
Abstract
To evaluate the generalities of acceptability of a proactive braking intervention system, which anticipates an imaginary pedestrian rushing out from occluded areas, and driving environmental dependencies, we conducted field operation tests (FOTs), where 146 elderly drivers participated at three evaluation sites with different urban characteristics. Analyses regarding the coexisting traffic participants illustrate driving environmental characteristics at each evaluation site. Evaluations via TMT-J, DSQ, and WSQ compare the characteristics of experimental participants. Based on these results as premises, we analyze questionnaire answers regarding the proposed system. As a result, we confirm the generalities that more than half of the participants at each evaluation site expressed a desire to introduce the proposed system into their own vehicle.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In conjunction with the growth of the Japanese aged society [1], traffic accidents caused by elderly drivers have become a prominent social issue in Japan [2]. To help prevent such traffic accidents, we started the project to develop autonomous driving intelligence for supporting elderly drivers [3]. In support of these drivers, advanced driver assistance systems (ADAS) of which functions are automated to a certain degree are desired to enhance the driving performance of elderly drivers which has usually deteriorated due to physical functional decline related to their aging [4]. To date, various driver assistance systems have been developed, such as Lane Keeping Assist (LKA), Adaptive Cruise Control (ACC), and Autonomous Emergency Braking (AEB) systems, for driving on major roads including highways. However, such driver assistance systems designed specifically for community roads, where elderly motorists drive cars daily, have not been sufficiently discussed.
As for the traffic accidents caused by elderly drivers on community roads in Japan, the Institute for Traffic Accident Research and Data Analysis (ITARDA) reported that collision accident at non-signalized crossings is one of typical cases [5]. Figure 1 shows an example of occluded crossings on Japanese community roads. As shown in the figure, visibility around non-signalized crossings on community roads is generally poor due to roadside structural occlusions such as house walls. Although pedestrians rushing out from such occluded areas are dangerous, AEB systems may not be effective due to the lack of time between their detection by on-board sensors and the conflict point arrival in such situations; thus, such pedestrians sometimes result in traffic accidents. Therefore, not only the event-based deceleration triggered by on-board sensors but also the proactive deceleration based on preliminary information are necessary for ADAS on community roads. On this point, because community roads are not usually equipped with roadside cooperative sensing systems such as the driving safety support system (DSSS) [6], anticipation of an imaginary pedestrian behind occluded areas is the key for proactive deceleration. Based on this concept, Saito et al. [7] developed proactive braking intervention systems with the foresighted driver model that anticipated a pedestrian rushing out from occluded areas around blind crossings.

Example of an occluded crossing
For improving the new systems and familiarizing them to the public, evaluation of the acceptability of them is necessary. Although there are various methods to evaluate the acceptability, field operation tests (FOTs) by real target users using actual experimental vehicles on existing roads are important for not missing any consideration factors. In addition, although there are various driving environments in the real world, generalities of the acceptability and driving environmental dependencies have not been adequately discussed. Therefore, in this study, we intended to confirm the proactive braking intervention system acceptability via the FOT at more than one evaluation site for discussing generalities of the acceptability and driving environmental dependencies.
The remainder of this paper is organized as follows. Chapter 2 describes the proactive braking intervention system details and the acceptability evaluation strategy. The experimental details for evaluation are described in Chapter 3. The results and discussions are described in Chapter 4. Finally, Chapter 5 summarizes the conclusion and describes future work.
2 Proactive Braking Intervention System
2.1 Concept of Proactive Braking Intervention System
On community roads, pedestrians sometimes rush out from the occluded area around blind crossings. Although recent automobiles are sometimes equipped with AEB systems, detectable areas by on-board sensors may be partially occluded by surrounding roadside objects. In such situations, because AEB operational timing may be delayed from ideal one, it may result in shortage in deceleration of the vehicle. Furthermore, if the vehicle entry velocity into the crossings is high in such situations, collisions with pedestrians occur. Thus, proactive deceleration before operating AEB systems is important for compensating the on-board sensor limitations on community roads. Although mature human drivers usually conduct this kind of hazard-anticipatory driving, some drivers do not drive cars in that manner. Thus, an ADAS with the foresighted driver model that intervenes with driver operations and conducts proactive braking for the posterior AEB systems, in the event pedestrians actually do rush out, is desired. This is the proactive braking intervention system concept.
2.2 Behavior of Proactive Braking Intervention System
Figure 2 shows the targeted situational schematic of the proactive braking intervention system. Although the proactive braking intervention system needs to grasp the position of occluded crossings, the robust detection of such crossings by only the on-board sensors is difficult. Thus, our proposed system uses a digital map, which we call LeanMAP [8], as supplementary information. The LeanMAP consists of nodes and links for expressing the road network. In the LeanMAP system, the longitudinal vehicle position is expressed as a driving distance from an origin point of a link along the road. We call the longitudinal position “offset”, as shown in Fig. 2. Moreover, the LeanMAP system contains crossing position information, which is expressed as offset. Furthermore, the localizer system can determine the vehicle position. Thus, our proposed system can estimate relative distance to blind crossings for the vehicle motion control. The motion control system based on the foresighted driver model developed by Saito et al. [7] assumes an imaginary pedestrian behind the occluded area around the blind crossing. As shown in Fig. 2, Dp denotes an assumed distance between the imaginary pedestrian and a wall, Yp denotes an assumed distance between the imaginary pedestrian and the vehicle, Vp denotes an assumed velocity of the imaginary pedestrian, Dcar denotes the relative distance from the vehicle to the crossing, and Ygap denotes the distance between the vehicle and a wall. Based on some assumed parameters such as Dp, Yp, and Vp, and other observable parameters such as Dcar and Ygap, the proposed system calculates a reference velocity Vmin, which is a constant value depending on each situation, as a target velocity of proactive deceleration. The definition of Vmin is the maximum velocity at which the vehicle can avoid the collision with pedestrians on the assumption of additional autonomous emergency braking systems in the target situation. Furthermore, the proposed system calculates the necessary deceleration value based on the Vmin, time-series velocity, and relative distance to the crossings.

Targeted situational schematic of proactive braking intervention system
Figure 3 shows a conceptual velocity profile schematic by proactive braking intervention. The horizontal axis indicates offset. The vertical axis of the upper graph indicates the velocity, whereas that of the lower one indicates the target deceleration value calculated by the system. The upper graph blue line indicates the velocity profile, whereas the red line indicates the Vmin for a certain situation. If the vehicle velocity is greater than Vmin around a blind crossing, the system conducts the braking intervention for decelerating to Vmin before the crossing entrance. The braking intervention end position is set slightly before the crossing entrance because the vehicle can detect the pedestrian, if he/she exists, at the position. The system starts braking intervention, if necessary, 5.0 s before passing through the end position. The timing of 5.0 s was determined in our previous study [9] to reproduce the deceleration of driving instructors, who were mature drivers. During the system intervention, the system ignores the driver acceleration operation. As for the motion control formulations, the details were described in the previous study [7].

Conceptual velocity profile schematic by proactive braking intervention
Although the proposed system was primarily designed for proactive deceleration while approaching blind crossings, it can be used for proactive deceleration while overtaking parked cars that create occluded areas behind them. Although the digital map supplies the necessary information of relative distance for proactive deceleration around blind crossings, vehicle information detected by on-board sensors can supply similar information instead. Based on such information, the proposed system can calculate the equivalent Vmin while overtaking parked cars. In addition, the proposed system can also be used for supporting drivers at stop lines. If 0.0 is assigned to Vmin, the proposed system can stop the vehicle at the stop line, the position of which is registered in the LeanMAP. Because violating the regulation relating to stopping at stop lines sometime may cause traffic accidents on community roads, supporting elderly drivers in such situations seems useful. Thus, in this study, we tested not only proactive deceleration around the blind crossings but also the abovementioned functions.
Because the proposed system partially controls the vehicle independently from driver operations, the drivers may feel surprise and anxiety about such controls. To prevent this, the proposed system tells advanced notifications and current braking intervention states via a heads-up display (HUD). Figure 4 shows the conceptual transition schematic of the provided information. First, from 7.5 s before the end of braking intervention, the HUD beeps a sound and displays the proactive deceleration reason as an advance notification. Then, from 5.0 s before the end of braking intervention, the HUD beeps again and displays the current proactive deceleration states. The yellow side bar length decreases according to the remaining proactive braking intervention time. The displayed icons are different for each situation, as shown in the figure. The Japanese characters in the icons mean “stop line”, “slow down” and “stop”, respectively, as shown in the figure. The details of designing the information sharing system are described in previous studies [10,11,12].

Conceptual transition schematic of provided HUD information
2.3 Preparation of Data Collection for Evaluating Proactive Braking Intervention System
To date, various FOTs have been conducted globally. One of the most famous FOTs was “euroFOT” [13], where 28 industrial companies and research institutes conducted large-scale FOTs for evaluating the ADASs in European countries. Their FOT activities consisted of 3 steps: Preparation, data collection, and analysis from various viewpoints. By following this architecture, we organized our project to evaluate the proposed system. Figure 5 shows the flowchart and summary of our previous and ongoing approaches for evaluating the proposed system. At the preparation stage, we conducted driving simulator (DS) experiments and two types of FOTs: Pre-FOT and Pilot FOT. First, we conducted DS experiments [7, 14] for extracting potential problems and summarizing the proposed system issues. Because the proposed system had new concepts of hazard anticipation and proactive braking intervention, we needed to observe the user behaviors in the controlled environments. Thus, we used DS as a first step. Then, we conducted Pre-FOTs [15, 16] for discussing the evaluation methods. The advanced points from DS experiments were that we conducted the evaluation tests in the real world by using actual experimental vehicles. However, because we did not know how the experimental participants would behave and interact with the proposed system, we conducted the Pre-FOT on the private test course for safety. After that, we conducted Pilot FOTs [9, 17] for confirming the unique problems on public roads. The advanced points from Pre-FOTs were that evaluations were conducted on public roads. Finally, based on the abovementioned preparation findings, we conducted Total FOT, which is described in this study, for collecting large-scale data at various sites. The advanced points from Pilot FOTs are that the data were collected at more than one region under basically the same experimental protocols for discussing the generalities of acceptability and variances depending on regional differences.

Flowchart and summary of our approaches for evaluating the proactive braking intervention system
2.4 Analyses of Collected Data
There are various collected data analysis viewpoints for evaluating the proposed system. Because the primary objective of this study was the discussion regarding the generalities of acceptability of the proposed system and driving environmental dependencies, we needed to analyze both the proposed system acceptability and driving environmental characteristics at each evaluation site. However, when we collect the data for evaluation at multiple evaluation sites, not only do the driving environmental differences, but also the driver characteristics differences among the evaluation sites, if exists, may affect the proposed system evaluations. On this point, although we considered that there are naturally different driver characteristics among individual participants, the important point is whether or not there are group differences among evaluation sites. Thus, we also needed to confirm the driver characteristics of the experimental participants as premises for discussing the generalities and dependencies. In addition, because some parts of driver characteristics might be related to the urban characteristics and driving environmental characteristics, we needed to confirm the relations among them, if the differences of driver characteristics existed. Therefore, we investigate and analyze the following topics in this study.
-
Driving environmental characteristics where data were collected
-
Characteristics of experimental participants
-
Proposed system acceptability via questionnaires
Although quantitative analyses from other viewpoints such as experimental participant behaviors and system effects for safe driving are also necessary for evaluating the proposed system in detail, the abovementioned topics require analysis prior to the other topics as a first step of follow-through analysis for our FOT data, as shown in Fig. 5.
2.5 Acceptability Evaluation
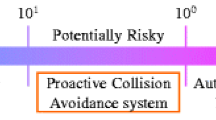
To date, acceptability of various in-vehicle driver assistance systems which are intervention type such as ACC and AEB has been examined in accordance with the development of such systems. Figure 6 shows the conceptual schematic of relation between driver assistance systems and driving situations. For example, ACC is usually used in relatively stable driving situations such as highway. Because drivers use such systems with their intentions, conflicts between the drivers and the systems basically do not occur. On the other hand, although AEB is executed independently of drivers’ intentions, the situations are so dangerous that the drivers cannot do anything. Thus, conflicts between them basically do not occur also in this situation. However, the proactive braking intervention system is assumed to be used in the potentially dangerous situation. In this situation, the system interveners the vehicular motion controls prior to and independently of driver operations while the driver also intends to control the vehicle. Thus, conflicts between them may occur. To be more precise, the proposed system users may feel annoyance although they may simultaneously feel system benefits.

Schematic of relation between driver assistance systems and driving situations (this figure is modified from one in our previous paper [14])
To discuss such complicated acceptability, in our previous study [14], we focused on the following three viewpoints as components of acceptability, and the viewpoint of desire to introduce the proposed system into their own vehicles as an aspect of evaluating the total acceptability of the proposed system. Figure 7 shows the conceptual schematic of hierarchical sources of total acceptance.
-
Reactive acceptance and refusal: Evaluation based on the instinctive factor during use of the system.
-
Comprehensive acceptance and refusal: Evaluation based on sufficient understanding of the system merits and demerits.
-
Reflective acceptance and refusal: Evaluation based on the self-image as the owner of the system among others and society.

Schematic of hierarchical acceptance sources [14]
In the previous studies [14, 16, 17], we confirmed that the comprehensive factors were positively evaluated; further, it led to the positive evaluation of total system acceptance. However, such evaluations regarding each factor were conducted in the limited preparation stage conditions. In addition, because some parts of reactive factors might be sensitive to the driving environmental characteristics and driver characteristics, investigating reactive factors among different regions would be beneficial. Thus, in this study, we intended to discuss the generalities and differences of the evaluation results for each factor while considering regional differences. In other words, we strove to confirm whether or not evaluations of each factor depend on the regional differences.
3 Experiments
3.1 Experimental Organization
Experiments for data collection were conducted at three evaluation sites: The Koganei area conducted by Tokyo University of Agriculture and Technology, the Kashiwa area conducted by the University of Tokyo, and the Atsugi area conducted by Kanagawa Institute of Technology. The following protocols of each experiment for data collection and sharing of de-identified data among research collaborators were approved by the institutional review board for human studies of the corresponding universities. We explained the experimental protocol to the participants, and obtained written informed consent from them.
3.2 Experimental Participants
Elderly drivers as experimental participants were recruited respectively by the research members of each experimental site. The following conditions were requested to them.
-
They needed to have a valid driving licenses.
-
They needed to drive a car regularly.
-
They needed to be equal to or older than 65 years old.
As for the Koganei and Kashiwa areas, the experimental participants were dispatched from Silver Human Resources Centers at Koganei and Kashiwa. As a result, we recruited 67 participants from the Koganei area, and 65 participants from the Kashiwa area. Because they belonged to each Silver Human Resources Center, they lived in Koganei city and Kashiwa city. As for the Atsugi area, because we could not get them dispatched from Silver Human Resources Center, we recruited participants by the snowball sampling method. Although we recruited a total of 27 participants at the Atsugi area, some of them were retired workers of the company that participated in this project. Thus, because the analyses in this study focused primarily on the questionnaire answers that may have been affected by such relations with the participants, we excluded the data of those participants from the analyses regarding human factors to avoid biased data and a conflict of interest. As a result, we obtained valid data from 14 participants at the Atsugi area. In addition, because they were recruited by snowball sampling method, their residences were not limited to the city of Atsugi; however, they basically lived in the neighboring cities, where the driving environments were similar to those of Atsugi city. Table 1 shows the basic characteristics of experimental participants.
We paid honorarium to the experimental participants. For Koganei area, we paid the Silver Human Resources Centers at Koganei 1500 JPY/hour, which is equivalent to approximately 14 USD/hour at the rate of the that time, including administrative expenses, the rate of which was not open to us. For Kashiwa area, we paid the Silver Human Resources Centers at Kashiwa approximately 1500 JPY/hour excluding administrative expenses. For Atsugi area, we paid directly the experimental participants 1500 JPY/hour. In addition, we also paid traveling expenses according to actual conditions. These honorariums were determined by the rules of each Silver Human Resources Center and each University. Although the honorarium for the experimental participants of Koganei area were bit smaller than those of other areas due to the administrative expenses of Silver Human Resources Center, the differences among them were considered to be small. Thus, we considered that there were not any factors affecting the evaluations from the viewpoint of honorarium.
3.3 Experimental Vehicle and Systems
Figure 8 shows the appearance of the experimental vehicle. This vehicle was equipped with the proposed system discussed in Section 2.2. Thus, this vehicle could provide proactive braking interventions activated by the foresighted driver model, and display the information via HUD while approaching the target situations. Although the mathematical formula of longitudinal motion control algorithm was same as one proposed in the previous study [7], the parameters were bit updated. The details of the parameter determination were described in our other previous study [9]. Regarding the lateral control, because the system was incapable of maneuvering, the participants maneuvered the steering wheel by themselves. In addition, we logged the original information from control area network (CAN) and additional on-board sensors such as front cameras, LIDAR, GPS, and the midstream information processed by the system, such as digital map position, target control values, and so on. Almost equivalent vehicles were used in all three experimental sites.

Appearance of experimental vehicle
3.4 Experimental Course
The main target situations of the proactive braking intervention system are non-signalized crossings with poor visibility due to roadside structural occlusions. Thus, although there are various driving environments in the real world, we selected some courses which have common characteristics on the above-mentioned point and different characteristics regarding other conditions such as types of coexisting traffic participants and traffic volume among the evaluation sites. Although the findings of this study would be limited by the selection of the evaluation sites, we thought that we could discuss the trends of acceptability and driving environmental dependencies to a certain degree. To be more precise, we collected the experimental data in three evaluation sites: The Koganei, Kashiwa, and Atsugi areas. Koganei is one of the cities in Tokyo, which is the capital of Japan. Because Koganei is very close to the center of Tokyo, Koganei has very tight residential areas. Kashiwa is one of cities in Chiba prefecture, which borders Tokyo. Because Kashiwa is also relatively close to the center of Tokyo, Kashiwa has the characteristics of Tokyo commuter towns. Therefore, Kashiwa has relatively tight residential areas. Atsugi is one of cities in Kanagawa prefecture, which also borders Tokyo. In contrast to Kashiwa, Atsugi is relatively distant from Tokyo. Thus, the city of Atsugi is sparser than the other two areas. As mentioned above, because the city characteristics seemed different from each other, we intended to collect the experimental data from such cities.
Figure 9 shows the experimental course in the Koganei area. This figure and following similar figures are based on the map images published by the Geospatial Information Authority of Japan [19], and we added some information, such as regulated speed, the links, and intervention positions. The orange areas indicate the positions of structures such as houses, buildings, and factories. This course consists of seven links labeled L1–L7. The link colors indicate the regulated speed; a red line for 20 km/h limit, green line for 30 km/h limit, blue line for 40 km/h limit, and black line for 60 km/h limit, which is the maximum velocity on non-highway roads in Japan. The total course length is approximately 3.7 km. We selected this course considering the following points.
-
The course should contain several non-signalized crossings, and stop lines where the cars must stop.
-
The time required to complete the course should be less than approximately 20 min for making the experimental participants not forget the details of each trial.
-
The course should not contain excessively dangerous crossings.
-
The course should reflect the characteristics of the evaluation area.

Experimental course at Koganei area
As for the fourth point, because Koganei area had the characteristics of very tight residential areas, we selected this course which included such characteristics. For the course selection of Kashiwa area and Atsugi area described in the following parts, we considered the above-mentioned points. Table 2 shows the characteristics of each link at the Koganei area. In this course, we set four crossings labeled C1 to C4 where the proactive braking interventions for blind crossings were activated, and two stop lines labeled S1 to S2 where those for stop lines were activated. We selected these intervention points considering the following points.
-
The visibility around the intervention point should be poor.
-
The risk of rea-end collision should be small when the system intervened the braking operation.
For the selection of intervention points in Kashiwa area and Atsugi area described in the following parts, we considered basically the same points. Table 3 shows the target Vmin for each crossing. These values were determined considering the road width and the existence of road shoulders in each situation. In the Koganei area, the experiences of the proactive braking intervention while overtaking parked cars were not safe because parked cars were located at the relatively large roads where the traffic volume was relatively large. Thus, we considered that the experiments regarding the proactive braking intervention while overtaking parked cars were difficult in the Koganei area. Therefore, we did not set the areas for the proactive braking intervention around the parked cars, unlike the other evaluation sites.
Figure 10 shows the experimental course in the Kashiwa area. Because Kashiwa area had the characteristics of commuter towns, we selected this course which included such characteristics. This course consists of 12 links labeled L1–L12. The total course length is approximately 4.6 km. Table 4 shows the characteristics of each link in the Kashiwa area. In this course, we set seven crossings labeled C1–C7 where the proactive braking interventions for blind crossings were activated, and five stop lines labeled S1 to S5 where those for stop lines were activated. Table 5 shows the target Vmin for each crossing. Because some parts of L6, L8, and L11 were relatively safe situations, we set these areas for the proactive braking intervention while overtaking parked cars. To be more precise, if there was a parked car in these areas when the participants experienced the proposed system, it executed the proactive braking for the occluded areas due to the parked car. However, because we did not prepare the parked cars ourselves, the proposed system targeted only on the parked cars that were incidentally located in the areas. Thus, such proactive braking for a parked car was a rare case.

Experimental course at Kashiwa area
Figure 11 shows the experimental course in the Atsugi area. Because Atsugi area was sparser town than other two areas, we selected this course which included such characteristics. This course consists of 11 links labeled L1–L11. The total course length is approximately 6.1 km. Table 6 shows the characteristics of each link at the Atsugi area. As for L3, L4, and L10, the regulated speed was 60 km/h although they were not very large roads. This was not because high velocity was allowed due to the width of them, but because they were not regulated due to their triviality. In this course, we set four crossings labeled C1–C4 where the proactive braking interventions for blind crossings were activated, and two stop lines labeled S1 to S2 where those for stop lines were activated. Table 7 shows the target Vmin for each crossing. Similar to the Kashiwa area, we set the areas for the proactive braking intervention while overtaking parked cars in L4. However, because the situations where the other cars were parked in the area were very rare, the system rarely executed the proactive braking intervention for the parked cars.

Experimental course at Atsugi area
3.5 Experimental Procedure
Figure 12 summarizes the experimental procedure flow. The main experimental parts were divided into two days for each participant. The Day 2 experiment was conducted 1 week after the Day 1 experiment. Before Day 1, participants answered preliminary questionnaires that asked about themselves. On Day 1, we first explained to the participants about the experiments and obtained their informed consent. Next, they drove the experimental vehicle twice on the course without the proposed system. Subsequently, we explained the details about the system behaviors during braking intervention. After that, they drove the vehicle once with the proposed system. On Day 2, they first answered the TMT-J which evaluated their ability regarding perception and recognition. The TMT-J details will be described in the following section. Next, they drove the experimental vehicle twice with the proposed system. Subsequently, they answered Questionnaire 1, which asked about the reactive factors of the system. We asked such questions at the time because we wanted them to recall the temporary feeling. After that, they drove the experimental vehicle once without the proposed system. Finally, they answered Questionnaires 2, which asked about the other factors of the proposed system.

Flow of experimental procedure
3.6 Experimental Instructions
We gave the following instructions to the participants before the experiment.
-
The participants will experience the two types of braking support system.
-
The 1st one operates at potentially dangerous situations around blind crossings and parked vehicles where pedestrians or cyclists might rush out from the occluded area. In such situations, the system decelerates to the desired velocity to maintain safety.
-
The 2nd one operates at stop lines where the vehicle needs to stop. In such situations, the system decelerates to not overrun the stop line.
-
The system function is not autonomous driving but only provides driving support to the participants. Thus, braking operations by the participants are also necessary.
-
The participants can drive as they prefer although the participant should follow the traffic regulations.
3.7 Questionnaires
We used three types of questionnaires in this experiment. The first questionnaires were original ones which asked about the basic participant characteristics, such as age, average driving frequency, and so on. The main results of these questions are summarized in Table 1.
The second questionnaires were existing ones which evaluated the characteristics of the participants. To be more precise, we used TMT-J [20], which is a Japanese version of the Trail Making Test [21], for evaluating the total ability regarding perception and recognition, DSQ [22] for evaluating the driving style via 18 questions, and WSQ [23] for evaluating the workload sensitivity via 38 questions. DSQ and WSQ were tested before Day 1 as a preliminary questionnaire. The TMT-J consists of two parts: Part A and Part B. Figures 13 and 14 show the test sheet examples of Part A and Part B, respectively. These figures are only examples for explaining the tasks, and we used commercial ones in actuality. In the case of Part A, the participants draw lines connecting 25 circles with the numbers from 1 to 25 in a sequential order. In contrast, in the case of Part B, the participants draw lines connecting 13 circles with numbers and 12 circles with Japanese characters alternately. We measured the number of mistakes and the time to complete the task. Based on the combination of both criteria, we evaluated the ability of the participants.

Example of TMT-J Part A test sheet

Example of TMT-J Part B test sheet
The third questionnaires were original ones which asked about the various characteristics of the experienced system. The topics were based on the previous studies findings [14, 16, 17]. To be more precise, we asked about the following topics.
-
Reactive factors
-
-
To what degree did you feel interference with your driving from the support system at occluded crossings?
-
-
-
To what degree did you feel interference with your driving from the support system at stop lines?
-
-
-
To what degree did you feel anxiety for the support system at occluded crossings?
-
-
-
To what degree did you feel anxiety for the support system at stop lines?
-
-
-
To what degree did you feel strangeness for the support system at occluded crossings?
-
-
-
To what degree did you feel strangeness for the support system at stop lines?
-
-
Comprehensive factors
-
-
To what degree did you feel that the support system reduced your driving burden?
-
-
-
To what degree did you feel that you could drive safely owing to the support system?
-
-
Reflective factors
-
-
To what degree did you feel that the support system is necessary for elderly drivers in Japanese society?
-
-
-
To what degree did you feel that the support system is currently necessary for you?
-
-
-
To what degree did you feel that the support system would be necessary for you after five years?
-
-
Total acceptability
-
-
To what degree did you want to introduce the support system into your own vehicle?
-
The participants answered the questionnaire based on a grade scale of 1–6. The following shows the description of each grade.
-
Grade 1: The participants felt very much.
-
Grade 2: The participants felt so.
-
Grade 3: The participants felt a little.
-
Grade 4: The participants did not feel so much.
-
Grade 5: The participants did not feel.
-
Grade 6: The participants did not feel at all.
3.8 Statistical Analysis Methods
In this study, we aimed to compare the results of questionnaires among evaluation sites. Thus, the number of comparison target was three. In addition, comparison targets were equivalent from each other, and there was no control group. Therefore, first, we compared the three groups for each analysis. Then, if the significant differences under the 5% significance level were confirmed, we conducted pairwise comparisons for confirming which pair had the significant differences. The detailed methods of these statistical analyses depend on the characteristics of questionnaires. The characteristics of questionnaires in this study were classified into three as follows form the viewpoints of statistical analysis methods.
-
1.
Unpaired-samples comparison of non-parametric scales among three areas.
-
2.
Unpaired-samples comparison of parametric scales among three areas.
-
3.
Paired-samples comparison of non-parametric scales among three questionnaires.
Analyses of TMT-J and large part of original questionnaires were classified into the first case. In this case, we used the Kruskal–Wallis test as the comparison among three groups. Then, if we confirmed significant differences under the 5% significance level, we used the Steel–Dwass test as pairwise comparisons. Analyses of DSQ and WSQ were classified into the second case. In this case, we used the one-way ANOVA as the comparison among three groups. Then, if we confirmed significant differences under the 5% significance level, we used the Tukey–Kramer test as pairwise comparisons. The comparisons between some questionnaires, which will be described in the Section 4.3.2, were classified into the third case. In this case, we used the Friedman’s test as the comparison among three groups. Then, if we confirmed significant differences under the 5% significance level, we used the Steel–Dwass test as pairwise comparisons.
4 Analyses
4.1 Analyses of Traffic Environments
4.1.1 Analysis Procedure
To define the driving environmental characteristics of each evaluation site, we analyzed the time-series image data via the front camera of the experimental vehicle. Because our system targeted on accident prevention with pedestrians, coexisting pedestrians with the possibility of colliding with the vehicle are an important factor to discuss the system acceptability. In addition, because the proposed system intervenes with braking operations, which controls the velocity, traffic flow on the road is also an important factor. Thus, we visually analyze the collected data from the viewpoint of these factors.
As for the coexisting pedestrians, we visually counted the number of pedestrians which the experimental vehicle overtook or passed by. Because the pedestrians with no possibility of colliding with the vehicle were not important, we counted only those having a collision possibility, as shown in Fig. 15. As for the road with a center line, we counted only the pedestrians on the near side of the center line. As for the road without center lines, we counted the pedestrians on the both sides. As for the road with pedestrian isolation areas, we counted the pedestrians only in the area with road paint such as white lines, and not any area with physical barriers such as crash barriers and curbs.

Rules for counting the coexisting pedestrians
As for the traffic flow, although a fixed-point observation to count the number of the vehicles on the experimental course was ideal, it needed too much additional data and took a lot of time and human resources. Thus, as a simplified method, we counted the number of oncoming vehicles instead.
Furthermore, because the weather conditions might affect the encounter ratio of the coexisting traffic participants, we analyzed only the data collected on sunny and cloudy days. As a result, the driving data numbers for analyzing the traffic environmental characteristics were 371 for the Koganei area, 308 for the Kashiwa area, and 139 for the Atsugi area. These data included the driving data for both with and without the proposed system. In addition, the aim of the analyses in this section was not the participant evaluation but the traffic environmental evaluation. Thus, for the Atsugi area, because larger data numbers were better for the traffic environmental analyses, we analyzed not only the data from the 14 participants included in Section 3.2, but also the data from the 13 participants who were excluded from Section 3.2, for a total of 27 participants.
4.1.2 Analysis Results at Each Evaluation Site
Figure 16 shows the encounter ratios with pedestrians and oncoming vehicles in the Koganei area. Each mark with a number such as “L1” indicates the combination of the encounter ratios in the corresponding link. The circle symbols indicate the links where no braking intervention was conducted. The upward triangle symbols indicate the links where braking interventions were conducted at occluded crossings. The downward triangle symbols indicate the links where braking interventions were conducted at stop lines. The star-shaped symbols indicate the combination of upward and downward triangles, which indicate the links where braking interventions were conducted at both occluded crossings and stop lines. Although we wanted to express the results distributed in a wide range using the double logarithmic charts to grasp the general outlines, the numbers of coexisting pedestrians and oncoming vehicles were zero in some links. Because we could not express zero in the double logarithmic chart, we put such data on the axis for descriptive purposes. For example, as shown in Fig. 16, the encounter ratio with oncoming vehicles at L7 in the Koganei area was 0.0.

Encounter ratio with pedestrians and oncoming vehicles in the Koganei area
As for the results in the Koganei area, we confirmed two distributed groups. The Distribution A shown in the figure includes the results of L1, L3, L5, and L6. As shown in the figure, the encounter ratios with the oncoming vehicle at these links are relatively large although those with pedestrians vary. The common point of these links in the real world is that these links are relatively large roads. On the contrary, the Distribution B shown in the figure includes the remaining results. As shown in the figure, the encounter ratios with the pedestrians at these links are relatively large although those with the oncoming vehicles vary. The common point of these links is that they are community roads at residential areas. Thus, the characteristics of the Koganei area are that it has two kinds of roads and the characteristics of them are clearly different from each other. Therefore, we consider that the drivers in the Koganei area need to adjust their driving modes to adapt to the situations.
Figure 17 shows the encounter ratios in the Kashiwa area. Similar to the Koganei area, we confirm two distributed groups, although the gap between distributions is not as clear as that in the Koganei area. The Distribution A shown in the figure includes the results of L1, L2, L3, L11, and L12, while the Distribution B includes the remaining results. As shown in the figure, the encounter ratios with oncoming vehicle are not as large as those in the Koganei area. The primary different point between distributions in the Kashiwa area is the encounter ratio with the pedestrians. The common point of links in the Distribution A is the road at non-residential areas while that in the Distribution B is the community road at residential areas. The Kashiwa area characteristics are that the gap between the distribution of the roads at the non-residential area and that at the residential area is relatively small. We consider that the characteristics as a commuter town are reflected in these results.

Encounter ratio with pedestrians and oncoming vehicles in the Kashiwa area
Figure 18 shows the encounter ratios in the Atsugi area. We confirmed two distributed groups and two links isolated from other links. The Distribution A shown in the figure includes the results of L1, L2, L6, L8, L9, and L11. As shown in the figure, the encounter ratios with the oncoming vehicle at these links are relatively large while the encounter ratios with pedestrians are small. The common point of these links in the real world is that these links are relatively large roads. On the contrary, the Distribution B includes the results of L3, L4, and L10. As shown in the figure, the encounter ratio with the pedestrians at these links is relatively large in the Atsugi area although it is not as large as those in the other areas. The common point of these links is that these links are relatively small. Actually, L3 and L4 are the roads in paddy fields, and L10 is a minor road. Thus, the characteristics of the Atsugi area is that large roads account for the primary portion. We consider that the characteristics as a provincial city are reflected in these results.

Encounter ratio with pedestrians and oncoming vehicles in the Atsugi area
As discussed above, we considered that the driving environmental characteristics were different from each other. Based on these results as a premise, we proceeded with the following analyses.
4.2 Characteristics of Experimental Participants
4.2.1 Evaluation Result of TMT-J
Each part of the TMT-J classifies the participants into three categories: Normal, border, and abnormal. The criteria are the time to complete the task, and the number of mistakes during the tasks. Tables 8 and 9, which we translated from the original [20], show the criteria for the TMT-J Part A and Part B. Because the TMT-J Part B is more difficult than Part A due to the alternate connection between numbers and characters, a threshold value for allowable number of mistakes are different. As for the threshold values for allowable time, the Brain Function Test Committee of Japan Society for Higher Brain Dysfunction [20] indicates the average time and standard deviation for ages of 60 s, 70 s, and 80 s. As for the participants whose age was 60 s, because we recruited elderly drivers whose age was equal to or more than 65, applying the threshold values for 60 s to them might result in an extreme underestimation of their ability from a viewpoint of the group. Thus, as representative values, we applied the threshold values for 70 s to all participants. Therefore, the following analyses discuss to what degree the ability of participants in these experiments were based on a 70 s threshold value. In addition, the Parts A and B results were independently evaluated. To grasp the general trends, we adopted the worse result in both results. For example, if results of a certain participant were “border” for Part A and “normal” for Part B, we considered the result of the participant as “border.”
Table 10 summarizes the evaluation results of the TMT-J. Approximately 80% of the participants show the normal results. We considered these results as unpaired non-parametric data among the evaluation sites, and conducted statistical analysis. The Kruskal–Wallis test revealed that there are not statistically significant differences between these participants among the sites under a 5% significance level. Therefore, we considered that there were not so much differences in the participants among the evaluation sites from the ability viewpoints regarding perception and recognition.
4.2.2 DSQ Evaluation Result
Figure 19 shows the DSQ evaluation results at each evaluation site. One-way ANOVA revealed that there are statistically significant differences among the average values regarding the “preparatory maneuvers at traffic signals” under a 5% significance level. In addition, the Tukey–Kramer test revealed that there is a statistically significant difference between the average values of the Koganei area and that of the Atsugi area. To be more precise, the point regarding “preparatory maneuvers at traffic signals” of the participants of the Atsugi area is smaller than that of the Koganei area. On this point, because the participants around the Atsugi area may drive on large roads more frequently than the participants in the Koganei area and the interval of traffic signals that the Atsugi area participants experienced daily may be longer than that of the Koganei area; thus, it may lead to this result. For other items, we did not confirm significant differences under a 5% significance level among the evaluation sites. In this way, the differences in the DSQ evaluation results among the evaluation sites could be interpreted by the effect of differences of driving environmental characteristics.

Comparison of DSQ results
4.2.3 WSQ Evaluation Result
Figure 20 shows the WSQ evaluation results at each evaluation site. One-way ANOVA revealed that there are statistically significant differences among the average values regarding the “tendency to become distracted while driving (DD)”, “physical pain/ discomfort (PP)”, and “comprehension of driving route (DR)” under a 5% significance level. As for “DD”, the Tukey–Kramer test revealed that there is a statistically significant difference between the average values of the Koganei area and that of the Atsugi area. To be more precise, the workload sensitivity regarding “DD” of the participants of the Koganei area is smaller than that of the Atsugi area. On this point, because the participants in the Koganei area drive their vehicle in an environment where more pedestrians coexist as shown in Fig. 16, they might have more tolerance for driving in a high workload driving environment. As for “PP”, the Tukey–Kramer test revealed that there are statistically significant differences between the average values of the Koganei area and the Atsugi area, and also between those of the Kashiwa area and the Atsugi area. To be more precise, the workload sensitivity regarding “PP” of the Atsugi area participants is smaller than that of the Koganei and Kashiwa areas. On this point, because the Atsugi area participants drive the vehicle more frequently than those in the other areas as listed in Table 1, they may have a tolerance regarding the “PP”. Moreover, because the average age of the Atsugi area participants is slightly lower than that of the other areas as listed in Table 1, that also may affect the result. As for “DR”, although One-way ANOVA indicated a significant difference, the Tukey–Kramer test did not reveal any significant difference. On this point, One-way ANOVA might react to the relation between the Koganei and Atsugi area results. Because road networks of the Koganei area is relatively complicated due to many narrow roads, that may affect the result. For other items, we did not confirm significant differences under a 5% significance level among the evaluation sites. In this way, the large parts of the differences in the WSQ evaluation results among the evaluation sites could be interpreted by the effect of differences of driving environmental characteristics.

Comparison of WSQ results
4.3 Comparisons of Acceptability via Questionnaires
4.3.1 Evaluation of Reactive Factors
Figures 21 and 22 show the evaluation results of feeling interference from the support system at occluded crossings and stop lines, respectively. In these cases, “the participants felt very much” means a strong negative evaluation that the participants felt interference from the system. As a general trend, the results of the Koganei, Kashiwa, and Atsugi areas show almost balanced, slightly negative, and slightly positive evaluations, respectively. As for the occluded crossing results, the Kruskal–Wallis test revealed that there are statistically significant differences among the results under a 5% significance level. In addition, the Steel–Dwass test revealed that there are statistically significant differences between the results of the Kashiwa and Koganei areas, and between those of the Kashiwa and Atsugi areas. As for the stop lines results, the Kruskal–Wallis test revealed the significance differences, and the Steel–Dwass test revealed a significant difference between the results of the Kashiwa and Atsugi areas. On these statistical results, we considered that the experimental conditions might affect the results. The Kashiwa area had a larger number of the crossings and stop lines where the proactive braking interventions were conducted than the other two evaluation sites. In addition, because some of such target situations were located closely to each other, the Kashiwa area participants experienced braking intervention numerous times in a short period. Thus, the Kashiwa area participants might feel more interference than those of the other evaluation sites. Although the direct reason of these results were experimental conditions, we considered that these experimental conditions were affected indirectly by the urban characteristics. Thus, we considered that these results might depend on the driving environmental characteristics.

Comparison of feeling interference from the support system at occluded crossings

Comparison of feeling interference from the support system at stop lines
Figures 23 and 24 show the evaluation results of feeling anxiety from the support system at occluded crossings and stop lines, respectively. As for the data of the Kashiwa area regarding the stop lines, one participant missed answering the question. Thus, the number of the answers for the Kashiwa area was 64. As a general trend, a large portion of participants at all evaluation sites showed positive evaluations that they did not feel any anxiety from the support system. In addition, the Kruskal–Wallis test revealed that there are not statistically significant differences among the results under a 5% significance level for both comparisons. On these results, we considered that the HUD for explaining the proactive braking intervention activation prevented the participants from feeling anxiety.

Comparison of feeling anxiety for the support system at occluded crossings

Comparison of feeling anxiety for the support system at stop lines
Figures 25 and 26 show the evaluation results of strangeness feelings from the support system at occluded crossings and stop lines, respectively. Similar to the anxiety case, one Kashiwa area participant missed answering the question regarding the stop lines. Thus, the number of the Kashiwa area answers was also 64. Similar to the feeling interference case, the results of the Koganei, Kashiwa, and Atsugi areas show almost balanced, slightly negative evaluations, and slightly positive evaluations, respectively. As for the occluded crossings, the Kruskal–Wallis test revealed that there are not statistically significant differences among the results under a 5% significance level. On the contrary, as for the stop lines, although the Kruskal–Wallis test indicates that there are statistically significant differences among the results under a 5% significance level, the Steel–Dwass test does not reveal any significant differences. On this point, the Kruskal–Wallis test may react to the relation between the Kashiwa and Atsugi area results. Regarding the differences of the balance between the positive and negative evaluations for the feeling of strangeness among the evaluations sites, we considered that the characteristics of driving environments might affect the evaluation results. As for the stop lines S1 and S2 of the Koganei area, and S2 of the Atsugi area, the stop lines were located around the intersections where the road priority was evincive due to the differences of the road width. On the other hand, because some target stop lines of the Kashiwa area were located on community roads, the road priority around them at Kashiwa area was not clear; further, such an unclear priority might result in lack of feeling for the necessity to stop at the crossings. Thus, we considered that such situations might result in more feeling of strangeness at the Kashiwa area than at other evaluation areas. In this way, similar to the feeling interference case, we considered that these results might depend on the driving environmental characteristics.

Comparison of strangeness feeling for the support system at occluded crossings

Comparison of strangeness feeling for the support system at stop lines
4.3.2 Evaluation of Comprehensive Factors
Figure 27 shows the evaluation results of a driving burden reduction feeling owing to the support system. In these cases, “the participants felt very much” means a strong positive evaluation that the participants could reduce the driving burden owing to the system. As a general trend, a large portion of the participants at all evaluation sites answered that they felt a burden reduction owing to the support system. As for the statistical analyses, although the Kruskal–Wallis test indicates that there are statistically significant differences among the results under a 5% significance level, the Steel–Dwass test does not reveal any significant differences. The Kruskal–Wallis test may react to the relation between the Koganei and Kashiwa area results. On this point, we consider that the driving difficulties might affect the evaluation results. As discussed in Sections 4.1 and 4.2, because there were many coexisting traffic participants on the Koganei area road, the driving workload might be higher than other evaluation sites. Thus, although the proposed system could reduce the burden related to pedestrians rushing from occluded areas, there may still be other difficulties while driving in the Koganei area unlike other evaluation sites. We consider that such differences might be the reason for the abovementioned statistical results. However, although the Kruskal–Wallis test revealed statistically significant differences among the evaluations results, the evaluation results are not balanced, consisting of both positive and negative evaluations, but as a whole positive. Therefore, we consider that the proposed system was positively evaluated from this viewpoint.

Comparison of driving burden reduction feeling owing to the support system
Figure 28 shows the evaluation results of a safe driving feeling owing to the support system. Similar to the burden reduction feeling, a large portion of the participants at all evaluation sites answered that they could drive more safely owing to the support system. The Kruskal–Wallis test reveals that there are not statistically significant differences among the results under a 5% significance level. From these results, we considered that the participants felt benefits from the proposed system.

Comparison of safe driving feeling owing to the support system
4.3.3 Evaluation of Reflective Factors
Figures 29, 30, and 31 show the evaluation results of the support system necessity for elderly drivers in Japanese society, for themselves currently, and for themselves after 5 years, respectively. As a general trend, the evaluation differences among the questions seem larger than those among the evaluation sites for the same question. Actually, for each comparison of the same question, the Kruskal–Wallis test does not indicate significant differences among the results under a 5% significance level. Thus, on these points, we considered that there were not differences among the evaluation sites. Therefore, we considered that the participants of each evaluation site were equivalent regarding these factors, and compared the answers between the questions. Figure 32 shows the comparison results of answers regarding a feeling of necessity. The total number of the answers for each question is 146. The Friedman's test indicates that there are statistically significant differences among the answers under a 5% significance level. In addition, the Steel–Dwass test reveals significant difference between the answers regarding elderly drivers in Japanese society and those regarding themselves currently, and between those regarding the themselves currently and those regarding themselves after 5 years. These results indicate the following trends.
-
A large portion of participants considered that they had better driving abilities than other elderly drivers in Japanese society.
-
A large portion of participants was conscious that their driving abilities would decline due to their further aging, at least within the next 5 years.
-
A large portion of participants considered that the proposed system would compensate such driving ability declines.
-
Therefore, a large portion of participants considered that the necessity for the proposed system would increase.

Comparison of feeling necessity for the support system for elderly drivers in Japanese society

Comparison of feeling necessity for the support system for themselves currently

Comparison of feeling necessity for the support system for themselves after five years

Comparison of answers regarding the feeling of necessity
4.3.4 Evaluation of Desire to Introduce the system
Figure 33 shows the evaluation results of a desire to introduce the support system into their own vehicle. In these cases, “the participants felt very much” means a strong positive evaluation that the participants want to introduce the proposed system into their own vehicle. As a general trend, more than half of the participants at all evaluation sites answered that they want to introduce the proposed system into their own vehicle. The Kruskal–Wallis test reveals that there are not statistically significant differences among the results under a 5% significance level.

Comparison of a desire to introduce the support system into their own vehicle
4.4 Discussions Based on Summary of Comparisons Among Evaluations Sites
As discussed in Section 2.4, the primary intention of this study was the discussion regarding the generalities of acceptability of the proposed system and driving environmental dependencies. Thus, we analyzed the driving environmental characteristics, and driver characteristics of the participants as premises for discussing the generalities and dependencies. To be more precise, first, the analyses of the driving environmental characteristics where FOT data were collected indicated that the evaluation sites in this study had different characteristics from each other in the context of encounter ratios with coexisting traffic participants. Next, the driver characteristics analyses indicated that the participants were considered almost equivalent among the evaluation sites although a few topics showed some statistical differences. In addition, large parts of such differences regarding the driver characteristics among the evaluation sites could be interpreted by the effect of differences of driving environmental characteristics. In this way, because we considered that the participants were nearly equivalent among the evaluation sites except in terms of the effect of driving environmental characteristics, we considered that the driving environmental differences became the primary cause that affected each acceptability factor of the proposed system if there were some evaluation differences among the evaluation sites.
Table 11 summarizes the comparison results of questionnaire answers among the evaluation sites. From the statistical analysis viewpoints, we confirmed that there were statistically significant differences regarding some reactive factors among the evaluation sites, and that there were not statistically significant differences regarding comprehensive factors, reflective factors, and total evaluations among the evaluation sites. Thus, as discussed above, we considered that evaluations regarding the reactive factors depended on the driving environmental differences. Because such dependencies will be solved by the adaptation to various driving environments, we consider that further system implementation developments for the adaptation are necessary on a continuing basis. For example, the following approaches seem effective for evaluation improvements regarding the reactive factors such as feelings of interference and strangeness. As for the former, in our previous study [18], we constructed the prototype system of adaptive proactive braking intervention based on a risk map, and confirmed the effectiveness for improving the evaluations regarding the reactive factors to a certain degree.
-
Adaptation of Vmin based on the road characteristics.
-
Development of adaptive information provision devices explaining the detailed situations regarding the cross roads and intervention reasons.
Conversely, we did not confirm any statistically significant differences among the evaluation sites for the comprehensive factors, reflective factors, and total acceptability. Thus, we consider that the proposed system main concept was positively evaluated in common. In short, we confirmed the generalities of the acceptability regarding the main concept of the proposed system at least in the range of this study.
5 Conclusions
To discuss the generalities of the acceptability of the proactive braking intervention system, we conducted field operation tests, where a total of 146 elderly drives participated at three evaluations sites. The collected FOT data analyses showed the following though these results were limited in the characteristics of driving environment discussed in this study.
-
The driving environmental characteristics were different from each other among the evaluation sites.
-
The driver characteristics of experimental participants were considered almost equivalent among the sites except in terms of the effect of driving environmental characteristics.
-
We considered that reactive factors of the acceptability depended on the driving environmental characteristics because there were statistically significant differences regarding some of the reactive factors among the sites.
-
We confirmed the generalities that the main concept of the proposed system was positively evaluated independently of the driving environmental characteristics because there were not statistically significant differences regarding other factors.
In the future plan, we will analyze the behavioral details of individual participants and interactions with the proposed system from the time-series data. In addition, analysis regarding driving-behavior changes of the participants between before and after experiencing the proposed system is another necessary discussion.
Change history
03 February 2022
A Correction to this paper has been published: https://doi.org/10.1007/s13177-021-00285-y
References
Cabinet Office, Annual Report on the Aging Society [Summary] FY 2019. https://www8.cao.go.jp/kourei/english/annualreport/2019/pdf/2019.pdf. Accessed 17 Apr 2020
Cabinet Office, FY 2018 Situation of Road Traffic Accidents and Current State of Traffic Safety Measures, http://www8.cao.go.jp/koutu/taisaku/h29kou_haku/english/wp2017-pdf.html. Accessed 17 Apr 2020
Inoue, H., Raksincharoensak, P., Inoue, S.: Intelligent driving system for safer automobiles. Journal of Information Processing 25, 32–43 (2017)
Akamatsu, M.: Handbook of Automotive Human Factors, pp. 17–18. CRC Press, Boca Raton (2019)
Institute for Traffic Accident Research and Data Analysis, ITARDA INFORMATION, No. 119 (2016), (accessed on 17 April, 2020). (in Japanese)
Masao, F.: The latest trend of v2x driver assistance systems in Japan. Comput. Netw. 55, 3134–3141 (2011)
Saito, Y., Raksincharoensak, P.: Shared control in risk predictive braking maneuver for preventing collisions with pedestrians. IEEE Transactions on Intelligent Vehicles 1(4), 314–324 (2016)
Ito, T., Mio, M., Tohriyama, K., Kamata, M.: Novel map platform based on primitive elements of traffic environments for automated driving technologies. International Journal of Automotive Engineering 7(4), 143–151 (2016)
Saito, Y., Yoshimi, R., Kume, S., Imai, M., Yamasaki, A., Ito, T., Inoue, S., Shimizu, T., Nagai, M., Inoue, H., Raksincharoensak, P.: Effects of a driver assistance system with foresighted deceleration control on the driving performance of elderly and younger drivers. Transport. Res. F: Traffic Psychol. Behav. 77, 221–235 (2021)
Ito, T., Shino, T., Kamata, M.: Information sharing to improve understanding of proactive braking intervention for elderly drivers. Int. J. Intell. Transp. Syst. Res. 16(3), 173–186 (2018)
Ito, T., Shino, T., Kamata, M.: Information Sharing to Improve Understanding of Proactive Steering Intervention for Elderly Drivers. Int. J. Intell. Transp. Syst. Res. 17(1), 18–31 (2019)
Ito, T., Shino, T., Kamata, M.: Effectiveness of Information Sharing to Improve Elderly Drivers’ Acceptability for Proactive Intervention Systems. International journal of automotive engineering 10(1), 55–64 (2019)
Kessler, C., Etemad, A., Alessandretti, G., Heinig, K., Selpi, R., Brouwer, A., Cserpinszky, W., Hagleitner, M. Benmimoun, SP1 D11.3 Final Report. https://www.eurofot-ip.eu/download/library/deliverables/eurofotsp120121212v11dld113_final_report.pdf. Accessed 21 Apr 2020
Ito, T., Shino, T., Kamata, M.: Initial investigation of elderly drivers’ acceptability for proactive intervention by intelligent vehicle. Int. J. Intell. Transp. Syst. Res. 16(1), 51–65 (2018)
Inoue, S., Saito, Y., Yamasaki, A., Kinoshita, T., Sato, F., Ito, T., Shimizu, T., Saito, S., Uchida, N., Inoue, H., Pongsathorn, R.: Risk Predictive Steering Driver Assistance System Based on Shared Ratio between Human and Machine. Transactions of Society of Automotive Engineers of Japan 50(6), 1646–1652 (2019). (in Japanese)
Ito, T., Soya, M., Nakamura, S., Saito, S., Uchida, N., Kamata, M.: Acceptability of a Proactive Braking Intervention System by Elderly Drivers Using an Actual Vehicle. International Journal of Automotive Engineering 9(4), 186–194 (2018)
Matsumi, R., Oya, K., Ito, T., Saito, Y., Mio, M., Hashimoto, N., Nagai, M., Inoue, H., Kamata, M.: Acceptability Investigation of Proactive Braking Intervention for Elderly Drivers on Community Roads. Transactions of Society of Automotive Engineers of Japan 50(3), 911–917 (2019). (in Japanese)
Ito, T., Soya, M., Tohriyama, K., Saito, Y., Shimizu, T., Yamasaki, A., Nagai, M., Inoue, H., Kamata, M.: Evaluation of Acceptability of Adaptive Proactive Braking Intervention System Based on Risk Map for Elderly Drivers. International Journal of Automotive Engineering 11(2), 40–48 (2020)
Geospatial Information Authority of Japan: GSI Maps (online), https://maps.gsi.go.jp/, (accessed on 2020–03–22).
Brain Function Test Committee of Japan Society for Higher Brain Dysfunction, Trail Making Test Japanese edition (TMT-J), Shinkoh Igaku Shuppan Co. Ltd., (2019). (in Japanese)
Armitage, S.G.: An analysis of certain psychological tests used for the evaluation of brain injury. Psychol. Monogr. 60(1), 1–48 (1946)
Ishibashi, M., Okuwa, M., Doi, S., Akamatsu, M.: Indices for Characterizing Driving Style and their Relevance to Car Following Behavior. Proceedings of SICE Annual Conference 2007, 1132–1137 (2007)
Ishibashi, M., Okuwa, M., Doi, S., Akamatsu, M.: Characterizing Indices of Driver’s Workload Sensitivity and their Relevance to Route Choice Preferences. Transactions of Society of Automotive Engineers of Japan 39(5), 169–174 (2008). (in Japanese)
Acknowledgements
This research has been conducted as a part of the research project “Autonomous Driving System to Enhance Safe and Secured Traffic Society for Elderly Drivers” granted by Japan Science and Technology Agency(JST), Strategic Promotion of Innovative Research and Development.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ito, T., Matsumi, R., Saito, Y. et al. Comparison of Proactive Braking Intervention System Acceptability via Field Operation Tests in Different Regions. Int. J. ITS Res. 20, 330–355 (2022). https://doi.org/10.1007/s13177-021-00278-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13177-021-00278-x