
Abstract
This paper presents the first in-orbit results of the modular two-unit (2U) nanosatellite SOMP2b, focusing on the satellite bus itself and its scientific payloads. Launched in January 2021, SOMP2b comprises an innovative highly integrated satellite design with a high payload capacity. It contains the in-situ measurement of atomic oxygen in the thermosphere (FIPEXnano), a thermoelectric generator to investigate waste heat recovery in satellites (TEGonSOMP) and a material experiment to study the behaviour of carbon nanotubes in a space environment (CiREX2). The commissioning of the satellite bus was, in most respects, successful. Despite manageable limitations in communication and attitude functions, the payloads TEGonSOMP and FIPEXnano were successfully commissioned. Regarding the failure of CiREX2, countermeasures in fthe orm of in-orbit software updates are being investigated at the time of this publication.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
At the Institute of Aerospace Engineering of TUD Dresden University of Technology modular nanosatellites are developed as carriers for scientific experiments. Since the beginning of the SOMP2b development stage in 2012, the landscape of nanosatellites has changed significantly. So-called Cubesats and their parts are now commercially available, more capable and mostly focused on scientific missions and payloads [1].
The acronym SOMP2 stands for Student On-orbit Measurement Program followed by the satellite’s counting number, and also aims to train students in the field of space engineering in a practical way. It is the successor of the former Student Oxygen Measurement Project from 2007, which developed a 1U nanosatellite to measure atomic oxygen, test thin film solar cells and demonstrate the ability of a university to fully develop its own satellite bus and payloads [2].
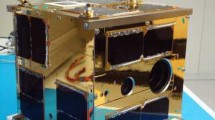
As described above and shown in Fig. 1, SOMP2b is a 2U nanosatellite developed after the CubeSat Standard from Cal Poly and Stanford [3]. Its dimensions are ~ 10 cm × 10 cm × 20 cm and it weighs 1.981 kg, including three scientific payloads (P/L). Since the failure rates of small satellites, especially those developed by educational institutions, are very high [4], SOMP2b aimed to design and build a modular nanosatellite bus that can accommodate multiple payloads and be easily adapted to new payloads.

Overview of SOMP2b subsystems (left) and flight model (right). Shown are (1) payload module including payload controller and payload H/W, (2) Backplane, (3) OBC and battery module, (4) TEGonSOMP, (5) side panel, (6) antenna module including CS module, switches and antennas
SOMP2 had two missions into low earth orbit, designated SOMP2a and SOMP2b, respectively. SOMP2a was launched via Nanoracks with ATLAS-V in 2017, as part of the QB50 mission [17], and deployed from the ISS space station. Unfortunately, no communication could be established with the satellite. The successful successor mission was SOMP2b, via Transporter-1 with Space X’s Falcon 9 rocket in January 2021. It was launched into a retrograde, sun-synchronous orbit, at an altitude of 535km and an inclination of 97°.
This paper aims to provide an overview of the mission, briefly analyse the subsystems in-orbit performances and describe the first scientific payload in-orbit results. Finally, an outlook on the further mission is given. Since the project has a clear educational purpose, this paper also explicitly addresses the errors that occurred during the mission.
1.1 Mission objectives
The goal of SOMP2 development is to operate scientific payloads and to demonstrate the functionality of a highly integrated satellite design. As the educational aspect is one of the fundamentals of the mission, most of the components were developed at TUD with a strong involvement of students. As an educational project, the objectives were set as follows:
-
1.
Education and training of engineering students and scientists.
-
2.
Development of a 2U modular nanosatellite and integration of 3 scientific payloads.
-
3.
In-orbit operation of the satellite and its payloads, testing of the highly integrated side panel’s redundancy and evaluation of scientific results.
1.2 Payload overview
As mentioned, SOMP2b hosts three scientific payloads, namely FIPEXnano, TEGonSOMP and CiREX2.
FIPEXnano is a miniaturized version of the successfully flown FIPEXonISS experiment (Phi-(Θ-Flux)-Probe-Experiments on ISS), which demonstrated in-situ measurement of molecular and atomic oxygen on ESA’s external platform EuTEF, on the International Space Station [5,6,7,8]. It was chosen as one of three main payloads in the QB50 project, and therefore, was foreseen to be the main payload of 14 satellites [9, 10]. The experiment consists of two electrochemical amperometric sensors and is able to in-situ measure and distinguish atomic and molecular oxygen at a partial pressure below 10–6 mbar (see also Sect. 4.1). Its dimensions are approximately 9 cm × 9 cm × 4 cm for the main electrical and structural components, and it is placed on the Z-side of SOMP2b, which shall be pointed in ram direction for consistent measurements. Additionally, the two sensors were extended outwards of the satellite surface to avoid surface influences.
TEGonSOMP aims to demonstrate the possibility of harvesting energy off of the naturally occurring heat flows in a satellite’s structure resulting from environmental radiation [11]. Furthermore, it shall gather data on the degradation behaviour of a miniaturised low-power bulk-type thermoelectrical generator (TEG). A 9.1 mm × 9.9 mm bismuth-telluride-based commercial bulk-TEG was chosen and thermally connected to two copper elements, each housing a temperature sensor. One side is thermally conducted to the backside of a solar panel while the second side only uses thermal radiation towards the inner satellite. For redundancy two assemblies (TEG1 and TEG2) are placed on the Y− and Y + side panels of SOMP2b.
CiREX2 aims to characterise and research the degradation behaviour of carbon nanotubes (CNT) under space conditions, and to compare the results with ground-based environmental tests. CiREX2 houses twenty samples of single- and multi-walled CNTs and also graphene. Twelve samples are exposed to the space environment while the remaining eight are shielded by an anodised aluminium cover plate. Those samples are placed beneath the FIPEXnano sensors on the Z-panel of SOMP2b facing ram direction. As a proxy parameter for the degradation effects the electrical resistance is measured [12, 13].
2 Satellite and mission overview
SOMP2b was completely developed by TUD personnel and students, incorporating the experiences and lessons learned from the first SOMP 1U nanosatellite. Therefore, unlike SOMP, SOMP2b uses two commercial radio modules ‘Lithium Li1’ by Astrodev for UHF communication for reliability reasons, but is still operating in the amateur radio band.
Whereas until then ordinary nanosatellites had been developed mainly for a dedicated payload, the basic idea of the project was, to design a modular nanosatellite, that could theoretically carry multiple payloads, without having to adapt the main features. For this reason, the satellite design was mainly split into three parts shown in Fig. 1:
-
1.
System bus containing batteries, radios, onboard computer (OBC) and backplane (2, 3, 6).
-
2.
Highly integrated and redundant side panels, each containing a full set of attitude determination and control system (ADCS) sensors and magnetorquer, solar panels with maximum power point tracking (MPPT) and a microcontroller (µC) for data pre-processing (5).
-
3.
Dedicated P/L stack containing all payloads with a standardised interface and a payload µC for script handling and data pre-processing (1).
To simultaneously simplify hardware (H/W) and software (S/W) development and increase system redundancy, each side panel is standardised to house all ADCS sensors and actuators, along with the MPPT of each solar panel. This made considerably more space available inside the satellite for payloads. The dedicated payload µC controls script-based P/L operations, switch on and off, data handling and pre-processing of P/L data.

Mission timeline of SOMP2b
SOMP2b was launched at 17:00 Central European Time (CET) on January 24, 2021 on a Space-X’s Falcon 9 rocket as part of the Transporter-1 mission. Carrying 143 satellites, it was the highest number of satellites deployed with one launch at the time. The first status beacons were received at 18:49 CET via a Swedish ground station (G/S) participating in the Satnogs amateur radio satellite ground station network. The first successful contact by TUD G/S was made at 20:17 CET.
At three months, the commissioning of the subsystems took longer than expected due to problems with the G/S (Fig. 2). Nevertheless, all subsystem statuses were nominal and only a few minor and medium S/W bugs were identified during the commissioning process. These were mainly related to the logging function and the formatting of individual data sets in the beacons (e.g., side panel temperatures). Due to the particularly gentle release, the decision was made, not to commission the ADCS for safety, after the correct functionality of the sensors had been tested. Later, problems with the ADCS actuators were encountered.
The first payloads to be commissioned were TEGonSOMP and CiREX2 because of their low demand for electrical power. While the commissioning of the former was successful for one of the two TEGs, CiREX2 could not be operated successfully, although further attempts were made during the following months. Over the next 9 months, four TEGonSOMP measurement campaigns were conducted successfully, and the experiment is still ongoing.
Using an iterative approach to parameter determination, FIPEXnano commissioning was successfully completed after a few weeks. Fine-tuning the sensors takes more time.
At the time of this paper, a new OBC firmware version is currently being uploaded containing bug fixes and extended logging and beacon functions for further ADCS and system analyses. This should also significantly improve communication, by selecting the better-receiving radio module by default.
3 Operation
This chapter briefly presents changes made to the G/S setup after launch and analyses of the in-orbit performance of the electrical power system (EPS), communication systems (CS), ADCS and the OBC.
3.1 Launch and ground segment
In the first hours after launch, the received status beacons showed all systems performing nominally. Over the next overpasses, it was discovered, that the G/S was not capable of transmissions in the UHF band in half duplex mode. This was initially overlooked in pre-flight tests, as the G/S could not be used because of its high transmission power. Hence all tests used a radio similar to the flight radios of SOMP2b and were aimed to test the functioning of the in-house G/S S/W. Switching transmission and reception bands were not feasible considering the low response time of SOMP2b of less than 300 ms (Fig. 3).

Setup and waterfall plot of the SDR evaluation S/W showing the first successfully received beacon by TUD G/S
To solve the problem a relay was added between the low noise amplifier (LNA) and the antenna (see Fig. 4). Thus, the LNA is now connected to a S/W-defined radio receiver using open-source S/W for reception and decoding. In case of a transmission the relay switches automatically to connect the original transceiver to the YAGI antenna. Utilising the already installed 20 dB LNA a commercial RTL-SDR stick was sufficient for reception. It was later changed to the more sophisticated RSPdx by SDRPlay to improve the reception of weak signals in the high-noise environment of the surrounding city for overflights at low altitudes.

Changes made to TUD G/S setup to enable half-duplex mode within the UHF band
3.2 Subsystem in-orbit performance
While commissioning itself was mostly successful, the following sections aim to provide an overview of subsystem in-orbit performance, using key events of the mission.
3.2.1 Electrical power system
SOMP2b’s EPS is based on four side panels housing four solar cells each (meaning 10W peak power per side panel) on both x- and y-axis and one side panel housing only two solar cells on the Z + panel. The Z− panel (pointing in flight direction) is reserved for payloads. For energy storage two lithium-ion batteries with 1950 mAh nominal capacity each were selected. The performance of the EPS is presented using telemetry data of voltage, currents and temperatures.
Figure 5 shows the remaining capacity for both batteries as transmitted by status beacons. The last full discharge cycle was performed in January 2022 after one year mission time and showed no signs of degradation of maximum capacity. Together with the battery voltage levels depicted in Fig. 6 the energy budget of the EPS proofs to be more than sufficient for all standard operations on SOMP2b.

SOMP2b remaining battery capacity of battery 1 and 2 from launch till Jul. 2022 as transmitted by beacons

SOMP2b battery voltage from launch till Jul. 2022
Both figures also show a gap in the data from November 30, 2021 till January 4 2022. During this time, the battery µC responsible for gathering and communicating the EPS data to the OBC could not be reached via the I2C bus. This resulted in missing data and the subsequent automatic attempts to free the communication bus resulted in a very high number of daily OBC resets of approximately 50/d during the time (see also Fig. 12). Every other module on the I2C bus could be reached during this event and the satellite continued to function nominally during eclipse. While in theory, every module of SOMP2b can be remotely power cycled and reset, this does not apply to the battery µC as it is directly connected to the batteries. Thus, the power cycle of the µC is only possible via the deep discharge protection circuit of the additional battery management chip in use. As the only consumer able to overcome the energy budget, FIPEXnano was switched on with a continuous script and successfully triggered the deep discharge cut-off within 24 h. Since then, the EPS has been in nominal operation.
All solar panels perform as expected. While the current monitor of Y + panel does not show any generated power, its correct functioning was verified through observing, that the total battery charging current is higher than the sum of the individual panel currents when Y + is facing the sun. Therefore, it was concluded, that the issue is only a non-functioning sensor. The peaks seen in Fig. 7 after September 2021 are due to less additional beacons captured by the Satnogs network as interest in individual satellites decreases over the mission timeline.

Current generated by SOMP2b’s solar panels from launch till Jul. 2022
The wavy patterns shown in Figs. 5, 6, 7, 8 are due to the non-integer number of orbits per day and the resulting periodically changing overflight time over TUD G/S.

SOMP2b inner and surface temperatures from launch till Jul. 2022. Due to a beacon error the surface temperatures are sourced from the TEGonSOMP experiment
The temperatures of battery 1, OBC and side panel are plotted in Fig. 8 using telemetry data for both the battery and the OBC and using TEG experiment data for the side panel. The temperature swings depicted are in the expected range for low earth orbit (LEO) satellites without an active thermal regulation system and coincide with reports from other nanosatellites [14,15,16].
The highest absolute values and gradients were recorded on the side panels in the range of ± 30 °C. Due to the aforementioned error in beacon definition, those are currently only recorded by the TEGonSOMP experiment but will be recorded nominal after the OBC firmware update. Typical OBC temperature gradients swing about 25K and the batteries approximately 9K per orbit due to additional multi-layer insulation applied. Although both values are in the same absolute temperature range of ± 20 °C the OBC temperatures range slightly higher due to excess process heat.
3.2.2 Communication system
Unlike the first SOMP satellite, it was decided to use a fully developed radio module with flight heritage for reasons of reliability. The SOMP2b communication module consists of two redundant Astrodev Lithium Li1 radios each connected to its own pair of dipole UHF antennas.
Oscillations in the signal intensity during longer file transfers from orbit show an imperfect omni-directionality of the antennas, which could not be proven in previous far-field tests on the ground. In combination with the unintended rotation rate of the satellite (see Sect. 3.2.3), these imperfections cause the link budget to be exceeded during certain orientations of the spacecraft (Fig. 9).

Spectral waterfall plot of a 90s SOMP2b file download. Changes in intensity illustrate imperfect omni-directionality of dipole UHF antenna
Despite both modules working flawlessly from the beginning, there are significant differences in performance that were neither expected nor existent in the pre-flight tests.
While downlink signal-to-noise ratio is very similar for both modules, uplink performance is different. Reliable communication is possible for an elevation higher than 40° with module 1 but already from 20° with module 2. As this was not expected, the standard module after an OBC reset is always module 1. SOMP2b will switch modules automatically every 48h without communication from TUD G/S.
With the next F/W update module 2 is set to be the standard module, and the ability to switch modules via command from ground has been implemented as well.
3.2.3 Attitude determination and control system
As mentioned in Sect. 2 no detumbling was necessary after deployment. After confirming the correct function of the attitude determination sensors, it was decided to not further commission the ADCS until necessary. A small increase and later decrease of rotation around z-axis in the first 5 months (see Fig. 10) was attributed to outgassing or thermal effects as no active components of the ADCS were active during this time frame. The investigation on this matter has not yet been concluded. There were no significant differences in payload and satellite operation between periods of increasing and decreasing rotation rates. Therefore, a systematic effect such as unwanted magnetic torques due to nominal current flow in the satellite does not appear to be solely responsible. However, both effects are of the same order of magnitude and may have overlapped.
As is shown in Fig. 11, in June 2021 with the first activation of FIPEXnano the heat up of the sensor induced a rotation around the x-axis. The cause could be a possible outgassing of the sensor after being inactive for a long time, as the sensors are offset from the centre of mass of SOMP2b. The simultaneous reduction in the change of rate of rotation about the y-axis may also be due to this. However, since this already slowed down before the start of the experiment, it cannot be said with certainty.

SOMP2b turning rate telemetry from launch till Jul. 2022

Turning rates of SOMP2b and the change induced by the first heating of the FIPEXnano sensors
As mitigation, the ADCS was activated but malfunctioned. After the first activation, SOMP2b started tumbling and the dedicated detumbling mode reproducible triggers an OBC reset after a short time.
The problem could not be reproduced with the ground model. As of the writing of this paper, ADCS is still not functional and we await the finished firmware update for improved logging functions to further investigate.
As explained in Sect. 3.2.3, the faulty behaviour of the ADCS leads to significantly worse communication than expected at the beginning of the mission. This increases in particular the time required for downloading the payload data and thus the response time for scheduling the different experiments.
3.2.4 On-board computer
From the very beginning, SOMP2b OBC is experiencing approximately one reset event per day on average. Periods of higher rates of resets alternate with periods of lower rates. Longest successful operation without reset was 9 days. The high frequency of resets has been attributed to I2C bus communication failures between OBC and battery µC (the ground model has run without resets for up to 1 month when deactivating the battery status task in the OBC program code). In December 2021 the battery µC was not reachable on the main bus, but all other components were. As the battery status task can only be deactivated with a firmware update, about 50 daily OBC resets occurred during that time frame. A power cycle of the battery µC was forced, when activating FIPEXnano for 24 h exceeded the energy budget and triggered a deep discharge shutdown from the battery management chip. Since then, the rate of OBC resets is back to normal.
While the average reset rate does not interfere with satellite and payload operations, timeframes with higher reset rates interfere especially with the TEG operations which include continuous measurements over 6 h (Fig. 12).

SOMP2b reset events and Bat1 Voltage from launch till Jul. 2022
4 First results of payload operation
This chapter presents an overview of the commissioning challenges and the first results of FIPEXnano, TEGonSOMP and CiREX2.
4.1 FIPEXnano
FiPEXnano attempts to in-situ measure the highly reactive atomic oxygen of the thermosphere along the satellite’s orbit. Atomic oxygen is the dominant species in this region and its capability of eroding spacecraft materials can pose serious concerns. For correlation and validation of atmospheric models measurement results are crucial [9]. So far, reversible, time-determined, on-site measurements exist only along the orbit of the ISS, but the behaviour at higher latitudes is known only from sporadic, remote sensing measurements [6, 9].
The working principle of the sensor is described in detail in [6, 7]. Here, the small ceramic-based sensor (2.5 × 2.5 × 0.5 mm3) operates at elevated temperatures of 600–700 °C to enable the electrochemical reaction and to conduct oxygen ions through yttrium-doped zirconia-based solid-state electrolytes. The applied voltage forces the current of oxygen ions proportional to the oxygen mass flux. Therefore, the sensor needs to operate in free molecular flow and its direction of motion needs to be known.
FIPEXonISS was an experiment on the COLUMBUS External Payload Facility EuTEF (European Technology Exposure Facility). It provided the first measurements of the time-resolved behaviour of atomic oxygen and oxygen molecules. Further miniaturisation of the sensor and its electronics enabled its use on the QB50 nanosatellites with very limited results [17]. A revision of this sensor system [8] has now been integrated into SOMP2b.
For the safety and protection of the EPS, the design of FIPEXnano requires that each sensor can only be operated individually and not simultaneously to comply with a wide range of nanosatellites from the former QB50 program (Fig. 13).
The experiment was first activated on June 21, 2022 with the first commissioning script, which briefly heats up each sensor once using only half of the available heater power. No sensor data is gathered during this script. After the correct functionality of the electric components had been verified, the second commissioning script was activated. Using each sensor for 20 min it aimed to prove the correct functioning of the sensor pair.

Change of battery current of SOMP2b during eclipse with FIPEXnano activated
The first results as depicted in Fig. 14 show the drawn currents for each sensor over the complete duration of the script. Gaps in the graph resulted from non-ideal communication during downlink (see also Sect. 3.2.2). It was deemed too much effort to retry until every set was completely downloaded correctly as the broad sensor data was clear. Starting during an eclipse the measurement data of Sensor 1 looked promising as the level of atomic oxygen is expected to rise closing in on sunrise [6]. Furthermore, the peaks before sunrise correctly show the rotation of SOMP2b around the x-axis. By aligning the sensors periodically in the ram and wake direction the partial pressure of oxygen oscillates accordingly [6]. After sunrise, the sensor current was expected to rise significantly but instead it drops and levels off. This was attributed to a possible saturation of the sensor after the long time span between integration and first activation. This problem should later resolve itself with more time in the hot state.

First results of FIPEXnano commissioning script. Depicted are the sensor currents as resulting from the residual oxygen in the space environment
After 20 min of measurement time, FIPEXnano switched to sensor 2. As the two sensors differ in design the sensor current is not directly comparable. With the first minutes again correctly showing SOMP2b’s rotation with a rising level as expected when getting closer to the equatorial plane [6]. The following levelling off, decrease and re-increase of sensor current could not be explained by the standard thermosphere models.
Later measurements led to the discovery of an S/W error in the automatic measuring range switching, which leads to overshooting of the sensor (see Fig. 15). With the preselected sets of parameters this occurred at every measurement and does not end on itself. Further efforts will therefore concentrate on fine-tuning control parameters of the very sensitive sensor to prevent a change of measurement range during one orbit. Since the environment cannot be replicated exactly in the laboratory, this could not be predicted by tests on the ground either. It is especially challenging to set the electrochemical equilibria on the sensor because the potentials are affected by atomic oxygen at about one-millionth of the ambient pressure. After the mission is completed, the results will be published in detail.

FIPEXnano sensor current with overshooting
4.2 TEGonSOMP
TEGonSOMP should contribute to the evaluation of the usability of so far unused heat for the electrical energy supply. This is particularly interesting for nanosatellites, which on the one hand generate little electrical power due to the small solar cell area and on the other hand are designed for low power levels. It should be noted that studies show that solar-radiated heat of up to 25 watts/1U cubesat is absorbed and unused [11, 18]. The TEG experiment is intended to provide experience in the integration and operation of energy harvesting methods rather than supply the SOMP2b satellite [18].
TEGonSOMP consists of two thermoelectric generators each thermally connected to two copper plates. One plate is connected to the back of solar cells on opposite side panels of SOMP2b, the other uses thermal radiation towards the inner satellite. The electrical components are placed on one PCB in the main payload stack (see Fig. 1) and two smaller PCBs for voltage and temperature measurement placed on the inside of the according side panels. For the three measurement programmes a resistor array is used to connect different loads to the TEG. By default, the TEGs are connected to two super capacitors (Fig. 16).

Setup of one thermoelectrical generator on SOMP2b side panel. Depicted are (1) copper radiation plate facing the inner side of the satellite, (2) TEG_therm PCB for voltage and temperature measurement, (3) peak extension frame on the side panel to accommodate TEG volume and (4) Solar cells mounted on an aluminium panel connected to outer copper shielding of TEG
TEGonSOMP was first activated on March 05, 2021. It was chosen as the first P/L to activate because of its low power consumption of approximately 60 mW. Its function was determined by the elevated power consumption on the 3V3 bus and the corresponding beacon information (Fig. 17).

3V3 bus current of SOMP2b with elevated level caused by activation of TEGonSOMP
The ‘Characterization Mode’ uses a resistor network to apply different loads, and measures the resulting voltage drops to calculate the corresponding characterisation curve. Figure 18 presents different sections of the TEGonSOMP measurement campaign from June 2021. The first subplot depicts 27 orbits of temperature measurements showing an approximately constant maximum gradient between maximum and minimum temperatures per orbit of 50K. The second subplot highlights the change of gradient between the outer and inner temperature of TEG2, therefore confirming the approach of the experiment to use said gradient in the sun and shadow phase. Subplot three depicts the voltage drop of TEG2 caused by the switching of load resistors.

Temperatures measured by TEGonSOMP in June 2021. Pictured above are TEG1 inner and outer temperatures over 27 orbits (~ 43 h). Middle figure pictures the change of temperature gradient of TEG2 inner and outer side over one orbit. Bottom figure pictures the resulting voltage drop on TEG2 when switching load resistors
While TEG2 is running in nominal mode, the connection between TEG1 and the associated resistor network seems to be disrupted. Therefore, TEG1 is only measuring temperatures and open circuit voltage.
Figure 19 shows the recorded characterisation curves of TEG2. The generated power over temperature gradient is comparable to the datasheet and pre-flight ground tests [19, 20]. It depicts approximately half of the theoretical ideal maximum efficiency.

Power generated by TEG2 on SOMP2b depicted over the temperature gradient from outer to inner thermal element. The different curves result from different load resistors connected to the TEG
The second measurement mode is the so-called ‘Degradation mode’. It uses a fixed load resistance and a longer measurement interval to allow long-term comparison of TEG performance in space. TEG2 has been operated successfully in this mode as well. Detailed reporting and discussion of the results are planned after the end of the mission of SOMP2b.
4.3 CIREX2
CiREX2 is based on the formerly developed CiREX [12] and consists of two sample carriers holding ten samples each and the main electrical PCB. Sensor board 1 includes four multi-walled carbon nanotube composite, four multi-walled carbon nanotubes and two graphene samples. Sensor board 2 includes four single-walled carbon nanotubes, four multi-walled carbon nanotubes and two graphene samples. In addition to the material probes themselves, each sensor board also includes photodiodes and temperature sensors for reference measurements. Eight of the twenty material samples are shielded against low-energy irradiation and direct solar radiation through an aluminium cover plate of ~ 1 mm thickness (Fig. 20).

CiREX2 sensor board overview. Upper left: samples integrated and bonded with gold contacts onto Sensor board 1. Lower left: Back side of sensor board 1 with overvoltage protection and connector. Right: Sensor boards and aluminium cover plates integrated into the FIPEXnano structure without FIPEXnano sensors installed
The ‘Science’ mode of CiREX2 only requires two parameters to be set by the P/L interface controller: Measurement interval and number of measurements to be taken. The commissioning plan was to start with short measurements to verify the measurement H/W, and then extend the measurements. Due to the low power consumption of ~ 140 mW in active mode, CiREX2 should later run almost continuously, limited only by the data rate of the downlink.
Although noted as active in the status beacons and visible in the increased energy consumption of the satellite, no data was available in the memory of the payload interface after the measurements were completed according to the script. Several attempts to solve the problem failed. Also, the problem could not be reproduced with the CiREX2 and SOMP2b ground models.
5 Conclusion
From launch in January 2021 till today SOMP2b has been operated successfully for 20 months. During the commissioning phase, several difficulties regarding ADCS, communication, and onboard data handling were encountered and partially resolved. Commissioning of the payloads was partly successful, with TEGonSOMP in full scientific mode since March 2021, and FIPEXnano running but with difficulties in parameter fine-tuning. CiREX2 could not be operated successfully. While still ongoing, the mission of SOMP2b is already a partial success, generating important scientific data and lessons learnt for future satellite and payload development at TUD. The approach of combining in-house built and commercial subsystems was very successful. One of the most important lessons learned regarding H/W development was to perform longer and more thorough test campaigns after complete assembly and integration of the satellite. Regarding S/W, a modular approach would make firmware updates easier, therefore enabling the team to react more quickly to unforeseen events.
Data Availability
Not applicable.
References
Liddle, J.D., Holt, A.P., Jason, S.J., O’Donnell, K.A., Stevens, E.J.: Space science with CubeSats and nanosatellites. Nat. Astron. 4, 1026–1030 (2020). https://doi.org/10.1038/s41550-020-01247-2
Fasoulas, S., Schmiel, T.: SOMP-TUD CubeSat der TU Dresden—Bau eines Pikosatelliten durch Studenten zu Ausbildungszwecken: Schlussbericht: Bericht-Nr.: ILR-RSN P 13-05: 01.06.2008-30.06.2013. Technische Informationsbibliothek. (2013). https://doi.org/10.2314/GBV:877546894
Heidt, M., Puig-suari, P., Augustus, P., Moore, S., Nakasuka, P., Robert, P., Twiggs, J.: CubeSat: a new generation of picosatellite for education and industry low-cost space experimentation (2000).
Stephen, J.A.: NASA Ames Research Center Moffett Field, CA, United States. Small-satellite mission failure rates. NASA/TM-2018-220034 (2019)
Fasoulas, S., Schmiel, T., Baumann, R., Hoerenz, M., Hammer, F., Bockstahler, K., Witt, J.: New miniaturized and space qualified gas sensors for fast response in situ measurements. https://doi.org/10.2514/6.2010-6147 (2010)
Schmiel, T.: Entwicklung, Weltraumqualifikation und erste Ergebnisse eines Sensorinstruments zur Messung von atomarem Sauerstoff im niedrigen Erdorbit. Sierke (2009).
Schmiel, T., Fasoulas, S.: Gassensoren für die Messung von Sauerstoff-Fluß, Kontamination der Raumstation und die Verifikation von Gas-Oberflächenwechselwirkungsmodellen: FIPEX; Schlussbericht; Laufzeit: 01.11.2002 bis 31.05.2009, FKZ: 50JR0231, FPX-RP-1500-112-ILR. Technische Informationsbibliothek. 2009. https://www.tib.eu/de/suchen/id/TIBKAT%3A616981732
Zajac, K., Riemer, A., Schmiel, T., Henschel, T., Hilgers, A.: Development of an external secondary payload unit for time resolved atomic oxygen measurement. In: DLRK2015, Proceedings (2015).
Smith, J.F.D.N.A., De Keyser, A.G.J., Kataria, V.L.D., Lübken, J.M.J., Reinhard, A.R.J.R., Schmiel, G.T.: QB50 SSWG sensor selection working groups final report EU-FP7 ID: 284427 (2012).
Masutti, D., Denis, A., Wicks, R., Thoemel, J., Kataria, D., Smith, A., Muylaert, J.: The QB50 mission for the investigation of the mid-lower thermosphere: preliminary results and lessons learned. In: Proc. 15th Int. Planetary Probe Workshop (2018)
Lukowicz, M., Abbe, E., Schmiel, T., Tajmar, M.: Thermoelectric generators on satellites—an approach for waste heat recovery in space. Energies 9, 541 (2016). https://doi.org/10.3390/en9070541
Abbe, E., Renger, T., Sznajder, M., Klemmed, B., Sachse, E., Hübner, R., Schüler, T., Bärtling, Y., Muchow, B., Tajmar, M., Schmiel, T.: A material experiment for small satellites to characterise the behaviour of carbon nanotubes in space—development and ground validation. Adv. Space Res. 63, 2312–2321 (2019). https://doi.org/10.1016/j.asr.2018.12.020
Abbe, E., Schueler, T., Klosz, S., Starruß, E., Pilz, W., Böttger, R., Kluge, O., Schmiel, T., Tajmar, M.: Electrical behaviour of carbon nanotubes under low-energy proton irradiation. J. Nucl. Mater.Nucl Mater 495, 299 (2017). https://doi.org/10.1016/j.jnucmat.2017.08.032
Fish, C.S., Swenson, C.M., Crowley, G., Barjatya, A., Neilsen, T., Gunther, J., Azeem, I., Pilinski, M., Wilder, R., Allen, D., et al.: Design, development, implementation, and on-orbit performance of the dynamic ionosphere CubeSat experiment mission. Space Sci. Rev. 181, 61–120 (2014). https://doi.org/10.1007/s11214-014-0034-x
Li, H., Long, X., Feng, H., Wu, Q., Huang, J., Jiang, W., Minuti, M., Yang, D., Citraro, S., Nasimi, H., et al.: In-orbit operation and performance of the CubeSat Soft X-ray polarimeter PolarLight. Adv. Space Res. 67, 708–714 (2021). https://doi.org/10.1016/j.asr.2020.09.001
Mughal, M.R., Praks, J., Vainio, R., Janhunen, P., Envall, J., Näsilä, A., Oleynik, P., Niemelä, P., Nyman, S., Slavinskis, A., Gieseler, J., Jovanovic, N., Riwanto, B., Toivanen, P., Leppinen, H., Tikka, T., Punkkinen, A., Punkkinen, R., Hedman, H.-P., Lill, J.-O., Slotte, J.M.K.: Aalto-1, multi-payload CubeSat: in-orbit results and lessons learned. Acta Astronaut. 187, 557–568 (2021). https://doi.org/10.1016/j.actaastro.2020.11.044
Final Report to the European Union QB50—an international network of 50 CubeSats for multi-point, in-situ measurements in the lower thermosphere and re-entry research. In: EU-FP7, CORDIS Information System of European Commission. ID 284427 (2018)
Lukowicz, M., Schmiel, T.: TEG-TUD: thermoelektrische Generatoren: Systemuntersuchungen, Tests und Konzipierung eines Technologiedemonstrators als Ënergy Harvesterf̈ür Pico- und Nanosatelliten: Schlussbericht : 01.10.2011-30.04.2016. Technische Informationsbibliothek, Dresden. https://doi.org/10.2314/GBV:875680275 (2016)
Eureca Messtechnik GmbH, thermo electrical generator, TEG1-9.1-9.9-0.2/100. https://www.eureca.de/files/pdf/cooling/teg/TEG1-30-30-2.1_100.pdf. (2015).
Lukowicz, M., Schmiel, T., Rosenfeld, M., Heisig, J., Tajmar, M.: Characterisation of TEGs under extreme environments and integration efforts onto satellites. J. Electron. Mater. (2015). https://doi.org/10.1007/s11664-014-3206-2
Funding
Open Access funding enabled and organized by Projekt DEAL. This publication is based on scientific projects that were funded by the German Federal Ministry for Economic Affairs and Energy based on a resolution of the German Bundestag: SOMP2 under the funding code 50RU1202, SOMP2 under the funding code 50RU1201, TEG within the funding code 50RM1114 and CiREX within the funding code 50YB1409. This publication reflects the views only of the authors, and the funding agencies cannot be held responsible for any use that might be made of the information contained therein.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The Authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Langer, G., Bärtling, Y. & Schmiel, T. SOMP2B scientific nanosatellite of TU Dresden: operation and first results. CEAS Space J (2023). https://doi.org/10.1007/s12567-023-00530-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12567-023-00530-y