
Abstract
In this paper, a three-dimensional laser scanner was used to monitor the displacement of retaining structures for excavation, including a ring beam and a reinforced soil mixing wall (SMW) at an open excavation site. Eight scans of the retaining structures were taken before and after the excavation. Three-dimensional point clouds of the retaining structures produced with these scans are registered and analyzed to determine displacements of the retaining structures. Cloud to Mesh (C2M) method is used to identify displacement along the length of ring beam and depth of the SMW. The displacement obtained is then validated against displacement measured by the total station. The surface of the ring beam is flat so that the displacement of the ring beam can be estimated by the C2M. There was soil collapse and deposition on the surface of the SMW, which can affect the estimation of displacement in the cloud comparison. Therefore, a CANUPO machine-learning algorithm is applied to detect these areas and to remove the point clouds affected by soil collapse and deposition. The displacement is re-estimated based on the revised point clouds. The re-estimated displacement by the CANUPO method is more uniformly changed with the depth of the SMW than results without the CANUPO method, and the horizontal displacement due to excavation can be calculated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Retaining structures are generally constructed before excavation to prevent excessive ground movement. Failure of retaining structures during construction often leads to severe accidents. Therefore, it is essential to monitor and predict the displacement of retaining structures during construction. Traditional displacement measurement techniques such as total station, inclinometer, and tilt meter measurement can take measurements at discrete key points where the sensors or targets are installed [1]. However, large displacements can occur where the sensors do not cover. On the contrary, a laser scanner can capture the three-dimensional geometry of the surface of a structure across its dimension, and the consequential three-dimensional profile can be analyzed for displacement monitoring.
Terrestrial laser scanning was initially an advancement in geodetic survey techniques. As the accuracy and resolution of three-dimensional (3D) laser scanning techniques have advanced significantly in recent years, it has been used in various applications, including quantification of sediment transportation [2,3,4], assessment of slope stability [5], the survey of forest vegetation [6], and even the moisture content of building exterior [7]. Terrestrial laser scanning is non-destructive, efficient for a large area, and provides high spatial resolution. Three-dimensional (3D) laser scanning techniques have evolved significantly in recent years concerning accuracy and resolution and, now, demonstrates excellent potential for structural displacement monitoring. More recently, laser scanning in the monitoring of structural deformation has also been applied in various infrastructures. These applications include monitoring of deformation of historical architectures [8,9,10,11], long-span steel truss bridge caused by thermal expansion and contraction [12], composite arch structure under compression [13], highway retaining wall [14,15,16] under earth pressure, concrete pedestrian tunnel [17] with artificial displacement, masonry tunnel [18] under earth pressure, and bridges [19] due to service load, and a mechanically loaded hull section [20]. However, its applications in structural displacement monitoring are still relatively limited because of three main aspects of limitation, which are: (a) specialized operational skill and relatively high expense requirements (purchase or rental of a laser scanner) to acquire the 3D point clouds; (b) heavy dependency on numerical technique and considerable computational power to process the 3D point cloud; (c) the accuracy of measurement is generally inferior to that of the traditional structural displacement monitoring method. Given these limitations, the performance of laser scanning methodology depends on the specific configurations of individual sites, where variable excavation activities, supporting structures, and displacement monitoring requirements may present. It is helpful to carefully evaluate the case-specific feasibility and contribution of applying laser scanning technology in addition to traditional survey technology [21]. Therefore, it is worthwhile to explore the applicability of laser scanning and solve encountered problems on specific sites. Acikgoz et al. [18] applied laser scanning to monitor the deformation of the masonry tunnel below excavation. During the monitoring period, reference targets were disturbed due to construction work and accurate registration of multi-temporal scans based on reference targets were not realized. By utilizing Iterative Piecewise Alignment Method (IPAM) and discrete measurement by total station as constraints, deformation profile across the arch of the masonry tunnel without fine registration of point clouds can be produced. Oskouie et al. [14] monitored vertical settlement of highway retaining walls using laser scanning. As the vertical settlement is approximately co-planar with the retaining wall itself. It was not possible to use local normal based distance estimation method to calculate vertical settlement. Oskouie et al. [14] designed an algorithm to extract point clouds representing gaps between concrete panels on the retaining wall as homologous parts in multi-temporal scans. And those point clouds representing gaps between concrete panels were used to determine vertical settlements between multi-temporal scans. The previous aforementioned researches on application of laser scanning on structural monitoring were focused on structures in service. The current research is conducted on an on-going excavation site, where the laser scanning has not been applied.
In this research, laser scanning is applied on an excavation site to evaluate the displacement of the entire retaining structure composed of concrete beams and soil mixing wall (SMW). The CANUPO [22] method was also applied to minimize monitoring errors of laser scanning during the excavation. Three main procedures, data acquisition, data registration, and point cloud distance calculation, should be conducted to achieve displacement estimation with laser scanning on construction sites. During the excavation process, these retaining structures are scanned to produce 3D point clouds. 3D point clouds of the retaining structures produced by laser scans are registered in one consistent coordinates system. Then the differences between the baseline scan and subsequential scans are analyzed to determine displacements of the retaining structures. The displacement obtained using 3D laser scanning is compared with and supplemented by displacement measurement by total station. However, it has been found that the soil covering the SMW surface significantly deformed between the 1st and the final scan. During excavation, soil on the surface of SMW can fall off. The loss of soil on the surface during excavation and the soil deposition at the bottom of the retaining structure can make an over or underestimation of the displacement in the analysis of laser scanning results. The position where the soil has deformed should be recognized and disregarded before the displacement estimation can be conducted correctly. Manual inspection to recognize the soil deformation would be possible but tedious. Thus, a machine learning method named CANUPO [22] is adopted to detect soil deformation in a more automated way. The CANUPO method can classify point clouds by their local dimensionality. The classification based on dimensionality well suits the detection of local deformation of soil. Therefore, in this paper, the monitoring error is minimized by separating and removing the area where the soil has been fallen using CANUPO classification.
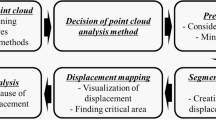
The structure of the rest of this paper is laid out as follows. Section 2 explains the site conditions and monitoring requirements. Three main procedures, namely data acquisition, data registration, and point cloud distance calculation, are introduced in Sect. 3 sequentially. Following the procedures described in Sect. 3, the preliminary estimation of the displacement profile of retaining structures is obtained and presented in Sect. 4. However, the preliminary estimation of SMW displacement is erroneous due to the effect of soil deformation on the surface of SMW. Thus, in Sect. 5, a machine learning method named CANUPO [22] are used to detect and remove the area in SMW with surface soil deformation. After removing the area in SMW with surface soil deformation, the displacement profile of SMW is re-estimated and presented. In Sect. 6, the conclusions of this research are provided.
2 Site conditions and data collection
2.1 Introduction of site and data collection
In this study, a retaining wall composed of soil mixing walls (SMW) and a ring beam was constructed before excavation at a construction site. The design excavation depth is 5.7 m. (see Fig. 1a). The excavation was conducted in two separate phases. The first excavation phase was conducted from the 15th May 2018 till the 20th May 2018, reaching 3.8 m from the ground surface. The second excavation phase was performed from the 17th June 2018 to the 28th July 2018, reaching the design excavation depth. Although the ring beam and SMW were constructed to obtain the stability of the retaining wall, the stability of the retaining structure might be compromised by improper construction or weak ground conditions. Therefore, it is necessary to define the stability of the retaining wall during excavation. The displacement of the retaining wall structure is a key indicator that reflects the structure response based on the excavation of soil and is generally monitored by a monitoring system like a total station during the construction. In this paper, the displacement on top of the ring beam was monitored by the total station. The total station was performed daily basis throughout the excavation process. However, the total station can analyze the stability only for a point where the target of the total station was installed. Suppose local failure of SMW occurs due to weak ground and construction conditions. In that case, it is impossible to evaluate the stability where the monitoring technique is not installed. Therefore, in this paper, three-dimensional laser scanning was applied to determine the global and local behaviors of the retaining structure.

Introduction of site
A laser scanner of the Leica P40 model was used in the test. The laser scanner rotates horizontally and vertically. For the measurement of each point, the scanner emits a pulsed laser light towards the object and receives the reflected pulsed laser light. A three-dimensional point cloud can be obtained by expressing points in three-dimensional coordinates by evaluating a distance from the speed of the laser and the time of the reflected laser. The critical parameters of the Leica P40 laser scanner are provided in Table 1.
In this paper, a total station was used to evaluate the displacement of the retaining wall structure, and the location of the target for total station measurement is also shown in Fig. 1b. Laser scanning was applied to scan the entire retaining wall of about 40 m in length. Multiple scanning is performed during the excavation, so three reference targets were installed to merge the scanned multiple point clouds in one coordinate (see Fig. 1b). The laser scanner was carried out on another sidewall that was already excavated. Scanning was carried out at the same position as possible each time. Since the displacement of the sidewall by excavation was already converged, laser scanning was not affected by the displacement of the sidewall. To receive the high density of point clouds, the resolution of the laser scanner was set as 2 mm at 10 m. The magnitude of measurement error provided by the manufacturer is adopted herein, which is 1.2 mm + 10 ppm over the full range [23]. In our scans, the objects (the SMW and the ring beam) were safely within the range of 40 m from the scanner. Thus, the distance measurement error of a single point is within 1.6 mm. Moreover, the measurement error can be further reduced by averaging the position of hundreds of neighbouring points during analysis due to the high spatial resolution. The excavation was performed for about two months after the SMW construction. Eight scans were performed during the excavation to analyze the displacement in this paper. Table 2 shows the date and construction stages during eight scans
2.2 Registration of point clouds
The eight scanned point clouds are expressed in different coordinates. These scans have to be expressed in one coordinate using reference target registration to analyze the displacement. The scans of the SMW and the ring beam are aligned differently in orientation and position due to the mismatch of the underlying coordinate system, as shown in Fig. 2a. Therefore, to compare the point clouds created by multiple scans, all point clouds from multiple scans need to be aligned into one consistent coordinate system by matching the positions of corresponding targets 1, 2, and 3, and all eight scans are aligned. This registration process was performed using software called Cyclone (Geosystems, 2015), and Fig. 2b shows a point cloud with registration completed. The average target registration error in this study is 0.001 m, and the maximum value is 0.004 m. The magnitude of the mean target registration error is smaller than that in other researches [24,25,26]. The values of mean target registration error are summarized in Table 3. The larger mean target registration error values mainly resulted from the lower target acquisition accuracy of scanners and larger scanning distance. However, registration error is not uniformly distributed in space. The target registration error does not equal the registration error at the observed retaining structures. To physically measure and explicitly quantify the value and direction of distribution of registration error is not practical because it would require a more advanced measurement technique of higher spatial resolution and accuracy than laser scanning. If that requirement could be met, we would reduce the registration error further using that more advanced measurement technique instead of laser scanning. To estimate the magnitude and the variation of registration error in space, Fan et al. [27] proposed empirical equations for expected registration error, \(m\left(\left|\mathrm{ORE}\right|\right)\), in Eq. (1) based on statistical test and numerical simulation. Scan A and B are two arbitrary scans registered to each other:
where \({\sigma }_{A}\) is target measurement error for scan A, \({\sigma }_{B}\) is target measurement error for scan B, n is the number of reference targets used, \({D}_{h}\) is the distance between the centre of mass of targets and the laser scanner, \({S}_{h}=\sqrt{\frac{1}{n}\sum_{i=1}^{n}{S}_{hi}^{2}}\), \({S}_{hi}\) is the distance between \(i\mathrm{th}\) target and the centre of mass of targets.

Registration of point clouds
According to the configuration of reference targets in this research, n = 3 and \({S}_{h}=\) 2.6 m. The target measurement error is 2 mm standard deviation at 50 m, according to the manufacturer [23]. In this research, the targets are measurement at around 20 m distance. With a smaller distance between reference targets and laser scanners, the target measurement error should be smaller than 2 mm. Therefore, \({\sigma }_{A}\) and \({\sigma }_{B}\) are all set to 1 mm, which is the value of the aforementioned mean target registration error. The expected magnitude of registration error can be calculated according to its value of \({D}_{h}\). The results are shown in Fig. 3. Figure 3a shows that the maximum of expected object registration errors of the whole scene is 3.55 mm. Figure 3b shows that the maximum of expected object registration errors of the retaining structures is 1.71 mm. The object registration error consists of errors generated in both translation and rotation of point clouds in the registration process. Where, the \({D}_{h}\) is equal to 0 and the \(m\left(\left|\mathrm{ORE}\right|\right)\) is 1.0 mm. That is the translational components of mean object registration error. The translational components are independent of the location of points and are uniform in the whole scene of a scan.

Distribution of registration errors in space
3 Point cloud comparison method
3.1 Point comparison methods for estimation of the distance between point clouds
There are mainly three different approaches to the calculation of distance between a pair of point clouds: Cloud to Cloud (C2C), Cloud to Mesh (C2M), and Multi-scale Model to Model Cloud Comparison (M3C2). The schematic diagram for the C2C method is shown in Fig. 4a. One of the paired point clouds is defined as the compared point cloud and another as the reference point cloud. Principally, for any point in the compared cloud, the C2C algorithm finds its closest point in the reference cloud. After repeating such distance calculation for each point in the compared cloud, the distance between these two clouds is determined as the mean value of the computed distance of each point in the compared cloud. Therefore, the C2C method is most affected by the density of the point cloud among the three comparison methods. A point cloud is meshed for comparing with another point cloud as a reference with the least-square best-fitting plane principle in the C2M method (see Fig. 4b). The distance between the generated meshes and each point of the compared cloud is calculated, and the mean distance can be calculated. Therefore, an error caused by the discontinuity between points in the C2C method can be minimized in C2M method. However, when the displacement of the structure is not moved to the normal direction to the plane of the structure, the estimated distance is over or underestimated in the C2M method. To minimize this effect, it is necessary to analyze the shape of the structure and the direction of displacement locally. In the M3C2 method, the core points are sub-sampled from the compared cloud according to a core point resolution set to the minimum distance between two core points. For any given core point i, the surface normal for each core point is estimated by fitting a plane to all points in the original compared cloud within \({D}_{n}\)/2 distance of core point i. Then, a cylinder of radius \({D}_{d}\)/2 is defined in a way that the axis of the cylinder is in the estimated normal direction and goes through core point i (see Fig. 4c). The depth of the cylinder should be optimized to include the value of the expected displacement but not to include points that are not subject to comparison. All points in the compared cloud encompassed by the cylinder are projected to the axis, and the mean position of projections is obtained. Similarly, all points in the reference cloud encompassed by the cylinder are projected to the axis, and the mean position of projections is obtained. Finally, the distance between the pair of mean positions of projections is computed. The distance between these two clouds is determined as the mean value of the computed distance of each core point in the compared cloud.

Schematic diagram of point clouds distance estimation methods
In this paper, laser scanning was performed to evaluate the behavior of SMW and ring beam. The ring beam is a concrete structure, so the surface is flat, as shown in Fig. 5a. Nevertheless, SMW is the soil and concrete mixture and shows a rough surface (see Fig. 5d). Therefore, to find an appropriate point cloud distance calculation method for retaining structure, the performance of C2C, C2M, and M3C2 was evaluated. To evaluate the performance of the three comparison methods, two point clouds were randomly extracted and rearranged from one selected point cloud. A rearranged point cloud was artificially moved to calculate the distance from another point cloud by three comparison methods. Therefore, the distance between a pair of point clouds is pre-knowledge. The point cloud obtained by scanning the surface of the ring beam is shown in Fig. 5b. The point cloud is uniformly distributed due to the flat surface of the ring beam. After the point cloud of the ring beam is randomly reoriented in the horizontal x–y plane, two half-resolution sub-samples are randomly extracted from the point cloud of the ring beam. One of the extracted samples is shifted from the other three extracted samples in the positive direction of the z-axis by 0, 0.001, and 0.01 m, respectively (see Fig. 5c), and the distance can be evaluated by applying C2C, C2M, and M3C2 methods, respectively. The calculation parameters for M3C2 are \({D}_{\mathrm{c}}\) = 0.1 m, \({D}_{\mathrm{n}}\) = 0.1 and d = 0.1 m. These two sub-sampled point clouds are identical in terms of macroscopic geometrical characteristics, including mean centroid position, dimension, and roughness. However, they are different only in the distribution of individual points. Two point clouds can be created by scanning the same object twice. However, other errors such as measurement and registration errors are reflected in this case. Therefore, the distance between the two point clouds is analyzed by sub-sampling. Only the errors due to analysis can be considered. The point cloud obtained by scanning the SMW is shown in Fig. 5e, and the point cloud of the SMW mixed with the soil and grouting is rough and rippled. Since the rough and protruding surfaces prevent laser scanners from acquiring continuous and regular point clouds, the point clouds of the SMW are distributed unevenly compared to the ring beam. By adopting a random sub-sampling method, two point clouds of the SMW surface can be generated and then shifted 0, 0.001, and 0.01 m along the z-axis, as shown in Fig. 5f. The calculated displacements of each method are compared to the true displacements.

Sub-sampling and shifting of point clouds for performance analysis
As shown in Fig. 6, 100 samples were randomly extracted from the original point cloud of the ring beam and the SMW and shifted from a point cloud which is not shifted for the estimation of displacement. Figure 6 shows the result of comparing the distance calculated by the C2C, C2M, and M3C2 method with the shifted distance for the point clouds of the ring beam and of SMW. The maximum error in the C2C method was about 0.9 mm in the ring beam and 4.4 mm in SMW, respectively. The errors decrease with the increase of the true distance. The reason is that the C2C method is more affected by the resolution of the point clouds than the other comparison methods, as explained in Fig. 4a. Since the distances of points between two point clouds are directly compared in the C2C method, the error that occurs without shifting the point cloud is caused by points (see Fig. 6a). The error caused by the discontinuity between the points is more significant when the ground truth distance is relatively small. Figure 6b shows the error of C2M and M3C2 methods in the displacement analyses of the ring beam and the SMW. The error is increased in both methods with increases of shifted distances.

Analysis errors of C2C, C2M, and M3C2
In the ring beam, the maximum errors are 0.022, 0.029, and 0.21 mm in the C2M method when the 100 sampled point clouds are moved by 0, 1, or 10 mm. The maximum errors were 0.015, 0.015, and 0.017 mm in the M3C2 method when the 100 sampled point clouds are moved by 0, 1, or 10 mm. Since the ring beam has a flat surface, the error was less than 1 mm in both comparison methods. In the SMW, the maximum error was 1.60 mm in C2M and 1.01 mm in M3C2, respectively. Therefore, the C2C method is not applied in this paper because the error in SMW cases is almost ten times larger than that of the two comparison methods when the true distance is 0 and 1 mm. The M3C2 method is not applied in this paper because different input parameters have to be estimated according to each local area due to roughness changes of the SMW. The error of the C2M method is slightly larger than the M3C2 method. However, the entire section of the retaining wall can be analyzed without parameter estimation. Therefore, the displacement of the retaining wall structure is estimated by the C2M method.
4 Preliminary results of displacement calculation
4.1 Displacement analysis of ring beam
In this paper, an increase of displacement due to excavation was evaluated by the C2M method. The surface of the ring beam closest to the target of the total station was segmented as shown in Fig. 7a to compare with the total station result. All the point clouds of sequential scans are compared to the mesh of the reference cloud to calculate the displacement. Figure 7b shows the displacement of the ring beam measured by the laser scanner and the total station. The negative means displacement towards the excavation, and positive means displacement away from the excavation. The excavation started at the center of the site and reached the retaining wall. The area around the retaining wall began to be excavated after 30 days. Therefore, the displacement is stable before 30 days, but it is increased after 30 days. The displacement between the before and after the excavation (day 20 and day 55) in laser scanning data is about 6 mm. Compared to the total station result, the global trend is generally matched with the total station measurement. However, the difference between these two results is varied from 0.69 to 2.46 mm. The gross error of laser scanning result is a combination of measurement, registration, and data analysis error. The measurement errors in individual points are normally distributed and are almost neutralized in data analysis. As discussed in Sect. 3.1, the resultant mean data analysis error on ring beam point clouds is merely 0.2 mm. Referring to the analysis of registration error in Sect. 2.2, at the location of the segmented point cloud in Fig. 7a, the expected registration error is 1.5 mm. The half-length of the error bars of point cloud results in Fig. 7b is 1.7 mm, which is the sum of expected registration error and mean data analysis error. It can be seen that the difference between total station and point cloud results are all within the range of error bars except for days 5 and 55. Note that the total station measurement also includes at most 1 mm of error. The difference between total station results and laser scanning results is smaller than the sum of their respective errors.

Displacement with time in ring beam
The magnitude of the error bar is the sum of expected registration error and data analysis error. The expected registration error accounts for 88% of the magnitude of the error bar. In real-case applications, increase of the number of reference targets, setting the mean position of reference targets closer to the observed structure, and better accuracy of reference target measurement can further reduce the expected registration error. The magnitude of data analysis error could also be potentially reduced if alternative data analysis methods with improved accuracy were proposed in the future. The shape of histogram of data analysis error (corresponding to C2M_Ring Beam in Fig. 6b) are shown as light blue bars in Fig. 8. 60 common probability density functions are fitted to the histogram. However, all the fits show low Kolmogorov–Smirnov, which means low goodness of fit. The example of a fitted alpha probability density function is shown as the red curve in Fig. 8. As mentioned in Sect. 2.2, the magnitude of the expected registration error is given following the empirical Eq. (1) proposed by Fan et al. [27]. In the research of Fan et al. [27], the probability density function of the expected registration error is not given in the explicit mathematical form.

The shape of histogram and fitted probability density to data analysis error
Since the ring beam is constructed in the horizontal direction with a length of about 30 m, a bending moment can occur due to excavation. Therefore, to evaluate the ring beam’s behavior before and after excavation, the displacement was calculated by the C2M method from the segmented 12 sections of the ring beam (see Fig. 9a). Monitoring data before excavation (day 20) and data after excavation (day 55) were compared with the data at the start of monitoring (day 0), as shown in Fig. 9b. The range of the error bar is the sum of object registration error and data analysis error. Since excavation from the center of the site to the retaining wall, displacement of about 3.6 mm from the center of the retaining wall occurred even before excavation around the retaining wall, and displacement of about 1 mm at both ends. After the excavation was completed, the maximum displacement occurred at 9.1 mm at the center of the retaining wall, and the displacements at both north and south ends were about 3.8 and 3.5 mm, respectively. A slab is built near the north end of the retaining wall to constrain the displacement of the retaining wall. In addition, at the south end of the retaining wall, the retaining wall located in the south restricts the displacement of the retaining wall, thereby minimizing displacement. The difference between displacements of both ends of the retaining wall and the center is approximately 5.5 mm, creating a bending moment. If SMWs, cylindrical-shaped mixtures of concrete and soils, did not properly overlap in construction, cracks and fractures can occur between SMWs. The displacement of the 12 sections is gently changed, and hence the bending moment acts. However, the failure between SMWs is not generated.

Calculation of displacement profile in the ring beam
In Fig. 9b, the range of error bars is relatively larger compared to the values of displacement, especially at data points towards the North end, making it hard to distinguish the relative trend of the displacement profile. As shown in Fig. 9c, by setting the displacement at 22 m zero, the translational component of object registration error can be excluded from the relative displacement profile by setting the remaining error is less than 0.71 mm. Therefore, analyzing the relative displacement within the point cloud from a single scan also evaluates behaviours of structure such as bending.
4.2 Displacement analysis of SMW
The point cloud comparison in SMW is affected by the rough surface of a mixture of concrete and soil. It was confirmed that the most significant displacement occurred at the center of the retaining wall in the analysis of the ring beam. Therefore, in this paper, the vertical displacement analysis was performed by segmenting the point cloud of the ring beam and SMW located at the center of the retaining wall, as shown in Fig. 10a. The displacement profile across the depth is calculated using C2M (see Fig. 10b). The displacement after excavation (55 days) was uniform across the depth, except for the data points at depths 1.45 and 3.45 m. Comparing the displacements between before and after excavation, the maximum displacement difference was 5.9 mm at the top of the ring beam. The minimum displacement difference was 4.0 mm at 2.65 m. But it is found that the retaining wall was uniformly moved in the horizontal direction during the excavation, and the average displacement is about 5.0 mm. It means that the ring beam and SMW move horizontally toward the excavation as a rigid body without bending or tilting. Therefore, a large bending moment can occur at the bottom of the SMW at the excavation boundary.

Calculation of displacement profile in SMW
4.3 Soil collapsing effect in SMW
As shown in Fig. 10b, the displacement result of SMW shows that the data points at depths 1.45 and 3.45 m are abnormal. Since the top of the SMW is located at the boundary with the ring beam, it is difficult to excavate the ground from the surface of the SMW completely. Soil that is not completely excavated can fall off the SMW over time. The ground collapsing phenomenon affects the result of laser scanning of the excavated surface. Figure 11 shows the retaining wall of monitoring day 55. It can be seen that unexcavated soil still remains on the boundary of the ring beam and the SMW. This soil can collapse over time due to various influences such as construction activity and heavy rain. The collapsed soil is deposited on the bottom of the SMW. Although the collapse of soil is not related to the stability of the SMW, it has a great influence on the analysis of the laser scanning results, as shown in Fig. 10b.

Change of soil surface
To find out the effect of the soil collapse in the result of the displacement analysis, the distribution of the points was determined by comparing the point clouds before and after excavation while changing the collapsed area. Figures 10c, 11b, and 12a, show the point cloud areas with 6, 24, and 96% collapsed areas compared to the analyzed area. The effect of the increase of the collapsed area on the displacement calculation result was determined. Figure 12d shows the distribution of the displacement results of the points for each case. Figure 12d shows the distribution of points corresponding to the displacement calculated by C2M method. Since the number of points corresponding to each displacement is normalized by dividing from the total number of points, three cases can be compared in a graph. Suppose the collapse area is 6% of the analysis area. In that case, the distance due to the displacement is dominant so that the displacement can be calculated by the mean distance. However, if the collapsed area is 24% of the analyzed area, the difference between the points representing displacement is still dominant. But due to the influence of the collapsed area, the average displacement is underestimated. When the collapsed area increased to 96% of the analyzed area, the results are not reflected the true displacement because the distance between the two point clouds caused by soil collapse is dominant. Therefore, it is necessary to devise an efficient method to remove the effects of soil collapse.

Effect of soil collapse to estimate displacement
5 CANUPO machine learning algorithm to remove soil collapsing effect
In this paper, after obtaining the three-dimensional point cloud of the SMW at each excavation stage using laser scanning, the displacement was calculated by the C2M method. Nevertheless, the displacement analysis was not appropriately estimated at certain locations where the soil was collapsed on the SMW. Therefore, the CANUPO machine learning algorithm is proposed as an effective method to separate the true displacement and the errors caused by the collapse of the ground.
5.1 Observation of surface soil deformation on SMW
In the existing coordinate system to express the point cloud, the features of displacements can be divided into three types: the distance calculated by true displacement (\({D}_{\mathrm{T}}\)), the distance in the collapsed area, and the distance in the deposited area. The displacements of collapsed area and the deposited area are either over or underestimated compared to the true displacement. Therefore, the true displacement can be distinguished from displacements generated by these two cases using the CANUPO machine learning classifier. It is necessary to represent the point cloud of the existing SMW into a new coordinate system to clarify the features of the three areas before applying the CANUPO machine learning method (see Fig. 13a). Three-dimensional point cloud data representing the SMW of the last scan (Cloud A) and baseline scan (1st scan and 2nd scan in Fig. 13a) are segmented and aligned in such a way that the point clouds of SMW are projected on the \({X}_{A}\)−\({\mathrm{Z}}_{A}\) plane, and the \({\mathrm{Z}}_{A}\)-axis is in the vertical direction. The \({\mathrm{Y}}_{A}\)-axis represents the majority of true displacement. In the new \({X}_{B}\)−\({\mathrm{Y}}_{B}\)−\({\mathrm{Z}}_{B}\), \({Y}_{B}\)-axis can be determined by the calculated distance between these two scans using C2M method (\({D}_{A})\). An artificial point cloud (Cloud B) is represented by corresponding points \({(X}_{B}={X}_{A}, {Y}_{B}={D}_{\mathrm{A}}, {Z}_{B}={Z}_{A})\) in the new coordinate system is created.

Creation of artificial point cloud (Cloud B)
An artificial Cloud B is created as a medium to detect the point cloud representing the collapsed and deposited soils. A top view of the original point cloud (Fig. 13b) and an artificial Point cloud B (Fig. 13c) are presented. The Point cloud B represents how different is 2nd scan to the 1st scan, and two distinct components can be intuitively identified in Point cloud B. For those zones where the soil surface remained relatively intact, \({Y}_{n}={D}_{m}\) is uniform, which corresponds to the flat and thin parts in Cloud B. For those zones where the soil surface was disturbed, \({Y}_{n}={D}_{m}\) varied in a wavy way, which corresponds to those bumpy parts in Cloud B. Conceptually, the flat parts are almost two-dimensional, and the bumpy parts are rather three-dimensional. Then, it is decided to adopt a method to separate Cloud B into bumpy parts and flat parts based on its local dimensionality.
5.2 CANUPO machine learning algorithm
The CANUPO [22] method, a machine-learning algorithm to classify three-dimensional point cloud based on the dimensionality in the vicinity of points on multiple scales, is selected for automated classification of Point cloud B. For each point of a given point cloud, the Principle component analysis (PCA) is performed on all points in the enclosed vicinity defined by a sphere of a given scale. Then the PCA analysis yield a set of Eigenvalues, \({\lambda }_{1}\), \({\lambda }_{2}\), and \({\lambda }_{3}\)(values of them in descending order). The proportions of each Eigenvalue to the sum of the set of Eigenvalues, \({p}_{1}= {\lambda }_{1}/{(\lambda }_{1}+{\lambda }_{2}+{\lambda }_{3})\),\({p}_{2}= {\lambda }_{2}/{(\lambda }_{1}+{\lambda }_{2}+{\lambda }_{3})\), and \({p}_{3}= {\lambda }_{3}/{(\lambda }_{1}+{\lambda }_{2}+{\lambda }_{3})\), represent the dimensionality of the point cloud enclosed in the sphere. For an ideal 1D case, \({p}_{1}=1\) and \({p}_{2}={p}_{3}=0\). For an ideal 2D case, \({p}_{1}={p}_{2}=1/2\) and \({p}_{3}=0\). For an ideal 3D case, \({p}_{1}={p}_{2}={p}_{3}=\frac{1}{3}\). Given the value of \({p}_{1}\) and \({p}_{2}\), the value of \({p}_{3}\) is determined and hence it is not necessary to incorporate \({p}_{3}\). The PCA analysis is repeated at \({N}_{s}\) scales to yield \({N}_{s}\) pairs of \({p}_{1}\) and \({p}_{2}\). Thus, a feature vector of dimension \({2N}_{s}\) is constructed as \({(p}_{\mathrm{1,1}},{p}_{\mathrm{2,1}, }{p}_{\mathrm{2,1}},{p}_{\mathrm{2,2}},\dots ,{p}_{{N}_{s,},1},{p}_{{N}_{s},2})\).
The classifier needs to be constructed in a feature space of dimension \({2N}_{s}\) to yield maximal separability of two groups of training data. The classifier is defined in two steps: (a) projection of training data in a plane of maximal separability; and (b) separation of data in that plane. The \({2N}_{s}\)-dimensional feature space can be represented as Eq. (2):
It can be considered as a hyperplane, best separate two classes in feature space F. Two hyperplanes are defined by following equations:
where w is a weight vector, and b is a bias. The Pegasus approach [28, 29] is used to solve w, and b is solved using the approach described by [30]. Such a process is repeated to define the second-best hyperplane orthogonal to the first.
The distances from each point in feature space (F) to those two hyperplanes can be calculated as \({d}_{1}={w}_{1}^{\mathrm{T}}X-{b}_{1}\) and \({d}_{2}={w}_{2}^{\mathrm{T}}X-{b}_{2}\). The plane of maximal separability is then defined using \(({d}_{1},{d}_{2})\) as horizontal and vertical coordinates. The projection of training data on the plane of maximal separability is shown in [13]. The classification boundary to separate the two classes in the plane of maximal separability is defined using the Support Vector Machine (SVM) classifier [31]. Blue points classified by SVM represent Flat surfaces, and red points are Bumpy surfaces. The pink line is the classification boundary.
5.3 Classification of SMW point cloud using CANUPO method
Some points in Cloud B are in the form of 2D (Flat) and some in the form of 3D (Bumpy) as shown in Figs. 14b and 15a. The training dataset is manually segmented from Cloud B and labelled for Class Bumpy and Class Flat. There are 10,000 points for each class. The total number of points in the training dataset accounts for 7.3% of the total number of points in Cloud B (272,196). The combination of 11 scales (0.5, 0.6, 0.7, 0.8, 0.9, 1, 1.1, 1.2, 1.3, 1.4, and 1.5 m) is chosen for the PCA. The feature vector is 22-dimensional and incorporates 11 pairs of \({p}_{1}\) and \({p}_{2}\) at those 11 scales. The training accuracies evaluated by the SVM classifier are 99.72% in Flat Class and 98.44% in Bumpy Class. Then all data points of Cloud B are classified using the trained classifier. The results after classification are shown in Figs. 14d and 15c. The group of Bumpy, consisting 97,297 points, is marked in red and the group of Flat, consisting 174,899 points, in blue. After classification, the group of Bumpy is deleted, and the group of Flat remained. The remaining parts of Cloud B are converted back to the corresponding points in Point cloud A by making \({Y}_{n}={Y}_{m}\). This point cloud is used to calculate the displacement. The process of obtaining the revised point cloud after removing the deformed area is summarized in the flow chart in Fig. 16.

Classification between flat and bumpy classes by SVM classifier

Classification between bumpy and flat classes by SVM classifier

CANUPO machine learning process for re-estimation of displacement
5.4 Re-estimation of displacement profile of SMW
To determine the reliability of the CANOPU machine learning algorithm proposed in this paper, the result of applying the CANOPU machine learning algorithm and was compared to the original result without applying the CANOPU machine learning algorithm by selecting the disturbed area of the soil surface of SMW. As indicated by (a), (b), (c), (d), and (e) in Fig. 15d, six sections of the SMW having different proportions of disturbed soil are sampled. The height and width of each rectangular section are 2 and 0.5 m, respectively. Each section is subdivided into 10 subsections of 0.2 m high and 0.5 m wide to calculate the C2M distance from the baseline in all subsections. The displacement profile is obtained along with the height of SMW for each section. The results are shown in Figs. 16b–e and 17a correspond to sections (a), (b), (c), (d), and (e) in Fig. 15d sequentially. The percentages of deleted points in sections (a), (b), (c), (d), and (e) are 0, 25, 34, 52, and 79% sequentially.

Re-estimation of displacement in SMW
Figure 17a shows the result of a case that there is no soil collapse effect. None of the points is segmented by the CANUPO. Hence, both the original displacement and the displacement after applying the CANUPO method are the same and show uniform displacement variation along with the depth of SMW. For section (b), at depth from 2.1 to 2.3 m and depth from 2.7 to 3.5 m, there is the removal of surface soil, and the CANUPO method can identify the majority of that at depth from 2.1 to 2.3 m but only partially at depth from 2.7 to 3.5 m. For section (c), the displacement profile is successfully rectified at a depth of 1.7–2.1 m and 3.1–3.3 m. The overestimated displacements of both section (b) and (c) were re-estimated so that the displacement profile is more uniform with the depth of the SMW than the original displacement (see Figs. 16c, 17b). For section (d), areas at depth from 1.5 to 1.7 m and from 2 to 2.8 m are removed. But it is found that all points at depth from 1.5 to 1.7 m are removed due to soil collapse so that there is no data for the comparison of the point cloud. From 2 to 2.8 m, only the affected parts are segmented and intact parts remain, so the error that occurred in the calculation using the original point cloud are re-evaluated in the point cloud after segmentation (see Fig. 17d). There was large collapsing on areas below depth 2.5 m in Sect. 6, which is correctly removed using the CANUPO method. Therefore, all points below depth 2.5 m in Sect. 6 are removed, and no corresponding displacement profile is available. Nevertheless, the displacement profile between 1.8 and 2.5 m is re-evaluated using remained point cloud.
It can be inferred that the displacement profile re-estimated by the CANUPO machine learning algorithm is more reasonable than that calculated from the original cloud. Generally, the acute variation of displacement along the depth of SMW is revised into a gradual change in all cases. It is appropriate because the SMW is structurally continuous in the depth direction. Because laser scanning continuously scans over time, it is constantly affected by the construction environment. It is necessary to minimize these effects. In this paper, it is found that the errors caused by the ground collapsing effect can be removed by the CANUPO machine learning algorithm. Therefore, the proposed method can calculate the pure displacement by removing the deformation.
Figure 18 shows the average displacement profile of 6-m-wide vertical columns SMW over depth after removing the soil collapse area. The x-values in the legend represent the horizontal distance between the center of each vertical column and the North end of SMW. Though individual data point still varies with error caused by the roughness of SMW, the global trend is clear. Horizontally the displacement is maximum at the center of SMW, similar to the trend observed for ring beam displacement (Fig. 9). Vertically, the displacement decreases with the increase in depth, which indicates the rotation movement of the SMW along a horizontal axis.

Displacement profile after removing soil collapse area
6 Conclusions
In this paper, terrestrial laser scanning was used to monitor a 30 m long retaining wall structure composed of a ring beam and SMW during excavation. Although the estimation of displacement was disturbed by the collapse of the ground on the surface of the SMW, the displacement of the SMW was able to be calculated by removing the point clouds affected by the collapse of the ground with the CANUPO machine learning algorithm.
The multi-temporal point clouds are registered based on the reference target, and the maximum value of the expected registration error of the retaining structures is 1.71 mm. The C2M method is chosen to estimate displacement between multi-temporal point clouds because it can be applied without estimating input parameters. The displacement estimation error is 0.2 mm for the ring beam and 1.6 mm for SMW. Measurements by total station and laser scanning at the center of the ring beam are compared at multiple dates. The difference in displacement result is always smaller than the sum of the expected errors of these two measurements. This shows that the application of laser scanning is feasible in this research.
The displacement profile of the beam ring beam, along its longitudinal direction, is estimated. The center of the ring beam displaces approximately 5 mm more than both ends of the ring beam because adjacent retaining structures support both ends of the ring beam in the transverse direction of the ring beam. The difference between displacements of both ends of the retaining wall and the center can create a bending moment.
The displacement analysis of the SMW was affected by soil collapse and deposition on the SMW surface. Therefore, the CANUPO machine learning algorithm was applied to identify and remove the point clouds representing areas with soil collapse. Therefore, the proposed method can calculate the pure displacement by removing the deformation. Vertically, the displacement of SMW decreases from top to bottom. This trend shows the rotational movement of the SMW along a horizontal axis.
References
Mohamad H et al (2012) Monitoring twin tunnel interaction using distributed optical fiber strain measurements. J Geotech Geoenviron Eng 138(8):957–967
Bremer M, Sass O (2012) Combining airborne and terrestrial laser scanning for quantifying erosion and deposition by a debris flow event. Geomorphology 138(1):49–60
O’Neal MA, Pizzuto JE (2011) The rates and spatial patterns of annual riverbank erosion revealed through terrestrial laser-scanner surveys of the South River, Virginia. Earth Surf Proc Land 36(5):695–701
Lague D, Brodu N, Leroux J (2013) Accurate 3D comparison of complex topography with terrestrial laser scanner: application to the Rangitikei canyon (N-Z). ISPRS J Photogramm Remote Sens 82:10–26
Nguyen H et al (2011) Use of terrestrial laser scanning for engineering geological applications on volcanic rock slopes—an example from Madeira island (Portugal). Nat Hazard 11:807–817
Crespo-Peremarch P et al (2018) Characterizing understory vegetation in Mediterranean forests using full-waveform airborne laser scanning data. Remote Sens Environ 217:400–413
Suchocki C, Katzer J (2018) Terrestrial laser scanning harnessed for moisture detection in building materials—problems and limitations. Autom Constr 94:127–134
Pesci A, Casula G, Boschi E (2011) Laser scanning the Garisenda and Asinelli towers in Bologna (Italy): Detailed deformation patterns of two ancient leaning buildings. J Cult Herit 12(2):117–127
Lee M et al (2015) Finding the displacement of wood structure in heritage building by 3D laser scanner. ISPRS Ann Photogramm Remote Sens Spatial Inf Sci 2:165–169
Jaafar HA (2017) Detection and localisation of structural deformations using terrestrial laser scanning and generalised procrustes analysis. University of Nottingham, Nottingham
Ochałek A, Jaśkowski W, Lipecki T (2018) Analysis of convergence and deformation measurements based on classical geodetic surveys and terrestrial laser scanning in "Wieliczka" salt mine. In: International multidisciplinary Scientific GeoConference: SGEM, vol 18, no 2.2, pp 583–590
Chu X et al (2018) Monitoring of long-span bridge deformation based on 3D laser scanning. Instrum Mesure Metrologie 17(1):113
Xu X, Yang H, Neumann I (2018) Deformation monitoring of typical composite structures based on terrestrial laser scanning technology. Compos Struct 202:77–81
Oskouie P, Becerik-Gerber B, Soibelman L (2016) Automated measurement of highway retaining wall displacements using terrestrial laser scanners. Autom Constr 65:86–101
Seo H (2021) Long-term monitoring of zigzag-shaped concrete panel in retaining structure using laser scanning and analysis of influencing factors. Optics Lasers Eng 139:106498
Seo H (2021) Tilt mapping for zigzag-shaped concrete panel in retaining structure using terrestrial laser scanning. J Civ Struct Health Monit 11:851–865
Lindenbergh R et al (2009) Structural monitoring of tunnels using terrestrial laser scanning. Rep Geod, Warsaw University of Technology, Warsaw, Poland, pp 231–238
Acikgoz S, Soga K, Woodhams J (2017) Evaluation of the response of a vaulted masonry structure to differential settlements using point cloud data and limit analyses. Constr Build Mater 150:916–931
Guldur B, Hajjar JF (2014) Laser-based structural sensing and surface damage detection. Northeastern University, Boston
Vorobyev A et al (2018) Evaluation of displacements by means of 3D laser scanning in a mechanically loaded replica of a hull section of the Vasa ship. Digit Appl Archaeol Cult Herit 11:e00085
Gikas V (2012) Three-dimensional laser scanning for geometry documentation and construction management of highway tunnels during excavation. Sensors 12(8):11249–11270. https://doi.org/10.3390/s120811249
Brodu N, Lague D (2012) 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: applications in geomorphology. ISPRS J Photogramm Remote Sens 68:121–134
Geosystems L (2017) Leica scanstation P30/P40 product specifications. Heerbrugg, Wetzlar, Germany
Petley DN et al (2005) Terrestrial laser scanning for monitoring the process of hard rock coastal cliff erosion. Q J Eng Geol Hydrogeol 38(4):363–375
Olsen MJ et al (2009) Terrestrial laser scanning of extended cliff sections in dynamic environments: parameter analysis. J Surv Eng 135:161–169
Schürch P et al (2011) Detection of surface change in complex topography using terrestrial laser scanning: application to the Illgraben debris-flow channel. Earth Surf Proc Land 36(14):1847–1859
Fan L et al (2015) Error in target-based georeferencing and registration in terrestrial laser scanning. Comput Geosci 83:54–64
Shalev-Shwartz S et al (2011) Pegasos: primal estimated sub-gradient solver for SVM. Math Program 127(1):3–30
King DE (2009) Dlib-ml: a machine learning toolkit. J Mach Learn Res 10:1755–1758
Platt J (2000) Probabilistic outputs for support vector machines and comparisons to regularized likelihood methods. Adv Large Margin Classif 10:1–11
Boser BE, Guyon IM, Vapnik VN (1992) A training algorithm for optimal margin classifiers. In: Proceedings of the fifth annual workshop on computational learning theory. Association for Computing Machinery, Pittsburgh, pp 144–152
Acknowledgements
The authors are grateful to Suzhou Zhonagyan Survey Company and Nantong Forth Construction Company for their assistance onsite. The research of this paper was carried out with the support of Research England Participatory Research Fund, and authors would like to thank all people involved in this project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhao, Y., Seo, H. & Chen, C. Displacement analysis of point cloud removed ground collapse effect in SMW by CANUPO machine learning algorithm. J Civil Struct Health Monit 12, 447–463 (2022). https://doi.org/10.1007/s13349-022-00555-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13349-022-00555-7