
Abstract
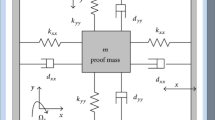
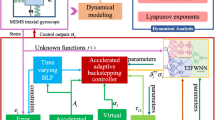
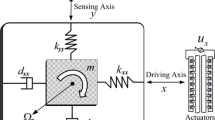
In this paper, a backstepping controller with an adaptive neural states observer is proposed for MEMS (Micro-Electro-Merchanical-System) gyroscopes in the presence of model uncertainties and external disturbance. Gyroscope states are usually assumed to be available in controller design procedure. However, gyroscope states may be unavailable in some circumstances. In this paper, an adaptive neural states observer is employed to estimate gyroscope states without physical sensors and thus can help reducing complexity of the gyroscope system. A backstepping controller is utilized to control the vibrating amplitude and frequency of the mass proof and the control law is carried out with states estimation rather than actual gyroscope states. Adaptive laws are investigated in the Lyapunov stability framework to guarantee the stability of the observer. Numerical simulation results demonstrate the effectiveness of the proposed control scheme.













Similar content being viewed by others
References
Juan W, Fei J (2013) Adaptive fuzzy approach for non-linearity compensation in MEMS gyroscope. Trans Inst Meas Control 35(8):1008–1015
Fazlyab M, Pedram MZ (2013) Parameter estimation and interval type-2 fuzzy sliding mode control of a z-axis MEMS gyroscope. ISA Trans 52(6):900–911
Wang S, Fei J (2014) Robust adaptive sliding mode control of MEMS gyroscope using T–S fuzzy model. Nonlinear Dyn 77(1–2):361–371
Ashfaq RAR, Wang XZ, Huang JZX, Abbas H, He YL (2016) Fuzziness based semi-supervised learning approach for intrusion detection system. Inf Sci. doi:10.1016/j.ins.2016.04.019 (in press)
Gao S, Ning B, Dong H (2015) Adaptive neural control with intercepted adaptation for time-delay saturated nonlinear systems. Neural Comput Appl 26(8):1–9
Wang XZ, Ashfaq RAR, Fu AM (2015) Fuzziness based sample categorization for classifier performance improvement. J Intell Fuzzy Syst 29(3):1185–1196
Wang XZ (2015) Learning from big data with uncertainty—editorial. J Intell Fuzzy Syst 28(5):2329–2330
Gao S, Dong H, Ning B, Chen L (2015) Neural adaptive control for uncertain nonlinear system with input saturation: state transformation based output feedback. Neurocomputing 159(1):117–125
He YL, Wang XZ, Huang JZX (2016) Fuzzy nonlinear regression analysis using a random weight network. Inf Sci. doi:10.1016/j.ins.2016.01.037 (in press)
Gao S, Dong H, Ning B, Sun X (2015) Neural adaptive control for uncertain MIMO systems with constrained input via intercepted adaptation and single learning parameter approach. Nonlinear Dyn 82(3):1–18
Cui LZ, Yu FR, Yan Q (2016) When big data meets software-defined networking: SDN for big data and big data for SDN. IEEE Netw 30(1):58–65
Gao S, Dong H, Sun X, Ning B (2015) Neural adaptive chaotic control with constrained input using state and output feedback. Chin Phys B 24(1):170–176
Laurent, Matthieu F, Antoine F (2013) Adaptive controller and observer for a magnetic microrobot. IEEE Trans Robot 29(4):1060–1067
Wonhee K, Donghoon S, Daehee W (2013) Disturbance-observer-based position tracking controller in the presence of biased sinusoidal disturbance for electrohydraulic actuators. IEEE Trans Control Syst Technol 21(6):2290–2298
Jiang, Xu D, Shi P, Lim CC (2014) Adaptive neural observer-based backstepping fault tolerant control for near space vehicle under control effector damage. IET Control Theory Appl 8(9):658–666
Chen M, Ge S (2013) Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans Cybern 43(4):1213–1225
Li Y, Tong S, Li T (2013) Adaptive fuzzy backstepping control of static var compensator based on state observer. Nonlinear Dyn 73(1–2):133–142
Choi J, Farrell J (2001) Adaptive observer backstepping control using neural networks. IEEE Trans Neural Netw 12(5):1103–1112
Yao Y, Jiao Z, Ma D (2014) Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans Industr Electron 61(11):6285–6293
Tong S, Li Y, Shi P (2012) Observer-based adaptive fuzzy backstepping output feedback control of uncertain MIMO pure-feedback nonlinear systems. IEEE Trans Fuzzy Syst 20(4):771–785
Boulkroune A, Bounar N, M’Saad, Farza M (2014) Indirect adaptive fuzzy control scheme based on observer for nonlinear systems: a novel SPR-filter approach. Neurocomputing 135(SI):378–387
Zhou Q, Shi P, Xu S, Li H (2013) Observer-based adaptive neural network control for nonlinear stochastic systems with time delay. IEEE Trans Neural Net Learn Syst 24(1):71–80
Ting, Chang Y (2013) Observer-based backstepping control of linear stepping motor. Control Eng Pract 21(7):730–739
Xu Y, Tong S, Li YM (2013) Observer-based fuzzy adaptive control of nonlinear systems with actuator faults and unmodeled dynamics. Neural Comput Appl 23(S1):391–405
Yoo S, Park J, Choi Y (2008) Output feedback dynamic surface control of flexible joint robots. Int J Control Autom Syst 6(2):223–233
Na J, Ren X, Zheng D (2013) Adaptive control for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans Neural Netw Learn Syst 24(3):370–382
Acknowledgments
The authors thank the anonymous reviewers for your constructive comments that improved the quality of the paper. This work is partially supported by National Science Foundation of China under Grant No. 61374100; Natural Science Foundation of Jiangsu Province under Grant No. BK20131136.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lu, C., Fei, J. Backstepping control of MEMS gyroscope using adaptive neural observer. Int. J. Mach. Learn. & Cyber. 8, 1863–1873 (2017). https://doi.org/10.1007/s13042-016-0564-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13042-016-0564-5