
Abstract
In this study, the results of a vast experimental campaign on the applicability of a smartphone-based technique for bridge monitoring are presented. Specifically, the vehicle–bridge interaction (VBI)-based approach is exploited as a cost-effective means to estimate the natural frequencies of bridges, with the final aim of possibly developing low-cost and diffused infrastructure monitoring system. The analysis is performed using a common hybrid vehicle, fully equipped with classical piezoelectric accelerometers and a smartphone MEMS accelerometer, to record its vertical accelerations while passing over the bridge. In this regard, the experimental campaign is carried out considering the vehicle moving with a constant velocity on a bridge in the city of Palermo (Italy). Appropriate identification procedures are then employed to determine the modal data of the bridge from the recorded accelerations. Further, comparisons with the results of a standard Operational Modal Analysis procedure, using accelerometers directly mounted on the structure, are presented. Experimental VBI-based analyses are performed also considering the effect of several different vehicle velocities. Further, the applicability of smartphone-based sensor data is investigated, exploiting the possibility of using up-to-date smartphone accelerometers for recording the vehicle accelerations. In this regard, comparison between piezoelectric accelerometers and MEMS ones is performed to assess the reliability of these sensors for the determination of bridge modal properties.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The issue of monitoring a bridge structural condition is an absolute priority worldwide. As is well known, any infrastructure undergoes a progressive deterioration of its structural conditions due to aging given by normal service loads and environmental conditions and, at the same time, it may suffer serious damages or collapse due to natural phenomena such as earthquakes or strong winds. In this regard, researchers, engineers and road network managers have recognized the importance of the so-called Structural Health Monitoring (SHM) procedures for civil infrastructures [1,2,3] which allow for the monitoring of structural conditions and may be useful for the identification of possible damages [4, 5] before costly repairs are required or potential catastrophic consequences may happen. For this reason, it is essential to rely on efficient and widespread monitoring techniques as much as possible throughout the entire road network.
To date, the most adopted ones are based on the so-called Operational Modal Analysis (OMA) identification methods. These encompass a series of procedures for deriving the modal parameters of a structure using the data acquired through many sensors installed directly on site. In this regard, many OMA methods have been discussed in the literature, and they can be generally grouped into two categories according to the domain in which they operate. Methods operating in the time domain include: Natural Excitation Technique (NExT) [6]; Auto-Regression Moving Average (ARMA) and Stochastic Subspace Identification (SSI) [7]. Further, the most commonly employed in the frequency domain are: the Peak Picking (PP), associated with Half Power (HP), and the Frequency Domain Decomposition (FDD) [8].
On this base, it is evident that the major issue for a massive and widespread monitoring of the infrastructures, is related to the excessive cost of the techniques currently in use, mainly due to the cost of the equipment.
In recent years, a possible alternative technique for structural monitoring has been identified in a Vehicle-Bridge Interaction (VBI) based procedure. This is generally referred to an approach in which the state of health of a bridge is monitored by estimating its modal properties, analyzing the vertical accelerations acquired from appropriately instrumented vehicles passing over the infrastructure. Therefore, this approach would allow monitoring the health condition of infrastructures without the need for any equipment on the structures, thus greatly lowering the costs with respect to a classical SHM systems.
In this regard, first contributions can be found in [9, 10], where it has been demonstrated how it is possible to extract both the natural frequency of the vehicle and the natural frequencies of the bridge from the vertical component of the vehicle acceleration.
Some experimental verifications have been carried out afterward in the following years. Some of these were conducted using a small two-wheel cart [11] or a hand-drawn cart [12]. In other tests, normal vehicles have been utilized. Specifically, in [13] a method to eliminate the influence of the pavement roughness from the acquisition made by the sensor on the vehicle has been proposed. Moreover, in [14], the possibility of using a public bus equipped with vibration measurement instrumentations is discussed in order to evaluate the bridge condition through the definition of a structural anomaly parameter which allow to judge when the structure is at a critical stage of deterioration. Nevertheless, still few experimental tests have been performed for VBI-based monitoring, due to the novelty of the aforementioned approach. Note also that no test has been carried out with hybrid or electric car yet.
In the last years, the researchers have tried to optimize the method by adopting different strategies: for instance, in [15] three different filters have been used in order to make the frequencies of the bridge more evident than the vehicle one. In [16] the adoption of the Empirical Mode Decomposition (EMD) technique has been proposed for processing of the vehicle measurements to more clearly identify frequencies and modes of the bridge. Others have recently considered the implementation of traditional OMA methods, appropriately adapted to the VBI approach, considering both the procedures working in the time domain [17] and in the frequency domain [18]. In particular, in [17] the well-known SSI technique is used in an indirect procedure that requires a sensor in the vehicle passing over the bridge and a fixed sensor on the bridge itself used as reference. As far as the methods based on the frequency domain are concerned, in [18] the possibility to determine both the main frequencies of the bridge as well as its modal shapes is investigated. In this regard, the use of the Hilbert transform combined with the Frequency Domain Decomposition method (FDD), appropriately adapted for the vehicle acquisitions, has been proposed.
In this context, it should be mentioned that, since the methods based on VBI require a lot of data to be effective, mobile crowd-sensing could be a solution to this issue. Crowd-sensing-based system refers to an innovative technology that exploits the possibility of sensors, employed in commonly used smartphones or even in the most modern vehicles, to collect and accurately examine a large amount of data. Many are the applications considered in the last years [19] but the studies which explore the adoption of this technology, in the field of indirect monitoring are very few. For instance, in [20] the authors experimentally obtained up to the third frequency of the bridge only using smartphone sensors installed in the vehicles crossing the bridge. Notably, it has been shown that the accuracy of the results increased when employing data from several smartphones. For this reason, it is necessary to further investigate on the reliability of the Micro Electro-Mechanical Systems (MEMS) sensors, that are installed in the common smartphones, in comparison with the classical piezoelectric accelerometers.
In this regard, the objective of this study is to further experimentally assessing the accuracy and applicability of the VBI-based monitoring technique, analyzing the data of a vast experimental campaign carried out on a bridge in the city of Palermo (Italy). Specifically, this study aims to investigate the influence of two main variables on the results achieved from the VBI-based procedure. Firstly, the effect of the velocity of the instrumented car is investigated. To this end, many passages of the car, employing three different constant velocities, have been carried out on the bridge. In addition, this study investigates on the feasibility of using widespread MEMS accelerometers commonly employed in the smartphones of everyday use. To this end, the whole experimental campaign has been carried out considering simultaneous acquisitions from piezoelectric accelerometers and MEMS ones (using a normal smartphone), and pertinent comparisons are provided. From these data, useful insights about the feasibility of this kind of approach in the field of structural health monitoring are drawn.
2 Mathematical background
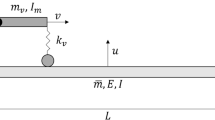
As previously mentioned, the first studies on the possibility of using a VBI-based technique for determining the modal characteristics of the infrastructure are relatively recent. The idea behind it is the following: the dynamic response (in terms of vertical accelerations) of a vehicle passing on a bridge is influenced by the response of the structure itself. In this regard, the idea of this indirect procedure, which uses a moving vehicle as both the exciter and the receiver of the bridge vibration, has been firstly proposed by Yang et al. [5]. In these studies, the applicability of the procedure is mathematically assessed considering the equations of motion governing the problem of a simply-supported beam of length L with smooth pavement crossed by a sprung mass \(m_{{\text{v}}}\) with a spring of stiffness \(k_{{\text{v}}}\), as shown in Fig. 1.

Structural diagram of the vehicle–bridge interacting system
Clearly, this is the simplest model that can be taken into account to study the dynamic interaction between the moving vehicle and the bridge. In this regard, the equations of motion governing the vertical vibration of the bridge and the moving vehicle are:
where \(y_{{\text{v}}} \left( t \right)\) is the vertical deflection of the sprung mass, v is its constant velocity and \(m_{v}\) its mass; \(u\left( {x,t} \right)\) is the displacement of the beam, E denotes the elastic modulus, I the moment of inertia while μ is its mass; finally \(\delta \left( \cdot \right)\) is the Dirac’s delta function evaluated at the contact point \(x = vt\). Note that a dot over a variable stands for derivation with respect to time t and the apex stands for derivation with respect to x. Further, the contact force between the beam and the sprung mass is expressed as follow
where g is the acceleration of gravity.
The approximate response of the beam can be determined taking into account only the first mode of vibration, that is
where \(y_{b} \left( t \right)\) is the beam midspan vertical displacement over time.
Substituting this expression into (1) and (2) and integrating, the system of coupled equations of motion are as follows
where \(\omega_{{\text{b}}}\) and \(\omega_{{\text{v}}}\) are the bridge and the vehicle circular frequencies, respectively, that are given as
Further, hereinafter, the corresponding values in Hz will be denoted as \(f_{{\text{b}}}\) and \(f_{{\text{v}}}\), respectively.
Assuming that the mass of the vehicle is an order of magnitude less than the bridge one, the solution related to the vertical displacement of the beam is
where
and
As it can be seen, the response of the vehicle is characterized by four specific frequencies:
-
i.
\(\frac{2\pi v}{L}\): “pseudo-frequency” given by the motion of the vehicle;
-
ii.
\(\omega_{{\text{v}}}\): vehicle frequency;
-
iii.
\(\omega_{{\text{b}}} + \left( {\frac{\pi v}{L}} \right);\;\omega_{{\text{b}}} - \left( {\frac{\pi v}{L}} \right)\): frequencies related to the first bridge frequency and translated due to the motion.
Next, once \(y_{{\text{b}}} \left( t \right)\) has been obtained, a frequency domain analysis can be directly performed using standard Fourier Transform (FT). In this regard, by Fourier transforming the vertical component of the vehicle acceleration, the spectrum in the frequency domain is obtained as can be seen in the Figs. 2 and 3, where the following set of parameters have been used: \(L = 140\;{\text{m}};\,\mu = 2800\;{\text{kg}}/{\text{m}};\) \(E = 2.75 \times 10^{7} \;{\text{kN/m}}^{2} ;I = 3.12\;{\text{m}}^{4} ;\) \(\omega_{{\text{b}}} = 2.78\,{\text{rad}}/{\text{s}};\;f_{{\text{b}}} = \omega_{{\text{b}}} /2\pi = 0.44\;{\text{Hz}}\). Specifically, two different investigations have been performed. The first one is aimed at showing the influence of the vehicle velocity in the determination of the bridge frequency, while the second one has been carried out to show the importance of knowing a priori the frequency of the vehicle to perform the modal identification through a VBI-based method.

Fourier transform of the vertical component of vehicle acceleration in the case of four different constant vehicle velocities (pseudo-frequency—green solid line; bridge first frequency—red dashed line; vehicle frequency—blue dotted line)

Fourier transform of the vertical component of vehicle acceleration in the case of four different vehicle’s frequencies (pseudo-frequency—green solid line; bridge first frequency—red dashed line; vehicle frequency—blue dotted line)
In this regard, as it can be seen in Fig. 2, considering the minimum speed reported (5 m/s), the highest peak in the FT is quite close to the bridge first frequency 0.44 Hz (the red dashed line). On the other hand, considering higher crossing speeds, the first natural frequency of the bridge becomes more difficult to identify. In fact, in case of 15 m/s and 20 m/s there are two peaks related to the frequency of the bridge which are translated with respect to \(f_{b}\) due to the speed of the vehicle.
Further, in Fig. 3, a similar analysis is reported considering four different vehicle frequencies. In this case the vehicle velocity has been set equal to 10 m/s. Results stress the importance of knowing the frequency of the vehicle before a test based on the VBI method is carried out. This problem occurs because of the impossibility to distinguish between the first bridge frequency and the vehicle one if the latter is unknown. This issue is clearly shown by the results obtained with 0.4 Hz as vehicle frequency. In this case, both the frequency of the vehicle and of the bridge are extremely close and this makes impossible to determine which is the natural frequency of the bridge. On the contrary, considering higher vehicle frequencies than that of the bridge, the two appear to be clearly separated in the frequency domain.
3 Identification using classical OMA procedure
Based on the theoretical analysis above described, a thorough experimental campaign has been carried out over a bridge in the city of Palermo (Italy). However, prior to the application of the proposed VBI-based approach, standard OMA identification procedure has been performed to identify the main natural frequencies of the bridge. Pertinent frequency values have been then used as a reference for assessing the reliability of the VBI-based approach.
3.1 Tested bridge
One bridge of the city of Palermo (Italy), namely the Corleone bridge (Fig. 4), has been selected for the tests.

Floor plan and section of Corleone bridge
The Corleone bridge is located in the south-west part of the city, and it was built between 1958 and 1965. The bridge comprises two different and separate decks, one for each lane, namely one towards the city of Catania (CT) and the other towards the city of Trapani (TP). Each structure is a reinforced concrete bridge, consisting of a system of three arches arranged in parallel. These arches support a total of 48 piles which are paired up into two and based on 8 different points of each arch. The aforementioned piles directly support the deck, about 1 m thick, consisting of a multi-span beam on which the roadway is built. The overall span that stands out at a maximum height of 30 m, is wide and long about 14 m and 140 m, respectively. The direct and superficial foundations rest on the rocks of the limestone complex. Each set of piles, about 2.60 m apart from each other, supports a roadway of about 10.50 m in width as well as a cantilevered sidewalk of 2.40 m.
3.2 Experimental set-up
The application of the standard OMA identification procedure requires the use of accelerometers directly positioned over the bridge. Therefore, as previously mentioned, this procedure may be rather complex and expensive due to the use of many sensors to be positioned for each test. In this experimental campaign, the piezoelectric accelerometers Seismic Miniature ICP Accelerometer PCB—model 393B31 have been used to acquire the response in terms of vertical accelerations of the bridge. The accelerometers have been connected to a PC thanks to the Digital ICP®-USB Signal Conditioner 485B39, which conditions and returns the digitized signal simply by connecting the ICP via the USB port to the computer. Further, signals have been acquired using a self-developed code in LabView environment, using a 1000 Hz sampling frequency.
As far as the position of the accelerometers is concerned, taking into account the structural characteristic of the bridge, which comprises a separate multi-span beam for each roadway, two accelerometers have been used for each side, and rigidly connected over the sidewalks as close as possible to the road. In this regard, Fig. 5 shows the position of the accelerometers over the bridge, while in Fig. 6 the experimental set-up used for the OMA test is depicted.

Position of the accelerometer on the bridge

The experimental set-up for the OMA tests
Note that, in this case, just two accelerometers have been employed since the aim was just to use these data to validate the results of VBI-based approach and to promptly have a first indication of the main frequencies of the bridge. However, as specified above, for an extensive OMA-based test, a more expensive set-up would be required (10–15 piezoelectric accelerometers for each deck) resulting a time-consuming procedure.
3.3 Analysis of the results of the OMA tests
Data of the two accelerometers for each direction have been acquired and processed in MATLAB environment. Specifically, approximately 10 min of acquisition has been performed, and the recorded signals have been then filtered using a band-pass filter between 0.5 Ha and 30 Hz. Next, the corresponding Power Spectral Density (PSD) functions have been computed using the Welch method, subdividing the entire record in segments of 20 s each, and employing an Hanning window with an overlap of 20% between the segments.
Pertinent PSDs are shown in Figs. 7 and 8 for the two accelerometers for each direction, highlighting the peaks related to the main frequencies of the structure. Corresponding results are also reported in Table 1 for sake of clarity.

Power Spectral Density of the accelerometers in the roadway direction towards CT

Power Spectral Density of the accelerometers in the roadway direction towards TP
As it can be seen in these figures, and as reported in Table 1, the frequencies pertaining to the two different roadways are very close, except for the first frequency of the roadway in the direction towards CT (Fig. 7) \(f_{{{\text{b}}1}} = 1.96\,{\text{Hz}}\) and the fifth \(f_{{{\text{b}}5}} = 4\;{\text{Hz}}\), which do not appear in the PSD related to the direction towards TP (Fig. 8). These few discrepancies may be due to different level of degradation and some distinct structural features among the two structures that could certainly warrant further investigation. For this reason, due to the differences found on modal parameters that are strictly connected to the dynamic behavior of the structure, the two roadways have been analyzed separately.
4 Identification using the VBI-based approach
The proposed VBI-based identification procedure is here discussed. In this regard, tests have been performed simply using the recorded accelerations of an instrumented car moving over the selected bridge. To this aim, a different acquisition system has been required, and some preliminary tests on the vehicle itself have been carried out, as detailed in the following.
4.1 Experimental set-up
The vehicle used for this test is a Toyota RAV4 hybrid car (Fig. 9). The choice of hybrid vehicles is due to the fact that, in this manner, vibrations related to the thermal engine may be decreased. Note that, to the best of the author’s knowledge, the use of hybrid or electric cars has never been investigated in the literature for the proposed VBI-based technique.

Test vehicle
In the experimental campaign, the piezoelectric accelerometer Seismic Miniature ICP Accelerometer PCB—model 393B04 has been used to acquire the response in terms of vertical accelerations of the vehicle. Notably, this accelerometer features high sensitivity, wide frequency range, small size and low weight, thus making them particularly suitable for their use in the test car. The piezoelectric accelerometer has been then positioned in an area as close as possible to the center of the car, under the front seats, as shown in Fig. 10.

Position of the PCB accelerometers: PCB 393B04
Again, the accelerometer has been connected to a PC thanks to the Digital ICP®-USB Signal Conditioner 485B39, and signals have been acquired using a self-developed code in LabView environment, using a 1000 Hz sampling frequency.
In addition to the PCB piezoelectric accelerometer, the vehicle vertical accelerations have been acquired through a MEMS-type accelerometer installed on an Apple smartphone (iPhone 11). The smartphone that houses the MEMS accelerometer has been positioned under the front passenger seat of the vehicle (Fig. 11), properly fixed, in a way that is as integral as possible with the car. It is worth mentioning that the accelerations for the smartphone have been acquired using the MATLAB Mobile app, considering a 100 Hz sampling frequency (that is the highest possible).

Position of the smartphone
In this regard, note that the MEMS accelerometer has been added to the set-up to compare the results obtained using this low-cost and widespread technology and with those obtained from the much more expensive piezoelectric accelerometers.
4.2 Modal identification of the vehicle
The first part of the experimental campaign has been dedicated toward obtaining the main frequencies of the instrumented vehicle. To this aim, the test has been performed on a flat straight road, keeping a constant speed of 15 km/h for the entire duration of the test, for a total duration of 130 s. The recorded signal has been then processed in MATLAB environment. Specifically, the signal has been filtered using a band-pass filter between 0.5 and 30 Hz. Next, the pertinent PSD function has been computed using the Welch method, subdividing the entire record in segments of 10 s each, and employing an Hanning window with an overlap of 25% between the segments. In this regard, the estimated PSD of the vertical acceleration of the vehicle is shown in Fig. 12, where the peaks related to the frequencies of the vehicle are also highlighted.

Power Spectral Density of the vehicle’s acceleration during the test over the flat road
As it can be seen in this figure, five main frequencies of the vehicle can be identified, that is: \(f_{{{\text{v}}1}} = 1.42\,{\text{Hz}};\,f_{{{\text{v}}2}} = 1.55\,{\text{Hz}};\) \(f_{{{\text{v}}3}} = 1.8\,{\text{Hz}};\,f_{{{\text{v}}4}} = 3.2\,{\text{Hz}};\,f_{{{\text{v}}5}} = 4.9\,{\text{Hz}}\). As expected, the vehicle, being a multibody complex system, is characterized by many frequencies even closely-spaced [21] and its motion is influenced by various factors. One of these is rocking phenomenon which is determined by the different stresses on the wheels due to the road surface roughness [22]. The corresponding rocking mode, as well as the vertical and lateral ones, are the main modes to which the respective frequencies characterizing the vehicle are associated.
4.3 Description of the experimental campaign
Once the main frequencies of the vehicle have been identified, the tests on the Corleone bridge have been performed to assess the validity of the VBI-based identification technique. Taking into account the structural characteristic of the bridge, which comprises two separate decks, the VBI-based procedure has been carried out considering seven passages of the test vehicle on each deck (towards CT and towards TP). Further, aiming at investigating on the influence of the vehicle’s velocity on the accuracy of the proposed approach, three different cases have been considered, corresponding to three different constant velocities of the vehicle employed for the tests, namely:
-
Case #1: v = 15 km/h;
-
Case #2: v = 20 km/h;
-
Case #3: v = 30 km/h.
In this manner, for each case, 14 passages have been performed with the instrumented car, for a total of 42 passages over the bridge.
5 Analysis of the results and discussion
For each test, the vertical accelerations of the vehicle moving over the bridge have been recorded with both the piezoelectric accelerometer and the smartphone (MEMS accelerometer), as previously mentioned. In this regard, it should be mentioned that each signal may have a different duration, due to possible small deviations from the chosen speed. Therefore, a specific procedure has been set up for the data analysis and the identification of the bridge frequencies. Specifically:
-
i.
For each deck and each velocity of the vehicle, the seven recorded signals have been collected and filtered with a band-pass filter between 0.5 Hz and 30 Hz, and a detrend procedure has been also performed if necessary.
-
ii.
A window function has been applied to each of these signals. Specifically, a Tukey window has been used, defined by a length equal to the length of the signal, and the so-called cosine fraction parameter equal to 0.1.
-
iii.
The filtered and windowed signals have been connected, from the first to the seventh one, so as to realize a single record comprising all the seven signals acquired for each velocity and each deck of the bridge. A sample of this procedure is shown in Fig. 13.
-
iv.
The PSD of the single record has been then determined using standard Welch procedure, generally subdividing the record in ten segments and 25% overlap between adjacent segments.
-
v.
The frequencies of the vehicle and of the bridge have been identified from the pertinent PSD using classical peak-picking procedure.

The single record comprising the seven samples
In this regard, in Figs. 14 and 15 results are reported for Case #1, corresponding to v = 15 km/h. Specifically, Fig. 14 shows the PSD functions obtained using the VBI-based approach on the deck towards CT, whereas in Fig. 15 corresponding data related to the deck towards TP are depicted. Note that in these figures, the PSD functions related to both the piezoelectric accelerometer (black dash-dotted line) and the smartphone MEMS accelerometer (red dashed line) are shown, vis-à-vis the PSD function obtained averaging these two sets of data (black line).

VBI-based PSD of the deck in the direction towards CT

VBI-based PSD of the deck in the direction towards TP
As it can be seen in these figures, again the first two peaks of the PSD, namely \(f_{{{\text{v}}1}}\) and \(f_{{{\text{v}}2}}\), are very close to the first two frequencies identified for the vehicle and shown in Fig. 12. Clearly, the other peaks of the PSD can be related to the main frequencies of the bridge, namely \(f_{{{\text{b}}1}}\) to \(f_{{{\text{b}}5}}\) in Figs. 14 and 15.
In this regard, pertinent values of the identified bridge frequencies are reported in Tables 2 and 3, and compared with the values shown in Table 1, obtained applying the standard OMA procedure and herein used as reference values. As can be observed from these tables, paying particular attention to discrepancy values, VBI-based results well agree with the frequencies identified using the traditional OMA approach carried out with a very simplified set-up. In particular, the discrepancies between the frequencies identified with the two methods, are nearly always around 2–3% (with only one value with a discrepancy over 4% in the second mode). These differences may be acceptable, even in a continuous monitoring perspective, considering that generally the monitoring scheme is based on the relative change of the frequencies’ values over the years obtained using the same monitoring procedure rather than discrepancies between the values identified by various methods. These changes, in fact, may be symptom that the mechanical behavior of the structure is varying. Nevertheless, it should be noted that, the real applicability of a VBI-based approach for a long-term monitoring has never been attempted so far in the literature and still needs to be experimentally proved [23].
Further, it should be noted that data obtained with the smartphone accelerometer closely agree with those pertaining to the classical piezoelectric one, thus assessing the possibility of using this widespread and low-cost technology for performing the proposed VBI-based approach. In this regard, considering the very simple set-up required for the tests with the smartphone, this could represent an important step towards the implementation of a monitoring system that may be easily applied to many infrastructures, without any additional cost.
As far as the influence of the vehicle’s velocity on the accuracy of the results is concerned, Figs. 16 and 17 show the comparison of the PSD functions pertaining to the three aforementioned cases, related to the decks towards CT and to TP, respectively. Specifically, in each figure three PSD functions are reported, that is Case #1 for v = 15 km/h (black line), Case #2 for v = 20 km/h (red dashed line), and Case #3 for v = 30 km/h (purple dash-dotted line). Note that, in these figures results obtained using just the smartphone accelerometer data are shown, together with the frequency peaks related to Case #1 (v = 15 km/h) of Figs. 14 and 15 as reference.

VBI-based PSD of the deck in the direction towards CT

VBI-based PSD of the deck in the direction towards TP
As it can be seen in these figures, as soon as the vehicle’s velocity increases, the corresponding peaks of the PSD functions clearly move away from the identified natural frequencies of the bridge. Therefore, the evaluation of the main frequencies of the structure related to the two PSD functions obtained with higher vehicle’s velocity, that is Case #2 and Case #3, is hindered by the excessive velocity of the vehicle. Overall, data show that low vehicle’s velocity would be required for an accurate estimation of the structural frequencies when the VBI-based approach is employed. Notably, these results confirm those numerically determined using the simple model in Sect. 2.
In conclusion, it should be noted that results reported in Figs. 14, 15, 16 and 17 show a considerable number of relative maxima. However, as it can be seen in Figs. 14 and 15, PSDs related to the lowest vehicle’s speed more clearly show the peaks corresponding to the first bridge natural frequencies. Further, a combination of a preliminary OMA-based test, carried out with a very simple set-up, and the proposed VBI-based procedure (using an appropriate vehicle speed), as here defined, could be employed to facilitate the dynamic identification of the structural parameters.
6 Concluding remarks
The feasibility of a vehicle–bridge interaction (VBI) based identification approach, in which a passing vehicle is used as a moving sensor to estimate the natural frequencies of a bridge, has been tested in this study. First, a mathematical background of the problem has been presented, and the equations of motion which govern the interaction phenomenon between the vehicle and the bridge have been analyzed. With this aim, different variables that influence the correct application of the proposed procedure have been analyzed. In this regard, it has been pointed out that the velocity of the test vehicle and its frequency represent the main features to influencing the VBI-based identification procedure.
On this base, a vast experimental campaign has been carried out to examine the validity of the proposed method for the dynamic identification of the structures. Specifically, tests have been carried out on the Corleone bridge in Palermo (Italy). Notably, for the first time, aiming at reducing the mechanical vibrations related to the use of common vehicles with thermal engine, in these tests, a hybrid car has been employed. Further, the vehicle’s vertical accelerations have been acquired using both a classical piezoelectric accelerometer and a common smartphone, that is equipped with a MEMS accelerometer. In this manner, the possibility of exploiting this widespread and low-cost technology for performing the VBI-based approach has been investigated. Further, tests have been also carried out considering several vehicle’s velocity to investigate the influence of this parameter on the accuracy of the procedure. Finally, results have been compared with data obtained applying a classical Operational Modal Analysis identification procedure, using piezoelectric accelerometers rigidly connected to the structure.
In this regard, results have shown that the velocity of the vehicle is crucial to obtain the best possible results. Specifically, it has been noticed that the accuracy of the procedure increases as soon as the velocity of the vehicle decreases, confirming the numerical results of the mathematical model. Further, by comparing the results obtained with the smartphone MEMS accelerometer and those obtained by the classical piezoelectric one, it has been shown how even this low-cost and commonly employed technology allows to obtain accurate results. Notably, this is particularly important for a possible future implementation of a crowd-sensing system for a massive monitoring of the infrastructures in our road network, which could be based on the use of the proposed VBI approach.
References
Li HN, Ren L, Jia ZG, Yi TH, Li DS (2016) State of the art in structural health monitoring of large and complex civil infrastructures. J Civ Struct Heal Monit 6:3–16
Carden EP, Fanning P (2004) Vibration based condition monitoring: a review. Struct Health Monit 3:355–377
Fan W, Qiao P (2011) Vibration-based damage identification methods: a review, comparative study. Structural Health Monitoring 9.
Cottone G, Pirrotta A, Salamone S (2008) Incipient damage identification through characteristics of the analytical signal response. Struct Control Health Monit 15:1122–1142
Barone G, Marino F, Pirrotta A (2008) Low stiffness variation in structural systems: Identification and localization. Struct Control Health Monit 15:450–470
James GH, Carne T, Lauffer J, Nard AR (1992) Modal testing using natural excitation. In: Proc of the 10-th IMAC, Santiago, CA, USA
Peeters B, De Roeck G, Pollet T, Schueremans L (1995) Stochastic subspace techniques applied to parameter identification of civile engineering structures. In: Proceedings of new advances in modal synthesis of large structures: nonlinear, damped and nondeterministic cases, pp 151–162
Brincker R, Zhang L-M, Anderson P (2000) Modal identification from ambient response using Frequency Domain Decomposition. In: Proceedings of IMAC XVIII, San Antonio, TX, USA
Yang Y-B, Lin C, Yau J (2004) Extracting bridge frequencies from the dynamic response of a passing vehicle. J Sound Vib 272:471–493
Yang YB, Lin C (2005) Vehicle-bridge interaction dynamics, potential applications. J Sound Vib 284:205–226
Yang YB, Lin C (2005) Use of a passing vehicle to scan the fundamental bridge frequencies: an experimental verification. Eng Struct 27:1865–1878
Yang Y-B, Chen W-F, Yu H-W, Chan C (2013) Experimental study of a hand-drawn cart for measuring the bridge frequencies. Eng Struct 57:222–231
Wang H, Nagayama T, Nakasuka J, Zhao B, Su D (2018) Extraction of bridge fundamental frequency from estimated vehicle excitation through a particle filter approach. J Sound Vib 428:44–58
Miyamoto A, Yabe A (2011) Bridge condition assessment based on vibration responses of passenger vehicle. J Phys: Conf Ser 305:1–10
Yang Y, Chang K, Li Y (2013) Filtering techniques for extracting bridge frequencies from a test vehicle moving over the bridge. Eng Struct 48:353–362
Yang Y, Chang K (2009) Extraction of bridge frequencies from the dynamic response of a passing vehicle enhanced by the EMD technique. J Sound Vib 322:718–739
Li J, Zhu X, Law SS, Samali B (2019) Indirect bridge modal parameters identification with one stationary and one moving sensors and stochastic subspace identification. J Sound Vib 446:1–21
Malekjafarian A, OBrien E (2014) Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng Struct 81:386–397
Alavi AH, Buttlar WG (2019) An overview of smartphone technology for citizen-centered, real-time and scalable civil infrastructure monitoring. Futur Gener Comput Syst 93:651–672
Matarazzo TJ, Santi P, Pakzad SN, Carter K, Ratti C, Moaveni B, Osgood C, Jacob N (2018) Crowdsensing framework for monitoring bridge vibrations using moving smartphones. In: Proceedings of the IEEE 106
Sani MSM, Rahman MM, Noor MM, Kadirgama K, Izham MHN (2011) Identification of dynamics modal parameter for car chassis. Mater Sci Eng 17:12–38
Shi K, Moa XQ, Xu H, Wang ZL, Hu XS, Yang YB (2022) Furthering extraction of torsional–flexural frequencies for thin-wall beams from the rocking motion of a two-wheel test vehicle. Thin-Walled Struct 175:109–224
Shokravi H, Shokravi H, Bakhary N, Heidarrezaei M, Koloor S, Petru M (2020) Vehicle-assisted techniques for health monitoring of bridges. Sensors 20:3460
Acknowledgements
Authors gratefully acknowledge the financial support of the project PO FESR 2014–2020 Crowdsense, and the support received from the Italian Ministry of University and Research, through the PRIN 2017 funding scheme (project 2017J4EAYB 002—Multiscale Innovative Materials and Structures “MIMS”).
Funding
Open access funding provided by Università degli Studi di Palermo within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Di Matteo, A., Fiandaca, D. & Pirrotta, A. Smartphone-based bridge monitoring through vehicle–bridge interaction: analysis and experimental assessment. J Civil Struct Health Monit 12, 1329–1342 (2022). https://doi.org/10.1007/s13349-022-00593-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13349-022-00593-1