
Abstract
The restoration of a power system after an extended blackout starts around units with enhanced technical capabilities, referred to as black start units (BSUs). We examine the planning problem of optimally allocating these units on the grid subject to a budget constraint. We present a mixed integer programming model based on current literature in power systems. Binary variables are associated with the allocation of BSUs and with the energization state of buses, branches, and generators of the power system over a time horizon. We extract a substructure of the feasible region which imposes the requirement that each island that appears during the restoration process must contain at least one operational generator. We discuss reformulations for this requirement and introduce a family of exponentially many, polynomially separable, valid inequalities to strengthen the formulation. Under simplifying assumptions, we show that some of the constraints we introduced are facet defining. We perform experiments to examine the difference in strength between formulations and the computational times to solve the problem to near optimality for multiple synthetic power system instances with up to 2000 buses. We illustrate a use case of the model. We conclude by suggesting extensions of the current work for future research.



Similar content being viewed by others

References
Álvarez-Miranda, E., Ljubić, I., Mutzel, P.: The maximum weight connected subgraph problem. In: Facets of combinatorial optimization, pp. 245–270. Springer (2013)
Álvarez-Miranda, E., Ljubić, I., Mutzel, P.: The rooted maximum node-weight connected subgraph problem. In: International Conference on AI and OR Techniques in Constriant Programming for Combinatorial Optimization Problems, pp. 300–315. Springer (2013)
Arab, A., Khodaei, A., Khator, S.K., Han, Z.: Electric power grid restoration considering disaster economics. IEEE Access 4, 639–649 (2016)
Aravena, I., Rajan, D., Patsakis, G.: Mixed-integer linear approximations of ac power flow equations for systems under abnormal operating conditions. In: 2018 IEEE Power & Energy Society General Meeting (PESGM), pp. 1–5. IEEE (2018)
Aravena, I., Rajan, D., Patsakis, G., Oren, S.: A scalable mixed-integer decomposition approach for optimal power system restoration. Tech. rep, Optimization Online (2019)
Atamturk, A., Narayanan, V.: Submodular function minimization and polarity. arXiv preprint arXiv:1912.13238 (2019)
Bienstock, D., Mattia, S.: Using mixed-integer programming to solve power grid blackout problems. Discrete Optim. 4(1), 115–141 (2007)
Biha, M.D., Kerivin, H.L., Ng, P.H.: Polyhedral study of the connected subgraph problem. Discrete Math. 338(1), 80–92 (2015)
Birchfield, A.B., Xu, T., Gegner, K.M., Shetye, K.S., Overbye, T.J.: Grid structural characteristics as validation criteria for synthetic networks. IEEE Trans Power Syst 32(4), 3258–3265 (2016)
Byeon, G., Van Hentenryck, P., Bent, R., Nagarajan, H.: Communication-constrained expansion planning for resilient distribution systems. INFORMS J. Comput. (2020). https://doi.org/10.1287/ijoc.2019.0899
California ISO: Black start and system restoration Phase 2. https://www.caiso.com/informed/Pages/StakeholderProcesses (2017). [Online; Accessed Aug 2017]
Carvajal, R., Constantino, M., Goycoolea, M., Vielma, J.P., Weintraub, A.: Imposing connectivity constraints in forest planning models. Oper. Res. 61(4), 824–836 (2013)
Castillo, A.: Microgrid provision of blackstart in disaster recovery for power system restoration. In: Smart Grid Communications, 2013 IEEE International Conference on, pp. 534–539. IEEE (2013)
Chou, Y.T., Liu, C.W., Wang, Y.J., Wu, C.C., Lin, C.C.: Development of a black start decision supporting system for isolated power systems. IEEE Trans. Power Syst. 28(3), 2202–2210 (2013)
Coffrin, C., Van Hentenryck, P.: Transmission system restoration with co-optimization of repairs, load pickups, and generation dispatch. Int. J. Electr. Power Energy Syst. 72, 144–154 (2015)
Csardi, G., Nepusz, T., et al.: The igraph software package for complex network research. Int. J. Complex Syst. 1695(5), 1–9 (2006)
Demetriou, P., Asprou, M., Kyriakides, E.: A real-time controlled islanding and restoration scheme based on estimated states. IEEE Trans. Power Syst. (2018). https://doi.org/10.1109/TPWRS.2018.2866900
Dilkina, B., Gomes, C.P.: Solving connected subgraph problems in wildlife conservation. In: International Conference on Integration of Artificial Intelligence (AI) and Operations Research (OR) Techniques in Constraint Programming, pp. 102–116. Springer (2010)
Ding, T., Sun, K., Huang, C., Bie, Z., Li, F.: Mixed-integer linear programming-based splitting strategies for power system islanding operation considering network connectivity. IEEE Syst. J. (2015). https://doi.org/10.1109/JSYST.2015.2493880
Ding, T., Sun, K., Yang, Q., Khan, A.W., Bie, Z.: Mixed integer second order cone relaxation with dynamic simulation for proper power system islanding operations. IEEE J. Emerg. Sel. Top. Circuits Syst. 7(2), 295–306 (2017)
Dittrich, M.T., Klau, G.W., Rosenwald, A., Dandekar, T., Müller, T.: Identifying functional modules in protein-protein interaction networks: an integrated exact approach. Bioinformatics 24(13), i223–i231 (2008)
Fan, N., Izraelevitz, D., Pan, F., Pardalos, P.M., Wang, J.: A mixed integer programming approach for optimal power grid intentional islanding. Energy Syst. 3(1), 77–93 (2012)
Fan, N., Watson, J.P.: Solving the connected dominating set problem and power dominating set problem by integer programming. In: International conference on combinatorial optimization and applications, pp. 371–383. Springer (2012)
Fan, N., Xu, H., Pan, F., Pardalos, P.M.: Economic analysis of the n- k power grid contingency selection and evaluation by graph algorithms and interdiction methods. Energy Syst. 2(3), 313–324 (2011)
Garifi, K., Johnson, E., Arguello, B., Pierre, B.J.: Transmission grid resiliency investment optimization model with socp recovery planning. IEEE Trans. Power Syst. (2021). https://doi.org/10.1109/TPWRS.2021.3091538
Gholami, A., Sun, X.A.: Towards resilient operation of multimicrogrids: an misocp-based frequency-constrained approach. IEEE Trans. Control Netw. Syst. 6(3), 925–936 (2018)
Golari, M., Fan, N., Wang, J.: Two-stage stochastic optimal islanding operations under severe multiple contingencies in power grids. Electr. Power Syst. Res. 114, 68–77 (2014)
Ideker, T., Ozier, O., Schwikowski, B., Siegel, A.F.: Discovering regulatory and signaling circuits in molecular interaction networks. Bioinformatics 18(suppl–1), S233–S240 (2002)
Jiang, Y., Chen, S., Liu, C.C., Sun, W., Luo, X., Liu, S., Bhatt, N., Uppalapati, S., Forcum, D.: Blackstart capability planning for power system restoration. Int. J. Electr. Power Energy Syst. 86, 127–137 (2017)
Kafka, R.: Review of PJM restoration practices and NERC restoration standards. In: Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, 2008 IEEE, pp. 1–5. IEEE (2008)
Lee, H.F., Dooly, D.R.: Decomposition algorithms for the maximum-weight connected graph problem. Nav. Res. Logist. (NRL) 45(8), 817–837 (1998)
Li, X., Qi, Z.: Impact of cascading failure based on line vulnerability index on power grids. Energy Syst. (2021). https://doi.org/10.1007/s12667-021-00435-x
Liu, S., Podmore, R., Hou, Y.: System restoration navigator: A decision support tool for system restoration. In: Power and Energy Society General Meeting, 2012 IEEE, pp. 1–5. IEEE (2012)
Lotfi, H., Ghazi, R., et al.: Multi-objective dynamic distribution feeder reconfiguration along with capacitor allocation using a new hybrid evolutionary algorithm. Energy Syst. 11(3), 779–809 (2020)
Lu, M., Eksioglu, S.D., Mason, S.J., Bent, R., Nagarajan, H.: Distributionally robust optimization for a resilient transmission grid during geomagnetic disturbances. arXiv preprint arXiv:1906.04139 (2019)
Minkel, J.: The 2003 Northeast Blackout–Five Years Later. Scientific American 13 (2008)
Mishra, S., Das, D., Paul, S.: A comprehensive review on power distribution network reconfiguration. Energy Syst. 8(2), 227 (2017)
National Infrastructure Advisory Council: Critical infrastructure resilience: Final report and recommendations. National Infrastructure Advisory Council (US) (2009)
Patsakis, G.: Enhancing power system resilience through computational optimization. University of California, Berkeley (2020)
Patsakis, G., Aravena, I., Oren, S.: Black start allocation for power system restoration data. IEEE Trans. Power Syst. (2020). https://doi.org/10.5281/zenodo.3842167
Patsakis, G., Aravena, I., Rajan, D.: A stochastic program for black start allocation. In: Proceedings of the 52nd Hawaii International Conference on System Sciences (2019)
Patsakis, G., Rajan, D., Aravena, I., Oren, S.: Strong mixed-integer formulations for power system islanding and restoration. IEEE Trans. Power Syst. 34(6), 4880–4888 (2019)
Patsakis, G., Rajan, D., Aravena, I., Rios, J., Oren, S.: Optimal black start allocation for power system restoration. IEEE Trans. Power Syst. 33(6), 6766–6776 (2018)
Phillips, J., Finster, M., Pillon, J., Petit, F., Trail, J.: State energy resilience framework. Tech. rep., Argonne National Lab.(ANL), Argonne, IL (United States) (2016)
PJM: PJM Manual: System Restoration (2017). Rev. 24
PJM: PJM Manual 14D:Generator Operational Requirements (2019). Rev. 51
Qiu, F., Li, P.: An integrated approach for power system restoration planning. Proc. IEEE 105(7), 1234–1252 (2017)
Qiu, F., Wang, J., Chen, C., Tong, J.: Optimal black start resource allocation. IEEE Trans. Power Syst. 31(3), 2493–2494 (2016)
Saraf, N., McIntyre, K., Dumas, J., Santoso, S.: The annual black start service selection analysis of ERCOT grid. IEEE Trans. Power Syst. 24(4), 1867–1874 (2009)
Sun, W., Liu, C.C., Liu, S.: Black start capability assessment in power system restoration. In: Power and Energy Society General Meeting, 2011 IEEE, pp. 1–7. IEEE (2011)
Sun, W., Liu, C.C., Zhang, L.: Optimal generator start-up strategy for bulk power system restoration. IEEE Trans. Power Syst. 26(3), 1357–1366 (2011)
Teymouri, F., Amraee, T., Saberi, H., Capitanescu, F.: Towards controlled islanding for enhancing power grid resilience considering frequency stability constraints. IEEE Transactions on Smart Grid (2017)
Van Hentenryck, P., Coffrin, C.: Transmission system repair and restoration. Math. Program. 151(1), 347–373 (2015)
Wang, Y., Buchanan, A., Butenko, S.: On imposing connectivity constraints in integer programs. Math. Program. 166(1–2), 241–271 (2017)
Wang, Y., Chen, C., Wang, J., Baldick, R.: Research on resilience of power systems under natural disasters-a review. IEEE Trans. Power Syst. 31(2), 1604–1613 (2015)
Yutian, L., Rui, F., Terzija, V.: Power system restoration: a literature review from 2006 to 2016. J. Mod. Power Syst. Clean Energy 4(3), 332–341 (2016)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Georgios Patsakis is a Fellow of the Onassis Foundation. Ignacio Aravena was supported by the U.S. Department of Energy by Lawrence Livermore National Laboratory under Contract DE-AC52-07NA27344. Professor Shmuel Oren was supported by the ARO grant W911NF-17-1-0555.
Appendices
Appendix
The appendix provides the proofs of propositions, corollaries, and remarks in the paper. To avoid confusion, the statements are repeated for the reader’s convenience.
A. Proof of proposition 2
Proposition 10
(Proposition 2.) The following optimization problem (\(\varvec{c \in \mathbb {Q}^d}\)) is NP-hard:
Proof of proposition 2
The Rooted Maximum Weight Connected Subgraph Problem (RMWCS), with weights on edges and nodes, known to be NP-hard (see [28]), can be reduced to (9). The statement of RMWCS is as follows: consider an undirected graph \(\hat{G}\) with node set \(\hat{N}\), edge set \(\hat{E}\), and a given node \(r \in \hat{N}\). Weights are associated with nodes and edges of the graph. We seek to find a maximum weight connected subgraph that contains r.
We partition the set of edges \(\hat{E}\) into two sets, the set of neighboring edges to r, \(\hat{E}(r)\), and \(\hat{E} {\setminus } \hat{E}(r)\). Now consider a power system with generator set \(\hat{E}(r)\), bus set \(\hat{N} \setminus \{r\}\), and branch set \(\hat{E} \setminus \hat{E}(r)\). The generator objective weights are set equal to the weights of edges \(\hat{E}(r)\), the branch weights equal to the weights of the set \(\hat{E} \setminus \hat{E}(r)\), and the bus weights equal to the weights of \(\hat{N} \setminus \{r\}\) accordingly. We establish a 1-1 mapping between rooted connected subgraphs of \(\hat{G}\) and feasible points of Eq. (9), with the same objective value. Due to Eqs. (2a)–(2b), the solution of (9) corresponds to a subgraph of the original graph \(\hat{G}\) (if we select an edge, we select both its endpoints). The all-zero point in (9) corresponds to the case where the subgraph of \(\hat{G}\) chosen is the singleton \(\{r\}\). In any nonzero feasible solution to (9), there exists a path from every energized node to at least one generator in \(\hat{E}(r)\), which means that the subgraph induced in the original graph is connected and contains the root. Conversely, every connected subgraph of the original graph corresponds to a subgraph of \((\hat{N} {\setminus } \{r\},\hat{E} {\setminus } \hat{E}(r))\), which consists of connected components each one of which has to be connected to r through one of its neighbors \(\hat{E}(r)\)—this means that each induced island has at least one energized generator. This completes the reduction.
B. Proofs of statements of sect. 4.3
1.1 B.1. Proof of proposition 3
Proposition 11
(Proposition 3.) Constraints (11) are valid for the feasible region H.
Proof of proposition 3
Let \(\varvec{u}\) be an feasible point for H (binary vector). We show that for all \(S \subseteq N\), constraints (11) are satisfied at \(\varvec{u}\). The proof is by induction on the cardinality of the set S. For \(|S|=1\), the constraints reduce to the Type I constraints (8) with \(|S|=1\), which are valid. Now assume that all constraints for sets with \(|S|=k\) are valid. Take an arbitrary set of cardinality \(k+1\) and assume it has the form \(\hat{S} \cup \{i_0\}\), where \(i_0 \notin \hat{S}\) is an arbitrary node in that set. By the induction hypothesis we have for the set \(\hat{S}\): \(f_{\hat{S}} (\varvec{u}) \ge 0\). It suffices to show that \(f_{\hat{S} \cup \{i_0\}} (\varvec{u}) \ge 0\).
We consider two cases. First, assume that \(f_{\hat{S}} (\varvec{u})\ge 1\). Using definition (10), we have:
Due to the binary nature of the variables in the right hand side of Eq. 16 we have \(f_{\hat{S} \cup \{i_0\}} (\varvec{u})-f_{\hat{S}} (\varvec{u}) \ge -1\). Since \(f_{\hat{S}} (\varvec{u})\ge 1\), we obtain \(f_{\hat{S} \cup \{i_0\}} (\varvec{u}) \ge 0\).
Now consider the case that \(f_{\hat{S}} (\varvec{u})=0\). If \(u_{i_0}=0\), from the right hand side of (16), we obtain \(f_{\hat{S} \cup \{i_0\}}(\varvec{u})-f_{\hat{S}} (\varvec{u}) \ge 0\), which yields \(f_{\hat{S} \cup \{i_0\}}(\varvec{u}) \ge 0\). If \(u_{i_0}=1\), define \(\sum _{i \in \hat{S}} u_i=\bar{k}\). Consequently, the following equality holds using (10) and \(f_{\hat{S}} (\varvec{u})=0\):
Denote \(\bar{S}\) the subset of \(\hat{S}\) corresponding to energized nodes: \(\bar{S}= \{ i \in \hat{S}: u_i=1\}\), with \(|\bar{S}|=\bar{k}\). Define the auxiliary undirected graph \(\bar{G} = (V_{\bar{G}},E_{\bar{G}})\). The node set is \(V_{\bar{G}}=\bar{S} \cup \{i_0\} \cup \{s\}\), where s is a dummy super-node which corresponds to an aggregation of all generators and of all nodes \(N {\setminus } (\hat{S} \cup \{ i_0 \})\). To get the edge set \(E_{\bar{G}}\): We add an edge between \( i \in \bar{S} \cup \{i_0\}\) and \(j \in \bar{S} \cup \{i_0\}\) if \(u_{ij}=1\). Between \(i \in \bar{S} \cup \{i_0\}\) and s we add \(\sum _{j \in N {\setminus } (\hat{S} \cup \{ i \}): (ij) \in E} u_{i j} + \sum _{g \in G(\{i\})} u_g \) edges. Now observe that the value of the left hand side of Eq. (17) is exactly the number of edges of \(\bar{G}\) that have at least one endpoint in the set \(\bar{S}\) (note that even though \(\bar{G}\) contains no edges associated with generator variables or edge variables connected to nodes in \(\hat{S} \setminus \bar{S}\), these variables are all zero due to inequalities (2a) and (2b) because the nodes in \(\hat{S} \setminus \bar{S}\) are de-energized).
Since the vector \(\varvec{u}\) is feasible for H, from every energized node i (i.e., node with \(u_i = 1\)) on graph (N, E), there is a path of energized edges in E leading to a node with an energized generator in G. In the context of graph \(\bar{G}\), that means there exists a path from every node in \(\bar{S} \cup \{i_0\}\) to node s. That implies that graph \(\bar{G}\) is connected. The graph has \(\bar{k}+2\) nodes, so it must have at least \(\bar{k}+1\) edges. Exactly \(\bar{k}\) edges have at least one endpoint in \(\bar{S}\), due to (17). Therefore, there is at least one edge with no endpoints in \(\bar{S}\), i.e. there is an edge between \(i_0\) and the dummy node s. By the construction of the edge set of the graph \(\bar{G}\), this implies \(\sum _{j \in N {\setminus } (\hat{S} \cup \{ i_0 \}): (i_0j) \in E} u_{i_0 j} + \sum _{g \in G(\{i_0\})} u_g \ge 1\), which together with (16) and \(f_{\hat{S}} (\varvec{u})=0\) leads to \(f_{\hat{S} \cup \{i_0\}} (\varvec{u}) \ge 0\). This concludes the proof by induction. \(\square \)
1.2 B.2. Proof of remark 1
Remark 2
(Remark 1.) The continuous relaxation region defined by the family of Type II cuts (11) is neither stronger nor weaker than that of the family of Type I cuts (8).
Proof of remark 1
The family of Type II cuts is neither stronger nor weaker than the family of Type I cuts we introduced before. To see that, first consider a graph with two nodes \(N=\{1,2\}\), one branch \(E=\{(1,2)\}\), and two generators, g(1) connected to node 1 and g(2) connected to node 2. Consider the point \((u_1, u_2, u_{12}, u_{g(1)},u_{g(2)})=(1, 1, 1/2, 1/2, 1/2)\). This point satisfies all the Type I constraints. However, it violates the Type II constraint for \(S=\{1,2\}\), i.e. \(u_{g(1)} + u_{g(2)} + u_{12} \ge u_1 + u_2\).
Conversely, consider the graph with \(N=\{1, 2, 3\}\), edges \(E=\{(1,2), (1,3), (2,3)\}\) and one generator g(1) connected to node 1. The point: \((u_1, u_2, u_3, u_{12}, u_{13}, u_{23}, u_{g(1)}) = \) (1/2, 1/2, 1/2, 1/2, 1/2, 1/2, 0) satisfies all constraints of Type II, but violates \(u_{g(1)} \ge u_1\), the Type I constraint for \(S = N\) for node \(1 \in S\).
1.3 B.3. Proof of proposition 4
Proposition 12
(Proposition 4.) For a given, possibly fractional, \(\varvec{u} \in [0,1]^d\), \(f_S (\varvec{u})\) is a submodular function of \(S \subseteq N\).
Proof of proposition 4
Consider two sets \(A, B \subseteq N\) with \(A \subseteq B\) and \(i_0 \notin B\). We show that \(f_{A \cup \{i_0\}} (\varvec{u})-f_A (\varvec{u}) \ge f_{B \cup \{i_0\}} (\varvec{u})-f_B (\varvec{u})\). Using (16), the above inequality reduces to:
which is satisfied, since \(A \subseteq B \implies N {\setminus } (A \cup \{ i_0 \}) \supseteq N {\setminus } (B \cup \{ i_0 \})\) and the variables \(u_{ij}\) are non negative.
1.4 B.4. Proof of corollary 1
Corollary 2
(Corollary 1.) Constraints (11) can be separated in polynomial time.
Proof of corollary 1
Given a fractional point \(\varvec{u}\), minimizing \(f_S(\varvec{u})\) over \(S \subseteq N\) can be achieved in polynomial time due to submodularity (see [6]). If the optimal objective is negative, the minimizer \(S^{*}\) yields a violated constraint from (11). If the minimizer is non-negative, (11) is satisfied for all \(S \subseteq N\).
C. Proof of propositions of sect. 4.4
For the results of this section, we assume that the graph (N, E) is complete and there is one generator on every bus (assumption 1). For notational convenience, we assume an arbitrary ordering of the nodes \(\{ 1, \dots , |N| \}\) (where the corresponding generators are \(\{ g(1), \dots , g(|N|) \}\)).
1.1 C.1. Proof of proposition 5
Proposition 13
(Proposition 5.) Let assumption 1 hold. The convex hull of the feasible region H, \(\text {conv}(H)\), is a full-dimensional polyhedron.
Proof of proposition 5
The convex hull is a polyhedron since the set of feasible points is finite. We show that its dimension is \(d = |N|+|E|+|G|= 2 |N| +|E|\) by identifying \(d+1\) affinely independent points. Since the point \(\varvec{u}=0\) is feasible, it suffices to find d linearly independent feasible points. Consider the following points:
-
1.
\(\varvec{u}^{a_i}, i \in N\): Only node i and the corresponding generator g(i) are energized. (|N| points)
-
2.
\(\varvec{u}^{b_{ij}}, (i j) \in E\): Only two nodes i, j, the corresponding generators, and the edge connecting them are energized. (|E| points)
-
3.
\(\varvec{u}^{c_{1j}}, j \in N \setminus \{1\}\): Only node 1 with generator g(1), node j, and edge \((1j) \in E\) are energized. (\(|N|-1\) points)
-
4.
\(\varvec{u}^{d}\): Only node 1, node 2 with its generator, and edge (12) are energized. (1 point)
We show that the standard basis for \(\mathbb {R}^d\) can be generated using linear combinations of the points above. Hence, the points span \(\mathbb {R}^d\), and since there are d of them, they are linearly independent. To generate a vector \(\varvec{u}\) with only nonzero coordinate \(u_g =1\), for \(g \in G(i), i \in N\): For \(i = 1\), we simply need to subtract \(\varvec{u}^{d}\) from \(\varvec{u}^{b_{12}}\). For \(i \ne 1\), we need to subtract \(\varvec{u}^{c_{1i}}\) from \(\varvec{u}^{b_{1i}}\). To generate a vector \(\varvec{u}\) with only nonzero coordinate \(u_i =1\) for \(i \in N\), we can simply subtract the standard basis vector with only \(u_g = 1, g \in G(i)\), generated previously, from \(\varvec{u}^{a_i}\). Finally, to generate a vector with only nonzero coordinate \(u_{ij} = 1\), \((ij) \in E\), we form \(\varvec{u}^{b_{ij}} - \varvec{u}^{a_i} - \varvec{u}^{a_j}\). This completes the proof.
1.2 C.2. Proof of proposition 6.
Proposition 14
(Proposition 6.) Let assumption 1 hold. Constraints (8) with \(|S| = 1\), i.e.:
are facet defining for \(\text {conv}(H)\).
Proof of proposition 6
Since the convex hull of H is full-dimensional, it suffices to find d affinely independent points in H that satisfy (12) with equality. One of them is the zero vector, so it suffices to find \(d-1\) linearly independent points in H that satisfy (12) with equality. These are:
-
1.
We first consider points that have \(u_n = 0\), \(u_{g(n)} = 0\), and \(u_{nj} = 0, j \in N\). Since these are the only variables in (12), the constraint is satisfied with equality. The variables corresponding to nodes \(N \setminus \{n\}\), their generators, and the edges with both their endpoints between them (we refer to these variables collectively by \(\varvec{u}_R\)) can be chosen freely in a way that satisfies the IE constraints of a graph with \((|N|-1)\) nodes and generators and \((|E|-|N|+1)\) edges. Using the argument in the proof of proposition 5, we can find \(2(|N|-1) + (|E|-|N|+1)= |N| + |E|-1\) feasible linearly independent points in this reduced space, which correspond to linearly independent points in the full space (where we have set the remaining variables equal to zero).
For the remaining points, the variables \(\varvec{u}_R\) are set equal to 1. We then choose:
-
2.
For \(j \in N \setminus \{n\}\), set \(u_n = 1\), \(u_{g(n)}=0\), \(u_{nj} = 1\), \(u_{nk} = 0, k \in N {\setminus } \{n, j\}\). This yields \(|N|-1\) points that are linearly independent from each other and from all previous points since each one has a nonzero value at a position all previous ones did not have (i.e., \(u_{nj}\)).
-
3.
Set \(u_n = 1\), \(u_{g(n)}=1\), \(u_{nj} = 0, j \in N {\setminus } \{n\}\). This yields 1 point linearly independent from the previous ones, since it is the only one that has \(u_{g(n)}=1\).
Therefore, we generated \((|N| + |E|-1) + (|N|-1) + 1 = 2 |N| +|E| -1 = d -1 \) linearly independent points in H, which concludes the proof.
1.3 C.3. Proof of proposition 7
Proposition 15
(Proposition 7.) Let assumption 1 hold. Constraints (8) with \(S = N\), i.e.:
are facet defining for \(\text {conv}(H)\).
Proof of proposition 7
We prove the statement with \(n =1\), for notational convenience. The zero vector satisfies (13) with equality, so we only need to find \(d-1\) linearly independent points in H that satisfy (13) with equality. We generate d points (that are linearly dependent) and we show they span a \(d-1\) dimensional subspace - hence there exists a subset of \(d-1\) points that are linearly independent. These points are:
-
1.
\(\varvec{u}^{e_i}, i \in N\): Generator g(1), nodes \(1, 2, \dots , i\), and edges \((1,2), (2,3), \dots , (i-1,i)\) are energized. The rest of the system is de-energized. Note that \(\varvec{u}^{e_1}\) refers to the case where only \(\varvec{u}^{e_1}_{g(1)} = 1, \varvec{u}^{e_1}_1 = 1\), and the rest of the network is de-energized. (|N| points)
-
2.
\(\varvec{u}^{f_{i}}, i \in N\): All nodes and edges are energized. Only the generator g(i) (of node i) is energized and the others are not. (|N| points)
-
3.
\(\varvec{u}^{h_{ij}}, (ij) \in E\): All nodes are energized. All edges are energized, except edge (ij). Only generator g(1) is energized and the rest are not. (|E| points)
We show the points above span a \(d-1\) dimensional space by generating the columns of the following \(d \times (d-1)\) full rank matrix:

where \(\varvec{I}\) denotes the identity matrix and \(\mathbbm {1}\) the matrix of all ones. More specifically: to generate a vector with only nonzero coordinate \(u_{ij} = 1\), for \((ij) \in E\), we form \(\varvec{u}^{f_1} - \varvec{u}^{h_{ij}}\). To generate a vector with only nonzero coordinate \(u_i = 1\), \( i \in N {\setminus } \{ 1 \}\), we form the vector \(\varvec{u}^{e_i} - \varvec{u}^{e_{i-1}} + \varvec{u}^{h_{i-1, i}} - \varvec{u}^{f_1}\). Finally, we can generate a vector with only nonzero entries \(u_{g(i)} = 1, u_1 =1\), for some \(i \in N\), by forming: \(\varvec{u}^{e_1} + \varvec{u}^{f_{i}} - \varvec{u}^{f_{1}}\). This completes the proof.
1.4 C.4. Proof of proposition 8
Proposition 16
(Proposition 8.) Let assumption 1 hold. Constraints (11) with \(S = N\), i.e.:
are facet defining for \(\text {conv}(H)\).
Proof of proposition 8
We assume without loss of generality that when we refer to an edge \((ij) \in E\), we have \(i<j\). The zero vector satisfies (14) with equality, so we only need to find \(d-1\) linearly independent points in H that satisfy (14) with equality. These are:
-
1.
\(\varvec{u}^{a_i}, i \in N\): Only node i and the corresponding generator g(i) are energized. (|N| points)
-
2.
\(\varvec{u}^{k_{ij}}, (ij) \in E\): Only nodes i, j, edge (ij) and generator g(i) are energized. (|E| points)
-
3.
\(\varvec{u}^{l_{i}}, i \in N \setminus \{ 1\}\): Only nodes 1, i, edge (1i) and generator g(i) are energized. (\(|N|-1\) points)
We show these points span a \(d-1\) dimensional subspace by showing we can use them to generate all columns of the full rank \(d \times (d-1)\) matrix:

To generate a column with \(u_{g(i)} =1, u_1 = 1\), for some \(i \in N\), we form: \( \varvec{u}^{l_{i}} - \varvec{u}^{k_{1i}} + \varvec{u}^{a_1}\) for \(i \ne 1\) and \(\varvec{u}^{a_1}\) for \(i = 1\). To generate a column with \(u_1 = -1, u_i = 1\), for \(i \in N {\setminus } \{ 1\}\), we form \(\varvec{u}^{a_i} - \varvec{u}^{a_1} - \varvec{u}^{l_{i}} + \varvec{u}^{k_{1i}}\). Finally, to generate a column with \(u_1 = 1, u_{ij} = 1\), for some \((ij) \in E\), we form \(\varvec{u}^{k_{ij}} - \varvec{u}^{a_i} - \varvec{u}^{a_j} + \varvec{u}^{a_1} + \varvec{u}^{l_{j}} - \varvec{u}^{k_{1j}}\). This concludes the proof.
D. Proof of proposition 9
Proposition 17
(Proposition 9) For a given \(t \in T\), assume (1d) and (1n) hold and that the variables \(\{ u_g^t \}_{g \in G}, \{ u_{CR_g}^t \}_{g \in G}, \{w_g^t\}_{g \in G}, \{ w_g^{t-T_{CR_g}} \}_{g \in G}\), \(\{ u_i^t \}_{i \in N}, \{u_{ij}^t \}_{(ij) \in E}\) are in [0, 1]. Then, the system (1p)-(1t) has a solution with respect to \(\{p_g^t\}_{g \in G}\), \(\{ p_{ij}^t \}_{(ij) \in A}\), \(\{p_{SH_i}^t \}_{i \in N}\) if and only if (15) hold for all \(S \subseteq N\).
Proof of proposition 9
We will take take an indirect approach in showing the result in order to illustrate the separation algorithm we used in our implementation, which is based on minimum cut. The theorem can alternatively be derived from Hoffman’s circulation theorem.
We equivalently transform the network to one with non-negative flows. For that, we define for a given \(t \in T\):
Since (1d) and (1n) hold, and \(0 \le {P}_g^\text {min} \le {P}_g^\text {max}\), it directly follows that \(\hat{P}_g^{t, \text {max}} \ge 0\). Now, recall that the edge set A is a set of directed edges that correspond to the branches of the power system by arbitrarily picking a “from” and “to” direction for each branch. We also define a (directed) edge set \(\tilde{A}\) based on the edge set A which contains both the arcs (ji) and (ij) for every arc \((ij) \in A\). That way, every flow \(p_{ij}^t\) satisfying (1r) in A can be decomposed into two non negative flows in \(\tilde{A}\) with \(\hat{p}_{ij}^t = \text {max} (0, p_{ij}^t)\) and \(\hat{p}_{ji}^t = \text {max} (0, -p_{ij}^t)\) (and conversely we can obtain a flow for A by setting \(p_{ij}^t = \hat{p}_{ij}^t - \hat{p}_{ji}^t\)). Using the above definitions, equations (1p)-(1t) are equivalently expressed:
Note the variables \(p_g^t, p_{ij}^t, p_{SH_i}^t\) are uniquely defined by the variables \(\hat{p}_g^t, \hat{p}_{ij}^t, \hat{p}_{SH_i}^t\) and vice versa via the transformations given above. If we apply the same definitions (19) to (15), we equivalently obtain the following system of equations: For all \(S \subseteq N\),
All that remains to show now is that the system (20) is feasible for \(\hat{p}_g^t, \hat{p}_{ij}^t, \hat{p}_{SH_i}^t\) if and only if (21) holds for all \(S \subseteq N\).
Proposition 18
Under the assumptions of proposition 9, system (20) has a solution with respect to \( \{\hat{p}_g^t\}_{g \in G}\), \(\{ \hat{p}_{ij}^t \}_{(ij) \in A}\), \(\{ \hat{p}_{SH_i}^t \}_{i \in N}\) if and only if system (21) is satisfied.
Proof of proposition 18
Assume (20) has a solution with respect to \( \{\hat{p}_g^t\}_{g \in G}\), \(\{ \hat{p}_{ij}^t \}_{(ij) \in A}\), \(\{ \hat{p}_{SH_i} \}_{i \in N}\). Given a set \(S \subseteq N\), by summing equations (20d) for \(i \in S\), we obtain:
Due to (20a)–(20c), the left hand side of the above equation is non negative and the right hand side is less than or equal to \(\sum _{i \in S} \hat{P}_{D_i}^t + \sum _{(ij) \in \delta (S)} \bar{S}_{ij} u_{ij}^t \). This yields equation (21a). Furthermore, again due to (20a)–(20c), the right hand side of the above equation is greater than or equal to \(\sum _{i \in S} \hat{P}_{D_i}^t \) and the left hand side is less than or equal to \(\sum _{i \in S} \hat{P}_{SH_i}^{t,\text {max}} + \sum _{g \in G(S)} \hat{P}_g^{t, \text {max}} + \sum _{(ij) \in \delta (S)} \bar{S}_{ij} u_{ij}^t \). This yields equation (21b).
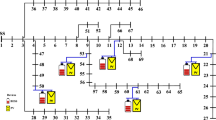
In order to show the reverse implication, we construct the graph of Fig. 4. The node set consists of the power system nodes N, a source node \(n_s\), a sink node \(n_t\), and a node corresponding to generators \(n_G\). We define \(N_{\text {pos}} = \{ i \in N: \hat{P}^t_{D_i} > 0 \}\) and \(N_{\text {neg}} = \{ i \in N: \hat{P}^t_{D_i} < 0 \}\). Note that due to (21a) for \(S = N\), we have that \(\sum _{i \in N} \hat{P}^t_{D_i} \ge 0\).
We add the following directed capacitated edges:
-
1.
From \(n_s\) to \(n_G\), with capacity \(\sum _{i \in N} \hat{P}^t_{D_i} \).
-
2.
From \(n_s\) to \(i \in N_{\text {neg}} \), with capacity \(-\hat{P}^t_{D_i}\).
-
3.
From \(j \in N_{\text {pos}} \) to \(n_t\), with capacity \(\hat{P}^t_{D_j}\).
-
4.
From \(i \in N\) to \(j \in N\) if \((ij) \in \tilde{A}\), with capacity \(\bar{S}_{ij} u_{ij}^t\)
-
5.
From \(n_G\) to \(i \in N\) with capacity \( P_{SH_i}^{t,\text {max}} + \sum _{g \in G(i)} \hat{P}_g^{t, \text {max}}\).
We now show that, if (21) holds, the minimum \(n_s - n_t \) cut in this graph is exactly equal to \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \). In order to show that, we show that every cut is greater than or equal to \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \). Since the cut \(S = \{ n_s, n_G, N \}\), \(T = \{n_t\}\) has exactly that capacity, it is a minimum cut.
Indeed, we have two cases: If node \(n_G\) belongs to T, the capacity of the cut is:
which is greater than or equal to \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \) due to (21a) applied to set S. If node \(n_G\) belongs to S, the capacity of the cut is:
which is greater than or equal to \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \) due to (21b) applied to set T.
Since the minimum cut exactly equals \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \), there exists a corresponding maximum flow of the same value on the graph. Since the flows from \(i \in N_{\text {pos}}\) to \(n_t\) are non negative and upper bounded by \(\hat{P}^t_{D_i} \), and the total flow into \(n_t\) has to equal \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \), we have that the flow from any given \(i \in N_{\text {pos}}\) to \(n_t\) exactly equals \(\hat{P}^t_{D_i} \). Using a similar argument, since \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} = \sum _{i \in N} \hat{P}^t_{D_i} + \sum _{i \in N_{\text {neg}}} (-\hat{P}^t_{D_i})\), the flow from \(n_s\) to \(i \in N_{\text {neg}} \) is equal to \((-\hat{P}^t_{D_i})\) and the flow from \(n_s\) to \(n_G\) is equal to \( \sum _{i \in N} \hat{P}^t_{D_i}\). The remaining flows on the graph yield feasible values for \(\hat{p}_g^t\), \(\hat{p}_{ij}^t\), and \(\hat{p}_{SH_i}^t\) in the system (20). Specifically, the flow on \((ij) \in \tilde{A}\) corresponds to \(\hat{p}_{ij}^t\) and the flow on the edge from \(n_G\) to i corresponds to \(\sum _{g \in G(i)} \hat{p}_g^{t} + \hat{p}_{SH_i}^t\). The flow balance equation for node \(i \in N\) yields (20d).

Graph used to separate constraints (21)
The constraint set (21) can be separated efficiently using minimum cut on the graph in Fig. 4 (the details of its construction are provided in the proof of proposition 18). This separation can be used in a Benders-like scheme and is faster in general than solving the linear program (20). Given a point \(\{ \hat{P}^t_{D_i} \}_{i \in N}\), \(\{ \hat{P}_{SH_i}^{t,\text {max}} \}_{i \in N}\), \(\{u_{ij}^t \}_{(ij) \in E}\), \(\{ \hat{P}_g^{t,\text {max}} \}_{g \in G}\):
-
1.
If \(\sum _{i \in N} \hat{P}^t_{D_i} <0\), add cut (21a) for \(S = N\).
-
2.
If \(\sum _{i \in N} \hat{P}^t_{D_i} \ge 0\), create the graph of Fig. 4:
-
If the minimum \(n_s - n_t\) cut is less than \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \) and \(n_G\) belongs to the sink set T, add cut (21a) for the set T.
-
If the minimum \(n_s - n_t\) cut is less than \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i} \) and \(n_G\) belongs to the source set S, add cut (21b) for the source set S.
-
If the minimum \(n_s - n_t\) cut is equal to \(\sum _{i \in N_{\text {pos}}} \hat{P}^t_{D_i}\), all the constraints (21) are satisfied.
-
The other advantage of having an explicit form for the reformulation (as opposed to only a cut generation scheme) is that we can add some of the constraints a priori, and observe if this improves the quality of bounds. Finally, note that the variables \(\hat{P}_g^{t, \text {max}} \), \(\hat{P}_{SH_i}^{t,\text {max}} \), \(\hat{P}_{D_i}^t \) are only present as parameters in the auxiliary separation problem (21)—the constraints added to the BSA optimization problem are (15), i.e. in the space of the original variables.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Patsakis, G., Aravena, I., Rajan, D. et al. Formulations and valid inequalities for optimal black start allocation in power systems. Energy Syst (2023). https://doi.org/10.1007/s12667-023-00586-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12667-023-00586-z