
Abstract
Timber–concrete hybrid structural systems are a practical option to provide tall mass timber buildings with a lateral load-resisting system. This paper discusses the dynamic behavior of an 18-story timber–concrete hybrid building based on the vibration properties evaluated by on-site vibration tests. First, microtremor measurements and human-powered excitation tests were carried out and the obtained vibration data were analyzed using a stochastic subspace identification method to derive natural frequencies, damping ratios, and mode shapes. Then, a finite-element (FE) model was developed based on detailed structural design information, and its eigenvalues and eigenvectors were compared with the test results. The vibration test results showed various mode shapes, including in-plane deformation of the floor diaphragm composed of cross-laminated timber (CLT) panels. The damping ratios in all the modes were scattered between 1 and 3%, and no frequency dependency was observed. The modal properties of the FE model agreed well with the test results by considering the additional stiffness of non-structural components. In order to simulate the in-plane deformation of the CLT floor diaphragm, detailed modeling of the connection between each CLT floor panel and the connection between CLT floor panels and concrete cores is recommended. The findings provide practitioners with an insight into dynamic properties and FE modeling methods of tall timber–concrete hybrid buildings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Mass timber construction is becoming a widely accepted building alternative boosted by the need for a sustainable low-carbon society. Specifically in urban areas, constructing tall buildings utilizing mass timber products, such as glued laminated timber (GLT), laminated veneer lumber (LVL), and cross-laminated timber (CLT), is one of the preferred prefabricated options. In fact, several tall timber buildings have been constructed or are under construction in European and North American countries [1, 2], including countries located in well-known high seismic hazard zones.
For tall timber buildings, hybrid timber systems [3, 4] have become an efficient strategy to improve structural performance, especially against lateral loads caused by wind and earthquakes. For example, the 18-story residential building ‘Brock Commons’ [5] in Vancouver, Canada, and the 25-story residential building ‘Ascent’ [6] in Milwaukee, USA, have two concrete cores used as staircases and elevator shafts, which perform as vertical elements of the lateral load-resisting system (LLRS) of the buildings. The 12-story residential building’Tallwood 1’ [7] in Langford, Canada, has eccentrically-braced steel frames rising from the 2nd story to the top designed to resist lateral loads. There are many other examples of tall timber buildings adopting a hybrid structural system [8], and in most of these buildings, the concrete or steel members become elements of their LLRS, while the timber elements are used mostly in the design of the gravity load-resisting system and diaphragms. Tall timber hybrid buildings (TTHBs) will be more in demand in future mainly because of their technical feasibility and cost-effectiveness; however, the structural performance of completed TTHBs is not well investigated, and the information for the structural design is limited.
In the structural design of tall buildings, lateral vibration properties, such as natural frequencies, damping ratios, and mode shapes, including higher mode effects, are crucial information to obtain reliable estimates of their dynamic response to wind and seismic ground motions. In order to evaluate the vibration properties of tall timber buildings, several studies have been conducted based on the vibration tests on actual buildings by Reynolds et al. [9,10,11], Feldmann et al. [12], Aloisio et al. [13], Manthey et al. [14], Tulebekova et al. [15], and Larsson et al. [16]. The vibration data of tall timber buildings has been increasing by these researches; however, the data for TTHBs which have concrete or steel structures as LLRS is still limited; also, there is limited knowledge about the vibration properties in higher modes and the dynamic behavior of floor diaphragms.
The in-plane deformation of diaphragms should be carefully investigated, especially when the LLRS has concentrated shear forces transfer at specific locations, such as at the intersection of concrete cores with timber elements. CLT panels are the most common timber elements used for floor diaphragms in mass timber buildings, and their in-plane stiffness and connections play an important role in terms of their performance as diaphragms [17,18,19]. Omenzetter et al. [20] conducted ambient vibration tests on a three-story timber building with LVL floor diaphragms and pointed out that the floor diaphragm showed quite flexible behavior. This kind of study for TTHBs with CLT floor diaphragms is necessary for deepening the understanding of dynamic behavior and accounting for the influence of diaphragms on structural design.
The ambient vibration test (AVT), which is also called microtremor measurement, is the most general method for conducting vibration tests on an actual building, especially when the building is in service. The AVT is the convenient and sometimes the only option for the buildings in service; however, it is generally difficult to obtain larger amplitude vibration, which is essential to analyze the amplitude dependency of the vibration properties. To obtain a larger amplitude, a human-powered excitation test [21] is a feasible testing method since it only needs human mass and space for moving human bodies. Identified dynamic properties obtained via vibration tests are beneficial not only for structural design but also for structural health monitoring and improving the finite-element (FE) model of the building. Several studies on mid- and high-rise timber buildings have been conducted [13,14,15,16, 22,23,24,25], whereas the study on TTHBs is still limited.
This study aims to provide the dynamic properties of an 18-story TTHB through operational modal analyses, as well as guidance for the structural analysis and finite-element modeling of TTHBs. The paper is organized as follows. Section 2 describes the overview of the building and the on-site vibration tests. The same section explains the method for post-processing of the vibration data. Section 3 develops the FE model of the building. Section 4 shows the identified vibration properties by testing and the results of the modal analyses from the FE model. Section 5 discusses the vibration properties through comparison with the previous studies and the numerical simulation.
2 On-site vibration tests
2.1 Building description: mass timber–concrete hybrid structural system
The 18-story mass timber–concrete hybrid building is located within the University of British Columbia Vancouver campus, Canada, and is known as UBC Brock Commons Student Housing. The exact location of the building is 49° 16′ 10″ N, 123° 15′ 4″ W, and the elevation is about 80 m. At the time of its completed construction in 2017, it was the tallest hybrid timber building in the world [5]. Figure 1a shows the exterior view of the building, whereas Fig. 1b shows the digital model with its structural components. The building is 53 m in height, and its bearing members are mainly made of timber and concrete. Specifically, engineered wood products used include GLT, parallel strand lumber (PSL) and CLT. GLT and PSL columns and point-supported CLT floor panels are used in the structural gravity system, whereas the two reinforced concrete (RC) cores, which contain staircases and an elevator shaft, withstand lateral loads (e.g., wind and earthquakes). Each RC core has walls 450 mm in thickness and is anchored to the ground by a 1.5 m thick raft slab [26]. The columns in the first story and the slab of the second floor are also made of cast-in-place reinforced concrete to provide long-span spaces and to transfer axial force from the timber columns on the second story. As non-structural components, the building has prefabricated claddings for the envelope and Type X gypsum board walls for interior partitions. In this paper, the longitudinal and the transverse directions of the building are defined as X- and Y-directions, respectively.

The high-rise timber-concrete hybrid building: a exterior view; b 3D structural model
The standard cross section of timber columns is 265 mm × 265 mm in the lower stories and 265 mm × 215 mm in the upper stories. The CLT panels are 169 mm in thickness and are connected in-plane in order to develop a floor diaphragm behavior, transferring the lateral loads to the RC cores. Specifically, the CLT floor panels are connected to each other using Douglas fir plywood splines and two types of self-tapping screws and are covered by a 40 mm concrete topping to enhance fire and acoustic performance [26]. At the intersection with the RC cores, the CLT floor panels are supported vertically by steel angle ledgers and joined using steel drag straps to transfer of lateral loads to the RC cores [26].
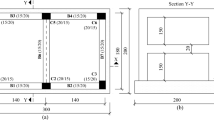
At the intersection with the CLT floor panels, the timber columns are connected using a custom-made cup-type steel joint, as illustrated in Fig. 2 [5]. Such connection consists of a 29 mm thick steel plate and a round HSS welded to the steel plate. The cross section of the round HSS for the top and the bottom end-side of the column are 127 mm × 13 mm and 89 mm × 6.4 mm, respectively, and the round HSS with a smaller section is inserted into the larger one, as shown in Fig. 2a. Between the timber columns and the concrete podium of the second floor, the steel connection is directly anchored to the concrete slab, as shown in Fig. 2b.

Connections at the end of the timber columns: a column-to-column joint; b column-to-slab joint (edited from [5])
2.2 Testing equipment: velocity sensors and A/D converters
To measure the microtremor of the building, eight servo velocity sensors type VSE-15D [27], which are produced by TOKYO SOKUSHIN CO LTD., were used in this testing program. The measurable frequency range of the sensor was from 0.2 to 70 Hz, and its resolution was 1 × 10−5 cm/s. Velocity sensors were placed at several predetermined locations in the building and connected by cables to the data acquisition systems, type SPC-52 [28] (TOKYO SOKUSHIN CO., LTD.), which consisted of a DC amplifier, a 24-bit A/D converter, and a laptop. The gain of the amplifier was set to 32 in order to retain the precision and not exceed the measurement range. The sampling rate was set at 200 Hz in all the measurements. Figure 3 shows the equipment, including the sensor setting at each location. The movements of residents in the common space on the 18th floor were recorded by a tablet-type computer during testing named Case 3, which is defined in the following section, in order to extract the data which were not disturbed by noise caused by the residents.

Equipment used in the testing program: a A/D converter and PC unit placed in the RC core; b the velocity sensor mounted on the rigid block on the 18th floor
2.3 Location of sensors and testing program overview
The on-site tests were conducted between March 27th and 29th, 2023. Since Brock Commons is in operation and there were no vacant apartments to be used during testing, all the velocity sensors were located on the floor of common spaces, such as staircases and corridors. The actual position of the velocity sensors is indicated by a red circle and red star in Fig. 4. Three test arrangements were set, named Case 1, Case 2, and Case 3. In Cases 1 and 2, the sensors were placed on the 1st, 2nd, 5th, 9th, 11th, 13th, 15th, and 18th floors in the west-side RC core and the east-side RC core, respectively, in order to measure the vibration of each RC core separately. All the sensors except the one on the 1st floor were aligned on the same vertical line. In Case 3, one sensor was set on the 1st floor, and the other seven sensors were located on the 18th floor to capture the torsional vibration of the building and the in-plane deformation behavior of the CLT floor. The positions of Sensor 8 in Case 1 and Case 2 were the same as those of Sensors 5 and 2 in Case 3, respectively. These sensor locations, indicated by red stars in Fig. 4, were used as the reference points when the mode shapes identified by three test cases were combined into one diagram. As shown in Fig. 3b, the sensor on the 18th floor was mounted on a rigid block to avoid an unstable setting due to the flexibility of the carpet on the floor. It is worth mentioning that the carpet layer is thin, and there is a 40 mm concrete topping just underneath the carpet. Assuming that the mechanical properties of the carpet mainly play a role in the vertical dynamic response of the floors, they are assumed to have a negligible impact on the measured lateral vibration characteristics of the structure. The A/D converter and PC unit were set on the 9th floor for Cases 1 and 2 and on the 18th floor for Case 3, respectively.

Location of velocity sensors, A/D converter and PC in each test cases
Tests were performed sequentially on March 27th, 28th and 29th, aiming at Case 1, Case 2, and Case 3 measurements, respectively. Table 1 summarizes the name and measurement direction of each test. In Cases 1 and 2, the vibration in the X- and the Y-direction were measured by changing the direction of the velocity sensor. In Case 3, in addition to the microtremor measurement, a human-powered excitation test was conducted to obtain free vibration of the building in the Y-direction. Figure 5a, b show two instances of the human-powered excitation tests, (i) the moving body method and (ii) the pushing wall method, implemented on the 18th floor. Eight students were engaged in these tests as they moved their bodies or pushed the wall in accordance with the fundamental natural frequency in the Y-direction, which was evaluated with the previous microtremor measurements. In all the test cases, the two elevators in the west-side core were turned off for ten minutes in order to avoid the noise generated by their moving and humans. The velocity data were recorded two hours per day, adopting the sampling rate of 200 Hz; hence, the total number of data collected by a test series was approximately four million points. In the post-processing data analysis explained in Sect. 2.4, the data acquired during the ten minutes off of the elevator were used to remove the influence caused by the noise. For full access to the dataset of this experimental program, including the raw data, refer to the work published in [44].

Human-powered excitation test conducted in Case 3_Y_free: a moving body method; b pushing wall method
During the testing period, the weather was partly cloudy. Temperature and wind speed recorded at Vancouver International Airport (YVR), which is about 10 km away from the building site, are summarized in Table 2. The average value of the temperature and the wind speed during the testing period were 12 °C and 6 m/s, respectively. The building site is also away from the main road and is closed to heavy traffic. Though a building was under construction at the next site of this building, the framework had almost completed, and heavy work was not conducted during the testing period.
2.4 Post-processing data analysis
In the analysis for extracting natural frequencies, damping ratios, and mode vectors using output-only data collected from the building, a stochastic subspace identification (SSI) method was used. The state-space model for a linear system with unknown inputs and measurement errors was described using the following formulas:
where \({\mathbf{x}}_{k} \in {\mathbb{R}}^{n}\) is the state vector of the system with the model order n, \({\mathbf{y}}_{k} \in {\mathbb{R}}^{n}\) is the output vector with the number of outputs l, and \({\mathbf{v}}_{k} \in {\mathbb{R}}^{n}\) and \({\mathbf{w}}_{k} \in {\mathbb{R}}^{n}\) are the process noise and measurement noise, respectively. A and C are the system matrices. Since small amplitudes were observed in these vibration tests, the state-space model for linear systems was applied in the data processing.
The algorithm proposed by Overschee and Moor [29] was used to identify the system matrices A and C. As the first step of this algorithm, the block Hankel matrices Yp and Yf consisting of output vector yk are constructed as follows:
where N = 60,000 is the number of data, and s is the number of block rows of the block Hankel matrix. The detailed procedure is omitted for brevity; QR decomposition and singular value decomposition are applied to the matrix composed of these matrices to estimate A and C. The natural frequency, damping ratio, and mode vector are calculated by the following equations which contain the eigenvalue p and the eigenvector ψ of A. Δt in Eq. 3a is a sampling time and was set to 0.005 s. MATLAB ver. R2022a [30] was used to execute a series of numerical calculations.
The model order n and the number of block rows of block Hankel matrix s highly affect the estimated results [42]; therefore, n and s were varied from 100 to 200 and from 150 to 200, respectively, then the result which satisfy the following criteria were determined as a stable mode.
where \({}_{q}f_{r}\), \({}_{q}h_{r}\), and \({}_{q}{\mathbf{\varphi }}_{r}\) are the natural frequency, damping ratio, and mode vector with \(n = r\) and \(s = q\), respectively. The last criterion evaluates a modal assurance criterion (MAC), where superscript (*) denotes complex conjugate transpose. The left side of Eqs. 4a–4c is commonly used as a criterion for seeking stable modes [43], while the right side of them was added to the criterion for ensuring the stability to the number of block rows of block Hankel matrix. The number of incremental values for n and s were set to 4 and 10, respectively, in consideration of the trend of the identified results and computational time. Figure 6 shows the flowchart of the process used in implementing criteria defined by Eqs. 4a–4c. Since the identified result of a stable mode still has a variation to some extent, the natural frequency and damping ratio of a stable mode were finally evaluated by averaging these identified stable results. The standard deviation, the coefficient of variation, and the 95% confidence interval of the natural frequency and damping ratio were also calculated using these identified results. When estimating damping ratios from free vibration obtained by human-powered excitation test, logarithmic decrement was used.

Implementation of the criteria for selecting stable modes
3 Finite-element model
The finite-element (FE) model of Brock Commons was built in SAP2000 [31]. Geometry and loading conditions were replicated based on detailed structural design information, including original shop and construction drawings. Timber and concrete columns were modeled with beam-type elements, while the floors and the walls of the RC core were modeled with shell-type elements. For the CLT floor members, a layered shell-type element was used in order to capture the different mechanical properties of each layer. A four-node thick-shell element based on Reissner–Mindlin’s plate theory was assigned to all shell-type elements. Isotropic material was used for concrete elements, whereas orthotropic material was applied to timber shell-type elements in order to consider the different mechanical properties in each direction. The maximum size of the mesh for shell-type elements was set to 0.5 m in view of the convergence and the computational time.
The boundary conditions at both RC column ends were considered as fixed-end restrained, whereas pinned-end restraints were assigned to both ends of the timber columns. Young’s modulus of concrete with compressive strength of 35 MPa was calculated by \(E = 4500\sqrt {35} = 26,620\) MPa in accordance with CSA A23 3-04 [32]. Young’s modulus E for GLT and PSL were set at 12,400 MPa and 15,100 MPa, respectively. The CLT floor panels have five layers consisting of two outer layers with \(E_{1} = 10,300\) MPa lumber and three inner layers with \(E_{1} = 9,500\) MPa lumber, where E1 represents the Young’s modulus in the wood grain direction (Fig. 7a, b). With reference to the Canadian CLT Handbook [33], the Young’s modulus in the perpendicular to the grain direction, E2 and E3, was assumed to \({{E_{1} } \mathord{\left/ {\vphantom {{E_{1} } {30}}} \right. \kern-0pt} {30}}\), and the shear modulus G12, G13, and G23 of the CLT were defined by \(G_{12} = G_{13} = {{E_{1} } \mathord{\left/ {\vphantom {{E_{1} } {16}}} \right. \kern-0pt} {16}}\) and \(G_{23} = {{G_{12} } \mathord{\left/ {\vphantom {{G_{12} } {10}}} \right. \kern-0pt} {10}}\), respectively. Table 3 lists the Young’s modulus and shear modulus of all the materials used in the model. The moment of all the edge of the layered shell model for CLT panels were released with consideration of the specification of the connection between two CLT panels [34]. The boundary between each CLT panel and that between the CLT panels and the RC cores were assumed to be fully connected. The concrete topping was added only as a dead load, and its stiffness was not included in the model since no composite action was assumed in the design of the CLT floors, and no connections were installed between the CLT panels and the concrete layer. The layout of CLT floor panels is illustrated in Fig. 7c. Figure 7d, e show the timber and the concrete part in the model, respectively.

Numerical model: a definition of local coordination of lamina; b layered shell element for CLT; c layout of CLT panels; d timber parts; e RC parts; f claddings; g partition walls
The claddings and the interior partition walls were modeled by link elements with linear springs which were installed diagonally in the structural frame, as shown in Fig. 7f, g. Since no experimental data were found on the lateral stiffness of these non-structural components and their definition starting from their specifications is unpractical, the stiffness of the link elements, kc for the cladding and kp for the partition wall, were varied from 0 to 13 kN/mm by 1 kN/mm and sought the values which minimize the error defined by the following (Eq. 5):
where \(f_{{i,\,{\text{num}}}}\) and \(f_{{i,\,{\text{exp}}}}\) are the numerical and the experimental natural frequencies of ith mode.
Dead loads and live loads listed in Table 4 were applied to floors and the roof. The values of the dead loads were the same as those used for the structural design of this building, while the live loads were estimated based on the architectural layout and the condition during the testing period.
4 Results
4.1 Experimental results
Figure 8 shows an example of a stabilization diagram obtained by the SSI. The x-, y-, and z-axes indicate frequency, the model order n, and the number of block rows of block Hankel matrix s, respectively. Each circle indicates the identified result, and the area of the circle is proportional to the magnitude of the damping ratio. When circles of similar size line up on almost the same frequency, the mode with the frequency is expected to be one of the stable modes of the building. The circles filled in red are the identified results which satisfy the criteria defined by Eqs. 4a, b, and c. For example, in Fig. 8, it is shown that the two stable modes are around 1 Hz, and also there are some stable modes between 3 and 10 Hz, as indicated by red squares.

An example of stabilization diagram
With specific reference to Cases 1 and 2, Fig. 9 shows results in the X-direction. In Fig. 9a, the lower graph is the Fourier amplitude of velocity data recorded by each sensor, and the identified results which satisfy the criteria are plotted in the upper graph in red circles. The mode shapes indicated by the three modes X1, X2, and X3 are shown in Fig. 9b, which are illustrated by rotating the complex vector every π/8 rad. The blue circle in Fig. 9b indicates the location of the sensors.

Test results in the X-direction: a Fourier amplitude and identified frequencies and damping ratios; b mode shapes
The Fourier amplitude and the identified results of Case 1, Case 2, and Case 3 referring to the Y-direction are presented in Fig. 10 in the same manner as in Fig. 9 for the X-direction. Ten stable modes selected from the results of Case 3, which are indicated by Y1, Y2, …, Y10, and their mode shapes are summarized in Fig. 10b. In order to capture the vibration behavior of the whole building in the Y-direction, the mode shapes evaluated by Case 1, Case 2, and Case 3 are combined in one graph, as shown in Fig. 11. As mentioned in Sect. 2.3, the measured points where Sensors 5 and 2 were located in Case 3 were used as the reference points. The combined mode shapes are created for the first four modes, where both Case 1 and Case 2 also have stable modes corresponding to Case 3. Note that the mode vectors of Case 1 and Case 2 are normalized to have the same vector as those of Case 3 on the 18th floor. Although seasonal changes in environmental conditions could change the vibration property of timber buildings [41], these three test cases were conducted on three consecutive days, and the difference in average temperature and wind speed were just 5 °C and 2 m/s, respectively, as shown in Table 2. In addition, the Fourier amplitudes of the reference sensors have close values as shown in Fig. 12; therefore, the mode shapes identified by the three test cases were combined without any correction for environmental conditions.

Test results in the Y-direction: a Fourier amplitude and identified frequencies and damping ratios; b mode shapes

Mode shapes of the whole building in the Y-direction

Fourier amplitude of the reference sensors
The natural frequencies and the damping ratios identified by the SSI are summarized in Table 5 and Fig. 13. Figure 13a shows the relation between the natural frequency and the damping ratio. The linear regression and its coefficient of determination R2 are also shown in the figure. The coefficient of variation of the natural frequency and the damping ratio, which were calculated using the results identified as stable modes, are presented in Fig. 13b, c, respectively. The standard deviation and the 95% confidence interval of each identified result are also listed in Table 5.

Frequency dependency of damping ratios and the variation of identified results: a relation between the natural frequency and the damping ratio; b coefficient of variation of the natural frequency; c coefficient of variation of the damping ratio
In Fig. 14, the free vibrations at three locations obtained by human-powered excitation tests with the pushing wall method are plotted. Since the maximum amplitude recorded by the moving mass method was small and the free vibration was not observed clearly, only the result of the pushing wall method was analyzed here. The pushing was continued over 10 s to amplify the vibration, then interrupted upon starting the acquisition of the free vibration. The damping ratios were evaluated by analyzing the data indicated by red lines.

Free vibration obtained by the human-powered excitation test in Case 3_Y_free
4.2 Numerical results
Eigenvalue analysis was conducted to evaluate natural frequencies and mode shapes. Figure 15 shows the relation between the stiffness of the link element for the non-structural components and the natural frequencies of the translational mode in the X- and Y-direction, and the torsional mode. The translational mode in the X and Y direction and the torsional mode correspond to the 1st (or 2nd), 2nd (or 1st), and 3rd modes, respectively. The vertical axis shows the ratio of the numerical result to the experimental result. In Fig. 16, the mode shapes and the natural frequencies of the 1st, 2nd, 3rd, 4th, 8th, 10th, 13th, and 23rd modes and their modal participating mass ratios with regard to the X- and Y-directions (UX and UY) and the rotational direction around the Z-axis (Rz) are summarized. The 13th and 23rd modes were evaluated to investigate the in-plane deformation of the CLT floor diaphragm. Note that the stiffness of the claddings and the partition walls of the FE model, kc and kp, was set to 7 kN/mm and 12 kN/mm, respectively, which gives the minimum value of ferr defined by Eq. 5.

Influence of the stiffness of the non-structural components on the natural frequencies: a translational mode in the X-direction (1st or 2nd mode); b translational mode in the Y-direction (2nd or 1st mode); c torsional mode (3rd mode)

Mode shapes, natural frequencies, and modal participating mass ratios of the FE model
Table 6 shows the relation between the numerical and the experimental mode. Values in the table indicate the ratio of the numerical natural frequency to the experimental ones. The comparison of the numerical and experimental mode shapes is presented in Fig. 17. The mode vector of the numerical results at the point where the velocity sensor was located in the test is extracted from the results shown in Fig. 16. The percentage figure listed at the top left of each figure is a modal assurance criterion (MAC) calculated by the following (Eq. 6):
where \({\mathbf{\varphi }}_{{{\text{num}}}}\) and \({\mathbf{\varphi }}_{\exp }\) are the numerical and the experimental mode vectors, respectively.

Comparison of numerical and experimental mode shapes: a X-direction; b Y-direction; c Y-direction (18th floor)
5 Discussion
5.1 X-directional vibration properties
In the Fourier amplitude plots of Case 1 (measurement in the west-side core) and Case 2 (measurement in the east-side core) of Fig. 9a, two peaks are shown close to 1 Hz and one peak close to 4 Hz frequencies. The identified result by the SSI also concentrates on these frequencies; therefore, these modes are considered to be the stable modes in the X-direction. The mode shapes of the 1st and the 2nd modes are similar and have no nodes, which is the point of zero displacements, as illustrated in Fig. 9b, while the 3rd mode has a node around the 15th floor. As mentioned in Sect. 5.2, since the mode with the frequency of 1.16 Hz is also identified in the Y-direction and its mode shape shows torsional behavior around the Z-axis, this mode is one of the torsional modes of the building and the vibration has both X- and Y-directional components. The damping ratio is in the range of 1–2% in all the identified modes.
For the estimation of the fundamental period of RC buildings which have shear walls as the lateral load-resisting system, Fritz et al. [35] proposed the formula expressed by Eq. 7 based on thousands of vibration test data. In the National Building Code of Canada (NBC) 2020 [36], Eq. 8 is used to estimate a fundamental period for buildings with shear walls. Architectural Institute of Japan (AIJ) derived the regression formula expressed by Eq. 9 for RC buildings based on the database consisting of Japanese buildings [21, 37].
where N is the number of stories and H is the height (m) of the building. When 18 and 53 are assigned to N and H, respectively, \(f_{{{\text{Fritz}}}} = {1 \mathord{\left/ {\vphantom {1 {T_{{{\text{Fritz}}}} }}} \right. \kern-0pt} {T_{{{\text{Fritz}}}} }} = 0.99\) Hz, \(f_{{{\text{NBC}}}} = {1 \mathord{\left/ {\vphantom {1 {T_{{{\text{NBC}}}} }}} \right. \kern-0pt} {T_{{{\text{NBC}}}} }} = 1.02\) Hz, and \(f_{{{\text{AIJ}}}} = {1 \mathord{\left/ {\vphantom {1 {T_{{{\text{AIJ}}}} }}} \right. \kern-0pt} {T_{{{\text{AIJ}}}} }} = 1.10\) Hz are obtained. Although the difference among these three estimations is small, Eq. 7 gives the best approximation to the test building and the value is 6% larger than the identified value. One possible reason for this difference is the contribution of the gravity load-resisting system. The gravity structure system of RC buildings is also made of RC members with rigid joints and it is assumed to possess lateral stiffness to a certain extent, while Brock Commons withstands gravity loads by pin-connected timber columns and no additional lateral stiffness is expected.
Fritz et al. [35] and AIJ [21, 37] provided an estimation formula for the damping ratio of RC buildings. The estimation formula by Fritz et al. and AIJ are shown in Eqs. 10 and 11, respectively. In general, damping ratios are highly affected by the amplitude of vibration and basically increase with an increase of the vibration amplitude [38,39,40]; accordingly, AIJ derives the estimation formula of Eq. 12 for the values obtained from the microtremor excitation.
For the UBC Brock Commons, the estimated damping ratios are \(h_{{{\text{Fritz}}}} = 3.3\%\), \(h_{{{\text{AIJ}}}} = 2.4\%\), and \(h_{{{\text{AIJ\_micro}}}} = 2.1\%\), respectively. The value of \(h_{{{\text{AIJ\_micro}}}}\) is the most conservative and the closest to the test results; however, it is still two times larger than the tested building. In general, heavy buildings tend to be subjected to the influence of a soil-structure interaction and the damping ratio becomes larger due to radiation damping. The weight of the tested hybrid building must be lighter than RC buildings, which is supposed to be one of the reasons that the damping ratio of Brock Commons has been shown to be lower than that of RC buildings.
5.2 Y-directional vibration properties
In the Fourier amplitude plots of Fig. 10a, there are many peaks and stable identified results between 0.9 and 8 Hz. Especially in Case 3 (measurement on the 18th floor), this trend is conspicuous. The mode shapes in Case 3 can be classified into two groups according to the in-plane deformation of the floor. Moving from the 1st to the 5th modes, most measured points are on the same line, which means the floor behaves as a rigid diaphragm. In the 6th to 10th modes, on the other hand, the mode shape exhibits a curved line, which indicates the diaphragm shows flexibility due to the in-plane deformation of its subcomponents and connections. It is also confirmed that the displacement of the RC core is smaller than that of the CLT floor in the 7th to 10th modes, where the in-plane deformation of the floor is dominant. As mentioned above, the CLT floor behaves as a rigid plate in the 1st and 2nd modes; however, different movement is observed at the east end, where Sensor 2 was located. Although a more detailed investigation is needed to reveal this phenomenon, one possible explanation is that deformation at the connection between the RC core and the CLT panel is developed.
From the three-dimensional vibration behavior of the building shown in Fig. 11, the 1st and 4th modes are translational 1st and 2nd modes, while the 2nd and 3rd modes are torsional 1st and 2nd modes. In the 3rd and 4th modes, the node is close to the 15th floor as is the case with the X-directional 3rd mode.
The damping ratios are distributed from 1.1 to 2.8%, which is close to the results of the X-direction, as summarized in Table 5. As for natural frequencies, the fundamental frequency is almost the same as that of the X-direction. Hence, the discussion about the estimation formula conducted in Sect. 5.1 has the same meaning also in the Y-direction.
5.3 Frequency and amplitude dependencies of damping ratios
From Fig. 13a, the relation between the natural frequencies and the damping ratios shows a weak positive correlation; however, the coefficient of determination \(R^{2} = 0.337\) is small and, in addition, the coefficient of variation of the damping ratio is large compared to that of the natural frequency if comparing Fig. 13b with c. Hence, it is reasonable to understand that the damping ratio is almost the same regardless of the natural frequency.
In the human-powered excitation test, about five times larger amplitude was obtained by pushing walls in accordance with the natural frequency, as shown in Fig. 14. The amplitude and the phase of the free vibrations at three locations measured by Sensors 2, 4 and 5 are similar, indicating that this free vibration is the translational mode. The damping ratio evaluated by logarithmic decrement is not so different from the results evaluated from microtremor measurements, showing that amplitude dependency is negligible within the range of amplitude obtained by this test.
5.4 Comparison with other tall timber buildings
In this section, the vibration properties of Brock Commons are compared with those of other tall timber buildings. In order to investigate vibration properties of higher modes, the buildings whose natural frequencies and damping ratios up to at least 3rd mode were identified are selected from the published works [9, 13, 15]. Table 7 lists the features of the selected three buildings in terms of height, number of stories, type of load-resisting systems and the number of identified modes.
Figure 18a presents the relation between the height of the building and the natural frequency in the fundamental mode. It can be observed that the natural frequency decreases with the increase of the building height, which is in accordance with the results exhibited by Reynolds et al. [11] and Feldmann et al. [12]. Figure 18b shows the relation between the building height and the damping ratio in the fundamental mode. As also Reynolds et al. [11] pointed out, there is not so clear a tendency as for the case of frequencies. In Fig. 18c, the relation between the natural frequency and the damping ratio of the four buildings is plotted. For Brock Commons, only the results of Case 1_X and Case 3_Y are shown in this figure. It is shown that the damping ratio of all the buildings is scattered between 1 and 3%, and there is no clear correlation between the natural frequency and the damping ratio. This result indicates that stiffness-proportional damping overestimates the damping ratio in higher modes; hence, particular attention must be paid when defining the damping matrix of dynamic numerical models.

Comparison with different timber buildings: a relation between the height of the building and the frequency in the fundamental mode; b relation between the height of the building and the damping ratio in the fundamental mode; c relation between the natural frequency and the damping ratio
5.5 Comparison with FE model
As shown in Fig. 15, the FE model without the non-structural components (i.e., \(k_{{\text{c}}} = k_{{\text{p}}} = 0\)) yields an underestimation of the natural frequencies of the building. Conversely, by accounting for the stiffness kc and kp, the natural frequencies increase and the FE model’s results become closer to the experimental data. It is also shown that the influence of the non-structural components is remarkable for the translational mode in the X-direction. This is due to the narrow shape-type floor plan of the building, having long cladding in the X-direction; precisely, three times longer than in the Y-direction. From Fig. 15c, the claddings have more influence than the partition walls in increasing the frequency of the torsional modes. The value calculated by Eq. 5 takes its minimum when \(k_{{\text{c}}} = 7\) kN/mm and \(k_{{\text{p}}} = 12\) kN/mm, indicating that partition walls have larger stiffness than their counterparts. Note that the magnitude of stiffness is of low amplitude; hence, friction force at connections between the non-structural wall and the structural frame should significantly affect the lateral stiffness.
According to the modal participating mass ratio and mode shapes illustrated in Fig. 16 and test results shown in Figs. 9, 10 and 11, the numerical 1st (N1) and 2nd (N2) modes correspond to the X-directional 1st mode (X1) and Y-directional 1st mode (Y1), respectively. The numerical 3rd mode (N3) is the torsional 1st mode, which relates to the X- and Y-directional 2nd modes (X2 and Y2). In the numerical 4th mode (N4), both the X-directional and the torsional components exist and they are equivalent to the X-directional 3rd mode (X3) and the Y-directional 3rd mode (Y3), respectively. The numerical 8th mode (N8) is equivalent to the Y-directional 4th mode (Y4). The torsional 2nd mode is seen in the numerical 10th mode, which should correspond to the Y-directional 5th mode (Y5). The numerical 13th and 23rd modes (N13 and N23) show the in-plane deformation of the 18th floor, which is similar to the Y-directional 7th and 8th (Y7 and Y8) modes. As mentioned above, the numerical 10th mode (N10) is assumed to correspond to the Y-directional 5th mode (Y5); however, this mode is not focused on here because the stable mode was not obtained in the test of Case 1_Y, and the whole behavior of the building is not clear.
As indicated by the ratio of the numerical natural frequency to the experimental natural frequency in Table 6, the numerical and experimental values are in good agreement. With regard to mode shapes illustrated in Fig. 17, the numerical and experimental results also agree well and the MAC values are over 90% in all the modes. According to these results, it is found that the developed FE model provides a reasonable approximation to the actual building in terms of vibration properties. However, the in-plane deformation of the 18th floor observed in the Y-directional 6th, 9th, and 10th modes (Y6, Y9, and Y10) and the different movement between the east-core (Sensor 2) and the CLT floor (Sensor 3) seen in the Y-directional 1st and 2nd modes (Y1 and Y2) were not confirmed in the numerical simulation. Such flexibility of the diaphragm and the local deformation are assumed to be caused by the deformation of the connections between CLT panels and between the CLT panels and the RC cores. Although the required precision of the FE model depends on the type of analyses, detailed modeling of the connections is strongly suggested to capture the whole in-plane deflection of the CLT diaphragms.
In this study, the natural frequency of the FE model was tailored to the actual recorded one by considering the stiffness of the non-structural components while keeping material properties as fixed parameters. Particularly, Young’s modulus of concrete was not varied in the analyses. During the initial calibration of the FE model, some studies were performed to study the influence of the material properties, such as the elastic properties of concrete used in the cores. For instance, in the event that Young’s modulus of concrete is set 1.68 times its design value, the natural frequency in the X-directional 1st mode (N1) becomes 0.93 Hz, matching that extracted from the experimental results. However, the corresponding natural frequency in the Y-directional 1st mode (N2) and the torsional 1st mode (N3) become 1.16 Hz and 1.38 Hz, respectively, with these values far from those obtained experimentally. These results suggest that it is not viable to match the natural frequencies of multiple modes by only tuning Young’s modulus of concrete. Thus, confirming that adding non-structural components is a reasonable method of modeling the lateral response of the building.
6 Conclusions
This research investigated the vibration properties of an 18-story timber–concrete hybrid building through on-site vibration tests and operational modal analyses. The identified vibration properties were compared with RC and other tall timber buildings. Modal properties obtained from a finite-element analysis were compared with the experimental results. Based on the experimental and numerical studies, the following conclusions can be drawn:
-
The natural frequency and the damping ratio in the fundamental mode were about 0.93 Hz and 1%, respectively. Comparing these values with those of an RC building with comparable height, the natural frequency is 6% smaller, and the damping ratio is about half. The nature of the difference is assumed to be the influence of the gravity load-resisting system and the soil–structure interaction.
-
The damping ratio of all the modes identified in the test was scattered between 1 and 3%, and there was no clear correlation between the frequency and the damping ratio. This tendency is also confirmed in other tall timber building studies, indicating that stiffness-proportional damping overestimates the damping ratios in higher modes. The amplitude dependency of the damping ratio was not observed within the amplitude range obtained in this test.
-
Many stable modes were identified in the transverse direction, and their mode shapes showed complex behavior caused by the torsional vibration and the in-plane deformation of the CLT floor diaphragm. The flexibility of the CLT diaphragm is an important feature in understanding the vibration characteristics of hybrid buildings.
-
The FE model developed in this study simulated the natural period and the mode shapes of the actual building with good accuracy by considering the lateral stiffness of the claddings and the partition walls. On the other hand, in-plane deformation of the CLT floor diaphragm in higher modes was not confirmed in the FE model. In order to enhance the FE model accuracy, it is recommended that the detailed modeling of the panel-to-panel connections and the connection between the RC core and the CLT panel are included.
Data availability
The authors declare that the data supporting the findings of this study are available within the paper and the Mendeley Data (https://doi.org/10.17632/rt7w3txv2z.1).
References
Kaufmann H, Krötsch S, Winter S (2022) Manual of multi-storey timber construction: principles—constructions—examples. Detail, Munich
Karacabeyli E, Lum C (2022) Technical guide for the design and construction of tall wood buildings in Canada. FPInnovations, Canada
Foster RM, Reynolds TPS, Michael HR (2016) Proposal for defining a tall timber building. J Struct Eng 142(12):02516001. https://doi.org/10.1061/(ASCE)ST.1943-541X.0001615
Pastori S, Mazzucchelli ES, Wallhagen M (2022) Hybrid timber-based structures: a state of the art review. Constr Build Mater 359:129505. https://doi.org/10.1016/j.conbuildmat.2022.129505
naturally:wood (2016) Tallwood House Storyboards. https://www.naturallywood.com/wp-content/uploads/brock-commons-storyboards_factsheet_naturallywood.pdf. Accessed 25 May 2023
WoodWorks. https://www.woodworks.org/award-gallery/ascent/. Accessed 25 May 2023
District 56 Tallwood 1. https://aspectengineers.com/portfolio/tallwood/. Accessed 25 May 2023
Green MG, Taggart J (2020) Tall wood buildings: design, construction and performance. Birkhäuser, Basel
Reynolds T, Bolmsvik Å, Vessby J, Chang W S, Harris R, Bawcombe J, Bregulla J (2014) Ambient vibration testing and modal analysis of multi-storey cross-laminated timber buildings. WCTE2014 ABS088
Reynolds T, Harris R, Chang WS, Bregulla J, Bawcombe J (2015) Ambient vibration tests of a cross-laminated timber building. Proc Inst of Civ Eng Constr Mater 168(3):121–131. https://doi.org/10.1680/coma.14.00047
Reynolds T, Feldmann A, Chang WS, Harris R, Dietsch P (2016) Design parameters for lateral vibration of multi-storey timber buildings. Int Netw on Timber Eng Res (INTER) Meeting 49 49–20–2
Feldmann A, Huang H, Chang W S, Harris R, Dietsch P, Gräfe M, Hein C (2016) Dynamic properties of tall timber structures under wind-induced vibration. WCTE2016 3575-3584
Aloisio A, Pasca D, Tomasi R, Fragiacomo M (2020) Dynamic identification and model updating of an eight-storey CLT building. Eng Struct 213:110593. https://doi.org/10.1016/j.engstruct.2020.110593
Manthey M, Flamand O, Jalil A, Pavic A, Ao WK (2021) Effect of non-structural components on natural frequency and damping of tall timber building under wind loading. WCTE2021 TE0417
Tulebekova S, Malo KA, Rønnquist A, Nåvik P (2022) Modeling stiffness of connections and non-structural elements for dynamic response of taller glulam timber frame buildings. Eng Struct 261:114209. https://doi.org/10.1016/j.engstruct.2022.114209
Larsson C, Abdeljaber O, Dorn M (2023) Dynamic evaluation of a nine-storey timber-concrete hybrid building during construction. Eng Struct 289:116344. https://doi.org/10.1016/j.engstruct.2023.116344
Loss C, Rossi S, Tannert T (2018) In-plane stiffness of hybrid steel–cross-laminated timber floor diaphragms. J Struct Eng 144(8):04018128. https://doi.org/10.1061/(ASCE)ST.1943-541X.0002105
D’Arenzo G, Casagrande D, Reynolds T, Fossetti M (2019) In-plane elastic flexibility of cross laminated timber floor diaphragms. Constr Build Mater 209:709–724. https://doi.org/10.1016/j.conbuildmat.2019.03.060
Fakhrzarei M, Daneshvar H, Chui YH (2023) Analytical model development for CLT diaphragms loaded perpendicular to the length of panels. J Struct Eng 149(6):04023059. https://doi.org/10.1061/JSENDH.STENG-11727
Omenzetter P, Morris H, Worth M, Kohli V, Uma SR (2011) Long-term monitoring and field testing of an innovative multistory timber building. In: Proc SPIE 7983 nondestructive characterization for composite materials, aerospace engineering, civil infrastructure, and homeland security 2011, p 798335. https://doi.org/10.1117/12.879869
Architectural Institute of Japan (2020) Damping and vibration of buildings. Maruzen, Tokyo
Di Lorenzo G, Formisano A, Krstevska L, Landolfo R (2019) Ambient vibration test and numerical investigation on the St. Giuliano church in Poggio Picenze (L’aquila, Italy). J Civ Struct Health Monit 9:477–490. https://doi.org/10.1007/s13349-019-00346-7
Kurent B, Ao WK, Pavic A, Pérez F, Brank B (2023) Modal testing and finite element model updating of full-scale hybrid timber-concrete building. Eng Struct 289:116250. https://doi.org/10.1016/j.engstruct.2023.116250
Kurent B, Brank B, Ao WK (2023) Model updating of seven-storey cross-laminated timber building designed on frequency-response-functions-based modal testing. Struct Infrastruct Eng 19(2):178–196. https://doi.org/10.1080/15732479.2021.1931893
Ussher E, Gurholt CUD, Mikalsen JN, Aloisio A, Tomasi R (2022) Effect of construction features on the dynamic performance of mid-rise CLT platform-type buildings. Wood Mater Sci Eng 17(4):261–273. https://doi.org/10.1080/17480272.2022.2078223
Tanner T, Moudgil M (2017) Structural design, approval, and monitoring of a UBC tall wood building. Struct Congr 2017:541–547. https://doi.org/10.1061/9780784480410.045
TOKYO SOKUSHIN CO., LTD. (2023) Servo Velocity-meter VSE-15D. Tokyo, Japan. https://www.to-soku.co.jp/en/products/servo/pdf/vse15d_e.pdf. Accessed 25 May 2023
TOKYO SOKUSHIN CO., LTD. (2023) Portable Vibration Monitoring System SPC-52. Tokyo, Japan. https://www.to-soku.co.jp/en/products/portable/pdf/spc_52_e.pdf. Accessed 25 May 2023
Van Overschee P, De Moor B (1996) Subspace identification for linear systems: theory, implementation and applications. Kluwer Academic Publishers, Amsterdam
The MathWorks Inc. (2022) MATLAB version: 9.12.0 (R2022a). The MathWorks Inc., Natick. https://www.mathworks.com
Computers and Structures, Inc. (2023) SAP2000 version 24.2.0. California
CSA Group (2019) CSA A23.3:19 Design of concrete structures
FPInnovations (2019) Canadian CLT Handbook. https://web.fpinnovations.ca/wp-content/uploads/clt-handbook-complete-version-en-low.pdf. Accessed 25 May 2023
Fast P, Gafner B, Jackson R, Li J (2016) Case study: an 18 story tall mass timber hybrid student residence at the University of British Columbia. WCTE2016 22-25
Fritz WP, Jones NP, Igusa T (2009) Predictive models for the median and variability of building period and damping. J Struct Eng 135(5):576–586. https://doi.org/10.1061/(ASCE)0733-9445(2009)135:5(576)
National Research Council of Canada (2020) National Building Code of Canada (NBC) 2020. https://nrc.canada.ca/en/certifications-evaluations-standards/codes-canada/codes-canada-publications/national-building-code-canada-2020. Accessed 25 May 2023
Satake N, Ougiya N, Ito S, Hirata Y, Song S, Shingu K, Shimaoka S (2020) Outline of database and regression analyses on vibration damping data of full-scale buildings and architecture. 17WCEE 2i-0187
Chopra AK (2007) Dynamics of structures: theory and applications to earthquake engineering, 3rd edn. Pearson, London
Satake N, Suda K, Arakawa T, Sasaki A, Tamura Y (2003) Damping evaluation using full-scale data of buildings in Japan. J Struct Eng 129(4):470–477. https://doi.org/10.1061/(ASCE)0733-9445(2003)129:4(470)
Fang JQ, Jeary AP, Li QS, Wong CK (1999) Random damping in buildings and its AR model. J Wind Eng Ind Aerodyn 79(1–2):159–167. https://doi.org/10.1016/S0167-6105(97)00295-X
Larsson C, Abdeljaber O, Bolmsvik Å, Dorn M (2022) Long-term analysis of the environmental effects on the global dynamic properties of a hybrid timber-concrete building. Eng Struct 268:114726. https://doi.org/10.1016/j.engstruct.2022.114726
De Moor B (2003) On the number of rows and columns in subspace identification methods. IFAC Proc 36(16):1759–1764
Bakir PG (2011) Automation of the stabilization diagrams for subspace based system identification. Expert Syst Appl 38(12):14390–14397. https://doi.org/10.1016/j.eswa.2011.04.021
Miyazu Y, Loss C (2023) Lateral vibration data of an 18-story timber-concrete hybrid building obtained by on-site vibration tests. Data Brief 50:109501. https://doi.org/10.1016/j.dib.2023.109501
Acknowledgements
This research was funded by the Government of British Columbia through FII Wood First Program and by the Natural Sciences and Engineering Research Council (NSERC) of Canada through the Discover Program Grant Number RGPIN-2019-04530, and Discovery Launch Supplement, Grant Number DGECR-2019-00265. The authors are also grateful to Asghar AmaniDashlejeh, David Owolabi, Blériot Feujofack, Yue Diao, Demin Feng, Tomomasa Komatsubara, Takehiro Wakita, Hideyuki Kinugasa, Masayuki Nagano, Yoshifumi Ohmiya, and Ai Tomita for their contribution throughout the testing program. The authors would also like to thank Diana Lopez, David Kiloh, Angelique Pilon, Andrew Powter, Andrew Parr, and John Metras for their support in scheduling and coordinating the on-site testing program.
Funding
Open Access funding provided by Tokyo University of Science.
Author information
Authors and Affiliations
Contributions
YM on-site testing, formal analysis, data processing, visualization, writing original draft—review and editing. CL conceptualization, methodology, background information, writing original draft—review and editing. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Miyazu, Y., Loss, C. Evaluation of vibration properties of an 18-story mass timber–concrete hybrid building by on-site vibration tests. J Civil Struct Health Monit 14, 909–929 (2024). https://doi.org/10.1007/s13349-024-00767-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13349-024-00767-z