, as follows:
When the I-filter length is infinite, it can achieve the best noise suppression performance.
Because the SG filter, I-filter, and wavelet denoising have low computational complexity, they are appropriate for current nanonetworks with limited computational capabilities. Furthermore, they rely on the convolution process, which expresses how the shape of one signal is modified by the impulse response with a simple mathematical representation. The SG filter and wavelet denoising are affected by the size of the window. To fit the signal, moving average and SG filters depend on polynomials. The wavelet denoising and SG filter can efficiently reconstruct the main signal, which means that the filtered signal is correlated with the input signal, implying that the features of the original signal are efficiently recovered. In contrast, the I-filter has a poor ability to efficiently reconstruct the main signal features.
4 System Model
The proposed nanosystem is built similar to a conventional communication system. It includes three parts: a point NT, a molecular diffusion channel and a passive NR, as depicted in Fig. 1. The synchronization of the system is assumed to be achieved. The loaded drug molecule inside the NT passively diffuses to the NR within its spherical volume VR = (4/3)πR3, where R is the radius of the NR, and the distance between TN and NR is d, where d ≫ R. By assumption, the velocity of flow is not considered. The released drug molecules are modulated using an on–off keying modulation scheme. Subsequently, a binary symbol transmission of 0 and 1 is considered. The symbol sequence {ai} with ai ∈ {0, 1}, where i = 0, 1, 2, …, N − 1, represents the modulated drug molecules by the NT. It was further assumed that the MCvD channel has a memory of N symbol intervals, i.e., the ISI for the symbol interval Tb originates from the N − 1 previous symbols. The drug molecules are propagated over a molecular channel according to the Fick’s law of diffusion. The molecular channel response, when one drug molecule is released by the NT at instant t = 0, can be expressed as [1]:
where D is the diffusion coefficient, which is affected by several time-varying factors such as fluid viscosity and temperature. As a result, the molecular diffusion channel is also time varying. The molecular diffusion channel represented by Eq. (5) spans tm = d2/6D and does not completely disappear, causing an ISI term with the next new pulse emission at the start of each symbol interval.

At the beginning of each symbol interval Tb, the NT releases an impulse δ[t] with a number of drug molecules Q representing symbol “1”, and nothing for symbol “0”. The modulated signal x[t] released by the NT into the diffusion channel is expressed by:
After the propagation through the diffusion channel, the modulated molecular signal x[t] arriving at the NR is convolved with the channel impulse response c[t]. As a result, the total noiseless received concentration by the NR can be calculated as follows:
According to the molecule concentration distribution, y(t) is a signal with infinite duration. It does not completely disappear in a short time. In subsequent symbol transmission scenarios, the transmitted molecules may arrive at symbol intervals that are different from the intended interval, resulting in ISI in the MCvD nanosystem. As a result, the received signal decreases after reaching its maximum value at t = tm, which can be avoided, when Tb ≫ tm, resulting in negligible ISI. The total received concentration at the NR in the presence of noise and ISI is given by [5]:
where n(t) represents noise, which is a core part of the received signal that degrades the system performance. As previously demonstrated, noise can come from another nanomachine, and from molecular reactions and background molecules. The noise is assumed to be Additive White Gaussian Noise (AWGN) in the literature. It can be expressed by n(t) ∼ N \( \left( 0, \sigma^2_N (t) \right) \). The noise power is defined as the variance of the normal distribution \( \sigma^2_N \):
At the NR side, it was assumed that the NR is able to sample the molecule concentration in reception space with a sampling interval Ts = Tb/Ns (i.e., take Ns samples in each symbol interval Tb). The received signal samples by the RN are given by [24]:
where Yk = Y [kTb], Yk−i = Y [k − iTb], nk = n[kTb] and k = 0, 1, 2,… However, the channel response is causal, i.e., Yk = 0 if k < 0. Furthermore, in a practical system, it is assumed that the length of the ISI is finite and given by I + 1; that is, Yk = 0 for k > I. Thus, Yk depends on the currently transmitted bit ak and I previously transmitted bits ak1,…, akI. The sampled signal can be expressed as:
The purpose is to retrieve Y[t] from these samples using the SG filter.
5 Proposed Denoising Technique
In this section, the principles for designing an SG denoising filter for the nanosystem-based MCvD are presented. The basic concept of the SG filter is demonstrated, and thus the mathematical expression for signal smoothing is developed. Clearly, the SG filter can smooth a noisy signal using polynomial approximation of the raw data in a fixed data window W. In other words, the SG filtering algorithm employs the least-squares theory, also known as polynomial theory. This filter is widely used in a wide range of applications, including digital control systems, speech processing, and chemical spectrum analysis [25].
In the context of molecular communication described in the proposed system model, the received concentration of drug molecules at the NR in the presence of noise is expressed by Eq. (8). For detection, the NR has an SG filter. The SG (W, n) filter is a linear and shift-invariant filter, which has two main design parameters: order of the polynomial n and window size W = 2 M + 1. M is an odd number to maintain symmetry of the output. The received sampled signal at the NR is obtained in Eq. 11. It is considered as the input to the SG filter. Therefore, the input successive sampled vector, Yk = (Yk[− M], …, Yk[M]), of length 2M + 1 is fitted by the least squares polynomial P(z) = \(\mathop \sum \nolimits_{i = 0}^{n} a_{i} z^{i} = a_{0} + a_{1} z + a_{2} z^{2} , \ldots ,a_{n} z^{n}\) in such a way to minimize the mean-square approximation error for the group of input samples. Therefore, the mean-square error ϵn can be expressed by [26]:
The SG algorithm searches for the best n + 1 polynomial coefficients to best fit raw data for a given n-degree polynomial, and evaluates the result to be put at the window center point. The window W is then shifted one bin to the right as Yk = (Yk[i − M], …, Yk[i + M]). The approximation method then restarts by finding new coefficients, while still evaluating the resulting polynomial at the center bin.
In order to determine the coefficients of the filter ai, ϵn is differentiated with respect to these coefficients, and the derivatives are set to zero, leading to n + 1 equations in n + 1 unknowns coefficients (a0, a1, …, an).
The polynomial coefficient vector a = [a0, a1,…, an]T, and the input samples vector Yk = [Yk−M,…,Yk−1,…,Yk+M]T are defined. The coefficients a0, a1….an are obtained by solving the normal equations a = (ATA)−1ATYk, where A is the Vandermonde matrix with the ith columns equal to 1, z, z2, …, zn. The coefficients of Yk in these expressions are known as convolution coefficients. They are elements of the matrix C = (ATA)−1AT. As a result, the final expression is obtained as follows:
The detection of sequences may be computationally challenging, especially in simple NR systems with limited computational capabilities. As a result, a simple detection scheme is introduced. In this scheme, the receiver counts the number of molecules within one symbol interval and detects the transmitted data with its maximum value. With the SG filter, a simple detection scheme can be used as follows:
where the threshold Ω is a fixed value defined as Ω = 0.5 Q Max[c[t]].
6 Simulation Results
In this section, the performance of the proposed nanosystem based on SG filter is studied by considering MCvD. Actually, various numerical simulation experiments were performed to show the performance of the developed nanosystem with SG filter compared to systems with traditional filters. Simulation experiments were conducted using MATLAB. The computation time was calculated with MATLAB® version R2021a on a 64-bit operating system with 16 GB RAM and a 2.60 GHz processor. To overcome processing variations of the computer, the computation time was measured 100,000 times, and then averaged. All results are provided using the parameters given in Table 1 [5]. The proposed nanosystem based on the designed SG filter was successfully tested on a noisy synthetic molecular signal at different values of SNR. For the sake of comparison, the proposed nanosystem was tested with different noise-suppression techniques, such as average filter, I-filter and wavelet denoising, in terms of BER performance at different SNR values.
The signal processing workflow includes several steps. We generate the transmitted signal bits. The modulated signal x(t) is released by the NT in the form of a number of molecules Q. The modulated molecular signal x(t) arrives at the NR convolved with the channel impulse response c(t). In fact, the NR senses the concentration within its spherical observation volume VR = (4/3)πR3, where R is the radius of the NR, and the distance between the point transmitter and the receiver center is d, which is large enough compared to the radius R, where d ≫ R. The radius of the receiver influences its capability. Furthermore, the number of molecules released Q has an effect on the system performance.
The time instant at which c(t) reaches the maximum allowable number of molecules is equal to tm = d2/6D. The number of molecules captured by the receiver increases as Q increases, and hence the system performance is enhanced with a decrease in the BER. Noise is added to the original molecular communication signal. The signaling interval Tb should satisfy the condition Tb ≫ tm in order to have a negligible ISI. The emission of a new pulse before the previously emitted molecules vanish in the reception space causes ISI, because the molecular signal is an infinite-duration signal and does not disappear completely in the reception space in a short time. Finally, the SG filter, with the appropriate order and window length, can be applied in order to detect the transmitted bits. The Sgolayfilt function from the signal processing toolbox was used to investigate the performance of the proposed system. Furthermore, the selection of simulation parameters has a significant impact on the performance of the MCvD system, as detailed in our previous paper [27].
6.1 Effect of Design Parameters
It is critical to select the design parameters of the developed SG filtering algorithm in order to obtain the best results. The order of the filter n and the window length W are two examples of such parameters. The performance of the proposed nanosystem based on SG filter was investigated with different filter orders and fixed values of W and at various SNR values. Here, we use Sgolayfilt (noisy signal, n, W). Figure 2 shows the BER performance of the proposed nanosystem with SG filter at different SNRs. As it can be seen, the BER is significantly improved, when the order of the SG filter is high. On the other hand, when n = 0 (i.e., moving average filter), the BER of the nanosystem is roughly fixed.

BER performance versus SNR at different orders n of the SG filter
The performance of the nanosystem could be enhanced in terms of BER by selection of the best window length W. Figures 3 and 4 illustrate the effect of window length W of the SG filter on the BER performance. Figure 3 shows the BER performance versus the window length W with different orders of the SG filter at SNR = 2 dB and 6 dB. It can be observed that the BER performance of the proposed nanosystem is significantly improved, when SNR is high (i.e., 6 dB), especially at higher orders of the SG filter of 6 and 8. Additionally, it is shown that the BER of the proposed nanosystem is dramatically enhanced, when the window length of the SG filter is less than 51, especially at high SNR values and high filter orders.

BER versus W with varying n at SNR = 2 dB and 6 dB

Original signal and SG-filtered signals for different window lengths W at constant n = 2
Figure 4 shows the effect of window length on smoothing for different sampling points at the NR of the proposed nanosystem. The original considered molecular signal (green solid line) is corrupted by a noisy molecular signal (green dotted color). The SG filter design parameters taken into account are n = 2 and W = 3, 9, 15 and 25. The outputs of the SG filter for the four different window lengths are illustrated in Fig. 4.
The sampled signal, Yk, is corrupted by a noisy signal with zero mean and a variance estimated, according to Eq. (4). The capability of the SG filter to recover the original signal from the corrupted one is mainly based on the filter order and window length.
In comparison to the original signal, the SG filter output with a small window length (W = 9) has a low bias and high variance as shown in the zoomed area (pink color). As the window length (W = 25) increases, the variance of the SG filter output signal decreases, while the bias increases. There is an optimal point in this tradeoff with good bias and variance at W = 15. It can be concluded that the SG filter can smooth the signal if W > n + 1, otherwise, no smoothing is provided.
6.2 Performance Comparison
For the sake of comparison, an orthogonal wavelet, such as Symlet or Daubechies wavelet, is a suitable choice. However, a biorthogonal wavelet can be useful for image analysis wherein the linear phase of biorthogonal wavelet filters is essential for signal denoising. In the proposed molecular communication system with denoising, we have employed Symlet N which has characteristics of least asymmety, nearly linear phase, and N vanishing moments. Figure 5 shows the performance of the proposed nanosystem based on the SG filter in terms of BER, when compared to the systems based on traditional wavelet denoising and I-filter at different SNR values. It can be seen that the BER performance of the proposed nanosystem is significantly better than those of the systems based on wavelet denoising and I-filter. It is worth emphasizing that even at very low SNR (for example, less than 6 dB), the developed SG filter can help to maintain a good BER level of less than 10−7, whereas the BER in case of wavelet denoising increases to 10−2 and in case of I-filter increases to 10−4 at the same value of SNR.

Performance comparison of nanosystems based on the proposed SG filter and the conventional filters in terms of BER
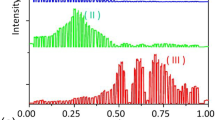
Figure 6 illustrates the recovery capabilities of the NR with SG filter, moving average filter, and wavelet denoising. The graph shows that the proposed NR based on SG filter has a better ability to retain edges, whereas the moving average filter can keep more flattened levels. It is worth noting that the NRs employing moving average filter or wavelet denoising are less stable than that based on the SG filter. The NR based on SG filter is able to recover the original signal, especially at low SNR values.

Performance comparison of nanosystems based on the proposed SG filter and the conventional filters in terms of recovery
6.3 Correlation Efficiency
Another important metric, which highly demonstrates the performance of the proposed nanosystem based on SG filter, is the correlation coefficient metric (CCM). It describes how much the filtered signal is correlated with the input signal, implying that the features of the original signal are efficiently recovered. For this reason, the nanosystem based on SG filter was proposed to gain the advantages of SG filtering and its ability to retain the features of the original signal, efficiently. In order to evaluate the performance of the demonstrated nanosystem in terms of CCM, two signals (input and recovered), represented by the two vectors X and Y, are considered. The correlation coefficient is then given by [28, 29]:
where cov(.) is the covariance, and the variance of the signal is denoted by var(.). Figure 7 illustrates the CCM versus W for different orders n for two values of SNR. It can be seen that the CCM is slightly better, when the original signal has high SNR (6 dB) rather than low SNR (0 dB). Additionally, it is shown that for short window lengths (less than 71 bins), the SG filters with different orders n produce high correlation coefficients that are very close to one, especially at high SNR. Obviously, in the case of n = 0 (i.e., moving average filter), the CCM decreases dramatically with the increase of W for the original signal with low as well as high SNR.

Correlation coefficient metric (CCM) versus W at different values of n
Furthermore, Table 2 shows the correlation coefficient for I-filter and wavelet denoising cases, as well as the gain efficiency, for the purpose of comparing the proposed nanosystem based on SG filter with other systems. The gain efficiency is calculated as the difference between the CCM with the SG filter and the CCM with the I-filter or wavelet denoising with respect to the CCM with the SG filter for low and high SNRs (0, 3, 6 and 9 dB) with W = 51 and n = 4 and 8. Table 2 shows that the SG filter outperforms both the I-filter and the wavelet denoising. The SG filter clearly outperforms the wavelet denoising at low SNR, while the wavelet denoising shows a slight improvement at high SNR [30].
The proposed nanosystem based on the designed SG filter has been successfully tested on noisy synthetic molecular signals with different SNR values. It is demonstrated that the proposed NR based on SG filter can efficiently remove noise, while preserving the original shape of the signal. The proposed SG filter exhibits computational simplicity, speed, and robustness.
7 Conclusion
The goal of this study was to investigate the use of the SG as a smoothing filter in a nanosystem with molecular communication via diffusion (MCvD). The results show that when compared to the popular moving average linear filter, I-filter and wavelet denoising, the SG filter is capable of improving the performance of the developed nanosystem in terms of detecting signals with low BER and the highest correlation coefficient. It was demonstrated that the SG filter main parameters n, and W have a strong influence on the performance of the nanosystem in terms of BER, with the best performance at high n and moderately-small W. Furthermore, it is demonstrated that the proposed nanosystem based on the SG filter outperforms other systems in terms of correlation coefficient metric and gain efficiency, especially at high SNR, and it can recover the original signal main features. We discovered that the proposed nanosystem based on SG filter has an improvement in gain efficiency by more than 60% over that of the I-filter and more than 10% over that of wavelet denoising. Therefore, the proposed nanosystem based on the SG filter is able to remove noise, while retaining the original shape of the signal, making it suitable for future nanomedicine and targeted drug delivery.
References
Kabir, H; Kwak, K.S.: Physical channel model for molecular communications. In: Modeling, methodologies and tools for molecular and nano-scale communications: modeling, methodologies and tools, pp. 57–78. Springer International Publishing, cham (2017)
Chude-Okonkwo, U.; Malekian, R.; Maharaj, B.T.: Advanced targeted nanomedicine a communication engineering solution, p. 143. Springer, Cham (2020)
Pierobon, M.; Akyildiz, I.F.: Diffusion-based noise analysis for molecular communication in nanonetworks. IEEE Trans. Signal Process. 59(6), 2532–2547 (2011)
Alzaq, H.; Üstündağ, B.B.: A comparative performance of discrete wavelet transform implementations using multiplierless. Wavelet Theory Appl. 111 (2018)
Zheng, R.; Lin, L.; Yan, H.: A noise suppression filter for molecular communication via diffusion. IEEE Wirel. Commun. Lett. 10(3), 589–593 (2020)
Xiaozhou, J.; Zhigang, L.; Jinlong, S.; Fan, D.: A miRNA target interaction filter based on Markov model. In: 2010 2nd International Conference on Future Computer and Communication, vol. 3, pp. V3–185. IEEE (2010)
Jamali, V.; Ahmadzadeh, A.; Schober, R.: On the design of matched filters for molecule counting receivers. IEEE Commun. Lett. 21(8), 1711–1714 (2017)
Abd El-atty, S.M.; Arafa, N.A.; Abd El-Samie, F.E.; Marey, M.; Abouelazm, A.E.: Maximising receiver response in molecular communication systems. Electron. Lett. 56(16), 818–820 (2020)
Aslan, E.; Celebi, M.E.; Pekergin, F.: Wiener and Kalman detection methods for molecular communications. IEEE Trans. NanoBiosci. 21(2), 256–264 (2022)
Acharya, D.; Rani, A.; Agarwal, S.; Singh, V.: Application of adaptive Savitzky–Golay filter for EEG signal processing. Perspect. Sci. 8, 677–679 (2016)
Luo, J.; Ying, K.; Bai, J.: Savitzky–Golay smoothing and differentiation filter for even number data. Signal Process. 85(7), 1429–1434 (2005)
Krishnan, S.R.; Seelamantula, C.S.: On the selection of optimum Savitzky-Golay filters. IEEE Trans. Signal Process. 61(2), 380–391 (2012)
Angrisani, L. et al.: The effect of Savitzky-Golay smoothing filter on the performance of a vehicular dynamic spectrum access method. In: Proceedings of the 20th IMEKO TC4, pp. 1116–1121. IWADC (2014)
Zhang, G.; Hao, He.; Wang, Y.; Jiang, Y.; Shi, J.; Jing, Yu.; Cui, X.; Li, J.; Zhou, S.; Benli, Yu.: Optimized adaptive Savitzky–Golay filtering algorithm based on deep learning network for absorption spectroscopy. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 263, 120187 (2021)
Niedzwiecki, M.J.; Ciolek, M.; Gancza, A.; Kaczmarek, P.: Application of regularized Savitzky-Golay filters to identification of time-varying systems. Automatica 133, 109865 (2021)
Niedzwiecki, M.; Ciolek, M.: Generalized Savitzky–Golay filters for identification of nonstationary systems. Automatica 108, 108477 (2019)
Zheng, R.; Lin L.; Yan, H.: Filters for ISI suppression in molecular communication via diffusion. arXiv preprint arXiv:2104.14174 (2021)
Zechner, C.; Seelig, G.; Rullan, M.; Khammash, M.: Molecular circuits for dynamic noise filtering. Proc. Natl. Acad. Sci. 113(17), 4729–4734 (2016)
Liang, Ye.; Gao, N.; Liu, T.: Suppression method of inter-symbol interference in communication system based on mathematical chaos theory. J. King Saud. Univ. Sci. 32(2), 1749–1756 (2020)
Blaabjerg, F. ed.: Control of power electronic converters and systems: Volume 2, Vol. 2. Academic Press ( 2018)
Ganjalizadeh, V.; Meena, G.G.; Wall, T.A.; Stott, M.A.; Hawkins, A.R.; Schmidt, H.: Fast custom wavelet analysis technique for single molecule detection and identification. Nat. Commun. 13(1), 1035 (2022)
Jallouli, M.; Zemni, M.; Mabrouk, A.B.; Mahjoub, M.A.: Toward new multi-wavelets: associated filters and algorithms. Part I: theoretical framework and investigation of biomedical signals, ECG, and coronavirus cases. Soft Comput. 25, 14059–14079 (2021)
Liao, X.; Jia, Z.; Zhenqiang, Wu.; Liu, Bo.; Wang, X.; Jiang, X.: Modulation and signal detection for diffusive-drift molecular communication with a mobile receiver. Mob. Inf. Syst. 2021, 1–17 (2021)
Kilinc, D.; Akan, O.B.: Receiver design for molecular communication. IEEE J. Sel. Areas Commun. 31(12), 705–714 (2013)
Sadeghi, M.; Behnia, F.: Optimum window length of Savitzky–Golay filters with arbitrary order. arXiv preprint arXiv:1808.10489 (2018)
Savitzky, A.; Golay, M.J.E.: Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 36(8), 1627–1639 (1964)
Attia, E.S.; Khalaf, A.A.; El-Samie, A.; Fathi, E.; El-Atty, A.; Saied, M.; Ki-Il, K.: Embedded coded relay system for molecular communications. Comput. Mater. Continua 2729–2748 (2022)
Acharya, D., et al.: Application of adaptive Savitzky–Golay filter for EEG signal processing. Perspect. Sci. 8, 677–679 (2016)
Angrisani, L.; Capriglione, D.; Cerro, G.; Ferrigno, L; Miele, G: The effect of Savitzky–Golay smoothing filter on the performance of a vehicular dynamic spectrum access method. In: Proceedings of the 20th IMEKO TC4, pp. 1116–1121. IWADC (2014)
Srivastava, M.; Anderson, C.L.; Freed, J.H.: A new wavelet denoising method for selecting decomposition levels and noise thresholds. IEEE Access 4, 3862–3877 (2016)
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). Funding was provided by Science and Technology Development Fund (Grant No. OA Agreement).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Abd El-atty, S.M., Attia, E.S., Khalaf, A.A.M. et al. Efficient Nanosystem for Nanomedicine Applications Based on Molecular Communications. Arab J Sci Eng 48, 15541–15552 (2023). https://doi.org/10.1007/s13369-023-07909-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-023-07909-3