
Abstract
In this study, we consider particle-laden flows on an inclined plane under the effect of gravity. Previous experimental works have noted that a particle-rich ridge is generated near the contact line. We investigate the bump structure observed in particle-rich ridges in terms of Lax’s shock waves in the mathematical theory of conservation laws, explicitly considering the effect of particles with nontrivial radii on morphology of particle-laden flows. We also extract the dependence of radius and concentration of particles on the bump structure.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Particle-laden flows comprise fluids including large concentrations of particles playing dominant and considerable roles in dynamics, such as debris flows, slurry transport, and mixed pharmaceuticals (cf. Zhou et al. [14]). In [14], experimental results on the behavior of particle-laden inclined film flows were presented, in which particle-laden flows of polydisperse glass beads (diameter 250–425 \(\mu\)m) were directed down an acrylic plate with fixed, adjustable inclination angles \(\alpha\) (\(0^{\circ }<\alpha <90^{\circ }\)). It was been observed in [14] that particles may behave in three different manners depending on the inclination angle and particle concentration of the flow. (a) At low inclination angles and the particle concentration, particles settle to the substrate and the clear silicone oil flows over the particle bed. (b) At high inclination angles and the particle concentration, particles accumulate near the contact line, forming a particle-rich ridge. (c) At intermediate inclination angles and particle concentrations, particles remain well-mixed in the fluid.
A lubrication model was also derived in [14] to capture the behavior of the particle-rich ridge regime as observed in the ridged regime (b), in which the governing equations of mixture motion was considered. The governing equations are given by the following system of partial differential equations for the particle concentration \(\phi (x, t)\) (\(0\le \phi (x, t) \le \phi _m\)) and the velocity of particle laden \({\varvec{u}}=(u, v).\)
where h(x, t) is the total thickness of particle laden, \({\varvec{g}}= g(\sin \alpha , -\cos \alpha )\) is the acceleration of gravity, p is pressure and \({\varvec{I}}\) is the 2-dimensional identity matrix. \(\mu (\phi )\) is the effective viscosity given by \(\mu (\phi )=\phi _m^2/(\phi _m-\phi )^2\) with the maximum packing fraction \(\phi _m \approx 0.67\). \(\rho (\phi )\) is the effective density given by \(\rho (\phi )= (\rho _p \phi + \rho _f(1-\phi ))\), where \(\rho _f\) and \(\rho _p\) are the densities of the fluid and particulate phases, respectively. The velocity \({\varvec{u}}\) is the average of the two velocities of the fluid and the particle phases, defined as
where \({\varvec{u}}_f\) and \({\varvec{u}}_p\) are the velocities of the fluid and particulate phases, respectively. At the free surface, the normal stress balance and the tangential stress balance are imposed as
where \({\varvec{n}}\) and \({\varvec{t}}\) are the unit outward normal and unit tangential vectors to the free surface, \(\gamma\) is the surface tension of the mixture and independent of particle concentration, and \(\kappa\) is the curvature of the free surface. The boundary condition at the wall is
Note that the governing Eqs. (1)–(4) assume that \(\phi\) is independent of y, which prohibits particles from settling to the substrate. Therefore, these governing equations cannot explain the settling behaviors that occur in the settled regime (a). Cook [1] proposed an equilibrium model based on the balance of the hindered settling and shear-induced migration, which exhibited good agreement with the experimental data in [14] and captured the transition between the well-mixed regime (c) and the settled regime (a). Other experimental results were presented and similar models derived in e.g. [6,7,8, 12, 13].
Cook et al. [2] revisited a lubrication model in [14] with more complete explanations. The lubrication model derived from the governing Eqs. (1)–(4) comprises the following system of conservation laws (see [2, 14]).
where \(F(\phi ) = (1-\phi )^{5.1}\) and \(v_s=\dfrac{2}{3}\dfrac{(\rho _p-\rho _f)}{\rho _f}\left( \dfrac{a}{h_0}\right) ^2\), a is the distance from the center of the particle to the wall and
The term \(v_s h \phi (1-\phi )F(\phi )W(h)\) represents the relative velocity of particles to the fluid incorporating the interference among particles themselves, as well as among particles and the wall. The former is described by \(F(\phi )\), which is known as Richardson-Zaki correction and is valid for high concentration of particles (cf. [8, 9, 14]), whereas the latter is approximately described by W(h) in (6). The function W(h) is introduced in [2, 14] and has the asymptotics
In [2, 14], solutions of (5) with initial jumps in height from the upstream film thickness \(h_L\) to the precursor thickness b and given concentrations on tips and ends, that is
are treated only in the asymptotic case \(W(h) \approx 1\), where \(h_L\), b, \(\phi _{0L}\) and \(\phi _{0R}\) are constants with specified values. In the initial value problem (5) and (8), namely the Riemann problem of (5), numerical solutions have been found with a 1-shock wave from the upstream state \((h_L, \phi _{0L} h_L)\) to an intermediate state \((h_I, \phi _I h_I)\) with height \(h_I\) and concentration \(\phi _I\) slightly larger than \(h_L\) and \(\phi _{0L}\), respectively, and a 2-shock wave from this intermediate state to the precursor \((b, \phi _{0R} b)\). According to their results, the double-shock wave (1-shock and 2-shock) can generate a particle-rich ridge, which forms “a bump", as observed in the ridged regime (b) (see Fig. 1). Despite good agreement with the results of experiments and a simple description of structures, the explicit dependence of several particle characteristics such as radius is not clearly mentioned in these results, which can lead to misunderstandings in interpreting phenomena relating to concrete particle-laden flows.

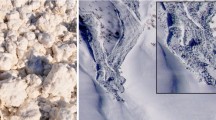
Particle-laden flows on an inclined plane and bump structure. a Diagram of particle-laden flows on an inclined plane. b A particle-laden flow comprising dimethyl silicone oil with kinematic viscosity 10 [St] and density ρf = 0.970 [kg/m3] and glass beads with diameter 300–425 [μm] and density ρp = 2.5 [g/cm3], is shown on an inclined acrylic plate. The generation of bumps is observed at the tips of flows
Our main aim here is to explicate one of these unclear points in detail. In particular, the effect of particles with nontrivial radii on the morphology of particle-laden flows is explicitly considered, which includes the asymptotics (7) in the Riemann problem for (5) with the initial condition (8). We then elucidate the influence of interaction between particles of nontrivial size and the wall on the formation of the particle-rich ridge through the shock structure. The remainder of this study is organized as follows. In Sect. 2, we briefly review a theory of shock waves for the Riemann problem of the system of conservation laws (5) with (8). It is mathematically known that the general \(m\times m\) system of the hyperbolic conservation laws
can admit discontinuous solutions such as shock waves and smooth solutions such as rarefaction waves, where \(U= (U_1,\cdots , U_m)^{\top }\in {\mathbb {R}}^m\), \((x,t)\in {\mathbb {R}}\times {\mathbb {R}}_{+}\), \({\mathbb {R}_+}\equiv [0, +\infty )\) and \(F(U) = (F_1(U),\dots , F_m(U))^{\top }\) is a vector-valued function which is \(C^2\) in some open subset \(D\subset {\mathbb {R}^m}\) (see [5, 11]). To construct a solution with shock waves of the system (5), we consider the case where solutions have discontinuities, and hence we deal with weak solutions mentioned below. Weak solutions consisting of shock waves are constructed by applying mathematical theories established in [5, 11] to the system (5). In Sect. 3, families of weak solutions of (5) are numerically studied. In particular, we focus on the particle-rich ridge from a mathematical perspective. To this end, solutions with bump structure are constructed by means of physically relevant shock waves. We also provide an associated definition of bump structure in terms of shocks. We especially investigate characteristics of the family of solutions with the required structure, such as their range of existence, height, and propagation speed. In the proposed model (5), solutions can depend on the radius a, the explicit contributions of which are overlooked and overestimated in previous studies such as [2, 14], and the concentration \(\phi\) of particles in flows. This work mathematically investigates the qualitative nature of the particle-rich ridge considering nontrivial particle features.
2 Preliminaries from the theory of conservation laws
Here, we apply terminology from the theory of conservation laws to (5) with a brief review. Setting \(n=\phi h\), the system (5) is reformulated to the system of conservation laws for (h, n) as follows.
where
Let
Then, the system (9) can be rewritten in the form
It is well-known that a solution to conservation laws (10) can be discontinuous even if the initial profile is smooth. We therefore consider weak solutions, as defined below.
Definition 1
(e.g. [11]) A bounded measurable function U(x, t) on \({\mathbb {R}} \times {\mathbb {R}_{+}}\) is called a weak solution of the initial-value problem for (10) with bounded and measurable initial data U(x, 0), provided that
holds for all \(\psi \in C_0^1({\mathbb {R}}\times {\mathbb {R}_{+}})\), where \(C^1_0(X)\) is the space of continuously differentiable functions defined on a topological space X with compact supports in X.
If the weak solution U(x, t) exhibits a discontinuity along a curve \(x = x(t)\), the solution U and the curve \(x = x(t)\) must satisfy the Rankine-Hugoniot relation (jump condition)
where \(U_L=U(x(t)\,-\,0, t)\) is the limit of U approaching (x, t) from the left and \(U_R=U(x(t)\,+\,0, t)\) is the limit of U approaching (x, t) from the right, and \(s = \frac{dx}{dt}\) is the propagation speed of x(t). The discontinuity is referred to as a shock wave, or simply a shock, and s is called the shock speed.
We consider the Riemann problem for the conservation laws (9), namely the initial value problem with the following form of initial conditions called the Riemann data.
The Jacobian matrix of F in (10) at U is
where
and their eigenvalues, which are called characteristic fields, of DF(U) are
where
Assuming that \(Q>0\), eigenvalues \(\lambda _j(U)\) \((j=1,2)\) are real-valued and \(\lambda _1(U)<\lambda _2(U)\) holds for any \(U\in \Omega\), where \(\Omega = \{(h,n)\in {\mathbb {R}^2}: 0<h,\,\,0\le n< \phi _m h\}\). The system (9) is called strictly hyperbolic in \(\Omega\) if this condition holds. The right eigenvectors associated with the eigenvalues \(\lambda _j(U)\) are
where \(Z= F_{11}(U) - F_{22}(U)\). To characterize characteristic fields further, the quantities
are calculated for each \(U\in \Omega\). If \(\nabla \lambda _j(U) \cdot r_j(U) \not = 0\) holds in a subset \(N\subset \Omega\), the j-th characteristic field \(\lambda _j(U)\) is called genuinely nonlinear in N, which ensures the existence of solutions of the Riemann problem with the left state \(U_L\) in N and right states close to \(U_L\). We omit the details of the required calculations owing to their length. We remark instead that the genuine nonlinearity of both characteristic fields in regions of our interest in the following arguments may be numerically confirmed. In this case, weak solutions of the Riemann problem consist of at most three constant states \(U_L\), \(U_I\), \(U_R\) followed by either shock or rarefaction waves (e.g. [5, 11]).
In the present work, our interest is restricted to solutions of (9) consisting of discontinuities, namely shocks. As mentioned, discontinuities arising in weak solutions of (10) have constraints determined by the Rankine-Hugoniot relation (12). To calculate such discontinuities for (9), we fix the reference point \(U_L=(h_L, n_L)\) and consider right states \(U_R=U=(h, n)\) solving (12). If a weak solution of (9) includes a jump discontinuity between the left state \(U_L\) and the right state U, then U must satisfy
where
Eliminating s from these equations, we obtain
the graph of which is referred to as the Hugoniot locus. Among solution families in the Hugoniot locus, physically relevant discontinuities additionally require the following k-entropy inequalities \((k=1,2)\) in the sense of Lax (e.g. [11]).
where s is the shock speed
If U satisfies (16) and (17), then U can be connected to \(U_L\) from the right followed by a 1-shock wave. Similarly, U can be connected to \(U_L\) from the right followed by a 2-shock wave, provided U satisfies (16) and (18).
3 Dependence of radius and concentration of particles on bump generation
Our primary concern is the investigation of “bump" structure described by the composite waves of shocks in the following sense.
Definition 2
We say that a weak solution of the Riemann problem (9) with the Riemann data (8) admits a bump structure if the solution consists of three states \(\{(h_L, \phi _L), (h_I, \phi _I), (h_R, \phi _R)\}\) such that
- (B1):
-
the leftmost state \((h_L, \phi _L)\) is connected to an intermediate state \((h_I, \phi _I)\) with \(h_L < h_I\) and \(\phi _L < \phi _I\) followed by a 1-shock with the shock speed \(s_1\), and
- (B2):
-
the state \((h_I, \phi _I)\) is connected to the rightmost state \((h_R, \phi _R)\) with \(h_R < h_I\) and \(\phi _R < \phi _I\) followed by a 2-shock with the shock speed \(s_2 > s_1\).
A schematic illustration of a physical realization of weak solutions with a bump structure is shown in Fig. 2. As mentioned in Introduction, \(h_L\) represents the upstream film flow thickness, and \(h_R\) denotes the precursor thickness.Footnote 1 The requirement for distributions of three individual states includes the existence of bump structureFootnote 2 in the particle-laden flow generated by shock waves. The additional requirement for shock speeds indicates that the bump structure persists in the sense that two shocks do not interact during their evolution over time; otherwise two shocks would collide with each other to create a single shock structure (cf. [11]). For simplicity, we refer to the above structure as a bump structure generated by Lax’s shocks. We do not require any relationships between \(h_L\) and \(h_R\), and \(\phi _L\) and \(\phi _R\), respectively.
Analytic treatments of this problem with concrete data are relatively difficult owing to the complexity of the nonlinearity and eigensystems \(\{\lambda _j(U), r_j(U)\}_{j=1}^2\). Instead, we investigate the structure of weak solutions numerically, particularly shocks. Our objective is then reduced to numerical computations of Hugoniot loci, i.e., solutions of (15), through the fixed left states \((h_L, \phi _L)\), and possibly intermediate states \((h_I, \phi _I)\). As mentioned in the previous section, the pair of functions \((h,n) = (h,\phi h)\) is considered instead of \((h,\phi )\) itself to allow the mathematical theory of conservation laws to be applied directly. (15) includes three unknowns (h, n, s), whereas the system (5) comprises two equations. To ensure unique solvability, we regard one of unknowns as a parameter and compute the loci as 1-parameter families of solutions. In this study, we regard h as a parameter and the remaining unknowns (s, n) as functions of h, which induce the following parameter-dependent zero-finding problem.
where \({\mathbf{x}}\) is a phase variable vector and \({\mathbf{p}} = (p,\mu )\) is a parameter vector consisting of a varying parameter \(p\in {\mathbb {R}}\) and a fixed parameter vector \(\mu \in {\mathbb {R}}^{k-1}\). The integer k denotes the number of parameters, which is given in advance. In the present case, we set
This represents a given left state \((h_p, n_p)\) and the environmental parameters of the system. The nonlinearity G becomes
We then apply the pseudo-arclength continuation method well-established in numerical bifurcation theory (e.g., [3, 4]) to (19) to obtain Hugoniot loci connected to \((h_p, n_p)\). From the definition, the triple \(\{(h_p, n_p), (h, n), s\}\) solving (19) generates a shock with speed s.
To ensure that the triple \(\{(h_p, n_p), (h, n), s\}\) generates a shock in the sense of Lax, we additionally check the entropy conditions (17) and (18). If either (17) or (18) is satisfied, we can conclude that the triple \(\{(h_p, n_p), (h, n), s\}\) generates a 1-shock if (17) is satisfied, and generates a 2-shock if (18) is satisfied, as long as the original system (5) satisfies the strict hyperbolicity in the domain including the chain of loci of interest. See Remark 4 below on the strict hyperbolicity of this problem.
The operations mentioned here are summarized as follows.
-
1.
Fix \((h_p, n_p) = (h_L, n_L)\) and solve (19).
-
2.
For each solution (h, n, s), verify the entropy conditions (17) and (18).
-
3.
Fix a point (h, n) on the obtained loci as a new left state \((h_p, n_p)\) corresponding to an intermediate state \((h_I, n_I)\), and return to 1.
Following our purpose, we restrict operation 3 to the case that the state \(\{(h_p, n_p), (h, n), s\}\) satisfies the 1-entropy condition (17) and the first our requirement between \((h_L, n_L)\) and (h, n), namely \(h_L < h\) and \(\phi _L \equiv n_L / h_L < n/h \equiv \phi\).
Remark 1
When we compute Hugoniot loci for the system of conservation laws, typical unknown variables corresponding to \({\mathbf{x}}\) in (19) are the state variables \((h,n) \equiv U\) in (15), and the shock speed s is regarded as a component of parameters. However, s is determined by the left state \((h_p, n_p)\) and the right state (h, n) and is relatively difficult to predict a priori. s can be eliminated through the Rankine-Hugoniot condition like (16), which induces extra calculations to construct the corresponding zero-finding problem and reduce unnecessary complexity of the system. In contrast, the dependence of states (h, n) in our interest around \((h_L, n_L)\) is very clear. For example, the initial guess of h should be sufficiently close to \(h_L\). Therefore it is easy to control solutions (n, s) depending on the parameter h, which yields the present methodology.
Remark 2
In typical (and mathematical) treatments of the Riemann problem, in addition to the left state, the right state \((h_R, n_R)\) is also fixed as the initial state (cf. [2]). In contrast, the right state is regarded as an unknowns in (19) because our interest here is the possible distribution of states generating shock structures of our interests, whereas the Riemann problem with given end states as the initial state focuses on all possibilities of solution structures, including rarefactions.
Remark 3
In these computations, (19) is solved by Newton’s method with initial points close to the left states mentioned above. Continuations of solution families were found to end successfully as far as we computed. Entropy conditions were verified by simply checking inequalities (17) and (18) for given left states and computing the right states. If one of these inequalities is satisfied, the solution is labeled as a 1- or 2-shock according to inequalities. Note that the strict hyperbolicity indicates that only a single inequality can be satisfied at most.
Even if neither entropy conditions are satisfied, computation of zeros of (19) continues, because overcompressive or undercompressive shocks may still be present (cf. [10]), although these shocks are beyond the scope of the present work.
In these computations, the strict hyperbolicity of the system (5) and genuine nonlinearity for characteristic fields \(\{\lambda _1(U), \lambda _2(U)\}\) was also calculated independently. Note again that the former requires the separation of the solution structure among different type of elementary waves, including shocks of Lax’s type, and the latter guarantees the existence of shock chains rigorously, at least for right states \((h_R, n_R)\) sufficiently close to the left state \((h_L, n_L)\).

Solution structure with bump generated by Lax’s shock waves. Solid lines describe the h-component of solutions for the Riemann problem (5), while the dotted (thick) lines describe the \(\phi\)-component. The higher values of the intermediate state \((h_I, \phi _I)\) compared with both states given as the Riemann data \((h_L, \phi _L), (h_R, \phi _R)\) show the generation of bump structures. Two shocks with the speeds \(s_1\) and \(s_2\), respectively, do not interact during time evolution provided that \(s_1 < s_2\)
Here, we focus on the shock structure of the system with particles under negative buoyancy. The corresponding situation determines the parameter \(\rho _p\). Unless otherwise noted, we fix \(\rho _p = 2500\) for arguments in this section, while the remaining parameter values \((\rho _f, \phi _m) = (970, 0.67)\) are fixed in the entire set of computations.Footnote 3 The parameter \(\phi _m\) represents the maximal concentration of particles in flow, which is required for all solutions of (5). All of the computed solutions shown below satisfy \(\phi < \phi _m\).
We should also mention the treatment of the ratio \((a/h_0)^2\) given below (5), which is a primary focus of this work. In previous works such as [1, 14], the ratio \((a/h_0)^2\) was not clearly described.Footnote 4 In contrast, \((a/h_0)^2\) was set around 0.01 in subsequent works, e.g., [8]. In this study, we selected the ratio \((a/h_0)^2\) arbitrarily, and hence the solution structure for several sample values of \((a/h_0)^2\) was available to evaluate the qualitative similarity and difference, although the validity of the model itself for relatively large \((a/h_0)^2\) is beyond the scope of this work.
In association with the ratio, we review the actual distribution of the function W(h) in (6). The sample values \(W(1) \equiv W(h)|_{h=1}\) itself and its derivative for fixed values of the particle radius parameter a are shown in Table 1. Indeed, for sufficiently small a such as 0.01, the asymptotic behavior (7) is valid, whereas the differential \(W'(1) \equiv (dW/dh)(1)\) provides a nontrivial contribution to various functions involving the system even for relatively small a.
Remark 4
As shown in figures mentioned below, strict hyperbolicity and genuine nonlinearity are satisfied in the domain of \((h, \phi )\) where the shock structure is considered, as far as we have computed. Therefore, the failure of these properties during the following arguments is irrelevant.
3.1 Effect of particle radius variation on shock structure
Here, we consider the effect of a on the distribution of shock structure. To this end, we fix the left state as representatives
and solve (19). Examples of Hugoniot loci representing right states centered at the left state \((h_L, \phi _L)\) followed by shocks are drawn in Fig. 3. We typically find two branches of Hugoniot loci through \((h_L, \phi _L)\). One branch comprises right states followed by 1-shocks in the direction where h is increasing and pieces of states in which Lax’s entropy conditions are not satisfied, while another comprises segments of right states followed by 2-shocks in the direction where h is decreasing and segments of states which Lax’s entropy conditions are not satisfied. When right states admitting 1-shocks are distributed in the region \(\{h> h_L, \phi > \phi _L\}\), Hugoniot loci regarding a point on the locus in \(\{h> h_L, \phi > \phi _L\}\) as the new left state \((h_I, \phi _I)\) are additionally computed (Fig. 3b). From our purpose, only the loci admitting 2-shocks are computed there. We see that the loci through various \((h_I, \phi _I)\) have a similar structure to that through \((h_L, \phi _L)\). Our computations also showed (in Fig. 3c) collections of right states \((h,\phi )\) connected from \((h_I,\phi _I)\) followed by 2-shocks whose shock speeds \(s_2\) were much higher than the speeds \(s_1\) of the 1-shocks connecting \((h_L,\phi _L)\) and \((h_I,\phi _I)\). Consequently, the triple
is a candidate of states generating the bump structure generated by Lax’s shocks, where \((h_L, \phi _L)\) is fixed, \((h_I, \phi _I)\) is on the locus through \((h_L, \phi _L)\) followed by a 1-shock satisfying \(h_I > h_L\) and \(\phi _I > \phi _L\), and \((h_R, \phi _R)\) is on the locus through \((h_I, \phi _I)\) followed by a 2-shock (cf. Fig. 2).

Solution families of (19) with \((h_L, \phi _L) = (1.0, 0.3)\), \(a=0.01\). In all figures, the horizontal axis represents h and the vertical axis represents ϕ in (a), (b), while the latter represents s in (c). The red curve denotes the collection of right states connected from the left states followed by 1-shocks. The blue curve denotes the collection of right states connected from the left states followed by 2-shocks. The dotted black curve denotes the collection of right states where neither entropy conditions (17) nor (18) are satisfied. Finally, the purple region in (a) and (b) denotes the collection of points where the genuine nonlinearity does not hold. The black square denotes the limit right state (h, ϕ) as (h, ϕ) → (hL, ϕL) along the 1-shock curve, while the black ball denotes the limit right state (h, ϕ) as (h, ϕ) → (hL, ϕL) along the 2-shock curve. The white ball denotes the limit right state (h, ϕ) as (h, ϕ) → (hI , ϕI ) along the 2-shock curve, where (hI , ϕI ) is a point on the locus through (hL, ϕL) followed by a 1-shock. Here the boundary point of 1-shock branch is drawn as the white ball in (b). a shows the Hugoniot loci through (hL, ϕL). b shows the collection of Hugoniot loci through points on the 1-shock curve (red). c shows the corresponding plot of shock speeds determined by right states drawn in (b)
Changing a during computation of Hugoniot loci with the required properties, we observe (at least) three interesting features, which may be observed in Fig. 4.
-
The \(\phi\)-component of the right states followed by 2-shocks remains almost constant, that is, the corresponding right states create plateau regions where the ratio \(a/h_R\) is approximately less than 1. More precisely, \(\phi\) behaves as a monotonously increasing function of h on the plateau region.
-
For different choices of a, the length of curves of right states followed by 1-shocks varies nontrivially. At a minimum, the length does not change monotonously.
-
The speeds of 1-shocks \(s_1\) and 2-shocks \(s_2\) always satisfy \(s_1 < s_2\) for all mentioned states observed in Fig. 4. In particular, our requirement on the speeds of shocks stated in (B2) is always satisfied for bumps generated by Lax’s shocks, as far as we computed in this study.
The first observation reflects the validity of the model from a physical perspective. The ratio a/h measures the physical characteristic of films in finite-volume flows. To ensure that particle-laden flows behave as colloids, in particular continua, \((a/h_0)^2 \ll 1\) is required (cf. [8]Footnote 5). Interestingly, the assumption \((a/h_0)^2 \ll 1\) approximately corresponds to the existence of plateau regions on 2-shock curves as far as \(a/h < 1\) holds for the right state. That is, we observed that loci of states in \((h,\phi )\)-plane admitting 2-shocks are strongly curved if \(a/h \ge 1\) holds or a is relatively large, which can correspond to a violation of the continuum hypothesis. Taking the treatment of particle-laden flows as continua into account, which is essential to derive the present model, the plateau regions demonstrate the physical reliability of arguments. Moreover, the property of \(\phi\) on the locus admitting 2-shocks being an increasing function of h is important in the following arguments.
The second observation strongly relates to generations of the bump structure by Lax’s shocks in various choices of particles in mixture fluids. Indeed, Fig. 4 shows a collection of composite Hugoniot loci, from which we can choose triples \(\{(h_L, \phi _L), (h_I, \phi _I), (h_R, \phi _R)\}\) satisfying requirements (B1) and (B2). It should be noted that the last comment in the first observation is considered in concluding (B2). It follows from the definition of state variables that the length of curves of right states followed by 1-shocks determines the upper bounds of the bump height. Moreover, the plateau regions in 2-shock curves mentioned above imply that particles are homogeneously distributed in bumps of mixture fluids for any height of tips, provided that \(a < h_R\) holds.
We remark on the relationship of speeds \(s_1, s_2\) of shocks observed in Fig. 4 as the third observation.

Solution families of (19) with \((h_L, \phi _L) = (1.0, 0.3)\) and various a. The basic description of the figures is the same as that of previous figures. In all figures, the horizontal axis is h with the \(\log\)-scale plotting, whereas the vertical represents \(\phi\). a \(a=0.001\). b \(a=0.01\). c \(a=0.05\). d \(a=0.1\). e \(a=0.2\). f \(a=0.5\). The length of 1-shock curves depends on a. Moreover, we see that, for small a such as \(a \le 0.1\), the 2-shock curves are almost flat for \(h > a\)
Here, we compare our results with preceding works such as [2, 14]. In all studies, results with \((h_L, \phi _L) = (1.0, 0.3)\) and \(\rho _p = 2500\) were obtained. According to [14], the bump structure is obtained in this setting by means of shocksFootnote 6 as the triple of constant states \((U_L, U_I, U_R)\) with
such that \((U_L, U_I)\) is followed by the 1-shock with the speed \(s_1\approx 0.4556\) and that \((U_I, U_R)\) is followed by the 2-shock with the speed \(s_2\approx 0.4956\). In contrast, according to our computations with \((a/h_0)^2 = 0.0001\), the bump structure (in the sense of Lax) can be constructed when \(h_I \le 1.1210\) and \(\phi _I \le 0.3903\) for 1-shocks whose corresponding shock speed is \(s_1 \approx 0.44927\). In addition, according to our computations, the shock speed \(s_2\) following the states \((h_I, \phi _I) = (1.1210, 0.3903)\) and \((h_R, \phi _R) \approx (0.1, 0.3)\) is \(s_2 \approx 0.4930\), which approximately agrees with the results in preceding studies up to the small corrections of values. Of note, the present model (9) was originally obtained in [2], and differs slightly from [14]. In [2], the entropy conditions used to characterize Lax’s shock are incorrect, whereas our entropy conditions (17)-(18) follow from the general theory of shocks (cf. [11]). This difference can induce small but nontrivial variations in the range of constant states admitting Lax’s shocks.
Finally we mention results in [2] where shock structure with given right states \((h_R, \phi _R)\) were studied. In particular, significantly small \(\phi _R\) such as 0.002 and 0.0005 were also considered. Incorporating our present results with the preceding results, the shock structure in the sense of Lax may be considered physically meaningful only if \(a < h\) holds, which indicates that an excessively small \(\phi _R\) can be meaningless in describing Lax’s shocks when the effect of particle-wall interaction W(h) is explicitly considered and the radius a is inappropriately selected, while it is not explicitly mentioned in [2]. It should be also mentioned that the choice of small \(\phi _R\) does not deny the possibility of solutions of (5) with the right state \((h_R, \phi _R)\) by means of other type of (elementary) waves, such as rarefactions or singular shocks which cannot be characterized by means of Hugoniot loci.
3.2 Effect of particle concentration on shock structure
Next, we study the effect of the initial concentration \(\phi _L\) of particles on the shock structure. Here, we fix a as 0.01 and vary \(\phi _L\), leaving all remaining parameters unchanged. Figure 5 shows the Hugoniot loci with left states \((h_L, \phi _L) = (1.0, 0.2), (1.0, 0.3)\) and (1.0, 0.4), respectively. In any cases, two Hugoniot loci through \((h_L, \phi _L)\) are computed, either side of which consists of right states connected to \((h_L, \phi _L)\) followed by 1- or 2-shocks. Interestingly, a collection of right states \((h,\phi )\) connected from \((h_L, \phi _L)\) followed by a 1-shock satisfying \(h_L < h\) and \(\phi _L < \phi\) may be observed when \((h_L, \phi _L) = (1.0, 0.2)\) and (1.0, 0.3), whereas it is not evident when \((h_L, \phi _L) = (1.0, 0.4)\).

Hugoniot loci through \((h_L, \phi _L)\) with various \(\phi _L\), \(a=0.01\). The figures are marked as described above. a \(\phi _L = 0.2\). b \(\phi _L = 0.3\), which is the same as Fig. 3a. c \(\phi _L = 0.4\). In (c), the 1-shock branch is distributed in \(\{h < h_L\}\)
The robustness of Lax’s shock structure ensures that the above observation persists under small perturbations of \((h_L, \phi _L)\) with an appropriate choice of \((h_I, \phi _I)\), which can be confirmed at least in the numerical sense.Footnote 7 Then, our next interest is the limit of \((h_L, \phi _L)\) where the bump structure generated by Lax’s shocks persists. In this study, we fix \(h_L = 1\) throughout and vary \(\phi _L\). Once again, a is fixed as 0.01. Numerical investigations based on the bisection method yield the following observation, which indicates the limitation of generating bump structure.
- (Limit):
-
When we fix \(h_L = 1.0\) and \(a=0.01\), there exists an intermediate state \((h_I, \phi _I)\) with \(h_I \le 1.4\) followed by a 1-shock if and only if \(\phi _L \le \phi _{L,*}\), where \(\phi _{L,*} \approx 0.3314575\).
3.3 2-Parameter dependence on shock structure
The observation (Limit) implies that the initial concentration \(\phi _L\) of particles therefore affect the generation of bumps, in particular the limitation of bump structure generation. In contrast, observations in Fig. 4 indicate that the generation of bump structure by means of Lax’s shocks depends not only on \(\phi _L\) but also a. It is then worth investigating the distribution of parameters \((\phi _L, a)\) where the bump structure can be generated. According to Fig. 3, collections of right states \((h_R, \phi _R)\) from \((h_I, \phi _I)\) followed by 2-shocks satisfying (B2) are typically generated, and hence investigation of the existence of intermediate states satisfying (B1) provides a necessary, and possibly sufficient environment to generate the bump structure. To this end, we fix \(h_L = 1.0\) as before and vary both \(\phi _L\) and a. Hugoniot loci including states satisfying (B1) with various \(\phi _L\) and a are mainly considered.

The region of (a, h) admitting 1-shocks satisfying (B1) for fixed \(\phi _L\). In all figures, the projection of the Hugoniot locus on (a, h)-plane through \((h_L, \phi _L)\) are drawn, possibly including right states followed by 1-shocks. As in previous figures, the red region denotes the collection of right states followed by 1-shocks, whereas the black region denotes the collection of right states violating entropy conditions. The horizontal axis represents \(a\in [0.01, 0.6]\) and the vertical axis represents \(h\in [1,4]\). a \(\phi _L = 0.2\). b \(\phi _L = 0.3\). c \(\phi _L = 0.4\)
First, distribution of (a, h) with various \(\phi _L\) such that 1-shocks are admitted is summarized in Fig. 6, where the range of h is restricted to \(h>1\). From the results for fixed \(\phi _L\), we first observe that the upper bound \(h_{\max }\) of \(h > h_L\) admitting 1-shocks converged to a certain value as \(a \rightarrow 0\) when \(\phi _L\) was relatively small, say \(\phi _L \approx 0.3\). For example, when \(\phi _L = 0.3\), the upper bound was \(h_{\max } \approx 1.121185\), while it was \(h_{\max }\approx 1.6519053\) when \(\phi _L = 0.2\) and 1-shocks were not generated for small a when \(\phi _L = 0.4\). This observation indicates that the bump generation mechanism is robust among different particles with sufficiently small radii if \(\phi _L\) is relatively small. For \(\phi _L=0.2\) (Fig. 6a), 1-shocks are admitted for a large range of a, while the range of h admitting 1-shocks varies significantly as a increases. When a becomes larger, the range of h admitting 1-shocks also increases, which is significant in the middle particle size range, say \(a\in [0.3, 0.5]\). When a becomes much larger, say \(a \ge 0.54\), the region is separated into two subregions. In particular, only small and considerably large bumps can be generated, while the region of large h is admitted in a thin range of a. The qualitatively similar feature can be also seen in environments with a slightly larger \(\phi _L\), say 0.3 (Fig. 6b). In contrast, when \(\phi _L = 0.3\), we also see that only low-height bumps can be generated whose height decreases monotonously in a with \(a\le 0.6\). Furthermore, for much larger \(\phi _L\), say 0.4 (Fig. 6c), bump structure is generated only for the middle particle size range, say \(a\in [0.2, 0.4]\). This result is compatible with the observation (Limit).

The region of \((\phi _L, h)\) admitting 1-shocks satisfying (B1) for fixed a. The figures are as shown above in Fig. 6. This figure shows the projection of the Hugoniot loci on the \((\phi ,h)\)-plane. The horizontal axis is replaced by \(a\in [0.2, 0.4]\). a \(a = 0.01\). b \(a = 0.1\). c \(a = 0.3\). d \(a = 0.5\)
Comparing all figures in Fig. 6, the region admitting 1-shocks appears increasingly small as \(\phi _L\) increases monotonously, while it is indeed nontrivial because contributions of a and \(\phi _L\) in the problem (19) is nonlinear. We then studied the distribution of \((\phi _L, h)\) with various a admitting 1-shocks, and the results are summarized in Fig. 7, where the range of h is restricted to \(h>1\) like Fig. 6. As may be observed from Fig. 7, the region where 1-shocks are admitted monotonously shrinks as \(\phi _L\) becomes large, for small a such as 0.01 and 0.1. When \(a = 0.01\), the upper bound of \(\phi _L\) where 1-shocks are admitted is \(\phi _{L,*}\) as computed before (see the observation (Limit)). The monotonously decreasing behavior may also be observed in the middle-sized particles, on the order of \(a=0.3\), but the region of h admitting 1-shocks itself is significantly large for all \(\phi _L\) under consideration. Compared with Fig. 6, this feature reflects the significant increase of the region for a around 0.3. When a is considerably large, say \(a=0.5\), the region of the presence of 1-shocks depends on \(\phi _L\) in a nontrivial manner. As in the previous observation, the region is separated at \(\phi _L \approx 0.23397\) and the boundary of the region in \((\phi _L, h)\)-plane becomes nonsmooth at \(\phi _L \approx 0.2642\). As \(\phi _L\) becomes much larger, say \(\phi _L \ge 0.32\) with \(a=0.5\), no 1-shocks of interest can be generated, as may be observed from Fig. 6.
Remark 5
We present Figs. 6 and 7 as a collection of sample points (a, h) in Fig. 6 and \((\phi _L, h)\) in Fig. 7, respectively. More precisely, we numerically investigated the existence of 1-shocks through the 1-entropy condition (17) at \(a = i\varDelta a\) and \(\phi _L = 0.2 + i\varDelta \phi _L\), respectively, for \(i\ge 0\). In the present investigation, we fixed \(\varDelta a = 1/500\) and \(\varDelta \phi _L = 1/1500\). At one fixed a or \(\phi _L\), h is continued starting at \(h=1\) through the pseudo-arclength continuation as far as \(h\le 4\); otherwise i is replaced by \(i+1\) and the continuation is operated from \(h=1\) again. The index i has run over \({\mathbb {Z}_{\ge 0}}\) while \(a \le 0.6\) and \(\phi _L\le 0.4\), respectively, is satisfied.
4 Concluding remark
In this study, we have explored the bump structure of particle-laden flows through a simplified model of conservation laws. We have mainly investigated the dependence of the radius and initial concentration of particles in films on a ridge, considering particle-particle and particle-wall interactions, although the latter is intrinsically considered only in an asymptotic sense in prior works. The bump structure is considered by means of composite waves consisting of Lax’s shocks. We have observed the nonlinear dependence of radius and concentration of particles on bump structure of shocks. For relatively small radii of particles enabling the treatment of particle-laden flows as continua is valid, the bump structure is generically admitted with a non-trivial but limited range of heights which depend on the initial concentration of particles. As the radius increased, the bump formation mechanism becomes complex and significantly high bumps could be also generated, whereas bumps with moderate height were prevented. For fixed particle radii, the range of bump heights monotonically decreased as the initial concentration of particles increased when the radius was relatively small. When the radius became relatively large, the mechanism of bump generation behaved in a nonlinear manner as a function of initial concentration. In contrast to prior works such as [2, 14], we extracted the genuine contribution of particle characteristics to the morphology of particle-laden flows, possibly with their physical reliability in terms of mathematical arguments based on the theory of conservation and objects such as Hugoniot loci.
In contrast, in Murisic et al. [8], a modified model including the effect of shear-induced migration is proposed, where the importance of the particle size considerations we have also mentioned was emphasized in their experiments, especially in the transient (well-mixed) regime. Several numerical simulations in e.g. [13] have shown the existence of the bump (double-shock) and singular shock structure with relatively high initial particle concentrations \(\phi _L = 0.5\). The reduced model used to characterize their targeting objects by means of shocks differs from the model considered in this study, and comparison of solution structures with those in the present model remain as directions for future research on extracting the similarity and difference of results towards the study of the intrinsic contribution of, e.g., shear-induced migration.
Notes
These values are quoted from Table I in [12].
This value can relate to the sensitive dependence of experimental data on precursor film, according to [14].
For reference, we note that \((a/h_0)^2 = O(10^{-2})\) in the end of early-stage transient evolution of particle-laden flows; i.e., a well-mixed state is a physically different situation from the present argument.
In the present system, the regularity of the Jacobian matrix of G in (20) with respect to (s, n), the continuity of eigenvalues \(\lambda _1, \lambda _2\), Lax’s entropy condition, and the genuine nonlinearity of characteristic fields as well as the Implicit Function Theorem for \(G({\mathbf{x}}, {\mathbf{p}})=0\) ensure robustness.
References
Cook, B.: Theory for particle settling and shear-induced migration in thin-film liquid flow. Phys. Rev. E 78, 045303 (2008)
Cook, B., Bertozzi, A., Hosoi, A.: Shock solutions for particle-laden thin films. SIAM J. Appl. Math. 68, 760–783 (2008)
Doedel, E., Keller, H.B., Kernevez, J.P.: Numerical analysis and control of bifurcation problems (I): bifurcation in finite dimensions. Int. J. Bifurcat. chaos 1(03), 493–520 (1991)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory, vol. 112. Springer, New Yok (2013)
Lax, P.D.: Hyperbolic system of conservation laws II. Commun. Pure Appl. Math. 10, 537–566 (1957)
Mavromoustaki, A., Bertozzi, A.L.: Hyperbolic systems of conservation laws in gravity-driven, particle-laden thin-film flows. J. Eng. Math. 88, 29–48 (2014)
Murisic, N., Ho, J., Hu, V., Latterman, P., Koch, T., Lin, K., Mata, M., Bertozzi, A.: Particle-laden viscous thin-film flows on an incline: experiments compared with a theory based on shear-induced migration and particle settling. Physica D 240, 1661–1673 (2011)
Murisic, N., Pausader, B., Peschka, D., Bertozzi, A.L.: Dynamics of particle settling and resuspension in viscous liquids. J. Fluid Mech. 717, 203–231 (2013)
Richardson, J.F., Zaki, W.N.: The sedimentation of a suspension of uniform spheres under conditions of viscous flow. Chem. Eng. Sci. 3, 65–73 (1954)
Schecter, S., Marchesin, D., Plohr, B.J.: Structurally stable Riemann solutions. J. Differ. Equ. 126(2), 303–354 (1996)
Smoller, J.: Shock waves and reaction–diffusion equations, 258 of Grundlehren der Mathematischen Wissenschaften (Fundamental Principles of Mathematical Sciences), 2nd edn. Springer-Verlag, New York (1994)
Wang, L., Bertozzi, A.L.: Shock solutions for high concentration particle laden thin films. SIAM J. Appl. Math. 74(2), 322–344 (2014)
Wang, L., Mavromoustaki, A., Bertozzi, A.L., Urdaneta, G., Huang, K.: Rarefaction-singular shock dynamics for conserved volume gravity driven particle-laden thin film. Phys. Fluids 27(3), 033301 (2015)
Zhou, J., Dupuy, B., Bertozzi, A.L., Hosoi, A.E.: Theory for shock dynamics in particle-laden thin films. Phys. Rev. Lett. 94, 117803 (2005)
Acknowledgements
This work was supported by JSPS Grant-in-Aid for Scientific Research (C) (No. JP18K03437). KM was partially supported by Program for Promoting the reform of national universities (Kyushu University), Ministry of Education, Culture, Sports, Science and Technology (MEXT), Japan, World Premier International Research Center Initiative (WPI), MEXT, Japan and JSPS Grant-in-Aid for Young Scientists (B) (No. JP17K14235). The authors would also like to thank Dr. Akane Kawaharada, who helped us with experimental observation of particle-laden flows. Finally, we would like to thank Editage (www.editage.com) for English language editing in our paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Matsue, K., Tomoeda, K. A mathematical treatment of the bump structure of particle-laden flows with particle features. Japan J. Indust. Appl. Math. 39, 1003–1023 (2022). https://doi.org/10.1007/s13160-022-00521-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13160-022-00521-2