
Abstract
We consider polynomials of bi-degree (n, 1) over the skew field of quaternions where the indeterminates commute with each other and with all coefficients. Polynomials of this type do not generally admit factorizations. We recall a necessary and sufficient condition for existence of a factorization with univariate linear factors that has originally been stated by Skopenkov and Krasauskas. Such a factorization is, in general, non-unique by known factorization results for univariate quaternionic polynomials. We unveil existence of bivariate polynomials with non-unique factorizations that cannot be explained in this way and characterize them geometrically and algebraically. Existence of factorizations is related to the existence of special rulings of two different types (left/right) on the ruled surface parameterized by the bivariate polynomial in the projective space over the quaternions. Special non-uniqueness in above sense can be explained algebraically by commutation properties of factors in suitable factorizations. A necessary geometric condition for this to happen is degeneration to a point of at least one of the left/right rulings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Let \({\mathbb {H}}\) be the skew field of real quaternions. Factorization theory for univariate quaternionic polynomials \(Q \in {\mathbb {H}}[t]\) has been developed in Niven (1941), Gordon and Motzkin (1965) and received recent attention because of its relation to kinematics and mechanism science (Hegedüs et al. 2013, 2015). A fundamental theorem of algebra also holds true in the quaternionic case. Consequently, each univariate quaternionic polynomial admits a factorization into linear factors (c. f. Niven (1941), Gordon and Motzkin (1965), Gentili and Stoppato (2008) for quaternionic polynomials and Hegedüs et al. (2013), Li et al. (2019), Li et al. (2019) for similar results in more general associative real algebras). Due to the non-commutativity of the division ring \({\mathbb {H}}\), factorizations into linear factors need not be unique. A quaternionic polynomial \(Q \in {\mathbb {H}}[t]\) of degree n admits, in general, n! different factorizations with linear factors.
Not much is known about factorization theory of multivariate quaternionic polynomials. The only publication we are aware of is the recent paper Skopenkov and Krasauskas (2019) by Skopenkov and Krasauskas. Strangely enough, they derive interesting and innovative factorization results for bivariate quaternionic polynomials as an auxiliary tool for a seemingly unrelated topic, the classification of surfaces in Euclidean three space that are foliated by two families of circles. In this article, we build upon the results and ideas of Skopenkov and Krasauskas. One of the insights is that the bivariate case, where factorizations are exceptional, is much harder than the univariate case, where factorizations always exist.
Already the case of factorization of bivariate polynomials of degree one in one of the indeterminates into univariate linear factors is interesting and will be in the focus of this paper. Motivated by potential applications in kinematics (c. f. Sect. 8), we assume that indeterminates and coefficients commute. Therefore, it is sufficient to consider polynomials \(Q \in {\mathbb {H}}[t,s]\) of bi-degree (n, 1). Denote by \({Q}^*\) the polynomial obtained by conjugating the coefficients of Q. A simple necessary condition for existence of a factorization of the shape
with quaternions a, \(h_1\), ..., \(h_n\), h, \(k_1\), ..., \(k_m \in {\mathbb {H}}\) is existence of real polynomials \(P \in {\mathbb {R}}[t]\) and \(R \in {\mathbb {R}}[s]\) such that \(Q {Q}^* = PR\). By (Skopenkov and Krasauskas 2019, Lemma 2.9), this condition is also sufficient.
In Sect. 2 we settle our notation and recall some basic facts on quaternionic polynomials and their factorization theory. At the beginning of Sect. 3 we recall the original result of Skopenkov and Krasauskas and introduce the notion of equivalent factorizations: The factorization of the univariate polynomials \((t-h_1)\cdots (t-h_n)\) and \((t-k_1)\cdots (t-k_m)\) is in general not unique and this implies non-uniqueness of factorization (1). We consider two factorizations of Q as equivalent if they arise in this way.
Our first substantial new contribution is a geometric interpretation of factorizability in terms of the ruled surface parameterized by Q in the complex extension of \({\mathbb {P}}({\mathbb {H}}) = {\mathbb {P}}^3({\mathbb {R}})\) in Sect. 5. Linear factors \(t-h_i\) or \(t-k_j\) correspond to “null lines”, that is rulings of the “null quadric” \({\mathcal {N}}\) given by the quadratic form \(q \mapsto q{q}^*\). In general, factors to the left and to the right of the s-factor \(s-h\) are distinguished by the two families of rulings on \({\mathcal {N}}\).
There exist bivariate polynomials of bi-degree (n, 1) with non-equivalent factorizations. If Q is such a polynomial, we will show that one is always able to compute a factorization of shape (1) where either \(t-h_n\) or \(t-k_1\) commutes with the s-factor \(s-h\). The respective t-factor can then be viewed as a factor that may appear on the left or on the right of \(s-h\). Therefore, the corresponding ruled surface contains at least one null line that can be considered as an element of both families of rulings on \({\mathcal {N}}\). This is only possible if the respective null line degenerates to a point. The converse of this statement is, however, not true. A detailed investigation of these cases is on the agenda in Sects. 6 and 7.
While factorization of bivariate polynomials is an interesting topic in its own right, our research is also motivated by applications in kinematics. We briefly illustrate the underlying ideas in Sect. 8 and we also explain why factorization results for polynomials of bi-degree (n, 1) are too limiting to allow the direct transfer of kinematic constructions from Hegedüs et al. (2013). This is no longer the case for polynomials of higher bi-degree and the theory presented in this article is of fundamental importance in their factorization theory (c. f. Lercher and Schröcker (2022)).
2 Preliminaries
We denote the algebra of real quaternions by \({\mathbb {H}}\). It is generated by the quaternion units 1, \(\mathbf {i}\), \(\mathbf {j}\) and \(\mathbf {k}\) over the real numbers \({\mathbb {R}}\). An element \(h \in {\mathbb {H}}\) is of the form
The relations
completely define the multiplication in \({\mathbb {H}}\). The conjugate of h is \({h}^* :=h_0 - h_1 \mathbf {i}- h_2 \mathbf {j}- h_3 \mathbf {k}\), its norm is given by
Multiplication of quaternions is not commutative but \({\mathbb {H}}\) is at least a division ring: If \(h \ne 0\), it is invertible and its inverse is given by \(h^{-1}={h}^*/(h {h}^*)\). Conjugation of quaternions is anticommutative, hence for \(h,k \in {\mathbb {H}}\) one obtains \({(hk)}^*={k}^*{h}^*\).
By \({\mathbb {C}}{\mathbb {H}}={\mathbb {H}}+\mathrm {i}{\mathbb {H}}\) we denote the algebra of complex quaternions. It is the \({\mathbb {C}}\)-algebra generated by 1, \(\mathbf {i}\), \(\mathbf {j}\) and \(\mathbf {k}\) with the multiplication rules (2). Note that \(\mathrm {i} \in {\mathbb {C}}\) denotes the imaginary unit of complex numbers. It has to be distinguished from the quaternion unit \(\mathbf {i}\). A complex quaternion is of the form
We define the (complex) conjugate of h by \({h}^* :=h_0 - h_1 \mathbf {i}- h_2 \mathbf {j}- h_3 \mathbf {k}\) and its norm by \(h {h}^*=h_0^2+h_1^2+h_2^2+h_3^2\). The algebra of complex quaternions \({\mathbb {C}}{\mathbb {H}}\) contains zero divisors. These are precisely the elements \(h \in {\mathbb {C}}{\mathbb {H}}\setminus \{0\}\) with vanishing norm \(h {h}^* = 0\). Any complex quaternion \(h \in {\mathbb {C}}{\mathbb {H}}\setminus \{0\}\) with \(h {h}^* \ne 0\) is invertible and \(h^{-1}={h}^*/(h {h}^*)\). Sometimes we view \({\mathbb {H}}\) (or \({\mathbb {C}}{\mathbb {H}}\)) as a real (or complex) vector space of dimension four and we also consider the real projective space \({\mathbb {P}}({\mathbb {H}}) = {\mathbb {P}}^3({\mathbb {R}})\) (or the complex projective space \({\mathbb {P}}({\mathbb {C}}{\mathbb {H}}) = {\mathbb {P}}^3({\mathbb {C}})\)). Projective points are denoted by square brackets: We write [q] for a projective quaternion represented by \(q \ne 0\). For p, \(q \ne 0\) the symbol \([p] \vee [q]\) denotes the connecting line of [p] and [q] if these points are different. If \([p] = [q]\), we have \([p] \vee [q] = [p] = [q]\).
By \({\mathbb {H}}[t,s]\) we denote the set of bivariate polynomials with coefficients in \({\mathbb {H}}\). Addition and scalar multiplication are defined as in the commutative case. Polynomial multiplication is defined by the requirement that t and s commute with the coefficients and with each other. This convention is motivated by potential later applications in kinematics and mechanism science where bivariate polynomials parameterize two-parametric rational motions (c. f. Sect. 8). In this context, t and s serve as real motion parameters and the real numbers form the center of \({\mathbb {H}}\).
For
the conjugate polynomial of Q is defined by conjugating its coefficients:
The norm polynomial \(Q {Q}^*\) is a real bivariate polynomial.
In order to state our results in a clear and simple way, we often consider monic polynomials without real polynomial factors of positive degree:
-
We call a polynomial \(Q \in {\mathbb {H}}[t][s]\) monic if its leading coefficient is a monic polynomial. Given a non-monic polynomial \(Q = \sum _{i=0}^{n}Q_is^{i} \in {\mathbb {H}}[t][s]\), it suffices to consider existence and (non-)uniqueness of factorizations of the monic polynomial \(Q'=a^{-1}Q\) where a denotes the leading coefficient of \(Q_n\).
-
Given \(Q = Q_0 + Q_1\mathbf {i}+ Q_2\mathbf {j}+ Q_3\mathbf {k}\in {\mathbb {H}}[t,s]\) we denote by \(\gcd (Q)\) the monic greatest common divisor of the polynomials \(Q_0\), \(Q_1\), \(Q_2\), \(Q_3 \in {\mathbb {R}}[t][s]\). There exists a unique polynomial \(Q'\) with \(Q = \gcd (Q)Q'\). Obviously, \(Q'\) has no non-constant real polynomial factor.
We use the following notations: For \(Q \in {\mathbb {H}}[t,s]\) we define \(\deg _tQ\) as the degree of Q viewed as an element of \({\mathbb {H}}[s][t]\). Analogously, \(\deg _sQ\) is the degree of Q viewed as an element of \({\mathbb {H}}[t][s]\). Following Skopenkov and Krasauskas (2019), we define
and
In this article, we study factorizations of bivariate polynomials of the form
with \(Q_0, Q_1 \in {\mathbb {H}}[t]\). We call them star-one-polynomials.
2.1 Factorization of univariate polynomials
Factorizability of univariate quaternionic polynomials will turn out to be of great importance for our theory. For later reference, we formulate a theorem that states some crucial univariate factorization results. We provide short sketches of proofs even though the results are already well known. For more details we refer to the respective literature.
Theorem 2.1
Let \(Q \in {\mathbb {H}}[t]\) be a quaternionic polynomial, \(\deg (Q)\ge 1\). There is a unique representation \(Q=\gcd (Q)Q'\) with a polynomial \(Q' \in {\mathbb {H}}[t]\) and \(\deg (Q')=n\), \(n \in {\mathbb {N}}_0\).
-
(a)
If \(\gcd (Q) \ne 1\), the real polynomial \(\gcd (Q)\) admits a factorization into univariate linear factors over \({\mathbb {H}}\).
-
(b)
There exist up to n different monic linear right factors of the polynomial \(Q'\).Footnote 1
-
(c)
There exist up to n! different factorizations of \(Q'\) into univariate linear factors over \({\mathbb {H}}\).
Proof
(Sketch of proof) The polynomial \(\gcd (Q)\) admits a factorization into linear factors over \({\mathbb {C}}\). All factorizations of \(\gcd (Q)\) with linear factors over \({\mathbb {H}}\) are found by replacing the complex unit \(\mathrm {i}\) in each pair of conjugate complex linear factors by a quaternion h satisfying \(h^2 = -1\). These are precisely the quaternions with zero real part and \(h {h}^* = 1\) (c. f. Huang and So (2002)). This shows Part (a).
Since \(Q'\) does not have a real polynomial factor of positive degree, the norm polynomial can be written as \(Q' {Q'}^*=a {a}^* M_1\cdots M_n\) with \(a \in {\mathbb {H}}\) and monic, quadratic, irreducible real polynomials \(M_1, \ldots , M_n\) (the case \(n=0\) is also possible). By Part (a), each \(M_i\) can be factored in infinitely many ways as \(M_i = (t-{h_i}^*)(t-h_i)\), \(h_i \in {\mathbb {H}}\). There is precisely one linear factor \(t-h_i\) that is also a right factor of \(Q'\) (c. f. Niven (1941), Hegedüs et al. (2013)). Using polynomial division we find T, \(U \in {\mathbb {H}}[t]\) such that \(Q' = TM_i + U\) and \(U = u_1t + u_0 \in {\mathbb {H}}[t]\) whence \(h_i = -u_1^{-1}u_0\). If \(M_1, \ldots , M_n\) are pairwise different, we obtain n different right factors of \(Q'\). This construction is also necessary so that the claim of Part (b) follows.
In order to find a factorization of \(Q'\) into univariate linear factors, we use Part (b) and iteratively produce linear right factors of \(Q'\). The thus obtained factorization depends on an order of the factors \(M_1\), ..., \(M_n\). Using different orders one obtains all factorizations of \(Q'\). In general (if the factors \(M_1\), ..., \(M_n\) are pairwise different), there are n! factorizations (c. f. Hegedüs et al. (2013)), which proves Part (c). \(\square \)
2.2 A necessary condition for bivariate factorization
In contrast to the univariate case, a generic bivariate polynomial \(Q \in {\mathbb {H}}[t,s]\) does not admit a factorization with univariate linear factors.
Definition 2.2
Let \(Q \in {\mathbb {H}}[t,s]\). We say that Q satisfies the necessary factorization condition if \(Q {Q}^*=PR\) for \(P \in {\mathbb {R}}[t]\) and \(R \in {\mathbb {R}}[s]\).
In order to see that this condition is really necessary for existence of a factorization with univariate linear factors, assume that Q can be written as
with \(u_i \in \{t, s\}\) and a, \(h_i \in {\mathbb {H}}\) for \(i \in \{1,\ldots ,n\}\). The norm polynomial is then
Here we repeatedly used the fact that \((u_i-h_i){(u_i-h_i)}^*\) is a real polynomial and commutes with all other polynomials. Moreover, \((u_i-h_i){(u_i-h_i)}^*\) is in \({\mathbb {R}}[t]\) or \({\mathbb {R}}[s]\) from which the claimed factorization \(Q {Q}^* = PR\) of the necessary factorization condition follows.
3 Factorization of star-one-polynomials
Inspired by Skopenkov and Krasauskas (2019) and motivated by potential applications in kinematics, we consider polynomials \(Q \in {\mathbb {H}}_{*1}\) which admit a factorization into univariate linear factors. An important result, which is more or less stated in Skopenkov and Krasauskas (2019), is that the necessary factorization condition of Definition 2.2 is also sufficient for polynomials in \({\mathbb {H}}_{*1}\). It is not sufficient for arbitrary polynomials in \({\mathbb {H}}[t,s]\) by (Skopenkov and Krasauskas 2019, Example 1.5) (taken from Beauregard (1993)). If a factorization exists, we will show that it is in general essentially unique (that is, unique up to obvious ambiguities arising from different factorizations of univariate polynomials). Let us continue by stating an important result of Skopenkov and Krasauskas (2019).
Theorem 3.1
(Skopenkov and Krasauskas 2019, Lemma 2.9). If polynomials \(Q \in {\mathbb {H}}_{*1}\) and P, \(R \in {\mathbb {R}}[t,s]\) satisfy \(Q {Q}^*=PR\), then either (P, Q, R) or (R, Q, P) equals \(((AC) {(AC)}^*D,\) ABCD, \(B {B}^*D)\) for some A, \(C \in {\mathbb {H}}[t]\), \(B \in {\mathbb {H}}[t,s]\), \(D \in {\mathbb {R}}[t,s]\).
The proof of Theorem 3.1 in Skopenkov and Krasauskas (2019) is constructive and can be cast into an algorithm. As a corollary to Theorem 3.1 we will prove that the necessary factorization condition is also sufficient for polynomials \(Q \in {\mathbb {H}}_{*1}\).
Corollary 3.2
For \(Q \in {\mathbb {H}}_{*1}\) the necessary factorization condition is also sufficient.
Proof
As shown in Sect. 2, it is no loss of generality to assume that Q is monic with \(\gcd (Q)=1\). Otherwise, we find a representation \(Q=\gcd (Q)Q'\) with \(Q' \in {\mathbb {H}}_{*1}\). Validity of the necessary factorization condition guarantees that the real polynomial \(\gcd (Q)\) can be decomposed into univariate polynomials that admit factorizations over \({\mathbb {H}}\) by Theorem 2.1, Part (a). Therefore, this factor is negligible and we only have to consider polynomials without real polynomial factors of positive degree.
Since \(Q {Q}^* = PR\) with \(P \in {\mathbb {R}}[t]\) and \(R \in {\mathbb {R}}[s]\) we can apply Theorem 3.1 and obtain
By the assumption \(\gcd (Q) = 1\), D has to be constant. Since \(R \in {\mathbb {R}}[s]\), we obtain \(B \in {\mathbb {H}}[s]\). Moreover, \(\deg B \le 1\) because \(Q \in {\mathbb {H}}_{*1}\). Hence \(Q=ABC\) with univariate factors \(A, C \in {\mathbb {H}}[t]\) and \(B \in {\mathbb {H}}[s]\). Without loss of generality, we may assume that A, B and C are monic. If one of the polynomials, say C, is not monic, we write \(C=cC'\), where \(C' \in {\mathbb {H}}[t]\) is monic and c is the leading coefficient of C. By replacing each coefficient \(a_i\) of A (respectively \(b_i\) of B) by \(c^{-1}a_ic\) (respectively \(c^{-1}b_ic\)) and again denoting the thus obtained polynomials by A and B, we find a representation \(Q=cABC'\) with monic \(C' \in {\mathbb {H}}[t]\). Similar ideas can be applied to A and B so that \(Q=qA'B'C'\) for an appropriate \(q \in {\mathbb {H}}\) and monic polynomials \(A',C' \in {\mathbb {H}}[t]\), \(B' \in {\mathbb {H}}[s]\). Since Q is monic, we conclude \(q=1\). Factorizing A and C according to Theorem 2.1, Part (c) yields the desired result. \(\square \)
Remark 3.3
In our short proof of Corollary 3.2 we appeal to Skopenkov and Krasauskas (2019) and known factorization results as illustrated in Sect. 2.1. We would like to mention that already the proof of Theorem 3.1 in Skopenkov and Krasauskas (2019) is constructive and inductively produces linear univariate left/right factors of Q.
4 Equivalence of factorizations
So far we have considered existence of factorizations. Before turning to their uniqueness or non-uniqueness we develop a sensible concept of equivalence of factorizations. An obvious source of non-uniqueness of factorizations of \(Q \in {\mathbb {H}}_{*1}\) is the potential non-uniqueness of factorizations of univariate factors of Q (c. f. Theorem 2.1, Part (c)). It seems natural to consider two factorizations obtained in this way as equivalent. Definition 4.1 below provides us with a criterion for this equivalence relation which will be needed later. By \(\mathrm {fact}(Q)\) we denote the set of all possible factorizations of Q into univariate linear factors. For better readability let us introduce the following notation for elements of \(\mathrm {fact}(Q)\):
with \(h_i\), h, \(k_j \in {\mathbb {H}}\), \(i=1,\ldots ,n\), \(j = 1, \ldots , m\). Note that \((F_{h_i,h,k_j})_{n,m}\) refers to a factorized representation of a polynomial, not the polynomial itself. Formally, one can think of \((F_{h_i,h,k_j})_{n,m}\) as a \((n+1+m)\)-tuple of linear polynomial factors. By virtue of the usual convention that the value of an empty product equals one, we also write \((F_{h_i,h,k_j})_{0,m}\) and \((F_{h_i,h,k_j})_{n,0}\) for factorizations of the form \((s-h)(t-k_1)\cdots (t-k_m)\) and \((t-h_1)\cdots (t-h_n)(s-h)\).
Definition 4.1
For a monic star-one-polynomial \(Q \in {\mathbb {H}}_{*1}\) with \(\gcd (Q)=1\) we consider the equivalence relation
on \(\mathrm {fact}(Q)\). By \(\mathrm {Fact}(Q) :=\mathrm {fact}(Q)/\sim \) we denote the corresponding quotient set.
Remark 4.2
Note that (3) implies
Thus, Definition 4.1 is actually symmetric in the factors to the left and to the right of the s-factor. In case of \(n = 0\) or \(l = 0\), the empty product convention applies.
As already mentioned, the equivalence relation of Definition 4.1 aims at identifying factorizations which arise from different factorizations of the univariate polynomials \((t-h_1)\cdots (t-h_n) \in {\mathbb {H}}[t]\) and \((t-k_1)\cdots (t-k_m) \in {\mathbb {H}}[t]\). This needs a justification:
Proposition 4.3
Let \(Q \in {\mathbb {H}}_{*1}\) be a monic star-one-polynomial with \(\gcd (Q) = 1\) and consider two representatives \((F_{h_i,h,k_j})_{n,m}\), \((F_{\hat{h}_i,\hat{h},\hat{k}_j})_{l,r}\) of the same equivalence class \([(F_{h_i,h,k_j})_{n,m}]=[(F_{\hat{h}_i,\hat{h},\hat{k}_j})_{l,r}] \in \mathrm {Fact}(Q)\). Then \(n=l\), \(m=r\), \(h = \hat{h}\), \((t-h_1)\cdots (t-h_n) = (t-\hat{h}_1)\cdots (t-\hat{h}_l)\) and \((t-k_1)\cdots (t-k_m) = (t-\hat{k}_1)\cdots (t-\hat{k}_r)\), that is, the two factorizations arise from different factorizations of univariate polynomials.
Proof
It is clear that \(l=n\) and \(r=m\). Write
with \(P_1 {P_1}^*=\hat{P}_1 {\hat{P}_1}^*\) and \(P_2 {P_2}^*=\hat{P}_2 {\hat{P}_2}^*\). Without loss of generality, we may assume \((t-\hat{h}_i) {(t-\hat{h}_i)}^*=(t-h_i) {(t-h_i)}^*=:M_i\) for \(i \in \{1,\ldots ,n\}\) and \((t-\hat{k}_j) {(t-\hat{k}_j)}^*=(t-k_j) {(t-k_j)}^*=:N_j\) for \(j \in \{1,\ldots ,m\}\). If that is not the case, we can compute different factorizations of \(\hat{P}_1\) and \(\hat{P}_2\) where the factors appear in the desired order (c. f. Theorem 2.1, Part (c); note that \(\gcd (Q) = 1\) implies \(\gcd (\hat{P}_1) = \gcd (\hat{P}_2) = 1\)).
There exist polynomials \(Q_0\), \(Q_1 \in {\mathbb {H}}[t]\) with \(Q = Q_0 + sQ_1\). We have
and hence \(t-k_m\) and \(t-\hat{k}_m\) are right factors of \(Q_1\) as well as of \(N_m\). Such right factors are uniquely determined, that is \(k_m = \hat{k}_m\), as long as \(N_m \not \mid Q_1\) (c. f. Hegedüs et al. 2013, Lemma 3). If \(N_m \mid Q_1\), we pass over to
If \(N_m \mid Q_0\), then \(N_m \mid Q\), a contradiction to \(\gcd (Q) = 1\). Hence \(N_m \not \mid Q_0\) and – by applying the same ideas to \(Q_0\) – we obtain \(k_m=\hat{k}_m\).
Now it is possible to cancel out the factor \(t-k_m\) from \(Q_0\), \(Q_1\) and also from Q to obtain polynomials \(Q'_0\), \(Q'_1\), \(Q' = Q'_0 + sQ'_1\). Proceeding inductively with \(Q'\) instead of Q we obtain \(k_j = \hat{k}_j\) for \(j \in \{1,\ldots ,m\}\). A similar argument for left factors then yields \(h_l = \hat{h}_l\) for \(l \in \{1,\ldots ,n\}\). This also implies \(h = \hat{h}\) and the lemma’s claim follows. \(\square \)
5 Factorizations and null lines
In this section, we assume that the monic polynomial \(Q \in {\mathbb {H}}_{*1}\) with \(\gcd (Q)=1\) admits a factorization, that is
with \(h_1,\ldots , h_n\), h, \(k_1,\ldots ,k_m \in {\mathbb {H}}\). In the following, we develop a criterion to decide whether this factorization is essentially unique, that is, whether there exists only one equivalence class of factorizations. We call each linear polynomial \(t-h_i\), \(i=1,\ldots ,n\), a left factor of factorization (4) since it arises as a factor on the left-hand side of the s-factor \(s-h\). Analogously, each linear polynomial \(t-k_i\), \(i=1,\ldots ,m\), is called a right factor of factorization (4).
For \(i=1,\ldots ,n\) we define
Analogously, for \(j=1,\ldots ,m\) we set
It holds that
Moreover, for \(i=1,\ldots ,n\) and \(j=1,\ldots ,m\) the polynomials \(M_i\) and \(N_j\) are monic and irreducible in \({\mathbb {R}}[t]\) and \(\deg M_i=2=\deg N_j\).
A polynomial \(Q = Q_0 + sQ_1 \in {\mathbb {H}}_{*1}\) gives rise to a ruled surface in \({\mathbb {P}}({\mathbb {C}}{\mathbb {H}})\) which is parameterized asFootnote 2
The s-parameter lines are the surface rulings. It will turn out that existence of a factorization of Q, its essential uniqueness and also the number of left and right factors are related to special rulings on this surface, namely rulings that lie on the null quadric:
Definition 5.1
Consider the symmetric bilinear form b defined as
The quadric \({\mathcal {N}} \subseteq {\mathbb {P}}({\mathbb {C}}{\mathbb {H}})\) represented by this bilinear form is called null quadric. The points of \({\mathcal {N}}\) are precisely the elements \([h] \in {\mathbb {P}}({\mathbb {C}}{\mathbb {H}})\) with \(b(h,h) = h {h}^*=0\), that is, elements in \({\mathbb {P}}({\mathbb {C}}{\mathbb {H}})\) represented by complex quaternions with zero norm. Lines in \({\mathcal {N}}\) are called null lines.
Let us fix a complex number \(z \in {\mathbb {C}}={\mathbb {R}}+\mathrm {i}{\mathbb {R}}\). For \(i=1,2\), we view \(Q_i \in {\mathbb {H}}[t]\) as an element of \({\mathbb {C}}{\mathbb {H}}[t]\) and define the evaluation \(Q_i(z) \in {\mathbb {C}}{\mathbb {H}}\) by replacing the indeterminate t by z. This substitution is uncritical since z commutes with all elements in \({\mathbb {C}}{\mathbb {H}}\).
Consider the projective span \([Q_0(z)] \vee [Q_1(z)]\) which is parameterized by
The projective span \([Q_0(z)] \vee [Q_1(z)]\) is either a straight line or degenerates to a point if \([Q_0(z)] = [Q_1(z)]\). Moreover, it may happen that one of the quaternions, \(Q_0(z)\) or \(Q_1(z)\), equals 0. If that is the case, we also use the notation \([Q_0(z)] \vee [Q_1(z)]\) even though we actually just consider the point \([Q_1(z)]\) or \([Q_0(z)]\).
It will turn out to be advantageous to classify null lines. It is known that the null quadric \({\mathcal {N}}\) is covered by two families of straight lines. Elements of the first family \({\mathcal {L}}\) are called left rulings, elements of the second family \({\mathcal {R}}\) are called right rulings. Any null line is either a left ruling or a right ruling of \({\mathcal {N}}\). For more details we refer to (Casas-Alvero 2014, Theorem 8.3.2.). Each point \([h] \in {\mathcal {N}}\) is incident with exactly one left ruling \(L_{[h]}\) and exactly one right ruling \(R_{[h]}\). In Siegele et al. (2020) it is shown that these two straight lines are given by
The equations \(q{h}^*=0\) and \({h}^*q=0\) are not equivalent since multiplication of quaternions is not commutative. The two lines \(L_{[h]}\) and \(R_{[h]}\) are indeed different.
If \(z \in {\mathbb {C}}\) is a complex zero of the norm polynomial’s univariate factor \(P \in {\mathbb {R}}[t]\), we obtain
and hence the projective span \([Q_0(z)] \vee [Q_1(z)]\) is (at least contained in) a null line. (Note that \(Q_0(z) = Q_1(z) = 0\) is not possible because of the assumption \(\gcd (Q) = 1\).) The following theorem provides a more precise geometric interpretation for the zeros of P in terms of left and right rulings. Note the careful formulation “contained in a left/right ruling”. It leaves open the possibility that \([Q_0(z)] \vee [Q_1(z)]\) is just a point.
Theorem 5.2
Assume that a monic polynomial \(Q=Q_0+sQ_1 \in {\mathbb {H}}_{*1}\) with \(\gcd (Q)=1\) admits a factorization of the form (4). Moreover, let \(M_i\), \(i=1,\ldots ,n\), \(N_j\), \(j=1,\ldots ,m\), and P be defined as in (5), (6) and (7). Let \(z \in {\mathbb {C}}\) be a complex zero of P.
-
(a)
If there exists \(j \in \{1, \ldots , m\}\) such that \(N_j(z)=0\), then \([Q_0(z)] \vee [Q_1(z)]\) is contained in a left ruling.
-
(b)
If there exists \(i \in \{1,\ldots ,n\}\) such that \(M_i(z)=0\), then \([Q_0(z)] \vee [Q_1(z)]\) is contained in a right ruling.
Proof
Let us first consider Part (a). There is nothing to show if \([Q_0(z)] \vee [Q_1(z)]\) is just a point. Hence, we can assume that \([Q_0(z)]\) and \([Q_1(z)]\) are two distinct points. We want to show that \([Q_1(z)]\) lies on the unique left ruling through \([Q_0(z)]\). By the defining condition (9) for left rulings, this is equivalent to \(Q_1(z){Q_0}^*(z)=0\) (we use the denotation \({Q_0}^*(z)={(Q_0(z))}^*\)).
Because Q admits a factorization of the form (4), we have
(we already used these representations in the proof of Proposition 4.3). Hence
Evaluating at z yields \(Q_1(z){Q_0}^*(z) = 0\) since \(N_j(z) = 0\). Similarly, one can show that \(M_i(z) = 0\) implies \({Q_0}^*(z)Q_1(z) = 0\) which proves Part (b) of the theorem. \(\square \)
Theorem 5.2 can be interpreted as follows: Each single left factor of factorization (4) gives rise to two conjugate complex parameter values z, \({\overline{z}} \in {\mathbb {C}}\) with \([Q_0(z)] \vee [Q_1(z)]\) (resp. \([Q_0({\overline{z}})] \vee [Q_1({\overline{z}})]\)) being contained in a right ruling. Similarly, right factors of (4) lead to (points on) left rulings.
The algebraic criterion for \([Q_0(z)] \vee [Q_1(z)]\) being contained in a left/right ruling is the vanishing of \(Q_1(z){Q_0}^*(z)\) and \({Q_0}^*(z)Q_1(z)\), respectively. Denote by
the sets of complex zeros of the polynomials \(Q_1{Q_0}^*\) and \({Q_0}^*Q_1\). We say that the multiplicity \({\text {mult}}(H,z)\) of \(z \in {\mathbb {C}}\) as a zero of \(H \in {\mathbb {H}}[t]\) equals \(\mu \) if \((t-z)^\mu \) divides H in \({\mathbb {C}}{\mathbb {H}}[t]\) and \((t-z)^{\mu +1}\) does not. Since \((t-z)\) is part of the center of \({\mathbb {C}}{\mathbb {H}}[t]\), we need not distinguish between left- and right-division.
Let us briefly explain why \(H(z)=0\) is equivalent to \((t-z)\) dividing H in \({\mathbb {C}}{\mathbb {H}}[t]\): Write \(H=H_0+\mathbf {i}H_1+ \mathbf {j}H_2 + \mathbf {k}H_3\), where \(H_i \in {\mathbb {R}}[t]\) for \(i=0,1,2,3\). The fact \(H(z)=0\) implies \(H_i(z)=0\). Since \(H_i \in {\mathbb {R}}[t]\) is a real polynomial, we can find \(H_i' \in {\mathbb {C}}[t]\) such that \(H_i=H_i'(t-z)\), whence \(H=H'(t-z)\) with \(H'=H_0'+\mathbf {i}H_1' + \mathbf {j}H_2' + \mathbf {k}H_3'\). If \((t-z)\) divides H in \({\mathbb {C}}{\mathbb {H}}[t]\), it also divides \(H_i\) in \({\mathbb {C}}[t]\), which implies \(H_i(z)=0\) and hence \(H(z)=0\).
Write \(\lambda (z) :={\text {mult}}(Q_1{Q_0}^*,z)\) and \(\varrho (z) :={\text {mult}}({Q_0}^*Q_1,z)\). We then define the multiplicity cardinalities
Remark 5.3
Under the assumptions of Theorem 5.2 we define \(N :=N_1\cdots N_m\) and \(M :=M_1\cdots M_n\). From equation (11) it follows that
and similarly
Moreover, the \(\deg N=2m\) complex zeros of N (counted with multiplicities) are elements of A and the \(\deg M=2n\) complex zeros of M (counted with multiplicities) are elements of B, which shows that the multiplicity cardinalities \(\#A\) and \(\#B\) are bounded from below by
The lower bounds (14) need not be strict:
Example 5.4
For \(Q = (t-\mathbf {i})(s-\mathbf {j})(t-\mathbf {j})\) we have
Therefore, \(m = n = 1\), \(A = B = \{\pm \mathrm {i}\}\), \(\lambda (\pm \mathrm {i}) = 1\), \(\varrho (\pm \mathrm {i}) = 2\) and hence \(\#A = 2 = 2m\) but \(\#B = 4 > 2n\).
It is natural to relate the algebraic multiplicities \(\lambda (z)\) and \(\varrho (z)\) to multiplicities of left/right rulings on the ruled surface Q.
Via the Klein mapping \(\gamma \) (c. f. Pottmann and Wallner 2010, Sect. 2.1), straight lines in \({\mathbb {P}}^3\) are mapped to points of the Plücker quadric in \({\mathbb {P}}^5\). Ruled surfaces are mapped to curves such that the intersection multiplicity of ruled surfaces at lines can be based on the concept of intersection multiplicity of curves from projective differential geometry. If \([Q_0(z)] \vee [Q_1(z)]\) is a straight line, then \(\gamma ([Q_0(z)] \vee [Q_1(z)])\) is a point on the Plücker quadric. Moreover, the Klein images \(\gamma ({\mathcal {L}})\), \(\gamma ({\mathcal {R}})\) of left/right rulings are conics on the Plücker quadric. Provided \([Q_0(z)] \vee [Q_1(z)]\) is a straight line, we can therefore consider the intersection of the rational curve \(\gamma (Q)\) with \(\gamma ({\mathcal {L}})\) (or with \(\gamma ({\mathcal {R}})\)) at the point \(\gamma ([Q_0(z)] \vee [Q_1(z)])\) and compute its intersection multiplicity. One can show that \(\gamma (Q)\) intersects \(\gamma ({\mathcal {L}})\) with intersection multiplicity \(\mu \) in \([Q_0(z)] \vee [Q_1(z)]\) if and only if \((t-z)^\mu \) is a factor of \(Q_1{Q_0}^*\), that is, \(\mu = \lambda (z)\) (c. f. Siegele et al. 2020, Proof of Theorem 3). If \([Q_0(z)] \vee [Q_1(z)]\) is just a point, one can still compute the algebraic multiplicities \(\lambda (z)\) and \(\varrho (z)\), but the geometric interpretation of multiplicities in terms of left/right rulings is difficult to sustain.
6 Uniqueness of factorizations
With the help of the multiplicity cardinalities \(\#A\) and \(\#B\) we are now able to state a condition which guarantees essential uniqueness of a factorization of Q.
Theorem 6.1
(Uniqueness Theorem) Let \(Q=Q_0+sQ_1 \in {\mathbb {H}}_{*1}\), \(\gcd (Q)=1\) and \(Q {Q}^* = PR\) with \(P \in {\mathbb {R}}[t]\) and \(R \in {\mathbb {R}}[s]\). Moreover, let \(\#A\) and \(\#B\) be the multiplicity cardinalities defined in (13). Then \(\deg P = \#A + \#B\) implies \(\vert \mathrm {Fact}(Q)\vert = 1\).
Proof
The assumptions guarantee existence of one factorization \((F_{h_i,h,k_j})_{n,m}\) of Q of shape (4). Hence \(\deg P= 2(m+n)\) and the equality \(\deg P=\# A+\# B\) implies \(\# A=2m\) and \(\# B=2n\). (Note that \(\# A \ge 2m\) and \(\# B \ge 2n\) is always satisfied by Remark 5.3.)
Suppose there exists a second factorization
such that \([(F_{h_i,h,k_j})_{n,m}] \ne [(F_{\hat{h}_i,\hat{h},\hat{k}_j})_{l,r}]\). By definition of (non)-equivalence,
and also
(we already defined the polynomials M and N in Remark 5.3). From (16) and (17) one already obtains the decompositions of M, \(\hat{M}\), N and \(\hat{N}\) into monic irreducible real factors. There are two possible cases which ought to lead to the inequality \(M \ne \hat{M}\):
Case 1: There exists an irreducible factor \(\hat{M}_i :=(t-\hat{h}_i) {(t-\hat{h}_i)}^*\) of \(\hat{M}\) which occurs with higher power in the irreducible factor decomposition of \(\hat{M}\) than in the one of M. More precisely, if \(z \in {\mathbb {C}}\) is a zero of \(\hat{M}_i\), we have \({\text {mult}}(M,z)<{\text {mult}}(\hat{M},z)\).
Let us again use representation (10) for the polynomials \(Q_0\) and \(Q_1\). Then we have \({Q_0}^*Q_1 = HM\) where
For each \(z \in B\) it holds that \(H(z) \ne 0\). Indeed, \(H(z)=0\) would imply \(\# B > 2n\) since each of the \(\deg M=2n\) complex zeros of M (counted with multiplicities) is an element of B (c. f. Remark 5.3). Therefore, one actually obtains \(\varrho (z) = {\text {mult}}(M,z)\).
Let us cause a contradiction by using factorization (15): This factorization yields another description of the polynomials \(Q_0\) and \(Q_1\):
We obtain \({Q_0}^*Q_1 = \hat{H}\hat{M}\) where
which implies the contradiction \(\varrho (z) \ge {\text {mult}}(\hat{M},z)>{\text {mult}}(M,z)=\varrho (z)\).
Case 2: There exists an irreducible factor \(M_i :=(t-h_i) {(t-h_i)}^*\) of M and \(z \in {\mathbb {C}}\) such that \({\text {mult}}(\hat{M},z)<{\text {mult}}(M,z)\). But then \({\text {mult}}(\hat{N},z)>{\text {mult}}(N,z)\) and we can proceed analogously by using the representation \(Q_1{Q_0}^*=KN\) with
and the fact that \(\# A=2m\). \(\square \)
Remark 6.2
The converse of Theorem 6.1 is also true. If \(|\mathrm {Fact}(Q)|=1\), we obtain \(\deg (P)=\#A+\#B\). However, this is not yet obvious and we need further preparations to be able to formulate and prove the statement (c.f. Theorem 7.3 in Sect. 7).
Corollary 6.3
Suppose that \(Q \in {\mathbb {H}}_{*1}\) satisfies the assumptions of Theorem 6.1. If \([Q_0(z)] \vee [Q_1(z)]\) is a straight line for all zeros \(z \in {\mathbb {C}}\) of the norm polynomial’s univariate t-factor \(P \in {\mathbb {R}}[t]\), then \(\vert \mathrm {Fact}(Q)\vert =1\).
Proof
Since \([Q_0(z)] \vee [Q_1(z)]\) is a straight line for all zeros z of P, the sets A and B are disjoint. Therefore, each zero of P is either contained in A or in B. More precisely,
and the statement follows from Theorem 6.1. \(\square \)
Theorem 6.1 provides us with a sufficient test whether a factorization of Q is essentially unique. We can compute the multiplicity cardinalities \(\#A\) and \(\#B\) of the sets A and B, respectively, whence \(\deg P = \#A + \#B\) implies \(\vert \mathrm {Fact}(Q)\vert = 1\).
The elements of A and B are the complex numbers \(z \in {\mathbb {C}}\) determined by (12), the multiplicity cardinalities are the sums of multiplicities \(\lambda (z) = {\text {mult}}(Q_1{Q_0}^*,z)\) and \(\varrho (z) = {\text {mult}}({Q_0}^*Q_1,z)\) for \(z \in A\) and \(z \in B\), respectively. We illustrate this at hand of a couple of examples. The first example demonstrates that the converse of Corollary 6.3 is not true.
Example 6.4
For
we have \(A = B = \{\pm \mathrm {i} \}\) and \(\lambda (\pm \mathrm {i}) = \varrho (\pm \mathrm {i}) = 1\). Hence \(\deg P=4=\#A+\#B\) where \(P \in {\mathbb {R}}[t]\) again denotes the norm polynomial’s univariate t-factor. The factorization is essentially unique by Theorem 6.1. It is given by \(Q = (t - \mathbf {i}) (s - \mathbf {j}) (t - \mathbf {k})\) (and trivially unique because we only have one left factor and one right factor). However,
so that \([Q_0(\pm \mathrm {i})] \vee [Q_1(\pm \mathrm {i})]\) is just a point.
Example 6.5
The norm of the polynomial
equals
which shows that the necessary factorization condition is satisfied. Hence Q admits a factorization into univariate linear factors. By computing A and B as defined in (12), we see that \(\#A = 4\) and \(\#B = 4\). In total, \(\deg P = 8 = \#A+\#B\), which shows that the factorization is essentially unique and the position of the s-factor is unique. Moreover, the fact \(\#A=4\) and \(\#B=4\) implies that any factorization of Q is of the form
for appropriate quaternions \(h_1\), \(h_2\), h, \(k_1\), \(k_2 \in {\mathbb {H}}\) and all factorizations of Q are obtained from all factorizations of the univariate polynomials \((t-h_1)(t-h_2)\) and \((t-k_1)(t-k_2)\).
Example 6.6
Consider the polynomial
Its norm polynomial factors as
whence \(\deg P=6\). Moreover, \(A=B=\{\pm \mathrm {i}\}\) and \(\#A = 4\), \(\#B=2\). We therefore obtain a factorization with one left factor and two right factors. The two right factors share the same norm polynomial, whence the factorization is even unique and not just essentially unique (c. f. Sect. 2.1). It is given by
Example 6.7
The polynomial
satisfies the necessary factorization condition
The multiplicity cardinalities are \(\#A=4\), \(\#B=4\) whence \(\deg P = 6 < \#A+\#B\). Indeed, we will see that this property implies existence of non-equivalent factorizations (c. f. Example 7.2).
7 Non-uniqueness of factorizations
A polynomial \(Q \in {\mathbb {H}}_{*1}\) admits a factorization if it satisfies the factorization condition of Definition 2.2. By Theorem 6.1 the factorization is in general essentially unique, that is, the set \(\mathrm {Fact}(Q)\) of equivalence classes consists of only one element. However, exceptions do exist. We study this in the simple case of \(Q \in {\mathbb {H}}_{11}\).
Example 7.1
Consider the polynomial \(Q = (t-h)(s-k) \in {\mathbb {H}}_{11}\) with h, \(k \in {\mathbb {H}}\). A second factorization is necessarily of the shape \(Q = (s-\hat{k})(t-\hat{h})\). Equating and expanding gives
Now we compare coefficients and find \(h = \hat{h}\), \(k = \hat{k}\) and \(hk = \hat{k}\hat{h} = kh\). Thus, a second factorization exists if and only if h and k commute.
Building on this example we see that if a polynomial \(Q \in {\mathbb {H}}_{*1}\) admits the factorization
then commutativity of \(h_n\) and h (or h and \(k_1\)) implies existence of a second, non-equivalent, factorization. However, one may find examples where non-equivalent factorizations do not arise in this simple way, at least not obviously.
Example 7.2
We again consider the polynomial Q of Example 6.7. It satisfies the necessary factorization condition. By Corollary 3.2, Q completely decomposes into univariate linear factors, for instance:
Another factorization of Q is given by
Still, \(s-\mathbf {i}-\mathbf {j}\) does not commute with any t-factor in (19) or (20). Obviously, the two factorizations are not equivalent.
As we have seen in Sect. 6, non-uniqueness of factorizations of Q is only possible if \(\deg P < \#A + \#B\) where P denotes the norm polynomial’s univariate t-factor and \(\#A\) and \(\#B\) are the multiplicity cardinalities. It turns out that this necessary condition for existence of non-equivalent factorizations is also sufficient.
Theorem 7.3
(Non-Uniqueness Theorem) Let \(Q=Q_0+sQ_1 \in {\mathbb {H}}_{*1}\), \(\gcd (Q)=1\) and \(Q {Q}^* = PR\) with \(P \in {\mathbb {R}}[t]\) and \(R \in {\mathbb {R}}[s]\). Moreover, let \(\#A\) and \(\#B\) be the multiplicity cardinalities defined in (13). Then the following statements are equivalent:
-
(a)
\(\vert \mathrm {Fact}(Q)\vert >1\).
-
(b)
\(\deg P < \#A + \#B\).
Proof
The assumptions guarantee existence of one factorization \((F_{h_i,h,k_j})_{n,m}\) of Q of shape (4). By Theorem 6.1, (a) implies \(\deg P \ne \#A + \#B\). Statement (b) then follows from \(\deg P=2(m+n) \le \#A+\#B\).
Let us prove that (b) implies (a). From \(\deg P = 2(m+n) < \#A + \#B\) we infer \(\#A > 2m\) or \(\#B > 2n\). Let us assume \(\#B > 2n\). The elements of B are precisely the complex zeros of \({Q_0}^*Q_1\). Let us again use the representation \({Q_0}^*Q_1=HM\) with
where \(M_i :=(t-h_i) {(t-h_i)}^*\). Since \(\deg M=2n\), \(\#B>2n\) implies existence of at least one \(z \in B\) satisfying \(H(z)=0\). But then we also obtain \(H({\overline{z}})=0\), where \({\overline{z}}\) denotes the complex conjugate of z. This is due to the fact that \(H(z)=0\) is equivalent to \(H_i(z)=0\) for \(i=0,1,2,3\), where \(H=H_0+\mathbf {i}H_1 + \mathbf {j}H_2 + \mathbf {k}H_3\) (we already used this representation in the paragraph following equation (12)). However, \(H_i \in {\mathbb {R}}[t]\) is a real polynomial, therefore \(H_i(z)=0\) also implies \(H_i({\overline{z}})=0\). As a consequence, we obtain \(H({\overline{z}})=0\). Hence
where \(l = {\text {mult}}(H,z)\), \(l \ge 1\), \(N :=(t-z)(t-{\overline{z}}) \in {\mathbb {R}}[t]\) and \(K \in {\mathbb {H}}[t]\) with \(N \not \mid K\).
The class \([(F_{h_i,h,k_j})_{n,m}]\) of equivalent factorizations contains one element where N is the norm polynomial of the leftmost right factors (the t-factors immediately following the s-factor). More precisely, there exists \(r \in \{1,\ldots ,m\}\) such that \((t-k_i) {(t-k_i)}^*=N\) for \(i =1, \ldots ,r\) and \((t-k_j) {(t-k_j)}^*\ne N\) for \(j = r+1,\ldots ,m\). It is no loss of generality to assume that this is the given factorization \((F_{h_i,h,k_j})_{n,m}\) of Q.
Consider the product
This factorization into univariate linear factors is unique because all linear factors have the same norm polynomial (c. f. Theorem 2.1, Part (c)). From (21) we obtain \(N^lK = EF\) where \(E :=-{(t-k_m)}^*\cdots {(t-k_1)}^* {h}^*\) and \(F :=(t-k_1)\cdots (t-k_m)\). By shifting \({h}^*\) to the left-hand side of the factorization, we get \(E = -{h}^*(t-{(hk_mh^{-1})}^*)\cdots (t-{(hk_1h^{-1})}^*)\). Neither E nor F have a real polynomial factor of positive degree. Indeed, existence of such a factor would imply \(\gcd (Q)\ne 1\). However, \(N^l\) is a factor of EF. By (Cheng and Sakkalis 2016, Proposition 2.1), this is only possible if l linear right factors of E are conjugate to l linear left factors of F and \(N^l\) is the product of these factors. Due to the uniqueness of factorization (22), we obtain
for \(i \in \{1,\ldots ,l\}\). Therefore,
Hence \(s-h\) commutes with \(t-k_1\), ..., \(t-k_l\). By letting some of these t-factors commute with the s-factor, one obtains another non-equivalent factorization.
If \(\#A>2m\), we can argue similarly and see that \(s-h\) commutes with at least one left factor. \(\square \)
According to Theorem 7.3, \(\vert \mathrm {Fact}(Q)\vert > 1\) implies that each equivalence class in \(\mathrm {Fact}(Q)\) can be represented by a factorization \((F_{h_i,h,k_j})_{n,m}\) where either \(t-h_n\) and \(s-h\) commute or \(s-h\) and \(t-k_1\) commute. If \(t-h_n\) and \(s-h\) commute, then \((F_{h_i,h,\hat{k}_j})_{n-1,m+1}\) with \(\hat{k}_1 = h_n\) and \(\hat{k}_l = k_{l-1}\) for \(l \in \{2,\ldots ,m+1\}\) is a new (non-equivalent) factorization. We call the transition from \([(F_{h_i,h,k_j})_{n,m}]\) to \([(F_{h_i,h,\hat{k}_j})_{n-1,m+1}]\) a left jump of the s-factor. Similar statements hold true for commuting factors \(s-h\) and \(t - k_1\). In this case we speak of a right jump of the s-factor. Let us demonstrate the statements of Theorem 7.3 by means of an example.
Example 7.4
Consider the polynomial
Its norm polynomial is given by
From (23) we obtain \(n=3\) and \(m=1\). Moreover, \(\#A=6>2m\), \(\#B=6=2n\) and \(\deg P < \#A + \#B\). Hence, by Theorem 7.3, \(\vert \mathrm {Fact}(Q)\vert >1\). Let us precisely investigate the elements of set A. It holds that
The right factor \(t-\mathbf {i}-\mathbf {j}+\mathbf {k}\) corresponds to the complex numbers \(\sqrt{3}\mathrm {i}\) and \(-\sqrt{3}\mathrm {i}\) (we have \((t-\mathbf {i}-\mathbf {j}+\mathbf {k}) {(t-\mathbf {i}-\mathbf {j}+\mathbf {k})}^*=t^2+3\)). Moreover, \(\lambda (\pm \sqrt{3}\mathrm {i})=1\). Consequently, \(s-2\mathbf {k}\) does not perform a left jump by commuting with a left factor of norm \(t^2+3\).
Let us now consider the elements \(\mathrm {i},-\mathrm {i} \in A\). It holds that \(\lambda (\pm \mathrm {i})=2\). There does not exist a right factor of factorization (23) with norm polynomial \(t^2+1\). Therefore, two left jumps of the s-factor are possible. Following the proof of Theorem 7.3, we compute another (equivalent) factorization of Q where the two rightmost left factors have norm polynomial \(t^2+1\). The respective factors commute with \(s-2\mathbf {k}\):
Indeed, \((t-\mathbf {k})(s-2\mathbf {k})=(s-2\mathbf {k})(t-\mathbf {k})\). Further equivalence classes of factorizations of Q can be found in this way, that is
By Theorem 7.6 below, these are all elements of \(\mathrm {Fact}(Q)\).
In Corollary 6.3 we provided a geometric condition which guarantees uniqueness of a factorization of Q: If \([Q_0(z)] \vee [Q_1(z)]\) is a straight line for all zeros \(z \in {\mathbb {C}}\) of the norm polynomial’s univariate factor \(P \in {\mathbb {R}}[t]\), we obtain \(\vert \mathrm {Fact}(Q)\vert =1\). However, as shown in Example 6.4, the converse need not be true. Nevertheless, it turns out to be true if we require an additional assumption to be satisfied:
Corollary 7.5
Let \(Q \in {\mathbb {H}}_{*1}\) satisfy the assumptions of Theorem 7.3. Define the polynomials M and N according to (16) and (17) and suppose that \(\gcd (M,N)=1\). If there exists a zero \(z \in {\mathbb {C}}\) of the norm polynomial’s univariate t-factor \(P \in {\mathbb {R}}[t]\) such that \([Q_0(z)] \vee [Q_1(z)]\) is just a point, we obtain \(\vert \mathrm {Fact}(Q)\vert >1\).
Proof
Let us first assume that z is a zero of N (note that \(P=MN\)). Since \([Q_0(z)] \vee [Q_1(z)]\) is just a point, we obtain \({Q_0}^*(z)Q_1(z)=H(z)M(z)=0\), where H is defined according to (18). The fact \(\gcd (M,N)=1\) then implies \(H(z)=0\). Following the proof of Theorem 7.3, a right jump of the s-factor is possible. If z is a zero of M, one can perform a left jump of the s-factor. In both cases one obtains \(\vert \mathrm {Fact}(Q)\vert >1\). \(\square \)
Theorem 7.6
Suppose \(Q \in {\mathbb {H}}_{*1}\) satisfies the assumptions of Theorem 7.3. All elements of \(\mathrm {Fact}(Q)\) can be obtained by repeated application of left and right jumps of the s-factor.
Proof
Given two different classes \([(F_{h_i,h,k_j})_{n,m}]\) and \([(F_{\hat{h}_i,\hat{h},\hat{k}_j})_{l,r}]\) of factorizations we proceed as follows. We define M and \(\hat{M}\) according to (16). For each complex zero \(z \in {\mathbb {C}}\) of the norm polynomial’s univariate factor \(P \in {\mathbb {R}}[t]\) we compute the multiplicities \({\text {mult}}(M,z)\) and \({\text {mult}}(\hat{M},z)\). If \({\text {mult}}(M,z)<{\text {mult}}(\hat{M},z)\), we follow the proof of Theorem 7.3 and successively perform right jumps of the s-factor of factorization \([(F_{h_i,h,k_j})_{n,m}]\) until the multiplicities coincide. Similarly, if \({\text {mult}}(\hat{M},z)<{\text {mult}}(M,z)\), we obtain equality of multiplicities by sequentially applying left jumps of the s-factor of factorization \([(F_{h_i,h,k_j})_{n,m}]\). We then obtain an equivalence class which is equal to \([(F_{\hat{h}_i,\hat{h},\hat{k}_j})_{l,r}]\) by Definition 4.1. \(\square \)
Example 7.7
Let us illustrate Theorem 7.6 at hand of the polynomial Q of Examples 6.7 and 7.2 . We have already computed the two non-equivalent factorizations
Moreover, we have
The first quadratic polynomial corresponds to a left factor and the second to a right factor in both factorizations, respectively. In order to make the two factorizations equal (or equivalent) by jumps of the s-factor, we should therefore consider the third quadratic polynomial.
The product of the two rightmost t-factors of the first factorization admits a second factorization:
The factors \(s-\mathbf {i}-\mathbf {j}\) and \(t+\mathbf {i}+\mathbf {j}-1\) commute so that
This is already equivalent to the second factorization since \((t - \mathbf {i}- 2)(t + \mathbf {i}+ \mathbf {j}- 1) = (t+\mathbf {j}+\mathbf {k}-1)(t-\mathbf {k}-2)\).
Remark 7.8
Suppose \(Q\in {\mathbb {H}}_{*1}\) satisfies the assumptions of Theorem 7.3. The number of possible jumps of the s-factor of a given factorization of Q can be counted with the help of the multiplicity cardinalities \(\#A\) and \(\#B\). One can perform
jumps of the s-factor. More precisely, \(\#A-2m\) left jumps and \(\#B-2n\) right jumps are possible, where m denotes the number of right factors and n denotes the number of left factors of the given factorization of Q. This immediately follows from the proof of Theorem 7.3.
Corollary 7.9
Suppose \(Q \in {\mathbb {H}}_{*1}\) satisfies the assumptions of Theorem 7.3. All elements of \(\mathrm {fact}(Q)\), that is, all possible factorizations of Q with monic univariate linear factors, can be found by performing the following three steps:
-
Step 1:
Compute a factorization of Q with monic univariate linear factors (Theorem 3.1, Corollary 3.2).
-
Step 2:
Perform all possible left/right jumps of the s-factor to obtain \(\#A+\#B-\deg P\) representatives of different equivalence classes of \(\mathrm {Fact}(Q)\). All representatives are of the form \(A(s-h)B\) with univariate polynomials \(A, B \in {\mathbb {H}}[t]\) and \(h \in {\mathbb {H}}\) (Theorem 7.6 and Remark 7.8).
-
Step 3:
Compute all possible factorizations of A and B with univariate linear factors (Theorem 2.1, Part (c)).
Proof
The statement is just a summary of the mentioned theorems and corollaries. \(\square \)
8 Applications in kinematics and future research
As mentioned in Sect. 1, one motivation for our study are applications in kinematics. This section explains the underlying ideas and demonstrates, why the factorization theory of bivariate quaternionic polynomials needs to be extended to polynomials of higher bi-degree in order to allow the construction of interesting mechanisms. For background information in the relation of quaternions to (spherical) kinematics we refer to Hegedüs et al. (2013).
A vector \((x_1,x_2,x_3) \in {\mathbb {R}}^3\) is identified with the vectorial quaternion \(x = x_1\mathbf {i}+ x_2\mathbf {j}+ x_3\mathbf {k}\). The quaternion \(q \in {\mathbb {H}} \setminus \{0\}\) acts on \({\mathbb {R}}^3\) via
The map (24) is a rotation around the vector \(q-{q}^*\) (or the identity if \(q - {q}^* = 0\)). The action (24) can be extended to quaternionic polynomials by replacing q with a quaternionic polynomial. Univariate polynomials then give one-parametric rational spherical motions, bivariate polynomials give two-parametric motions etc. For the sake of simplicity, we henceforth do not distinguish between motions and polynomials.
In this sense, the linear polynomial \(t - h \in {\mathbb {H}}[t]\) is a rotation around the fixed vector \(h-{h}^*\). This important observation relates our factorizations with linear univariate factors to mechanisms with revolute joints. A factorization \((F_{h_i,h,k_j})_{n,m}\) of \(Q \in {\mathbb {H}}_{*1}\) describes a mechanism consisting of \(n+1+m\) revolute joints, connected in sequential order, that can perform the motion Q. The mechanism’s movement when following the motion Q requires that the first n joints and the last m joints share the same motion parameter. In order to achieve this mechanically, that is, without individually controlling each joint parameter, it is necessary to further constrain the mechanism. In the univariate case this can be done by considering further factorizations, each yielding a new sub-mechanism or “leg” that can be added. In this way, we may think of the univariate t-factors \(T_l = (t-h_1)\cdots (t-h_n)\) to the left and \(T_r = (t-k_1)\cdots (t-k_m)\) to the right of the s-factor as “higher-order” joints with a single degree of freedom. The “mechanism” \(T_l(s-h)T_r\) corresponds to all factorizations in one class of equivalent factorizations and serves as one single leg.
The polynomial Q may admit non-equivalent factorizations but they cannot be used as additional legs because they do not further constrain the mechanism: The left and right jumps of Theorem 7.6 interchange commuting factors. These have linearly dependent vector parts and hence correspond to identical revolute joints. Therefore, the legs to non-equivalent factorizations are actually identical from a mechanism science viewpoint.
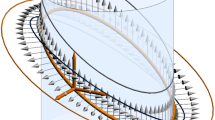
This is illustrated at hand of a simple example in Fig. 1. This figure refers to planar kinematics (all revolute axes are parallel) while our results pertain to spherical kinematics (all revolute axes are concurrent). The principle ideas and problems are the same but planar kinematics is easier and clearer to visualize. We consider a polynomial \(Q = T_l(s-h)(t-k)\) where \(\deg T_l = 2\). The top row illustrates our original hopes: The first image shows the mechanism to the equivalence class of the factorization \(T_l(s-h)(t-k)\), the second image shows the mechanism to the equivalence class obtained after a right jump of \(s-h\). This mechanism has the desired two degrees of freedom and could, in principle, be used as one leg. However, our results imply that \(s-h\) and \(t-k\) commute so that the true situation is that of the second row where the left and the right mechanisms are actually the same.

The construction of mechanisms from non-equivalent factorizations fails as the two mechanisms in the bottom row are identical
Failure of immediate kinematic applications should not prevent us from further investigation on factorizability of bi- and multivariate quaternionic polynomials. A natural question is factorizability of polynomials of arbitrary bi-degree which is addressed in Lercher and Schröcker (2022). That article also presents an example of a closed-loop mechanism of eight revolute joints with remarkable properties whose construction is based on two factorizations of a quaternionic polynomial of bi-degree (2, 2) and its extension to the algebra of dual quaternions (Hegedüs et al. 2013; Husty and Schröcker 2010; Gentili et al. 2021). Our investigations in this article provide necessary foundations for these extensions.
Notes
We call a factor \(t-h \in {\mathbb {H}}[t]\) a linear right factor of a univariate polynomial \(Q \in {\mathbb {H}}[t]\) if \(Q=S(t-h)\) for an appropriate \(S \in {\mathbb {H}}[t]\). Beware that this common denotation in the context of non-commutative rings will change its meaning in the context of star-one-polynomials (c. f. Sect. 5).
Our parametric equation (8) misses the curve \(Q_1(t)\) and the ruling spanned by the leading coefficients of \(Q_0\) and \(Q_1\). This defect could be overcome by either homogenizing the polynomial and using projective parameters or by properly defining evaluation at parameter values \(s = \infty \), \(t = \infty \). For the sake of simplicity of notation we refrain from doing this. This will not affect validity of our arguments.
References
Beauregard, R.A.: When is \(F[x, y]\) a unique factorization domain? Proc. Am. Math. Soc. 117(1), 67–70 (1993). https://doi.org/10.1090/S0002-9939-1993-1132407-8
Casas-Alvero, E.: Analytic Projective Geometry. European Mathematical Society, Zürich (2014)
Cheng, C.C.-A., Sakkalis, T.: On new types of rational rotation-minimizing frame space curves. J. Symb. Comput. 74, 400–407 (2016). https://doi.org/10.1016/j.jsc.2015.08.005
Gentili, G., Stoppato, C.: Zeros of regular functions and polynomials of a quaternionic variable. Michigan Math. J. 56, 655–667 (2008). https://doi.org/10.1307/mmj/1231770366
Gentili, G., Stoppato, C., Trinci, T.: Zeros of slice functions and polynomials over dual quaternions. Trans. Am. Math. Soc. 374, 5509–5544 (2021). https://doi.org/10.1090/tran/8346
Gordon, B., Motzkin, T.S.: On the zeros of polynomials over division rings. Trans. Am. Math. Soc. 116, 218–226 (1965)
Hegedüs, G., Schicho, J., Schröcker, H.-P.: Four-pose synthesis of angle-symmetric 6R linkages. ASME J. Mech. Robot. 7(4) (2015). https://doi.org/10.1115/1.4029186
Hegedüs, G., Schicho, J., Schröcker, H.-P.: Factorization of rational curves in the Study quadric and revolute linkages. Mech. Mach. Theory 69(1), 142–152 (2013). https://doi.org/10.1016/j.mechmachtheory.2013.05.010
Huang, L., So, W.: Quadratic formulas for quaternions. Appl. Math. Lett. 15(15), 533–540 (2002). https://doi.org/10.1016/S0893-9659(02)80003-9
Husty, M., Schröcker, H.-P.: Algebraic geometry and kinematics. In: Emiris, I.Z., Sottile, F., Theobald, T. (eds.) Nonlinear Computational Geometry. The IMA Volumes in Mathematics and its Applications, vol. 151, pp. 85–107. Springer, New York, Dordrecht, Heidelberg, London (2010). Chap. Algebraic Geometry and Kinematics. https://doi.org/10.1007/978-1-4419-0999-2_4
Lercher, J., Schröcker, H.-P.: A multiplication technique for the factorization of bivariate quaternionic polynomials. Adv. Appl. Clifford Algebras 32(1) (2022). https://doi.org/10.1007/s00006-021-01194-9
Li, Z., Scharler, D.F., Schröcker, H.-P.: Factorization results for left polynomials in some associative real algebras: State of the art, applications, and open questions. J. Comput. Appl. Math. 349, 508–522 (2019). https://doi.org/10.1016/j.cam.2018.09.045
Li, Z., Schicho, J., Schröcker, H.-P.: Factorization of motion polynomials. J. Symb. Comput. 92, 190–202 (2019). https://doi.org/10.1016/j.jsc.2018.02.005
Niven, I.: Equations in quaternions. Am. Math. Mon. 48(10), 654–661 (1941)
Pottmann, H., Wallner, J.: Computational Line Geometry. Mathematics and Visualization. Springer, Heidelberg (2010). 2nd printing
Siegele, J., Scharler, D.F., Schröcker, H.-P.: Rational motions with generic trajectories of low degree. Comput. Aided Geom. Design 76 (2020). https://doi.org/10.1016/j.cagd.2019.101793
Skopenkov, M., Krasauskas, R.: Surfaces containing two circles through each point. Math. Ann. 373, 1299–1327 (2019). https://doi.org/10.1007/s00208-018-1739-z
Acknowledgements
Daniel F. Scharler was supported by the Austrian Science Fund (FWF): P 31061 The Algebra of Motions in 3-Space. Johannes Siegele was supported by the Austrian Science Fund (FWF): P 30673 Extended Kinematic Mappings and Application to Motion Design.
Funding
Open access funding provided by University of Innsbruck and Medical University of Innsbruck.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of ineterst
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lercher, J., Scharler, D., Schröcker, HP. et al. Factorization of quaternionic polynomials of bi-degree (n,1). Beitr Algebra Geom 64, 209–232 (2023). https://doi.org/10.1007/s13366-022-00629-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13366-022-00629-z