
Abstract
It is acknowledged that many of the problems related to urban congestion can be solved through the diffusion of automated vehicles capable not only of replacing drivers, but also of receiving information from the infrastructure. In this article, the effects of driverless cars (level 3–4 of automation) and of the Green Light Optimal Speed Advisory (GLOSA) system, a particular kind of Cooperative – Intelligent Transport System (C-ITS), will be evaluated at an urban signalized intersection through a set of micro-simulations. The aim of the paper is to analyze the two system as stand-alone before evaluating their jointed implementation, so to obtain their impacts and to analyze if and how they synergize for different levels of market penetration. The results of these simulations demonstrate that automated and connected cars should bring global benefits at intersections and also result in a first set of recommendations and best practices for the implementation of the systems in the short-medium term. Particular focus is given to the interaction between the equipped vehicles and traditional traffic, to frame the negative effects on the overall crossing both in Traffic Efficiency and Environment. Finally, the evaluation of a real crossing in Milan is performed and the results of the overall node are provided for different scenarios and time horizon.
Similar content being viewed by others

Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
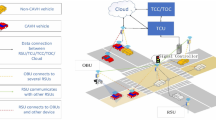
Automated vehicles (AV) and Cooperative – Intelligent Transport Systems (C-ITS) are able both to entrust the driving task to the vehicle itself and to broadcast and receive information in real time, as pointed out by Qu et al. [1]. The vehicles can exchange information with both the infrastructure and other vehicles: these types of communication are usually referred to as Vehicle To Infrastructure (V2I) and Vehicle To Vehicle (V2V). These systems are the core of future mobility, but their actual impact on overall traffic flow, especially in the short term, has yet to be fully assessed. The main problems seem to arise in the period of coexistence between traditional and connected/automated vehicles. According to the most acknowledged forecasts, in the next 40 or 50 years there will be a transition period between traditionally driven vehicles and those equipped both with cooperative and autonomous systems. As will be demonstrated in this paper, interferences could have a negative impact on the overall traffic flow that should be assessed before the large-scale implementation of these systems. Therefore, the real challenge faced by this paper is to assess the possible effects of this coexistence on different impact areas as defined by Studer et al. [2].
The identified research gap is analyzed considering an urban context with three different kinds of innovative driving systems:
-
Automated vehicles (level 3–4 of automation), for which an on-board software manages the longitudinal and the lateral control.
-
Cooperative—connected vehicles (CCV) that can receive real time information from the traffic light and adjust their speed based on the signal phase. This system is a simplified version of Green Light Optimal Speed Advisory (GLOSA), called Time To Green (TTG).
-
Connected and automated vehicles, the jointed implementation of CCVs and AVs.
The three types will be simulated with different levels of market penetration. The aim of the analysis is, in fact, to both enrich the current literature with an Italian (and urban) use case and to separate the impacts arising from automation and the ones bound to connectivity. In this way it highlights which are the possible benefits achievable in the short term (where connectivity rather than automation is going to be spread) and what are the ones that can be obtained in the long run. This paper highlights the research aspects that should interest public authorities and bodies the most, providing them with the tools to plan the system that would maximize the benefits at similar crossing, in different time horizons.
2 Literature Review
As mentioned in the previous Section, aim of this paper is to both study the impacts of a GLOSA system on a real crossing and highlight what are the benefits arising from automation rather than connectivity based on different market penetration. The GLOSA system is implemented through V2I to provide the vehicle with a suggested speed value to maximize the odds of arriving during the green phase at the traffic light. Moreover, the remaining red time is broadcasted to the vehicle to make the restart smoother. A simplified version of the GLOSA Use Case is the Time to Green one, through which only the suggested speed value to arrive during the green phase is broadcasted. In literature, many studies focus on the definition of different algorithms to drive the receiving vehicle through the crossing or on the impacts of connected and automated vehicles receiving details about the signal phases. For example, Nguyen et al. [3] analyzed through micro-simulation and field tests what the performances of the GLOSA system can be and tries to upscale these results to a generic urban area. The results give back a reduction of travel time, waiting time, CO2 emissions and fuel consumption both in simulations and in the real case scenario, with CO2 emission decreasing up to 10% with 100% penetration rate. The study focuses on a Vehicle-to-everything (V2X) use case, though, not analyzing how it can synergize with automated driving. The study by Jiang et al. [4] considers these aspects, with the aim of designing an algorithm dedicated to automated vehicles and able to minimize fuel consumption through one or more branches. The dedicated algorithm seems to grant increased benefits to the automated vehicles when compared to traditional ones. Moreover, still Jiang et al. [4] carried out the analysis on an eco-driving system based on V2X communication in an isolated intersection, simulating different levels of market penetration for CAVs. The system Jiang et al. designed, prioritized mobility rather than fuel efficiency. The results report benefits on fuel consumption ranging between around 2 and 58% and throughput benefits up to 10.8% based on the penetration rate and on the traffic flows. Another interesting result is the value of 40% of market penetration, beyond which the benefits almost flatten. Again, this study does not analyze connectivity and automation as separated features concurring to the benefits at the crossing. Another results worth reporting is that the benefits arise especially with high levels of traffic flows rather than in non-saturated conditions.
For Wan et al. in [5], fuel consumption is prioritized instead, and a speed advisory system is designed to lower fuel consumption and waiting times using connected vehicles. The results suggest that, while sacrificing some of the throughput through the crossing due to lower speeds, a reduction in fuel consumption up to 17% can be achieved.
On the other hand, Zhao et al. in [6] carried out an assessment similar to Jiang et al. in [4] focused only on connected vehicles. In this study, the authors tried to design an applicable control solution to minimize the fuel consumption without considering higher levels of automation. The assessment is performed in mixed-traffic conditions, so that the influence of equipped vehicles on the rest of the traffic can be derived. In the study of Zhao et al. [6], the connected vehicles improve the fuel consumption of the other vehicles in the network by imposing reduced speeds. It is interesting to see how in this study the mean speed and therefore the average traffic flow slightly decrease, while in other analyses, such as the one by Wan et al. in [5], there is a slight increase. In this paper, the fuel emission reduction ranges between around 4 and 14% on the single connected vehicle and are equal to 14% for automated vehicles (performing the best acceleration trend while approaching the signal).
Gajananan et al. in [7] studied the effects of GLOSA-equipped vehicles with two sets of experiments. In the first, only autonomous, computer-driven vehicles were simulated, with six different penetration rates (0%, 20%, 40%, 60%, 80% and 100%). In the second one, to simulate the human response to the GLOSA suggested speed, a driving simulator with a sample of 10 people was used. During the two experiments, the scenario was the same: a 2.8 km long road with three signalized intersections. The authors evaluated and compared stopping time (s), travel time (s), CO2 emissions (kg) and average speed (km/h). In the first experiment, there was a reduction of these parameters of up to 40.36%, 10.18%, 8% and 18.8% respectively. In the second one, the reduction reached 67.63%, 15.7%, 19.83% and 19.2%.
Katsaros et al. in [8] evaluated the impacts of GLOSA on fuel consumption and traffic efficiency. The two simulation scenarios are based on an urban location with two traffic. The first one involves only traditional vehicles, the second one involves GLOSA-equipped vehicles with different penetration rates. Results showed that the higher the penetration rate the greater the achievable benefits. The most interesting result was that non equipped-vehicles were influenced too by the presence of GLOSA-equipped ones: if the leading vehicle is equipped with GLOSA, it forces them to adapt their speeds. This study also demonstrated that it is possible to obtain a reduction of 80% in stop time (s) and 7% in fuel consumption (L/100 km) with 100% market penetration.
Sanchez et al. in [9] studied the impact on fuel consumption of a system similar to the GLOSA obtaining a reduction in fuel consumption equal to 30% with a penetration rate of 10%, Taliert et al. in [10] showed the effectiveness of GLOSA on the Environment impact area through the reduction of CO and NOx, result were up to 80% and 30% respectively and Bodenheimer et al. in [11] studied benefits and limits of the GLOSA system in a simulation environment, also reporting as a credible result a reduction in fuel consumption of 13%.
The overview presented above concerns mostly GLOSA solutions (see Appendix Fig. 15 for a summary) but, as mentioned, in this paper the automated scenario is evaluated too with the aim of defining what are the benefits that can be obtained through automation and what are the ones achievable through connected vehicles. Therefore, a review of automated solutions and how they are reproduced in micro-simulated software is needed.
Stanek et al. in [12] evaluated the traffic benefits of automated cars through simulations in VISSIM. In this study, some parameters have been calibrated to simulate the behavior of automated cars and strong improvements were obtained. The total network delay fell up to a 32% value (namely, from a maximum of 2.5 h with 0% of penetration rate to 1.7 h with 100% of penetration rate) and the network average speed increased.
Shi et al. in [13] studied the traffic effects of AV. They analyzed the adjustment of HCM formulas due to the introduction of automated vehicles. Each parameter was assessed in its influence and sensitivity to AV features such as reduced perception and reaction time, tight car-following headways, precise lane keeping, correct assessment of gaps, precise lane changing and familiarity with any route. Considering different penetration rates and two different sets of headway, the authors evaluated traffic volume, capacity, speed and density. Results indicate a reduction of traffic density up to 62% and, consequently, an improvement of capacity (Level of Service) and speed.
Aria et al. in [14] modelled a 3 km highway segment in VISSIM and a traffic composition including both light and heavy vehicles. They demonstrated that average density (veh/km/ln), average travel time (s) and average travel speed (km/h) may increase as the penetration rate of self-driving cars increases. They obtained a 4.14% maximum improvement in average speed during the peak hour and a maximum reduction of average density and average travel time of 8.09% and 9% respectively.
Wietolt et al. in [15] studied the effects of automated vehicles on traffic efficiency with a penetration rate of 100% using Bundes Autobahn SIMulator (BABSIM). They demonstrated that self-driving cars do not cause any phenomenon of traffic breakdown and increases the capacity due to a more fluid traffic flow. Still, the magnitude of the impacts strongly depends on the parameters assumed to simulate the behaviors of automated vehicles. However, until automated vehicles (level 3 or above, 2016 SAE International classification [16]) enter the market, there will not be a prototype system that can be calibrated and univocally simulated in analyses such as the one presented in this paper. Therefore, the adopted hypotheses and parameters must be explained in Sect. 3 before reporting the results. Assuming that there is no guarantee that CCVs and AV will merge into their clear synergy (mentioned for example in Studer et al. [17]) in the next decade, the authors considered it important to analyze the aspects described above separately before considering them jointly. To focus more on these items, the simulations are limited to a single intersection, but there are many studies on coordinated managed intersections that give very promising results in terms of traffic efficiency. Coordinated intersection management (CIM) is a system that allows each connected vehicle to negotiate the right-of-way with an intersection controller). In the study by Bashiri et al. [18] a reservation-based policy has been evaluated through a cost functions to derive optimal schedules for platoons of vehicles. According to this study, the Platoon-based Variance Minimization (PVM) method decrease the Delay per Vehicle from 43.26 s (with traffic light controlled intersection) to 6.56 s (as aggregated result) and Fuel Consumption per Vehicle from 84 to 77 ml to cross the intersection. Perronnet et al. [19], on the other hand, implemented Cooperative Vehicle-Actuator System (CVAS). This protocol, compared to a 2 and a 4 phases traffic light, results in a decrease of the average lost time: CVAS has a maximum of 22.6 s, 2 and 4 phases traffic light respectively 54.3 s and 56.4 s.
3 Driving Behaviors for Automated Vehicles and C-ITSs
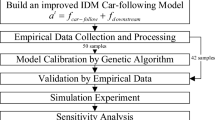
Simulations of Automated and Connected cars have been carried out using the micro–simulation software VISSIM, choosing some parameters of the embedded Wiedemann 74 driving model referring to the available literature. Wiedemann 74 is the model used by VISSIM to simulate the driving behavior in an urban context. It is characterized by five groups of parameters concerning: queuing, car following, lane changing, lateral behavior and traffic light system (see Appendix Fig. 16). The parameters all can vary from traditional vehicles, connected and/or automated ones. The selection of suitable parameters and behaviors is the result of an accurate bibliographic research and of some of the preliminary results of the C-Roads Italy Project ([2, 20]). The parameters used as input within VISSIM for traditional driving and automated vehicles can be found in literature ([12, 14, 21]). Some traditional behavioral parameters are different from automated, as can be found in Fig. 16. This is due to the characteristics of the automated vehicle listed below:
-
The presence of on-board sensors (laser, radar and cameras) allows to perceive more objects at the same time; for this reason, the number of interaction objects perceived by automated vehicles was set to 10, according to literature ([12, 21]).
-
Parameters concerning the car following model such as reaction time and headway were reduced to simulate the ability of automated vehicle to reduce safety distance thanks to the shorter perception and reaction times.
-
The sensors pick up and process traffic light signals, therefore the response of the automated vehicle is faster than the one achievable through human driving. Based on these considerations, the reaction time set is equal to 0.5 s, according to literature ([12, 14, 21]).
Moreover, different cinematic functions simulate the difference between traditional and automated vehicles (defining accelerations and decelerations). Although the average values are the same for the two driving behaviors, acceleration and deceleration functions of automated cars have no fluctuations around said value.
To reproduce in VISSIM the communication between equipped vehicles and infrastructure, an algorithm called “Speed at Signals” calculates the “optimal speed” to minimize or avoid stop time at traffic light (Appendix Fig. 17). There are three different situations:
-
If the vehicle speed is higher than the minimum speed to reach the intersection during green/amber phase, it keeps the desired speed. The maximum speed allowed is the speed limit of the road, so the desired speed must not exceed the maximum.
-
If the signal phase is green and the vehicle cannot reach the traffic light before the green phase ends (because the target speed is higher than the maximum allowed), it slows down to arrive to the crossing as soon as the next green starts. In this case, it can happen that the optimal speed is lower than the minimum set. In this situation, the vehicle will cover at minimum speed the distance that leads to the traffic light and will stop. The minimum speed is 10 km/h for CAVs, 15 km/h for CCVs vehicle. This is the speed value below which vehicles are unable to adapt their speed; very low speeds would degrade traffic to unacceptable levels and would meet a very low compliance rate by human drivers. Therefore, values similar to the ones reported in Sect. 2 were chosen. These values are described in Sect. 4, where the four scenarios are presented.
-
If the signal phase is red, the vehicle slows down, if needed, trying to reach the traffic light as soon as the green starts. The speed indicated as minimum, if reached, is kept constant until the light turns green (or the vehicle reaches the traffic light and stops), then the vehicle can accelerate.
To summarize: the algorithm computes the optimal speed considering the distance vehicle-traffic light, the cinematic functions of the vehicles (acceleration and deceleration values) and the “minimum speed”.
To better understand the results, it is necessary to explain the informed hypothesis behind the simulations.
-
Communication between equipped vehicles and the infrastructure is dedicated for each vehicle. Because V2V communication was not simulated in this work, each connected vehicle adapts its speed without considering the presence of the other vehicles between them and the traffic light, to simulate mixed traffic conditions.
-
Connected cars receive the information given by traffic lights from a distance equal to the length of the considered road branches. This means that as soon as the vehicle enters the network within the model, it starts to adapt its speed if needed. This length does not exceed the range of the broadcasting unit, equal to 1 km [17].
-
In CAVs scenario, all considerations about the driving model of automated cars and connected cars are merged into CAV vehicles. In this case, equipped vehicles not only can receive information from traffic light but also adapt their speed and headway as automated vehicles.
-
To simulate the difference in acceptance between connected traditional cars (CCVs) and connected automated vehicles (CAVs), two different values of minimum speed have been defined (reflecting the higher compliance of the second ones).
As a result of the previous considerations about automated vehicles, the behavioral parameters in Table 1 were assumed.
It is worth providing a short description of each parameter to illustrate how they impact on the driving of CVs rather than the driving of AVs:
-
Interaction objects: it represents the number of observed vehicles or network objects (such as traffic lights) that are considered by the driver (or by the automated vehicle) to define the desired driving behavior. The higher this number, the more efficient the driving system.
-
Average stopping distance: it is the average distance at standstill, with automated vehicles being able to precisely calculate the minimum safe value and to perform it. This value should have a direct impact on the queue lengths.
-
Safety distance: it is composed by a constant value and by a multiplicative value. They both concur, together with the standstill distance, to the desired safety distance as calculated by the drivers or the vehicles during their driving.
-
Reduction factor for safety distance: it reflects how aggressively the driver or the automated vehicles perform a lane change. The higher this value, the higher the reduction in safety distance the vehicle accepts while assessing a lane changing maneuver. An increased aggressiveness in lane changing can improve the performance of the network but also have a disrupting effect on traffic efficiency. Automated vehicles are less aggressive in lane changing than traditionally driven vehicles.
-
Reaction time at traffic lights: represents the responsiveness of drivers or automated vehicles to restart at the green light. The higher the promptness, the higher the efficiency in crossing the intersection.
At the end of this section, it is considered important to briefly describe the behavior of CCVs, AVs and CAVs towards public transport buses, especially at bus stops. In the case study considered, the bus stops are located at the side of the road (see Fig. 7), this means that vehicles are hindered by the presence of buses at the stop. Generally, if stuck behind the bus, all types of vehicles try to change lane: in the case of human-driven vehicles (traditional and CCVs) it is more likely that the lane change is successful, due to the greater aggressiveness of the human driver (as described in this section).
4 Modeling Analysis
Regarding what has been said above, the three guidance systems have been organized in four different scenarios, three of which simulated with increasing market penetration rate:
Scenario 0: it represents the baseline. The actual traffic demand and infrastructural offer (both recorded through a monitoring campaign) were reproduced in VISSIM. This allowed both to build the baseline and to calibrate the traditional traffic with the actual traffic flows.
Scenario A includes CCVs with a traditional driving system, but unlike the traditional vehicles receive cooperative messages and suggested speed values. In this case, since the car is human—driven, the minimum speed was set at 15 km / h.
Scenario B includes AVs. AVs do not receive information from traffic lights but have higher driving performances and reduced headways. The minimum speed set in this case is 10 km/h.
Scenario C merges scenarios A and B into one case study to simulate CAVs. These vehicles can both replace driver’s operations and receive signals from traffic lights. Like scenario B, the minimum suggested speed is set at 10 km/h.
All scenarios were simulated both for the peak and off-peak hour, to understand when the effects of innovative driving systems were more relevant. Automated and connected cars have different values of penetration rate (10%, 30%, 60%, 100%) to underline different impacts as function of penetration indexes (especially with CCVs) and the effects of the coexistence with traditional vehicles. Traffic flows used to calibrate the model were obtained through a monitoring campaign during a representative day of the week, from 07:00 a.m. to 11:00 a.m. and from 4:00 p.m. to 7:30 p.m. to consider in one day both the morning and the evening peak hour. Three vehicular classes (cars, heavy vehicles, motorbikes: see Appendix Fig. 18) have been recorded while a separate survey concerned the buses. The calibration of the longitudinal traffic behavior was based on the control parameter “queue length”, measured as the number of queued vehicles for each traffic light. The simulations ran for a period of 3600 s, for each scenario (A, B, and C). 8 sets of simulations were carried out (four sets for each value of penetration rate, twice to analyze peak and off-peak hours). Every simulation was repeated ten times to vary the stochastic parameters (random seeds) within the model.
4.1 Territorial Framework
The study takes place in the north – east urban area of Milan, at the crossing between Plinio road and Morgagni road. The intersection is rather representative as case study both in its traffic flows and composition within the set of crossings judged of interest by the Municipality. This intersection is characterized by seven vehicular traffic lights assumed equipped with the Time To Green system and seven pedestrian traffic lights. Plinio road and Morgagni road are approximately 300 m long. Figure 1 displays the simulated intersection.

Case study: Via Plinio—Via Morgagni crossing
Simulation results will be presented for each maneuver at the crossing shown in Fig. 2. The evaluation is focused both on the node and the single link, to derive evaluations on the overall system. The C-B and F-E maneuvers were not considered after recording no vehicle carrying out these maneuvers during the monitoring campaign.

Case study—Maneuvers
Figure 19 in the Appendix shows the flows detected within the node during the peak hour and used as input for the model. The forecasted percentage of CCVs, AVs and CAVs was calculated on the number of cars recorded for each maneuver. In Appendix: Fig. 20, the signal phases of the traffic lights are reported.
4.2 Simulation Results
In this study, to assess the impact of GLOSA and automated driving, two important steps of the framework of [22] have been considered. As first step, a site calibration has been conducted, to serve as baseline (Scenario 0). Secondly, a what-if study allowed a comparison between CCVs, AVs and CAVs scenarios, with and without public transport. Since a single intersection is considered, third step is assigned to further papers.
To have an overview of the traffic benefits as a function of the penetration rate of CCVs, AVs and CAVs, four groups of results have been considered within the node and on the links. According to [23], there are two types of impact areas: direct and indirect. The authors, in this study, have chosen to consider two main areas: Energy/Emissions, which is part of direct impacts, and Network Efficiency, which is part of indirect impacts. Network Efficiency in this case will refer only to the intersection considered.
The key performance indicators (KPI) are listed below:
Node results: results deriving from an evaluation of the node are sorted and reported by turning maneuver. Moreover, they are scaled based on the actual flow of each maneuver so that the derived impacts are on the overall traffic passing through the crossing. The following indicators have been considered:
-
Fuel consumption, CO and VOC emissions: in VISSIM, a specific module computes emissions and consumptions taking accelerations as input. This way it was possible to evaluate the effects of innovative driving systems on the Environment impact area [2]. It is acknowledged that this module gives back an approximation (“the black box effect”) but for the analysis presented in this paper, an estimation based on the acceleration diagrams of the vehicles is judged to be sufficient.
-
Average queue length: the measure of the average length of the queue is useful to show the benefits of both automated and connected vehicles on Traffic Efficiency [2].
-
Maximum queue length: this parameter is useful for evaluating possible atypical situations arising from the interaction between connected vehicles adapting their speed and public buses that make stops along the simulated links.
-
Delay: through this parameter it is possible to evaluate the impacts on Traffic Efficiency.
-
Stop delay: through this parameter, time lost by standstill vehicles at the traffic light is measured. Since the main goal of the GLOSA system is to minimize stop times, this parameter is useful for assessing the potential benefits arising from the presence of connected vehicles.
Link evaluations: to show the traffic trend on the links that flow to the node, link evaluations have been carried out through the following KPIs:
-
Relative lost time: delay rate on the link compared to the free-flow travel time. In this way it is possible to measure the delay of vehicles with the free-flow travel time as baseline (absence of other vehicles, obstacles, traffic lights and public transport stops).
-
Queue results: they show the trend of queue length during the entire hour of simulation, with a 30 s resolution.
These parameters were evaluated for each maneuver and link segment, for every scenario and every value of penetration rate. Then, the results on the links and for each maneuver were weighted based on the relative flows. In this way, an overall result on the whole node was obtained.
5 Main Results
This Section shows the main results of the simulations and the comparison between the three scenarios. Improvements shown in charts, except for the queue trend, are all referred as percentages over the baseline scenario 0 (results reported in Appendix Fig. 21) and they are all results of the peak hour simulations (being the one generating the higher benefits). In fact, the results of the evaluation of peak and off-peak hours present similar trends, curves differ just in the magnitudes of the benefits. This seems to be a sound result, with the impacts of Time To Green being more relevant when a congested or almost congested situation can be improved through C-ITS messages, moreover a similar result is obtained by Zhao et al. in [6].
The introduction of automated and connected vehicles fosters strong traffic benefits. Scenario C (CAVs) presents highest improvements compared to the baseline scenario. As can be noted in Fig. 3, benefits are always proportional to the penetration index. The improvement in scenario C of 78% of the vehicle stop delay demonstrates that through V2I communication it is possible to obtain a strong reduction of stop time at the traffic lights with direct consequences on traffic conditions, queue length and environmental impacts. Moreover, the higher “willingness” of AVs to keep lower speeds determines the higher benefits when compared to CCVs, while regarding stop delays it is the connection that provides higher benefits rather than automation. It is also worth highlighting how, after a certain threshold (beyond 60%), the fewer interactions with traditional vehicles grant an increase in efficiency of the traffic.

KPIs – Vehicle delay and vehicle stop delay—improvements
Figure 4 shows the improvements on the average queue length, demonstrating the traffic benefits that can be obtained by innovative driving systems, like the reductions of the KPIs vehicle delay and stop delay do. The progressive reduction of the average queue length is directly connected both to the decrease in stop times and to the reduced headway values kept by AVs or CAVs. It is interesting to notice how the best system to be implemented between GLOSA or automation differs based on market penetration. In fact, while the benefits due to a reduced headway and smoother driving (AVs) are linear with the market penetration, the ones arising in Scenario A appear after a certain threshold, after which the interactions with traditional traffic lose relevance. As a future research direction, a more detailed analysis with different market penetrations can be performed to frame the exact penetration beyond which the interactions with traditional traffic lose relevance. Values of maximum queue length have been evaluated to monitor possible phenomena of negative interactions between traditional traffic and the simulated innovative systems. In this case, a direct proportionality between the benefits and the penetration index does not appear in scenarios A and C, because the maximum queue length may depend on punctual and casual phenomena and may not be necessarily linked to the penetration index of the innovative driving systems. The strongest improvements arise in scenario B, probably because the slowdown of vehicles due to TTG messages interferes with the presence of public transport at stops or with unequipped vehicles (over 60% of market rate there is in fact an improvement in scenarios A and C, with equipped vehicles becoming predominant).

KPIs—Queue results: average and maximun queue length—improvements
The environmental benefits arising from the reductions of queue length and stops at the traffic light are shown in the graphs in Fig. 5. The improvements result from the lower number of stopped vehicles at traffic lights and thanks to the smoother accelerations/decelerations of the automated vehicles (related to a lower fuel consumptions). The higher willingness of AVs to accept low speed values can be a hindrance for lower market penetrations (CAVs reductions are lower than CCVs ones), as far as fuel consumption is concerned. This too should be considered while implementing a GLOSA system in the short term and defining its operational parameters. The reductions in fuel consumption reach a maximum of 27% at a rate of 100% CAVs, in line with [4] which predicts results between about 2% and 58% reduction. In [9], a 30% reduction in fuel consumption was found with respect to connected vehicles, while in [5] and [8] the reduction was 17% and 7% respectively, results more similar to those obtained in this simulation.

KPIs—Environmental results—improvements
In Fig. 6, scenario B is bringing the strongest benefits. This is probably due to the fact that the average speed on the links in scenarios A and C is lower than in scenario B (due to the Time To Green suggestion). The lower values of CAVs scenario compared to the ones in CCVs scenario for many market penetrations derives from the different minimum speed set for automated and human-driven vehicles. CCVs have a minimum speed value of 15 km/h, CAVs on the other hand have 10 km/h, as reported in Sect. 3. Because relative time lost reflects the delay rate limited to the links and ignores the benefits within the crossing, low speed values cause lower improvements.

KPIs—Relative time lost—improvements
Another interesting result obtained through simulations is the queue trend along the links that can be found in Appendix Fig. 22 For every scenario and for every value of penetration rate, the trend of the queue length was evaluated with a resolution of 30 s. These results are linked to the values of average and maximum queue length. In the charts reported in Fig. 22, the most representative case is shown: Morgagni road presents the highest values of queues, with peaks at bus stops, as it is possible to notice the introduction of automated and connected vehicles reduces the average value (red line) and the oscillations that fall almost around zero, except for the peaks. These peaks are almost unchanged by the presence of CAVs because bus stops are not touched by the Time to Green (TTG) system and they regularly keep on causing long values of queues behind the buses.
Considering the high number of scenarios that were analyzed, it is worth to provide a comparison of the impacts in the three scenarios for the different market penetration (Table 2) and an overview of the maximum achievable results arising from the highest market penetration of CAVs (Table 3).
The best results concern the average length of the queues and the stop delay KPIs. Except for relative lost time and maximum queue length, all the KPIs achieve the greatest benefits with automated and connected cars (scenario C); this demonstrates that joint implementation brings benefits greater than the simple sum of their individual benefits.
To better understand how CAVs models modify the normal driving behavior in the simulations, please refer to Appendix Fig. 23.
6 Comparison With Results in Case of Absence of Public Transport
As a further elaboration, the authors simulated the case study of the intersection assuming that there was no local public transport, keeping the same parameters listed above, in order to investigate how the presence of stops affects the three scenarios and which scenario is the most affected within the various KPIs.
Therefore, to make comparisons, the same KPIs were considered and the improvements in percentage terms of the individual scenarios were assessed, comparing the values for each market penetration index. This allowed the authors to draw some conclusions about the importance of the effects of public transport and bus stops on the potential of innovative driving systems and may foster considerations about the management of the co-existence of the two systems.
The case study conducted so far includes three bus stops in the area in question, two along Plinio road, in two opposite directions, and one along Morgagni road (Fig. 7) the impacts have been more evident along these segments. However, in this article the results of the new simulations are reported on the node as a whole, to compare them with the results of the main case study.

Location of bus stops
By comparing scenario by scenario the results obtained from the simulations without public transport with the values obtained from the previous simulations, it can be seen that some percentage improvements show a similar trend, although with different values, while others differ and deserve a more careful examination.
6.1 Results
In the following graphs and tables (Figs. 8 to 14), the improvements are reported as a percentage with respect to the same scenario and the same level of technology penetration of the previous analysis. Thus, the baseline scenarios for this evaluation are the scenarios evaluated in Sect. 5.
Starting from delays results, the maximum improvements are from scenario C, in case of Market Penetration Index (MPI) equal to 100%. In both cases there is a general improvement, but the improvement trends are very different one from the other.
Vehicle delay (Fig. 8: Node KPIs – Delay improvements) presents the largest improvements within scenario C, associated with a growing trend with market penetration. Similarly, the improvements in scenario A are growing as the presence of CCVs increases. These trends reveal that the absence of bus stops enhances the positive effects of CCVs and CAVs. Scenario B, on the other hand, shows the opposite trend, with an improvement at 100% MPI lower than scenario A. It can be deduced that the absence of bus stops, which in general cause slowdowns and delays to the vehicles queued up, has a positive effect in all cases analyzed, but in scenarios A and C it increases in accordance with the Market Penetration Index (MPI), while in scenario B the positive effects derived from the absence of bus stops decrease as the presence of automated vehicles increases. This can be explained by the fact that automated vehicles do not receive the Time To Green message, consequently they maintain a higher speed in general, and the more AVs there are the more the traffic is smooth. The presence of bus stops creates delays anyway (in fact the absence of them, as already stated, brings benefits anyway), but they are less evident as the MPI grows. In other words, the automated vehicles, thanks to their characteristics, make the traffic smoother as their presence increases, and this makes the presence of the bus less and less incisive on the general effects. The fact that scenario C shows percentage improvements higher than scenario A is due the parameter of driving aggressiveness in the lane change situation, which has been set as higher for the human driver than the on-board software of the CAV. This aspect results in a smaller fraction of CAV vehicles that manage to change lanes if hampered by the bus at a stop, so the absence of this situation produces more substantial improvements in scenario C.

Node KPIs – Delay improvements
The KPI "Vehicle Stop Delay" (Fig. 9) presents general improvements for all scenarios, along with the improvement trends they presented also for Vehicle Delay. It is interesting that scenario C MPI 100% sees an improvement resulting from the absence of bus stops that reaches 40%. The reason could be that CAVs present reduced aggressiveness behavior in changing lane and keep reduced headway, making it difficult to insert between two CAVs in the lane in which the stopping vehicle wants to move. So, vehicle find themselves stuck in the queue behind the stopped bus, thus having great benefits from the absence of this stop.

Node KPIs – Stop Delay improvements
As regards queue length, there is a very different trend in the improvement between average and maximum results. The average queue length (Fig. 10), in fact, sees an increasing trend of improvements for all scenarios, with the maximum benefits obtained by the CAVs and, to a lesser extent, by the AVs. The CCVs, being able to count on a greater aggressiveness when driving, have more possibilities to change lanes in case of queuing behind the bus, therefore they obtain less benefits from its absence. CAVs get more benefits for two reasons: like AVs they are based on automated driving, less aggressive and with a reduced headway in the destination lane, which is why it is difficult to escape the queue created by the bus stop as explained before, but unlike AVs they also follow the Time To Green, creating longer bus queues due to the possible slowdown near the traffic lights. Therefore, these two disadvantages in terms of the average queue result in greater improvements if the combination with the bus stop is eliminated.

Node KPIs – Average Queue Length improvements
Similar comments can be applied to the KPI Maximum Queue Length (Fig. 11). CCVs do not have a significant improvement from the absence of the bus, AVs and CAVs instead have greater improvements by eliminating the bus stop. It is also clear that Time to Green has less effect on the maximum queue value: scenario C is exceeded in the improvements by scenario B (except for the case 60% MPI). Within scenario C, the 30% market penetration sees a lower improvement, probably related to the effects of the interactions between a limited but growing presence of CAVs and traditional vehicles, which maintain high queue values despite the absence of bus stops.

Node KPIs – Maximum Queue Length improvements
As can be seen from the graphs reported, Figs. 12 and 13, the KPIs regarding fuel consumption and emissions present the same trend (emission is proportional to fuel consumption). This shows a strong and stable correlation between improvements and innovative driving systems, regardless of whether public transport is present or not. Clearly, as all KPIs benefit from the absence of interaction with public transport, fuel consumption, CO and VOC emissions also benefit, although less than other KPIs.

Node KPIs – Fuel Consumption improvements

Node KPIs – CO emissions improvements (VOC emissions has identical graph)
Regarding link results, considering relative lost time (Fig. 14), scenario B shows the greatest improvements, followed by scenario C and scenario A. As usual, the bus stop tends to create more problems for automated vehicles. This is proportional to the market penetration index, as automated vehicles replace traditional ones.

Link KPIs – Relative Lost Time improvements
As evidence of what was previously stated about the trends of the queues, considering scenario C on Morgagni road at 100% CAVs (please refer to Appendix Fig. 22), it can be noted that the absence of public transport involves a flattening of the curve, in addition to significantly lowering the average (about 3 m).
7 Conclusions
In this paper, the impact of self-driving and connected cars in a signalized intersection was studied. This type of analysis seems to be desirable to derive a set of recommendations and best practices for public bodies and authorities, to allow the implementation of the GLOSA system in the most efficient way without ignoring the peculiarities and features of each case study (e.g. the bus route in the Plinio-Morgagni crossing). The results of this case study can be transferred or up-scaled to other urban contexts, as long as the boundary conditions of the described scenarios are met.
The analysis of the node has also allowed the following considerations:
-
All scenarios show overall improvements compared to the baseline both in Traffic Efficiency and Environmental results.
-
Except for some parameters (maximum queue length and relative lost time), the overall improvement on the node is always growing with the penetration index. This means that the greatest improvements occur for penetration indexes of 100% (both for CCVs, AVs or CAVs). For some parameters and values of the penetration indexes (10%, 30%, 60%), irregular trends arise for the individual maneuvers. This could be due to the interactions between the different driving systems, which can punctually create random phenomena and bringing negative impacts on the single maneuvers. An element that strongly influences the trending is, for example, the number of lanes and the possibilities for vehicles to overtake.
-
Since the intersection is urban, it was not always possible to achieve improvements on all individual maneuvers, mainly due to the interaction between the different types of vehicles (automated / connected and traditional), the driving model implemented in VISSIM and the specific characteristics of the analyzed intersection. This also reflects the fact that the new technologies can improve the overall performance of the node but impact differently on each link, depending on its boundary conditions.
-
By eliminating the interactions between public transport and vehicles, it is possible to obtain overall improvements for all scenarios and KPIs compared to the corresponding simulations with bus stops.
-
The results show that bus stops have a greater impact on automated vehicles, as improvements in AVs are generally higher than in CCVs scenario. The absence of public transport has a positive impact on connected vehicles using GLOSA as well, although less than on self-driven vehicles. Therefore, CAVs are the ones that in most cases achieve the most improvements.
The results have a double worth, increasing the number of results present in literature both for connected and automated vehicles and defining some first consideration about future best practices and implementation logics, to be applied to assess the best designing framework for intersections. As a future research direction, it is desirable that these first considerations (and the future ones) could be formalized into guidelines to help public bodies and authorities in choosing what kind of system prioritize (e.g. automated driving rather than GLOSA, on every branch or with exceptions where public transport operates, etc.). In the meantime, this paper provides a first set of results and considerations, in fact it can be stated that the results prove that, even though the node improves traffic efficiency in each scenario, different factors concur into making automated driving rather than GLOSA the most useful system.
References
Qu, X., Li, X., Wang, M., Dixit, V.: Advances in Modelling Connected and Automated Vehicles. J. Adv. Transp. 2017, 3268371 (2017)
Studer, L., Agriesti, S., Gandini, P., Marchionni, G., Ponti, M.: Impact assessment of cooperative and automated vehicles. In: Lu, M. (Ed.) (2019). Cooperative Intelligent Transport Systems: Towards High-Level Automated Driving. IET (Institution of Engineering and Technology), London. ISBN: 978–183953–012–8 (Print) / 978–183953–013–5 (eBook) (in press)
Nguyen, V., Kim, T. T. O., Dang, N. T., Moon, S., Hong, C.S.: An Efficient and Reliable Green Light Optimal Speed Advisory System for autonomous cars. In: 18th Asia-Pacific Network Operations and Management Symposium (APNOMS) (2016)
Jiang, H., Hu, J., An, S., Wang, M., Park, B.B.: Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment. Transp. Res. Part C 79, 290–307 (2017)
Wan, N., Vahidi, A., Luckow, A.: Optimal speed advisory for connected vehicles in arterial roads and the impact on mixed traffic. Transp. Res. Part C 69, 548–563 (2016)
Zhao, Y., Wagh, A., Hou, Y., Hulme, K., Qiao, C., Sadek, A.W.: Integrated Traffic-Driving-Networking Simulator for the Design of Connected Vehicle Applications: Eco-Signal Case Study. Journal of Intelligent Transportation Systems 20(1), 75–87 (2016)
Gajananan, K., Sontisirikit, S., Zhang, J., Miska, M., Chung, E., Guha, S., Prendinger, H.: A cooperative ITS on green light optimisation using an integrated Traffic, Driving, and Communication Simulator. In: Australasian Transport Research Forum, Brisbane (2013)
Katsaros, K., Kernchen, R., Dianati, M., Rieck, D.: Performance study of a Green Light Optimized Speed Advisory (GLOSA) Application Using an Integrated Cooperative ITS Simulation Platform. In: 7th International Wireless Communications and Mobile Computing Conference (2011)
Sanchez, M., Cano, J., Kim, D.: Predicting traffic lights to improve urban traffic fuel consumption. In: 6th International Conference on ITS Telecommunications (2006)
Tielert, T., Killat, M., Hartenstein, H., Luz, R., Hausberger, S., Benz, T.: The impact of traffic-light-to-vehicle communication on fuel consumption and emissions. In: 2010 Internet of Things (IOT) (2010)
Bodenheimer, R., Eckhoff, D., German, R.: GLOSA for Adaptive Traffic Lights: Methods and Evaluation. In: 7th International Workshop on Reliable Networks Design and Modeling (2015)
Stanek, D., Huang, E., Milam, R. T., Wang, Y.: Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation. Available at https://www.fehrandpeers.com/wp-content/uploads/2018/01/Measuring-Autonomous-Vehicle-Impacts-on-Congested-Networks-Using-Simulation_revised.pdf (2018)
Shi, L., Prevedouros, P.: Autonomous and Connected Cars: HCM Estimates for Freeways with Various Market Penetration Rates. Transportation Research Procedia 15, 389–402 (2016)
Aria, E., Olstam, J., Schwietering, C.: Investigation of Automated Vehicle Effects on Driver’s Behavior and Traffic Performance. Transportation Research Procedia 15, 761–770 (2016)
Wietholt, T., Harding, J.: Influence of dynamic traffic control systems and autonomous driving on motorway traffic flow. Transportation Research Procedia 15, 176–186 (2016)
SAE international: Taxonomy and Definitions for terms related to Driving Automation Systems for On-Road Motor Vehicles. SAE INTERNATIONAL J3016. Available: https://www.sae.org/standards/content/j3016_201609/ (2016). Accessed 13 Apr 2018
Studer, L., Agriesti, S., Gandini, P., Marchionni, G., Ponti M.: Highway Chauffeur: state of the art and future evaluations: Implementation scenarios and impact assessment. In: International Conference of Electrical and Electronic Technologies for Automotive (2018)
Bashiri, M., Jafarzadeh, H., Fleming, C. H.; PAIM: Platoon-based Autonomous Intersection Management. In: 21st International Conference on Intelligent Transportation Systems (ITSC) (2018)
Perronnet, F., Abbas-Turki, A., El-Moudni, A., Buisson, J., Zéo, R.: Cooperative Vehicle-Actuator System: A sequence-based optimal solution algorithm as tool for evaluating policies. In: 2013 International Conference on Advanced Logistics and Transport, Sousse, pp. 19–24 (2013)
Studer, L., Agriesti, S., Ponti, M., Gandini, P., Marchionni, G., Borghetti, F., Paglino, V., Maja, R., Bruglieri, M.: Evaluation approach for a combined implementation of Day 1 C-ITS and Highway Chauffeur – v.1.0. Ex-Ante Evaluation Report, C-Roads Italy Platform (2018)
PTV: PTV VISSIM & Connected Autonomous Vehicles (2018)
Kuwahara, M., de Kievit, M., Shladover, S., Zhang, W. B., Barth, M.: Guidelines for Assessing the Effects of ITS on CO2 Emissions -International Joint Report. Available: https://www.ttsitalia.it/file/100521807.pdf. Accessed 20 Nov 2020
Innamaa, S., Smith, S., Barnard, Y., Rainville, L., Rakoff, H., Horiguchi, R., Gellerman, H.: Trilateral Impact Assessment Framework for Automation in Road Transportation. DRAFT Version 1.0. https://connectedautomateddriving.eu/wp-content/uploads/2017/05/Trilateral_IA_Framework_Draft_v1.0.pdf. (2017). Accessed: 20 Nov 2020
Alessandrini, A., Campagna, A., Delle, S.P., Filippi, F.: Automated Vehicles and the Rethinking of Mobility and Cities. Transportation Research Procedia 5, 145–160 (2015)
Asadi, V.: Predictive cruise control: Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. In: Control Systems Technology, p 1–9 (2010)
Bierstedt, J., Gooze, A., Gray, C., Peterman, J., Raykin, L., Walters, J.: Effects of Next Generation Vehicles on Travel demand and Highway Capacity. Fehr Peers (2014)
Bimbraw, K.: Autonomous Cars: Past, Present and Future: a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology. In: 12th International Conference on Informatics in Control, Automation and Robotics (2015)
Camera dei Deputati: La mobilità del futuro: l'auto a guida autonoma. (2017)
Childress, S., Nichols, B., Charlton, B., Coe, S.: Using an Activity-Based Model to Explore the Potential Impacts of Automated Vehicles. Transp. Res. Rec. 2493(1), 99–106 (2015)
Dalla Chiara, B., Deflorio, F. P., Cuzzola, S.: A proposal of risk indexes at signalised intersections for ADAS aimed to road safety. In: 9th International Conference on Informatics in Control Automation and Robotics, Rome (2012)
ETSI: Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications (2009)
Commissione Europea: Una strategia europea per i sistemi di trasporto intelligenti cooperativi, prima tappa. Bruxelles (2016)
Fountoulakis, M., Bekiaris-Liberis, N., Roncoli, C., Papamichail, I., Papageorgiou, M.: Highway traffic state estimation with mixed connected and conventional vehicles: Microscopic simulation-based testing. Transp. Res. Part C 78, 13–33 (2017)
G7 Transport Ministers’ Meeting Declaration: Development and Widespread Utilization of Advanced Technology for Vehicles and Roads. Karuizawa (2016)
Greenblatt, J., Shaheen, S.: Automated Vehicles, On-Demand Mobility, and Environmental Impacts. Current Sustainable/Renewable Energy Reports 2(3), 74–81 (2015)
Homem de Almeida Correia, G., van Arem, B.: Solving the User Optimum Privately Owned Automated Vehicles Assignment Problem (UOPOAVAP): A model to explore the impacts of self-driving vehicles on urban mobility. In: Transportation Research Part B, vol. 87, pp. 64–88 (2016)
Kim, Y. K.: An Analysis of Expected Effects of the Autonomous Vehicles on Transport and Work. p. 1–29 (2015)
Kim, K., Yook, D., Ko, Y., Kim, D.: An Analysis of expected of the Autonomous Vehicles on Transport and Land Use in Korea. Working Paper, Marron Institute of Urban Management (2015)
Le Vine, S., Liu, X., Zheng, F., Polak, J.: Automated cars: Queue discharge at signalized intersections with ‘Assured-Clear-Distance-Ahead’ driving strategies. Transp. Res. Part C 62, 35–54 (2016)
Le Vine, S., Zolfaghari, A., Polak, J.: Autonomous cars: The tension between occupant experience and intersection capacity. Transp. Res. Part C 52, 1–14 (2015)
Litman, T.: Autonomous Vehicle Implementation Predictions Implications for Transport Planning. In: Transportation Research Board 94th Annual Meeting, Washington (2015)
Llorca, C., Moreno, A., Moeckel, R.: Effects of Shared Autonomous Vehicles on the Level of Service in the Greater Munich Metropolitan Area. In: International Conference on Intelligent Transport Systems in Theory and Practice, mobil.TUM, Munich (2017)
Nguyen, V., Kim, O., Dang, T., Moon, S., Hong, C.: An efficient and reliable Green Light Optimal Speed Advisory system for autonomous cars. 18th Asia-Pacific Network Operations and Management Symposium (APNOMS) (2016)
PTV: VISSIM 5.30–05 User Manual (2011)
Radivojevic, D., Stevanovic, J., Stevanovic, A.: Impact of Green Light Optimized Speed Advisory on Unsignalized Side-Street Traffic. In: Transportation Research Record, vol. 2557, no. 1 (2016)
Stevanovic, A., Stevanovic, J., Kergaye, C.: Impact of Signal Phasing Information Accuracy on Green Light Optimized Speed Advisory Systems. In: Transportation Research Board Annual Meeting (2013)
Tientrakool, P., Ho, Y., Maxemchuk, N. F.: Highway capacity benefits from using vehicle-to-vehicle communication and sensors for collision avoidance. In: Vehicular Technology Conference (VTC Fall) (2011)
Zhao, J., Liang, B., Chen, Q.: The key technology toward the self-driving car. Int. J. Intell. Unmanned. Syst. 6, 2–20 (2018)
Funding
Open access funding provided by Politecnico di Milano within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix

Literature review – Impacts

key parameters of VISSIM. In red, the parameters modified to simulate automated vehicles behaviors

algorithm "Speed at Signals" (PTV Group – 76131, Karlsruhe, Germany): User defined attributes and logical operations

Vehicle types in VISSIM: length and acceleration

Traffic flows during peak hour

Signal Phases. The signal group are defined in Fig. 1

Baseline results

Queue fluctuations and trend line along Morgagni road for baseline scenario and Scenario C (100% CAV), both with and without public transport

Difference in traditional and CAV behaviors: space-time diagram and speed-space profile
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Studer, L., Ponti, M., Agriesti, S. et al. Modeling Analysis of Automated and Connected Cars in Signalized Intersections. Int. J. ITS Res. 20, 379–397 (2022). https://doi.org/10.1007/s13177-021-00279-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13177-021-00279-w