
Abstract
The repeatable among-individual variation in behavior (animal personality) is considered to affect fitness. The variation in personality traits is shaped by complex evolutionary mechanisms involving energy allocation and resource acquisition. However, an association between personality and individual performance in energy gain in the natural environment still seems underexplored. The aim of our study was to test a hypothesis that consistent individual variation in behavior affects the energy acquisition of unpredictable food resources. We predicted that more explorative individuals would be finding ephemeral food resources with higher probability than those less explorative. The quasi-experiment with ‘random-walking-feeders’ was performed to assess the use of unpredictable food resources in the natural habitat occupied by free-ranging arboreal rodents — edible dormice Glis glis. A repeated open field test at laboratory conditions was conducted to assess whether male dormice show consistent among-individual variation in behavior. The open field test analysis indicated two main components of dormice behavior: exploration and boldness, from which only the first one was repeatable and thus considered as a component of animal personality. The probability of finding a feeder increased with exploration, independently of dormice age and body size. The results indicate that exploration can be considered an adaptive trait that improves energy acquisition. We suggest that the behavioral among-individual variation within populations persists due to the usage of distinct foraging strategies in the face of fluctuations in food resources availability.
Similar content being viewed by others

Introduction
The consistent among-individual differences in behavior are referred to as animal personality (Réale et al. 2007). Suites of correlated behaviors (behavioral syndromes) are categorized along a continuum from a reactive to a proactive personality type (Koolhaas et al. 1999; Sih et al. 2004). Proactive individuals are more aggressive, explorative and risk-taking while reactive individuals are less active and more timid. One of the main hypotheses explaining the maintenance of behavioral variation in the population — the ‘extended pace-of-life syndrome’ hypothesis (POLS) — assumes that personality is shaped by the evolutionary trade-off between current and future reproduction (Réale et al. 2010). As a result of energy allocation, proactive individuals are expected to prioritize current reproduction at the expense of survival, whereas reactive ones should invest in survival and future reproduction (Réale et al. 2010). However, recent meta-analyses did not support these predictions (Royauté et al. 2018; Moiron et al. 2020) and suggested that the plausible relationship between proactive behavior and resource acquisition may mitigate this evolutionary trade-off (Haave‐Audet et al. 2022). The behaviors which support reproduction were found to improve survival, suggesting that rather than only energy allocation, variation in behavior at the among-individual level can also reflect differences in resource acquisition (Haave‐Audet et al. 2022).
Since proactive behavior is energetically costly, individuals with different personalities should also be characterized by different energy expenditure and thus requirements (Careau et al. 2008; Mathot and Dingemanse 2015). Moreover, a review of existing studies found support for a ‘performance model’ (Mathot et al. 2019; at least in males: Strijker et al. 2023 and cited herein) which predicts a positive association between behavior and metabolism that improves the capacity to mobilize energy through its assimilation. Thus, extensive metabolic machinery is needed to promote and maintain higher expression of energetically costly behaviors (Careau et al. 2008; Biro and Stamps 2010). However, as a result, proactive animals (e.g., fast-exploring) must spend a significant amount of energy on self-maintenance and thus need to acquire more resources than reactive (e.g., slow-exploring) ones to maintain positive energy budgets. Thus, the itself costly actions of a proactive animal, as well as its increased obligatory metabolism, should be accompanied by more successful strategy of finding and utilizing resources that allow to survive in natural environment.
Besides predicted mechanisms rooted only in energetics, an association between behavior and resource acquisition may also occur because animals with different personality traits may perceive and thus explore their surroundings in substantially different ways (for example, see Brehm et al. 2019). The potential link between cognitive types and animal personality as well as repeatable differentiation in movement patterns between individuals might occur due to variation in perception, learning, memory and decision-making (Sih and Del Giudice 2012; Arvidsson and Matthysen 2016). The ‘information-gathering strategy’ (IGS) hypothesis predicts that although fast-exploring individuals explore the environment less precisely, they still can enter new unknown food patches more often than others (Arvidsson and Matthysen 2016). Slow-exploring individuals, on the other hand, explore close surroundings more precisely but forage rather in patches known by experience — therefore, they have a more precise ‘mental map’ of their smaller home ranges. This suggests that fast-exploring individuals should perform better in ephemeral food resource acquisition tasks than slow-exploring ones.
Animal personality is currently considered to be an important factor shaping the food web and as such have strong ecological consequences for the whole ecosystem functioning (Feldman et al. 2019; Zwolak and Sih 2020; Hunter et al. 2022). Thus, understanding how the among-individual variation in behavior affects the way animals utilize available resources seems crucial from wider ecological perspective. However, only a few studies aimed to directly link animal personality (e.g. exploration) with food resource acquisition in free-ranging animals (see for examples: Herborn et al. 2010; van Overveld and Matthysen 2010; Brehm et al. 2019; see also: Herborn et al. 2014). Moreover, most studies were conducted on bird models that fundamentally differ (in movement ability) from most mammals (excluding bats). The studies conducted on mammals investigated only the link between the boldness component of the personality of the individual and their behavioral patterns in risky situations (Dammhahn and Almeling 2012; Mella et al. 2015; Mazza et al. 2019). To the best of our knowledge, there is no study directly investigating the relationship between exploration and effectiveness of ephemeral food resource acquisition in free-ranging nonvolant vertebrate.
Herein, we use a quasi-experimental study designed to test a hypothesis that personality affects ephemeral food resource acquisition in a free-ranging tree-dwelling rodent — edible dormouse Glis glis. Dormice are a good animal model for verifying this hypothesis, since they are unlikely to hoard food (Morris and Hoodless 1992; followed by: Bieber and Ruf 2004), and thus, they need to explore the environment to gain food daily. We specifically predicted that the proactive personality of dormice is associated with an increased probability of finding ephemeral food resources. Moreover, virtually nothing is known about the influence of individual experience likely associated with age on the effectiveness of food resource acquisition (but see Herborn et al. 2014). The edible dormouse is a long-living species (up to 14 years in the wild: Trout et al. 2015); therefore, it can be used as a model organism to test whether age affects resource acquisition. We predicted that older (thus, more experienced and more familiar with the habitat) individuals would have higher chances of finding ephemeral food resources than younger ones, irrespectively of the personality they represent.
Materials and methods
Animals
The study was conducted in the Kozienice Forest (central Poland: 51°32′N, 21°28′E). Dormice were captured at ~ 12 ha nest-box plot located in a managed pine-dominated (Pinus sylvestris) forest. The nest-boxes were deployed in 2013 and at the beginning, there were 36 nest boxes forming an ~ 50 × ~ 50 m grid. In 2019, the plot was extended to a 64 nest-boxes grid. Since 2013, nest-boxes were checked at least three times a year (early summer, late summer, and early autumn) and all captured animals were sexed, aged, and marked individually with radio-frequency identification tags (RF-IDW-1, CBDZOE, Poland).
In 2020, male dormice were captured and transported to the laboratory of Forest Ecology Department in the Forest Research Institute in Sękocin Stary (~ 80 km apart). In the laboratory, the animals were kept in individual rodent cages (1290D, Tecniplast, Buguggiate, Italy) under controlled, ambient conditions (Ta = 20 ± 2 °C) and a natural photoperiod. Animals were provided with balanced food for rodents (Megan, Kraków, Poland), water and apples ad libitum. After 3–4 days, when all measurements were collected, animals were released at the place of capture. Since dormice, like many other hibernating species, are fattening at the end of the reproductive season, we decided that structural measures (head width; HW) would reflect their actual body size better than body mass (mb). The mb was used only to estimate body condition indices that are based on both structural and weight measures. We decided to conduct the study only on males to avoid the gestation of reproducing females influencing the results. In total, 48 animals were studied; 43 during the first session (in early summer) and 23 during the second session (in late summer). Overall, 18 individuals were studied repeatedly during both sessions. Since in the previous years we individually marked juveniles and yearlings, the age was known for most individuals. The animal age varied from two to at least seven years (four among five of the oldest animals were already adults when captured during the first year of the study).
All experimental procedures were approved by the Second Local Ethics Committee for Animal Experimentation in Warsaw, Poland (WAW2/121/2018), as well as under licence from the Polish Regional Directorate of Environmental Protection in Radom (decision: WSTR.6401.66.2018.MK.4).
Open-field test
To detect and measure behavioral traits, an open-field test (OFT) was performed. Each individual was tested in OFT after one night and one day spent in the animal room to reduce the stress associated with capture and transport. To minimize observer bias, blinded methods (animals were chosen randomly) were used when all behavioral data were recorded and when recordings of behavioral tests were analyzed. Each test was conducted during night-time (~ 1 h after sunset and no later than 1 h before sunrise). The arena (1 × 1 × 1 m) was self-constructed from white polyvinyl chloride plastic. It was placed in a dark room (3 × 3 × 3 m) and illuminated by four 5.5 W bulbs (470 lm; Lexman, Leroy Merlin Poland, Warsaw) painted red and mounted outside the arena above its corners at 2 m height. It resulted in an illuminance of 50 lx inside the central part of the arena. Before and after each OFT, the arena was cleaned with 70% ethanol and dried. During OFT, the animal was placed in the center of the arena using a plastic pipe 1 m tall and 15 cm in diameter. When the animal reached the floor of the arena, the pipe was removed and the recording was started. During OFT, the animals were recorded for 7 min with a digital camera (Hero 5, GoPro Inc., USA) mounted above the experimental set-up. During OFT sessions, observers left the behavioral room to avoid disturbances and tracked the recording with a smartphone using GoPro App (GoPro Inc., USA). We performed two sessions of OFT, the first in early summer (10th–27th June) and the second in late summer (21st August–23rd September).
Field experiment
We performed the ‘random-walking-feeders’ experiment which was developed to simulate the occurence of ephemeral food resources in the natural environment. With the usage of advanced automatic technology, specially adapted to long-term field work, we were able to record which individuals were more effective in finding resources without any human disturbance. The field experiment was conducted for 7 weeks between the 2nd of July and the 20th of August 2020. Ten feeders (0.4 × 0.4 × 0.2 m) constructed from metal mesh, wood and plexiglass (Supplementary information: Fig. S1) were mounted to trees ~ 4 m above ground. The automatic system reading individual tag IDs (Borowski et al. 2019) was installed in each feeder and registered the presence of individuals along with the date and time (Supplementary information: Fig. S2). All feeder locations (n = 70; 10 feeders × 7 weeks) were randomly assigned to the area of nest-box plot (+ 50 m buffer zone) in QGIS 3.12 (QGIS.org 2022) (Supplementary information: Fig. S3). At all times, there were 10 feeders available on the plot (at least 100 m apart from each other) and each week, they were moved to new locations. All readers were pretested to check whether they were able to collect tagged animal ID when passing through the gate before feeders were placed at given locations. Although readers used in the experiment were energy saving (Supplementary information: Fig. S2) and batteries would have lasted for more than a week, at each location, batteries were replaced with new ones to additionally support continuous work of equipment. Previous locations of feeders were never used again and new locations were also randomly chosen so that they were at least 50 m from any past location. Each feeder was baited with 5 apples and 50 hazelnuts. After each week, the feeders were cleaned with 70% ethanol. If needed, apples and hazelnuts were replaced with fresh ones only when a feeder was moved to a new location (only in one location during the whole experiment all apples were eaten).
Data processing
The number of times each behavior (grooming, jumping and rearing — standing on two legs) was exhibited during OFT was obtained manually by a single observer (MW). The latency to leave the central zone, time spent in different parts of the arena and total distance covered by an individual were calculated based on the data obtained automatically with a trained neural network using DeepLabCut software (Mathis et al. 2018). The central zone was defined as a 50 × 50 cm square in the middle of the arena, the corners as 25 × 25 cm squares and the edges near the walls as 25 × 50 cm rectangular areas. Since we placed dormice in the central zone at the beginning of each test, the relative time spent in different parts of the arena was calculated by excluding time spent in the center before its first departure.
Based on automatic records of tag IDs, we were able to detect activity in feeders and assign it to individual dormice without human presence. Since only a few dormice found more than a single feeder, we transformed this data to binomial values (1 — found at least one feeder during the whole study; 0 — did not find any feeder).
Statistical analysis
All statistical analyses were performed in R 4.1.2 (R Core Team 2020).
The principal component analysis (PCA) was performed using function ‘prcomp’ from ‘stats’ package to reduce the number of potentially correlated variables obtained during the open-field test into uncorrelated and significant components describing dormice behavior. The data included in PCA was initially tested with Bartlett’s as well as Kaiser-Mayer-Olkin tests from the ‘psych’ package. All variables were normalized prior to the analysis. To find which principal components (PCs) were significant, we compared the variance they explained with a random ‘broken stick’ model plot generated with ‘bstick’ function from ‘vegan’ package.
To explore variation in the significant PCs, linear mixed modeling procedures (LME) with restricted maximum likelihood were performed with ‘lme4’ package. Body size, condition and age were included as covariates (to account for plausible state-dependent variation in behavior) and animal ID as a random effect. Body condition (BC) was obtained as residuals from the linear relationship between mb and HW (Supplementary information: Fig. S4A). Since HW was correlated with age, to avoid multicollinearity in LMEs, we included its residuals (rHW was obtained from second order polynomial regression between HW and age: Supplementary information: Fig. S4B). Finally, an analysis of variance was performed for each LME based on the type II sum of squares using package ‘car’. Degrees of freedom for LMEs were estimated using the Kenward–Roger approximation.
The repeatability (τ) of HW, BC, and PCs was calculated using the function ‘rpt’ from ‘rptR’ package (Stoffel et al. 2017). Estimation of τ for morphological measures allowed us to understand its potential measurement error, changes in animal condition and/or the growth of animals during a study. By calculating the τ for PCs, we were able to distinguish state-dependent labile behaviors from the consistent variation that can be considered a component of animal personality. We calculated both unadjusted and adjusted τ’s for the components included in the LME models. 95% confidence intervals were estimated using parametric bootstrapping (1000 iterations). We estimated τ’s based on available data where 18 dormice were measured twice. However, we kept all the individuals in this analysis to improve the general fit of the dependent variable to explanatory variables during the modeling procedure. Statistical significance of estimated τ was tested using the likelihood ratio test.
Logistic regression was used to test whether the probability of finding a feeder was associated with age and repeatable traits as HW and PC1. Since variation in PC1 was affected by animal BC and rHW (see the “Results” section), thus, in the final analysis, we decided to use the best linear unbiased predictions (BLUP) calculated for PC1 from LME. We also calculated BLUP for HW from LME where quadratic relation with age was included. Male edible dormice may have relatively large home-ranges (from ~ 1 up to 7 ha; Ściński and Borowski 2008). However, this may also vary with the density of the population (high to low: ~ 0.5–2.5 ha: Jurczyszyn and Zgrabczyńska 2007). Average daily movements in male dormice may range from ~ 100 m (Cornils et al. 2017) up to 200–500 m, depending on high and low population density, respectively (Jurczyszyn and Zgrabczyńska 2007). Moreover, in our another study, we found that males equipped with radio-transmitters captured at the nest-boxes system were also exploring the natural shelters up to 200 m outside the plot (Iwińska et al. 2020). Since individuals captured at peripheral lines of the nest-box system were likely to spend more time outside the plot (in comparison to animals from the central part), they were expected a priori to have also lower chances to find a feeder placed on the study plot (see also the Supplementary information: Fig. S3). This indicates that the place of capture could affect at least 25–50% of individual chances to find any feeder at periphery lines — assuming realistic individual cores of the home ranges observed in male dormice (Jurczyszyn and Zgrabczyńska 2007; Cornils et al. 2017). We accounted for that by including place of capture in a logistic model (LM) to analyze all animals in a single procedure. We distinguished two categories: 0 — animals that were captured only in two peripheral lines and 1 — animals that were at least once captured in the central zone of the nest-box plot (16 central boxes). In the LM, probability to find a feeder was included as a dependent variable, BLUP-PC1, BLUP-HW, and age as covariates, and place of capture as a centered continuous predictor. In this modeling procedure, we also accounted for all plausible interactions between the place of capture and covariates.
The package ‘visreg’ was used to present the results obtained in the statistical modeling procedures. We assumed the significance of the P at the ≤ 0.05 level. Marginal statistical results of the P < 0.1 were accepted as insignificant trends.
Results
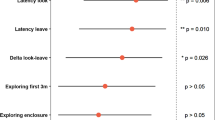
Our initial behavioral traits dataset met assumptions for PCA based on Bartlett’s and Kaiser–Meyer–Olkin’s tests. The first two PCs were found to significantly explain in total 66.3% of the variation in dormice behavior. The PC1 explained 41.5% of the total variation in dormice behavior during OFT. The rest of variation in behavior was significantly explained by PC2 (~ 24.8%). According to the correlation of behaviors with PCs (Table 1), the PC1 was interpreted as exploration and the PC2 as the boldness axis.
PC1 (exploration) and PC2 (boldness) were not correlated with age (PC1: ANOVA: F1,47 = 0.57, P = 0.456, PC2: ANOVA: F1,50 = 1.40, P = 0.242). PC1 (exploration) was positively correlated with rHW (β ± SE = 0.47 ± 0.18, ANOVA: F1,37 = 6.52, P = 0.015; Fig. 1a) and not significantly negatively correlated with BC (β ± SE = − 0.31 ± 0.16, ANOVA: F1,35 = 3.50, P = 0.070; Fig. 1b). PC2 (boldness) was affected neither by BC (ANOVA: F1,61 = 0.16, P = 0.683) nor rHW (ANOVA: F1,56 = 0.15, P = 0.708).

First principal component (PC1) indicating explorative behavior as a function of (a) residual head width (obtained from second order polynomial regression between head width and age) and (b) body condition as residual body mass obtained from ordinary last square regression between body mass and head width.
The individual variation in HW adjusted for age was consistent (τ = 0.52 [95% CI: 0.10–0.79], P = 0.007), but for BC, repeatability was not significantly higher than zero (τ = 0.00 [95% CI: 0.00–0.54], P = 0.500). The unadjusted PC1 (exploration) was repeatable (τ = 0.73 [95% CI: 0.46–0.87], P < 0.001) and that was also true when adjusted for rHW, BC, and age (τ = 0.78 [95% CI: 0.60–0.93], P < 0.001). That did not hold true for either unadjusted (τ = 0.09 [95% CI: 0.00–0.60], P = 0.349) or adjusted PC2 (boldness) (τ = 0.10 [95% CI: 0.00–0.64], P = 0.349).
The probability of finding a feeder was affected neither by age nor individual BLUP-HW (Table 2). We found a single significant interaction — the probability of finding a feeder increased with individual BLUP-PC1 (exploration) in the animals captured in the central zone of the nest-box plot (β ± SE = 1.93 ± 0.93, P = 0.037; Fig. 2) but not those from the periphery (β ± SE = − 0.79 ± 0.45, P = 0.077).

Model-based predicted probability of finding a feeder as a function of best linear unbiased predictions (BLUPs) for the first principal component (PC1) indicating explorative behavior adjusted for body size and condition (see the “Materials and methods” section for details)
Discussion
According to the pace-of-life syndrome (POLS) hypothesis, proactive animals would be those investing into reproduction, but with increased costs of survival (Réale et al. 2010). However, this assumption recently did not find support and an alternative hypothesis was formulated stating that resource acquisition associated with personality can mask this evolutionary trade-off rooted in energy allocation (Laskowski et al. 2021; Haave‐Audet et al. 2022). Therefore, if any trait raises the probability of finding ephemeral food resources, it can be considered adaptive. As information-gathering strategy (IGS) hypothesis indirectly suggests, the individuals who perform better in ephemeral food resource acquisition task should be the ones being more proactive and fast-exploring (Arvidsson and Matthysen 2016). In our experiment, conducted on free-ranging edible dormice, the probability of finding ephemeral food sources increased with the exploratory tendency of individuals measured under standardized laboratory conditions. Thus, the results support the statement that consistent among-individual differences in behavior, hence personality, is a key candidate to determine among-individual variation in resource acquisition (suggested in Laskowski et al. 2021; Haave‐Audet et al. 2022).
The number of jumps, rearings, and total distance covered correlated positively, whereas latency to move correlated negatively with PC1, indicating that this component clustered exploration (Table 1). The variation in exploration was marginally negatively correlated with BC (Fig. 1b), which is in line with the general tendency of animals in poor condition to exhibit higher levels of activity (Moran et al. 2021). We also found that bigger dormice were more explorative than smaller individuals (Fig. 1a). Nonetheless, when adjusted for the above, exploration was highly repeatable, indicating that this trait consistently differs between individuals. This is in agreement with other studies, as exploration was also found repeatable in many small mammals (Boon et al. 2007; Boyer et al. 2010; Montiglio et al. 2012; Dosmann and Mateo 2014; Schuster et al. 2017a, b; Schuster et al. 2017a, b; Rohrer and Ferkin 2020; Underhill et al. 2021; Wauters et al. 2021), birds (Dingemanse et al. 2002, 2012), and fishes (Mazue et al. 2015). Thus, it can be concluded that explorative behavior is an expression of personality trait in the studied population of dormice. Beyond explorative behavior, PCA distinguished the second significant axis (PC2), which was negatively related to grooming and time spent in corners (but positively with time spent near walls; Table 1) suggesting that it describes boldness. However, PC2 was not repeatable and thus, cannot be considered as a trait of animal personality but rather plasticity in behavioral response.
Neither dormice behavior nor its effectiveness in food acquisition was affected by the age of individuals — even though, intuitively, the effect of age could be significant in a species like dormouse, which can live up to 14 years in the wild (Trout et al. 2015), since individuals acquire experience and learn during their whole life. Moreover, the age was found to affect behavior in American red squirrel Tamiasciurus hudsonicus — individuals became less active during their ontogeny (Kelley et al. 2015). One explanation for this discrepancy is likely the fact that the authors compared juvenile and yearling stages while we compared adult animals of different age. The recent review indicates that even if differences in personality traits occur over maturation, they tend to be stable within later life stages (Cabrera et al. 2021). Only individuals that reached sexual maturity (> 2 years old Fietz et al. 2004) were included in this study, and this might be why exploration was not affected by age.
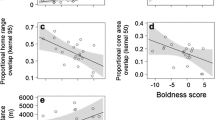
The results of the ‘random-walking-feeders’ experiment indicate that variation in the body size (adjusted for individual age) of dormice did not affect the probability of finding ephemeral food resources. For the animals captured in the central zone of the study plot, only the exploration (adjusted for individual age and body size) increased the probability of finding a feeder. Although several studies showed a positive relationship between proactive behaviors and food intake rates, most of them were conducted under laboratory conditions with food ad libitum or based on a correlation between the amount of accessible food in the environment and the personality traits of animals (reviewed in: Biro and Stamps 2008). Only a few examples of experimental bird studies linked exploration with the ability to find previously unknown resources in the wild. Fast-exploring great tits Parus major covered further distances in search of food than slow-exploring ones when challenged by sudden removal of food supply from known feeders (van Overveld and Matthysen 2010). Similarly, exploration in blue tits Cyanistes caeruleus was connected to their ability of discovering new feeding sites (Herborn et al. 2010). However, so far, there is no direct evidence of a link between exploration and ephemeral resource acquisition in non-volant terrestrial vertebrates. Despite that, a few studies documented relationships between personality and space use that might suggest it indirectly. There is a general tendency of proactive (bold and/or explorative) individuals of rodent species to travel more and possess larger home ranges or its core areas (Boon et al. 2008; Montiglio et al. 2012; Schirmer et al. 2019; Aliperti et al. 2021; Wauters et al. 2021). Moreover, the relationship between personality and use of different food resources was found in common brushtail possum Trichosurus vulpecula; proactivity was reflected in their diet composition and foraging strategies — more explorative individuals were more generalistic (Herath et al. 2021). Here, we present the first attempt to test the linkage between ephemeral resource acquisition and the exploration obtained in a quasi-experimental study on terrestrial vertebrate species. Our results suggest that more explorative dormice are also more effective in ephemeral food resource acquisition when free-ranging in the natural environment.
As the high level of exploration seems adaptive for individuals, it may be puzzling why among-individual variation in this trait still occurs in the population. Because resources are not evenly distributed across the habitat and they typically occur in patches (MacArthur and Pianka 1966), one can argue that in a heterogenous environment, high levels of proactiveness should always give the animal an advantage in finding resources (Wolf et al. 2007). This would happen likely by chance because of their elevated movement rates and larger home range areas (discussed above). This, however, does not explain why the less explorative behavioral types still persist in a population. The individual cognitive capacities postulated by IGS hypothesis as associated with animal personality (Sih and Del Giudice 2012) may state an explanation for behavioral variation in natural populations (Arvidsson and Matthysen 2016; Rojas-Ferrer et al. 2020). Firstly, the fast-exploring black-capped chickadees Poecile atricapillus showed attraction to novelty that was independent of locomotion rates (Rojas-Ferrer et al. 2020). Moreover, the slow-exploring great tits seemed to try to increase the foraging opportunity by checking already known food past sources, even when they were already empty (Arvidsson and Matthysen 2016). We suggest that the observed within-population variation in exploration is shaped by both spatial and temporal variation in food resources. This seems to be in agreement with simulations done by Spiegel and coauthors (2017), which implied that the slow-exploring animals could perform better than fast-explorers under patchy but predictable resources distribution. In turn, fast-explorers would perform better by finding new resource patches (Spiegel et al. 2017). We propose that these distinct strategies can coexist when temporal variation in food resources counteracts the process of microniche specialization and, as a result, maintains the population variability. For example, fast-exploring eastern chipmunks Tamias striatus reproduced earlier than slow-exploring ones, likely due to a higher success in resource acquisition. The slow-explorers in this species seemed to be more dependent on masting years and showed a higher reproductive success later in their lives (Montiglio et al. 2014). It is possible that a similar mechanism also occurs in edible dormouse and in years of food abundance, reactive individuals would have higher reproductive success, while in years of food scarcity, animals that are more effective in finding unpredictable food resources (more explorative ones) would benefit more.
As Laskowski et al. (2021) stated, finding out potential contexts in which the linkage between behavior and life-history trade-off is likely to exist should be a foundation needed to revise POLS hypothesis. In our study, we present such potential context and suggest that the interplay between different foraging strategies and personality under a temporally variable environment is crucial for further investigation. We hypothesize that while sedentary slow-explorers might indeed be more efficient in food acquisition ‘on a daily basis’ due to more thorough foraging in already known food patches, fast-explorers mitigate this difference with different foraging strategy, in which they search for unknown food patches and/or simply find new resources with higher efficiency. As a result, the fitness of slow-explorers would be more related to temporal variation of food abundance, while in fast-explorers, it would be rather independent of this phenomenon. Testing such plausible complex and context-dependent selection would allow us to better understand the variation in personality existing in natural populations and its role in adaptations under current global changes.
Data availability
All data supporting the findings of this study is available on github (https://github.com/mwirowska/glisfeeders).
Change history
09 November 2023
A Correction to this paper has been published: https://doi.org/10.1007/s13364-023-00722-1
References
Aliperti JR, Davis BE, Fangue NA, Todgham AE, Van Vuren DH (2021) Bridging animal personality with space use and resource use in a free-ranging population of an asocial ground squirrel. Anim Behav 180:291–306. https://doi.org/10.1016/j.anbehav.2021.07.019
Arvidsson LK, Matthysen E (2016) Individual differences in foraging decisions: information-gathering strategies or flexibility? Behav Ecol 27:1353–1361. https://doi.org/10.1093/beheco/arw054
Bieber C, Ruf T (2004) Seasonal timing of reproduction and hibernation in the edible dormouse (Glis glis). In: Barnes BM, Carey HV (ed) Life in the cold: evolution, mechanism, adaptation, and application:113–125
Biro PA, Stamps JA (2008) Are animal personality traits linked to life-history productivity? Trends Ecol Evol 23:361–368. https://doi.org/10.1016/j.tree.2008.04.003
Biro PA, Stamps JA (2010) Do consistent individual differences in metabolic rate promote consistent individual differences in behavior? Trends Ecol Evol 25:653–659. https://doi.org/10.1016/j.tree.2010.08.003
Boon AK, Réale D, Boutin S (2007) The interaction between personality, offspring fitness and food abundance in North American red squirrels. Ecol Lett 10:1094–1104. https://doi.org/10.1111/j.1461-0248.2007.01106.x
Boon AK, Réale D, Boutin S (2008) Personality, habitat use, and their consequences for survival in North American red squirrels Tamiasciurus hudsonicus. Oikos 117:1321–1328. https://doi.org/10.1111/j.0030-1299.2008.16567.x
Borowski Z, Zub K, Boratyński JS (2019) Automatic Transponder Readers – a new tool for studying activity and movement of small mammals. 8th European Congress of Mammalogy, ed. Borowski Z, 23–27 September, Warsaw, Poland:195
Boyer N, Réale D, Marmet J, Pisanu B, Chapuis J-L (2010) Personality, space use and tick load in an introduced population of Siberian chipmunks Tamias sibiricus. J Anim Ecol 79:538–547. https://doi.org/10.1111/j.1365-2656.2010.01659.x
Brehm AM, Mortelliti A, Maynard GA, Zydlewski J (2019) Land-use change and the ecological consequences of personality in small mammals. Ecol Lett 22:1387–1395. https://doi.org/10.1111/ele.13324
Cabrera D, Nilsson JR, Griffen BD (2021) The development of animal personality across ontogeny: a cross-species review. Anim Behav 173:137–144. https://doi.org/10.1016/j.anbehav.2021.01.003
Careau V, Thomas D, Humphries MM, Réale D (2008) Energy metabolism and animal personality. Oikos 117:641–653. https://doi.org/10.1111/j.0030-1299.2008.16513.x
Cornils JS, Hoelzl F, Rotter B, Bieber C, Ruf T (2017) Edible dormice (Glis glis) avoid areas with a high density of their preferred food plant - the European beech. Front Zool 14:2–10. https://doi.org/10.1186/s12983-017-0206-0
Dammhahn M, Almeling L (2012) Is risk taking during foraging a personality trait? A field test for cross-context consistency in boldness. Anim Behav 84:1131–1139. https://doi.org/10.1016/j.anbehav.2012.08.014
Dingemanse NJ, Both C, Drent PJ, van Oers K, van Noordwijk AJ (2002) Repeatability and heritability of exploratory behaviour in great tits from the wild. Anim Behav 64:929–938. https://doi.org/10.1006/anbe.2002.2006
Dingemanse NJ, Bouwman KM, van de Pol M, van Overveld T, Patrick SC, Matthysen E, Quinn JL (2012) Variation in personality and behavioural plasticity across four populations of the great tit Parus major: population variation in personality and behavioural plasticity. J Anim Ecol 81:116–126. https://doi.org/10.1111/j.1365-2656.2011.01877.x
Dosmann A, Mateo JM (2014) Food, sex and predators: animal personality persists with multidimensional plasticity across complex environments. Anim Behav 90:109–116. https://doi.org/10.1016/j.anbehav.2014.01.011
Feldman M, Ferrandiz-Rovira M, Espelta JM, Muñoz A (2019) Evidence of high individual variability in seed management by scatter-hoarding rodents: does ‘personality’matter? Anim Behav 150:167–174. https://doi.org/10.1016/j.anbehav.2019.02.009
Fietz J, Schlund W, Dausmann KH, Regelmann M, Heldmaier G (2004) Energetic constraints on sexual activity in the male edible dormouse (Glis glis). Oecologia 138:202–209. https://doi.org/10.1007/s00442-003-1423-0
Haave-Audet E, Besson AA, Nakagawa S, Mathot KJ (2022) Differences in resource acquisition, not allocation, mediate the relationship between behaviour and fitness: a systematic review and meta-analysis. Biol Rev 97:708–731. https://doi.org/10.1111/brv.12819
Herath APHM, Wat KKY, Banks PB, McArthur C (2021) Animal personality drives individual dietary specialisation across multiple dimensions in a mammalian herbivore. Funct Ecol 35:2253–2265. https://doi.org/10.1111/1365-2435.13893
Herborn KA, Macleod R, Miles WTS, Schofield ANB, Alexander L, Arnold KE (2010) Personality in captivity reflects personality in the wild. Anim Behav 79:835–843. https://doi.org/10.1016/j.anbehav.2009.12.026
Herborn KA, Heidinger BJ, Alexander L, Arnold KE (2014) Personality predicts behavioral flexibility in a fluctuating, natural environment. Behav Ecol 25:1374–1379. https://doi.org/10.1093/beheco/aru131
Hunter ML Jr, Boone SR, Brehm AM, Mortelliti A (2022) Modulation of ecosystem services by animal personalities. Front Ecol Environ 20:58–63. https://doi.org/10.1002/fee.2418
Iwińska K, Boratyński JS, Trivedi A, Borowski Z (2020) Daily roost utilization by edible dormouse in a managed pine-dominated forest. For Ecol Manag 468:118172. https://doi.org/10.1016/j.foreco.2020.118172
Jurczyszyn M, Zgrabczyńska E (2007) Influence of population density and reproduction on space use and spatial relations in the edible dormouse. Acta Theriol 52:181–188. https://doi.org/10.1007/BF03194213
Kelley AD, Humphries MM, McAdam AG, Boutin S (2015) Changes in wild red squirrel personality across ontogeny: activity and aggression regress towards the mean. Behav 152(10):1291–1306. https://doi.org/10.1163/1568539X-00003279
Koolhaas JM, Korte SM, De Boer SF, Van Der Vegt BJ, Van Reenen CG, Hopster H, De Jong IC, Ruis MAW, Blokhuis HJ (1999) Coping styles in animals: current status in behavior and stress-physiology. Neurosci Biobehav Rev 23:925–935. https://doi.org/10.1016/S0149-7634(99)00026-3
Laskowski KL, Moiron M, Niemelä PT (2021) Integrating behavior in life-history theory: allocation versus acquisition? Trends Ecol Evol 36:132–138. https://doi.org/10.1016/j.tree.2020.10.017
MacArthur RH, Pianka ER (1966) On optimal use of a patchy environment. Am Nat 100:603–609. https://doi.org/10.1086/282454
Mathis A, Mamidanna P, Cury KM, Abe T, Murthy VN, Mathis MW, Bethge M (2018) DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nat Neurosci 21:1281–1289. https://doi.org/10.1038/s41593-018-0209-y
Mathot KJ, Dingemanse NJ (2015) Energetics and behavior: unrequited needs and new directions. Trends Ecol Evol 30:199–206. https://doi.org/10.1016/j.tree.2015.01.010
Mathot KJ, Dingemanse NJ, Nakagawa S (2019) The covariance between metabolic rate and behaviour varies across behaviours and thermal types: meta-analytic insights. Biol Rev 94:1056–1074. https://doi.org/10.1111/brv.12491
Mazue GPF, Dechaume-Moncharmont F-X, Godin J-GJ (2015) Boldness-exploration behavioral syndrome: interfamily variability and repeatability of personality traits in the young of the convict cichlid (Amatitlania siquia). Behav Ecol 26:900–908. https://doi.org/10.1093/beheco/arv030
Mazza V, Jacob J, Dammhahn M, Zaccaroni M, Eccard JA (2019) Individual variation in cognitive style reflects foraging and anti-predator strategies in a small mammal. Sci Rep 9:10157. https://doi.org/10.1038/s41598-019-46582-1
Mella VSA, Ward AJW, Banks PB, McArthur C (2015) Personality affects the foraging response of a mammalian herbivore to the dual costs of food and fear. Oecologia 177:293–303. https://doi.org/10.1007/s00442-014-3110-8
Moiron M, Laskowski KL, Niemelä PT (2020) Individual differences in behaviour explain variation in survival: a meta-analysis. Ecol Lett 23:399–408. https://doi.org/10.1111/ele.13438
Montiglio P-O, Garant D, Pelletier F, Réale D (2012) Personality differences are related to long-term stress reactivity in a population of wild eastern chipmunks, Tamias striatus. Anim Behav 84:1071–1079. https://doi.org/10.1016/j.anbehav.2012.08.010
Montiglio P-O, Garant D, Bergeron P, Messier GD, Réale D (2014) Pulsed resources and the coupling between life-history strategies and exploration patterns in eastern chipmunks (Tamias striatus). J Anim Ecol 83:720–728. https://doi.org/10.1111/1365-2656.12174
Moran NP, Sánchez-Tójar A, Schielzeth H, Reinhold K (2021) Poor nutritional condition promotes high-risk behaviours: a systematic review and meta-analysis. Biol Rev 96:269–288. https://doi.org/10.1111/brv.12655
Morris PA, Hoodless A (1992) Movements and hibernaculum site in the fat dormouse (Glis glis). J Zool 228:685–687. https://doi.org/10.1111/j.1469-7998.1992.tb04468.x
QGIS.org. (2022) QGIS Geographic Information System. http://www.qgis.org
R Core Team (2020) R: a language and environment for statistical computing. Vienna, Austria: R Foundation for Statistical Computing. https://www.R-project.org
Réale D, Reader SM, Sol D, McDougall PT, Dingemanse NJ (2007) Integrating animal temperament within ecology and evolution. Biol Rev 82:291–318. https://doi.org/10.1111/j.1469-185X.2007.00010.x
Réale D, Garant D, Humphries MM, Bergeron P, Careau V, Montiglio P-O (2010) Personality and the emergence of the pace-of-life syndrome concept at the population level. Philos Trans R Soc B: Biol Sci 365:4051–4063. https://doi.org/10.1098/rstb.2010.0208
Rohrer KN, Ferkin MH (2020) Long-term repeatability and stability of three personality traits in meadow voles. Ethology 126:791–802. https://doi.org/10.1111/eth.13037
Rojas-Ferrer I, Thompson MJ, Morand-Ferron J (2020) Is exploration a metric for information gathering? Attraction to novelty and plasticity in black-capped chickadees. Ethology 126:383–392. https://doi.org/10.1111/eth.12982
Royauté R, Berdal MA, Garrison CR, Dochtermann NA (2018) Paceless life? A meta-analysis of the pace-of-life syndrome hypothesis. Beh Ecol Soc 72:1–10. https://doi.org/10.1007/s00265-018-2472-z
Schirmer A, Herde A, Eccard JA, Dammhahn M (2019) Individuals in space: personality-dependent space use, movement and microhabitat use facilitate individual spatial niche specialization. Oecologia 189:647–660. https://doi.org/10.1007/s00442-019-04365-5
Schuster AC, Carl T, Foerster K (2017) Repeatability and consistency of individual behaviour in juvenile and adult Eurasian harvest mice. Sci Nat 104:1–14. https://doi.org/10.1007/s00114-017-1430-3
Schuster AC, Zimmermann U, Hauer C, Foerster K (2017) A behavioural syndrome, but less evidence for a relationship with cognitive traits in a spatial orientation context. Front Zool 14:1–14. https://doi.org/10.1186/s12983-017-0204-2
Ściński M, Borowski Z (2008) Spatial organization of the fat dormouse (Glis glis) in an oak-hornbeam forest during the mating and post-mating season. Mamm Biol 73:119–127. https://doi.org/10.1016/j.mambio.2007.01.002
Sih A, Del Giudice M (2012) Linking behavioural syndromes and cognition: a behavioural ecology perspective. Philos Trans R Soc B: Biol Sci 367:2762–2772. https://doi.org/10.1098/rstb.2012.0216
Sih A, Bell AM, Johnson JC, Ziemba RE (2004) Behavioral syndromes: an integrative overview. Q Rev Biol 79:241–277. https://doi.org/10.1086/422893
Spiegel O, Leu ST, Bull CM, Sih A (2017) What’s your move? Movement as a link between personality and spatial dynamics in animal populations. Ecol Lett 20(1):3–18. https://doi.org/10.1111/ele.12708
Stoffel MA, Nakagawa S, Schielzeth H (2017) rptR: repeatability estimation and variance decomposition by generalized linear mixed-effects models. Methods Ecol Evol 8:1639–1644
Strijker BN, Iwińska K, van der Zalm B, Zub K, Boratyński JS (2023) Is personality and its association with energetics sex-specific in yellow-necked mice Apodemus flavicollis? Ecol Evol 13:1–11. https://doi.org/10.1002/ece3.10233
Trout RC, Brooks S, Morris P (2015) Nest box usage by old edible dormice (Glis glis) in breeding and non-breeding years. Folia Zool 64:320–324. https://doi.org/10.25225/fozo.v64.i4.a5.2015
Underhill V, Pandelis GG, Papuga J, Sabol AC, Rife A, Rubi T, Hoffman SMG, Dantzer B (2021) Personality and behavioral syndromes in two Peromyscus species: presence, lack of state dependence, and lack of association with home range size. Behav Ecol Sociobiol 75:9. https://doi.org/10.1007/s00265-020-02951-9
van Overveld T, Matthysen E (2010) Personality predicts spatial responses to food manipulations in free-ranging great tits (Parus major). Biol Lett 6:187–190. https://doi.org/10.1098/rsbl.2009.0764
Wauters LA, Mazzamuto MV, Santicchia F, Martinoli A, Preatoni DG, Lurz PWW, Bertolino S, Romeo C (2021) Personality traits, sex and food abundance shape space use in an arboreal mammal. Oecologia 196:65–76. https://doi.org/10.1007/s00442-021-04901-2
Wolf M, van Doorn GS, Leimar O, Weissing FJ (2007) Life-history trade-offs favour the evolution of animal personalities. Nature 447:581–584. https://doi.org/10.1038/nature05835
Zwolak R, Sih A (2020) Animal personalities and seed dispersal: a conceptual review. Funct Ecol 34:1294–1310. https://doi.org/10.1111/1365-2435.13583
Acknowledgements
We would like to thank Małgorzata Miksa for the help with fieldwork and Alicja Fells for providing language corrections. We also thank several anonymous reviewers whose constructive comments and suggestions assisted us to improve this and previous versions of the manuscript.
Funding
Financial support was provided by the Forest Research Institute (Grant No. 900–418 awarded to ZB).
Author information
Authors and Affiliations
Contributions
Wirowska Martyna: Data curation, Formal analysis, Investigation, Methodology, Visualization, Writing—original draft, Writing—review & editing.
Iwińska Karolina: Investigation, Writing—original draft, Writing—review & editing.
Borowski Zbigniew: Funding acquisition, Project administration, Resources, Writing—review & editing.
Brzeziński Marcin: Investigation, Supervision, Writing—review & editing.
Solecki Paweł: Investigation, Software.
Boratyński Jan Stanisław: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Project administration, Supervision, Validation, Writing—original draft, Writing—review & editing.
Corresponding authors
Ethics declarations
Ethics approval
All experimental procedures were approved by the Second Local Ethics Committee for Animal Experimentation in Warsaw, Poland (WAW2/121/2018), as well as under licence from the Polish Regional Directorate of Environmental Protection in Radom (decision: WSTR.6401.66.2018.MK.4).
Competing interests
The authors declare no competing interests.
Additional information
Communicated by: Magdalena Niedziałkowska
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wirowska, M., Iwińska, K., Borowski, Z. et al. Explorative behavior allows the successful finding of ephemeral food resources in the wild. Mamm Res 69, 89–98 (2024). https://doi.org/10.1007/s13364-023-00719-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13364-023-00719-w