
Abstract
Two-phase gas–liquid flows are prevalent in many industries and understanding their behaviour would have significant impact on the efficiency of the systems in which they occur. However, information on two-phase gas–liquid flows in \(90^\circ\) bends is limited in the literature and their flow behaviour is not fully understood. One technique that could assist researchers in exploring flow behaviour is visualisation. Accordingly, in this study a two-phase flow experimental investigation was carried out in a large pipe of diameter 150 mm, using water and air at different superficial velocities in order to visualise the effect of \(90^\circ\) bend on two-phase flow behaviour. As optical methods are not suitable for visualising dense bubbly flows due to overlapping of bubbles, in this study, bubble size distribution and void fraction results were obtained using wire-mesh sensors before and after the bend. The results were then post-processed to visualise the flow field. The instantaneous visualisation of flow shows that gas hold-up migrates from the bottom to top wall of the pipe at the bend when the liquid superficial velocity increases for a fixed superficial gas velocity. An increase in superficial gas velocity shows insignificant influence on the gas hold-up at locations beyond the bend for the investigated conditions. This may be due to the centrifugal force imparted by the bend and hence needs further investigation. Bubble size distribution results before and after the bend indicate that the bend has influence on bubble breakup and coalescence.
Graphical Abstract







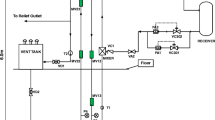
Adapted from Pietruske and Prasser (2007)









Similar content being viewed by others

References
Abdulkadir M, Zhao D, Sharaf S, Abdulkareem L, Lowndes IS, Azzopardi BJ (2011) Interrogating the effect of 90deg bends on air-silicone oil flows using advanced instrumentation. Chem Eng Sci 66(11):2453–2467
Abdulkadir M, Zhao D, Azzi A, Lowndes IS, Azzopardi BJ (2012) Two-phase air–water flow through a large diameter vertical 180\(^{\circ }\) return bend. Chem Eng Sci 79:138–152
Abdulkadir M, Hernandez-Perez V, Lo S, Lowndes IS, Azzopardi BJ (2013) Comparison of experimental and computational fluid dynamics (CFD) studies of slug flow in a vertical 90 bend. J Comput Multiph Flows 5(4):265–281
Aliyu AM, Lao L, Almabrok AA, Yeung H (2016) Interfacial shear in adiabatic downward gas/liquid co-current annular flow in pipes. Exp Therm Fluid Sci 72:75–87
Aliyu AM, Almabrok AA, Baba YD, Lao L, Yeung H, Kim KC (2017) Upward gas/liquid two-phase flow after a U-bend in a large-diameter serpentine pipe. Int J Heat Mass Transf 108:784–800
Almabrok AA, Aliyu AM, Lao L, Yeung H (2016) Gas/liquid flow behaviours in a downward section of large diameter vertical serpentine pipes. Int J Multiph Flow 78:25–43
Bottin M, Berlandis JP, Hervieu E, Lance M, Marchand M, Öztürk OC, Serre G (2014) Experimental investigation of a developing two-phase bubbly flow in horizontal pipe. Int J Multiph Flow 60:161–179
Dean WR (1928) Fluid motion in a curved channel. Proc R Soc A Math Phys Eng Sci 121(787):402–420
Delhaye JM, Cognet G (1984) Measuring techniques in gas–liquid two-phase flows
Detra RW (1953) The secondary flow in curved pipes. The Swiss Federal Institute of Technology, Zurich
Farman Ali S, Yeung H (2015) Experimental study of two-phase air–water flow in large-diameter vertical pipes. Chem Eng Commun 202(6):823–842
França F, Lahey RT (1992) The use of drift-flux techniques for the analysis of horizontal two-phase flows. Int J Multiph Flow 18(6):787–801
Gardner GC, Neller PH (1969) Phase distributions in flow of an air-water mixture round bends and past obstructions at the wall of a 76 mm bore tube. Inst Mech Eng (G B) 184:93–101
Ito D, Prasser HM, Kikura H, Aritomi M (2011) Uncertainty and intrusiveness of three-layer wire-mesh sensor. Flow Meas Instrum 22(4):249–256
Johnson ID (1984) Method and apparatus for measuring water in crude oil. US Patent 4,644,263
Kelessidis VC, Dukler AE, Kelessidist VC, Dukler AE (1989) Modelling flow pattern transitions for upward gas–liquid flow in vertical concentric and eccentric annuli. Int J Multiph Flow 15(2):173–191
Kim S, Fu X, Wang X, Ishii M (2000) Development of the miniaturized four-sensor conductivity probe and the signal processing scheme. Int J Heat Mass Transf 43(22):4101–4118
Mandhane JM, Gregory GA, Aziz K (1974) A flow pattern map for gas–liquid flow in horizontal pipes. Int J Multiph Flow 1(4):537–553
Mathure N (2006) Study of flow patterns and void fraction in horizontal two-phase flow. PhD thesis, Oklahoma State University
MathWorks (2017) MATLAB® data import and export R2017b. https://au.mathworks.com/help/pdf_doc/matlab/import_export.pdf
Mishima K, Ishii M, Kaichiro M, Ishii M, Mishima K, Ishii M (1984) Flow regime transition criteria for upward two-phase flow in vertical tubes. Int J Heat Mass Transf 27(5):723–737
Nuryadin S, Ignaczak M, Lucas D, Deendarlianto (2015) On the accuracy of wire-mesh sensors in dependence of bubble sizes and liquid flow rates. Exp Therm Fluid Sci 65:73–81
Pietruske H, Prasser HMM (2007) Wire-mesh sensors for high-resolving two-phase flow studies at high pressures and temperatures. Flow Meas Instrum 18(2):87–94
Prasser H (2007) Evolution of interfacial area concentration in a vertical air–water flow measured by wire-mesh sensors. Nucl Eng Des 237:1608–1617
Prasser HM, Zschau J, Bottger A (1998) Development of a wire-mesh sensor for the investigation of two phase flow regimes. In: Annual meeting on nuclear technology ’98, proceedings, pp 119–122
Prasser HM, Scholz D, Zippe C (2001) Bubble size measurement using wire-mesh sensors. Flow Meas Instrum 12(4):299–312
Prasser HM, Misawa M, Tiseanu I (2005) Comparison between wire-mesh sensor and ultra-fast X-ray tomograph for an air–water flow in a vertical pipe. Flow Meas Instrum 16(2–3):73–83
Qi FS, Yeoh GH, Cheung SCP, Tu JY, Krepper E, Lucas D (2012) Classification of bubbles in vertical gas–liquid flow: part 1—an analysis of experimental data. Int J Multiph Flow 39:121–134
Qiao S, Mena D, Kim S (2017) Inlet effects on vertical-downward air–water two-phase flow. Nucl Eng Des 312:375–388
Schlegel JP, Sawant P, Paranjape S, Ozar B, Hibiki T, Ishii M (2009) Void fraction and flow regime in adiabatic upward two-phase flow in large diameter vertical pipes. Nucl Eng Des 239(2009):2864–2874
Sharaf S, van der Meulen GP, Agunlejika EO, Azzopardi BJ (2016) Structures in gas–liquid churn flow in a large diameter vertical pipe. Int J Multiph Flow 78:88–103
Shen X, Schlegel JP, Chen S, Rassame S, Griffiths MJ, Hibiki T, Ishii M (2014) Flow characteristics and void fraction prediction in large diameter pipes. In: Frontiers and progress in multiphase flow I. Springer International Publishing, pp 55–103
Spedding PL, Benard E (2007) Gas liquid two phase flow through a vertical 90 elbow bend. Exp Therm Fluid Sci 31:761–769
Taitel Y, Dukler AE (1976) A model for predicting flow regime transitions in horizontal and near-horizontal gas-liquid flow. AIChE J 22(1):47–55
Taitel Y, Bornea D, Dukler AE (1980) Modelling flow pattern transitions for steady upward gas–liquid flow in vertical tubes. AIChE J 26(3):345–354
Vieira RE, Kesana NR, McLaury BS, Shirazi SA, Torres CF, Schleicher E, Hampel U (2014) Experimental investigation of the effect of 90 standard elbow on horizontal gas–liquid stratified and annular flow characteristics using dual wire-mesh sensors. Exp Therm Fluid Sci 59:72–87
Wangjiraniran W, MOTEGI Y, Richter S, Kikura H, Aritomi M, Yamamoto K (2003) Intrusive effect of wire mesh tomography on gas–liquid flow measurement. J Nucl Sci Technol 40(11):932–940. http://www.tandfonline.com/doi/abs/10.1080/18811248.2003.9715436
Yadav MS, Kim S, Tien K, Bajorek SM (2014a) Experiments on geometric effects of 90-degree vertical-upward elbow in air water two-phase flow. Int J Multiph Flow 65:98–107
Yadav MS, Worosz T, Kim S, Tien K, Bajorek SM (2014b) Characterization of the dissipation of elbow effects in bubbly two-phase flows. Int J Multiph Flow 66:101–109
Acknowledgements
The author acknowledges the support received through the provision of an Australian Government Research Training Program in form of a Ph.D. scholarship and RMIT university support. The author also appreciates CSIROs experimental facilities and technical support received from Mr. Andrew Brent.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Safari Pour, S., Mohanarangam, K., Vahaji, S. et al. Visualisation of gas–liquid bubbly flows in a large diameter pipe with 90\(^{\circ }\) bend. J Vis 21, 585–596 (2018). https://doi.org/10.1007/s12650-018-0486-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12650-018-0486-2