
Abstract
In this work, an advanced atmospheric model (IATM) for the flight of SHEFEX II is created and its effect on the aerodynamic loads of the first-stage fins of SHEFEX II is investigated. The atmospheric model bases on weather balloon data collected at the starting day of the flight experiment. The wind data are filtered using empirical mode decomposition (EMD) and reduced by their intrinsic mode functions (IMF) to get wind data without balloon oscillation. Compared to a linear interpolated atmosphere (LATM), the numerical results show no significant influence on the forced motion body loads but there is a high impact of wind on the fins of SHEFEX II as unsteady simulations show an increase up to over 50% of dynamic loading, while viscous effects can be neglected.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Possible savings in thermal protection system costs directly influenced the main idea of the Sharp Edge Flight Experiment (SHEFEX). As a result, a sharp edged geometry was developed as shown in Eggers et al. [1]. The post flight analysis of SHEFEX I, launched in 2007, indicated significant plastic fin deformations during the experimental ascend phase. Those antisymmetric deformations resulted in an added roll rate, influencing the flight significantly, as shown by Calvo and Eggers [2]. Originally, the experimental stage was designed to make the reentry without a rolling motion, but was not able to, because of the deformed fins. This led to an off-nominal flight during reentry, as displayed in the reference. The post flight analysis of SHEFEX II made by Franze [3, 4] showed a similar behavior, although the fins got bigger and reinforced compared to SHEFEX I. The fins deformed about \(\Delta \delta _f=0.15^\circ\), which will result in different free flight simulation data, as the structural fin bending and torsion damps the oscillation of the precession motion. These deviations can be used to evaluate the capabilities of the virtual flight testing using a numerical high-fidelity coupled process chain.
Depending on the flight velocity of the vehicle, the cross wind profile along the path can enforce the aerodynamic loads by raising the total angle of attack. In combination with the roll stabilization, the force amplitudes normal to the roll axis on the fins raise during the oscillating changes between luv and lee side. To get more into detail of the aerodynamic loads on the structure during the ascent phase, this work will extract wind data from the measured weather balloon data and, afterwards, filter it via EMD to reduce the amount of measurement errors due to balloon oscillation. The produced atmosphere is used in dynamic forced motion uRANS simulations, and the viscous effects on lateral fin forces along a trajectory segment gets evaluated, which is the main focus of this paper. Using the filtered wind model, the influence on fin loading will be specified for upcoming coupled fluid structure simulations.
Chapter 2 presents the SHEFEX II vehicle and the measurement setup for the weather balloons. Section 3 briefly explains the used numeric codes and methods, including a mesh convergence study. Chapter 4 displays analytic and numerical results. Finally, a summary of the collected results and an outlook for future proceeding is given in Sect. 5.
2 Description of the vehicle, flight data, and weather balloon setup
2.1 Experimental vehicle and Flight Data
SHEFEX II was successfully launched at 19:18 UTC on 22nd June 2012 from the Andøya Rocket Range (ARR) near Andenes in Norway. The apogee was reached at an altitude of 178km after 5 min and it landed 8 min later into the north polar sea, where it was not recovered due to high waves at the landing side.
The two staged rocket, shown in Fig. 1, consists of a Brazilian S40 motor as first and a S44 motor as second stage, connected by an interstage adapter. The nominal set fin angle \(\delta _{nom}\) is defined around a fin hinge line perpendicular to the roll axis, equals to zero if the fin is parallel and set to \(\delta _{nom}~=~0.6^\circ\) for roll stabilization during the ascend phase. The rotational hinge line is in the middle of the fin shoe, which connects the fin frame to the tailcan. The final roll rate was about \(r~=~{1.6}\,\hbox {Hz}\) at \(t={60}\,\hbox {s}\). SHEFEX II was 12.7m long and had a starting weight of 7058 kg. In preliminary flight performance studies the targeted Mach number during the experimental phase is between \(9.5~<~Ma~<~11\) at an altitude of \(100\,\text {km}~>~h~>~20\,\text {km}\) [5]. The post-processed trajectory, including important phases during flight, e.g., motor separations, is shown in Fig. 2.

Schematic representation of the SHEFEX II vehicle

Altitude and velocity development of post processed trajectory from HNS data [3]
Figure 3a displays the measured trajectory on the WGS84 ellipsoid with altitude h, longitude \(\lambda\), and latitude \(\phi\), and Fig. 3b, the corresponding flight path with velocity u flight path angle \(\gamma\) and flight path azimuth \(\chi\) for the first 55s of the SHEFEX II experiment. The shown values are transformed from captured raw data provided by the Hybrid Navigation System (HNS), presented in Steffes [6]. Typically for a sounding rocket, the initial flight path angle is high, which leads to fast gains in altitude. Please note, that at \(t={0}\,\hbox {s}\) the first-stage ignites, producing an acceleration greater than zero in x-direction at \(t={1.3}\,\hbox {s}\), which results in the displayed time offset at the beginning of the flight path curves. SHEFEX II reaches \(Ma=1\) at \(t={13.0}\,\hbox {s}\).

Post processed flight trajectory values over time for the analyzed time frame from 0 to 55 s
2.2 Weather Balloon Setup
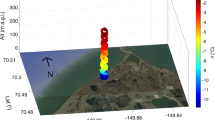
On the flight day of SHEFEX II, seven weather balloons were launched from four different stations. From each of the islands Andøya, Bjørnøya, and Jan Mayen, two balloons were launched and a seventh balloon from the island of Spitsbergen. All weather balloons starting points were located besides the flight path of SHEFEX II. This way, a sufficient coverage of the atmospheric parameters was guaranteed. Figure 4 shows the chosen starting points. SHEFEX II flew along the yellow trajectory in direction north–north–west and passed the stations Bjørnøya and Jan Mayen during its reentry phase. The flown ground distance was around 800km [7]. In this work, the examined flight phase ranges from 0 s to 55 s, in which SHEFEX II covered a ground range of 20 km at an altitude of 38 km.

Location of the weather balloon stations along the trajectory
Table 1 shows the introduced naming of each balloon, their maximum altitude of useful data, as well as the used sampling rate. They recorded information about outer pressure and temperature, relative humidity, and horizontal wind components. Their starting times differ slightly. The Spitsbergen balloon was launched about noon and all other balloons in the afternoon of the flight day. As they fly until burst, the maximum altitudes vary between 14 and 39 km.
3 Numerical methods
3.1 Unsteady calculation of trajectory using DLR TAU code
This paper follows a two-step approach in evaluating the influence of the different atmospheric models. Due to the fact that SHEFEX II spends only the first 13 s in subsonic and most of its first stage launch phase in a supersonic flow regime, one can conclude that the viscous components of the aerodynamic forces might be negligible compared to the pressure induced components for most of the time. During the evaluated time range, the thrust developed by the burning first-stage motor dominates the body forces and therefore the trajectory development. Furthermore, this reduces the potential relative impact of viscous effects on the total force balance. Hence, in a first step, only inviscous Euler equations are solved to compensate for the high amount of analyzed flight points. In a second step, viscous Navier–Stokes simulations by means of RANS, are performed for the first 25 s to verify the obtained data and eradicate remaining questions from the inviscous calculations, quantifying the viscous effect on the side loading for the fins in chapter 4.4. However, all simulations feature the same general approach.
The unsteady Euler/Navier–Stokes equations including rigid body motion are solved using the DLR TAU code, which is validated for subsonic, transonic and hypersonic flows [8, 9]. The highly parallelized code uses domain decompositioning via Message Passing Interface (MPI).
When solving the inviscous Euler equations, at first, a second-order central scheme with backward Euler relaxation is used for the subsonic sections of the trajectory, but showed a very poor convergence behavior for Ma > 0.5, which is referable to the big wake region of the vehicle where high shear layer fluctuations dominate the flow field. For this reason, a second order AUSMDV [10] upwind scheme with backward Euler relaxation solver is used for the whole trajectory, meaning for both subsonic and supersonic regions the upwind scheme is applied. However, the resulting forces differ just slightly between the central and upwind scheme at Ma < 0.5 where both schemes perform well. For the sake of clarity, only the upwind scheme results are shown as inviscous results. The viscous uRANS (unsteady RANS) calculations were performed using the same upwind AUSMDV scheme.
Computing 500 iterations per unsteady dual time step of \(\Delta\)t\(~=~{0.02}{\,\hbox {s}}\) until 55 s flight time, the density residual reaches sufficiently low values to get a solution with converged aerodynamic coefficients. Figure 5 shows the convergence evolution of three time steps in the sub-, trans- and supersonic flow regimes with the same parameter range \(\Delta C\). Beginning with each new time step, the iteration peak converges well to its new value. At \(\text {Ma}\approx\) 0.5, shown in Fig. 5a, the given 500 iterations are necessary to damp the oscillations, whereas at \(\text {Ma}\approx\) 2.0, the calculations converge much faster and smoother. In the transonic region, shown in Fig. 5b at \(\text {Ma}\approx\) 1.0, the aerodynamic coefficients showed a wider oscillating behavior which could not be improved by increasing the number of iterations, but overall the convergence was sufficient.

Convergence evolution of \(C_{fx}\) and \(C_{fy}\) in sub-, trans- and supersonic regimes
For the uRANS simulations the negative implementation of the Spalart-Allmaras model is used [11]. This model is identical with the original Spalart-Allmaras model unless the turbulent working variable is greater than zero, where the two formulations differ. In most cases, the models show similar results, but the negative formulation converges better [12]. Especially in transonic and lower supersonic regimes, it can show better agreements with experimental data [13]. Additionally, the mesh convergence study is performed with Menter SST, showing only small differences between the models in the subsonic regime. Table 2 summarizes the used methods for the generation of the shown numerical CFD results in chapters 3.2 and 4.
As SHEFEX II is a rather simple geometry and due to the sharp flow separating edges, the simpler one equation SA negative turbulence model is chosen over the more sophisticated two equation model Menter SST.
The following computations are produced by setting the flight mechanic data by means of its position, orientation, flight velocity and roll rates, collected by the Hybrid Navigation System (HNS), in an unsteady CFD computation using the DLR TAU code. The body conditions get updated in every time step \(\Delta\)t \(=~{0.02}{\,\hbox {s}}\), to match the flown flight path. This results in forced motion calculations. For this use case, an external motion function was applied, implemented by Heinrich et al. [14]. This function allows to set the inflow condition to Ma \(=\) 0 and move the mesh with a given velocity in a virtual endless computation area. The inflow flux correlates with the given relative velocity which produces the surface loads, similar to the commonly used inflow condition Ma \(\ne\) 0.
An example cut through the symmetry plane is shown in Fig. 6a. On the top, the mach number distribution of the moving coordinate system can be seen. At this unsteady time point, the shock is still moving along the forebody, beginning to touch the split fairing. On the bottom half, the relative velocity between moving and geodesic frame is displayed. The CFD mesh of SHEFEX II has the velocity of the given external motion vector from the post-processed HNS data. Viewed from an external stationary observer, the velocity far away from the vehicle is zero, whereas, wall near velocities match the center of gravity node velocity. For this reason, the base wake region contains high velocities, which relates to zero relative to the body.

Viscous flow topology in xz-symmetry plane and a perpendicular cut in \(x=\) 12 m at \(t=\) 17.2 s
Furthermore, it is visible that the motor jet is not modeled within the calculation, as this would result in more than one gas species simulations, which the DLR TAU code is capable of, but would have much higher computation times, scaling with the number of considered species and reaction equations. The forces along roll axis shown in chapter 4 are with the force on the base plane of the nozzle exit. Subsequent work will include the evaluation of the jet flow in sub- and supersonic regimes according to Hammond [15] to simplify the consideration using the jet thrust as simple force vector in free flight 6 degree of freedom (6DoF) simulations. For these calculations, the base plane forces will be subtracted from the body forces.
Figure 6b shows a cut at \(x=\) 12 m looking against the flight direction of SHEFEX II. Mach contour lines and their corresponding label specify the unsymmetrical fin loading due to the roll stabilization. In combination with the surface pressure shown in Fig. 6a, several shock interactions can be recognized. First, there is a shock from each nose along the side panels, shortly followed by a second, starting at a widening in diameter from the motor adapter at the tailcan after one third of the fin length. A third shock starts at the front nose on the outer span wise of each fin along the side panels. These three shocks interact between each quadrant of the tail region, forming the shown Mach number distribution. The surface pressure at the fore body illustrates the step-wise fall at each segment edge and the high pressurized region in the front face of the split fairing. All these identified regions of interest needs to be taken into account for the farfield meshing, presented in the following chapter 3.2.
3.2 Mesh convergence study
The mesh Grid Convergence Index (GCI) of the used inviscous mesh is presented by Roache [16]. The force and moment coefficients along all three axis gets averaged and combined into a single GCI. Table 3 lists the generated meshes including their number of points, cells, prismatic layers, and refinement ratios between the stages.
Overall, 13 points have been calculated to get an overview along the trajectory. Because the computational effort scales with the calculated number of points, the normal inviscous mesh showed a good trade-off between accuracy and cost with an GCI < 4% using 5.1M points in the subsonic phase and well under 1% in the supersonic region, shown in Fig. 7.

Grid Convergence Index of body force coefficients for inviscous and boundary layer variation of viscous simulations for the coarse (C), normal (N), and fine (F) meshes
As an example the meshes called coarse and normal for the inviscous calculations are shown in Fig. 8. The refinement factor of 1.5 is applied in every dimension for the number of cells. This leads to a total factor of 3.375, which is recommended by Roache [16].

Coarse and normal mesh used for inviscous convergence study
For the unsteady viscous calculations, a mesh with a decent boundary layer approximated by prismatic cells had to be generated, which is rather difficult for the given trajectory case. As the velocity rises over flight time, the boundary layer gets smaller. This leads to unnecessary fine cells on the outside of the boundary layer, as the maximum height had to match the critical low speed case. On the other end of the trajectory, at high supersonic speed, the boundary layer defines the smallest first cell height to get an y\(^+\) < 1 over the whole trajectory, which makes the mesh unnecessarily fine resolved at low the subsonic regime.
A good compromise was found with a smallest layer height of 10−6 m and 27 layers with a constant growing factor of around 1.4, leading to a maximum thickness of 0.0216 m. This mesh produces an GCI < 3.2% as shown in Fig. 7 for a constant refinement factor R \(=\) 1.3 at a critical low subsonic Ma \(=\) 0.4. On this basis the fine mesh with 27 boundary layer prismatic cells is used for the viscous calculations.
The surface mesh of the viscous uRANS simulations was obtained from the best performing non-viscous normal mesh. The selected meshes for the following computations in chapter 4 are labeled with a star (*) in Table 3.
Furthermore, for the two considered turbulence models, Menter SST and SA negative, Fig. 7 shows differences in the same range of under 4% in subsonic and well under 1% for most of the supersonic phase. As the computational effort of the one equation model SA negative is smaller compared to the two equation model Menter SST, the former was chosen for the simulations in chapter 4.
3.3 Empirical mode decomposition of wind profiles
Weather balloons and their attached radiosondes are exposed to multiple unsteady phenomena which might cause the balloon as well as the data acquiring radiosonde to show arbitrary self-induced motions, e. g., sudden changes in the wind vector [17] or a fluctuating wake of the balloon due to a turbulent boundary layer [18] depending on the Reynolds number with similar oscillating effects as the von Kármán vortex street. These motions can be noticed in the recorded wind data and need to be filtered before using the wind profiles in the further process. This paper uses the Empirical Mode Decomposition (EMD) as presented by Sako [18]. Figure 9 shows the power spectral densities for the wind profiles of all seven weather balloons. It is easy to see that AND1 and AND2 have, for self-induced balloon motions, a characteristic large peak at 0.1 Hz. Hence, the wind profiles of Bjørnøya and Jan Mayen were probably pre-filtered by other methods or in the case of the Spitsbergen balloon the sampling rate of 0.2 Hz is too large to capture those frequencies.

Power spectral densities of the wind profiles of the seven weather balloons
Nevertheless, the wind profiles of Bjørnøya, Jan Mayen, and Spitsbergen still show rather frequent fluctuations which are not expected to have any influence on the results due to the large speed of SHEFEX II compared to the wind speeds. Thus, all wind profiles are filtered, to obtain a smooth trend for the wind profiles. The actual filtering is done visually by calculating Intrinsic Mode Function (IMF) decompositions for different abort criteria in the region of \({10^{-6}} \le \epsilon _{\text {STOP}} \le {10^{-3}}\) and finding a suitable combination of subtracted IMF which represent the trend of the wind profiles best. As can be seen in Fig. 10, subtracting the IMF from the raw signal reduces the fluctuation and smooths the curve, by reducing the balloon induced oscillation as well as small gusts, leaving the main wind profile. The abort criteria of the IMF sifting process for the balloons with the highest altitudes are shown in Table 4.

Filtered wind profile of AND1 using different number of subtracted IMF
3.4 Interpolation using radial basis functions
The processed weather balloon data are combined into an atmospheric model using Radial Basis Function (RBF) interpolation of the atmospheric parameters as well as the SHEFEX II GPS position and altitude data. The interpolation process bases on the implementation of the RBF interpolation method in the well-known Python module "SciPy" with its function "scipy.interpolate.Rbf()". Each atmospheric parameter is interpolated at specific altitude layers and afterwards evaluated at the current position of SHEFEX II in this altitude to get a three-dimensional weather model for the first-stage launch phase of SHEFEX II.
To identify a suitable RBF, a parameter study with all RBF available in "scipy.interpolate.RbF()" is carried out based on the outer pressure near the ground. The idea behind choosing this setup is that it is much simpler to identify unrealistic pressure values than temperature or wind values.
During the parameter study, the interpolation process proved to be very sensitive concerning the form parameter \(\epsilon\) of the infinitely smooth RBF when all balloons from Andøya, Bjørnøya, and Jan Mayen are utilized as sampling points for the interpolation. Therefore, only one balloon per station (AND1, BJO2 and JAN2) is used, as this combination shows a much less sensitive behavior. The multiquadric RBF proves to be suitable with a form parameter of \(\epsilon _{RBF} = {10^{-8}}\), shown in Fig. 11b. Smaller values result in spiked distributions, illustrated in Fig. 11c, where higher values lead to rounded regions with high gradients, which are not realistic, shown in Fig. 11a.

Isobaric plane cuts in \(h =\)2 km for different form parameters \(\epsilon _{RBF}\) of multiquadric RBF interpolation
This reduced supporting point approach has, however, disadvantages at an altitude of \(\text {h}>{27.2}\,\hbox {km}\) where no data of the AND1 balloon are available anymore. The still large distance between the position of SHEFEX II at this altitude and the Spitsbergen balloon acts as a kind of "lever" so that the wind velocities of the Spitsbergen balloon are nearly projected one-on-one with inverted sign into the atmospheric model. Since the wind velocities at Spitsbergen are large, compared to BJO2 and JAN2, neglecting the Spitsbergen balloon completely seems to be a more conservative approach for the atmosphere above \(\text {h}>{27.2}\,\hbox {km}\). The resulting discontinuity at \(\text {h}>{27.2}\,\hbox {km}\) which arises due to the fact that AND1 is no longer available as sampling point, is smoothed by applying a linear weighting function in the region of \({24.5}\,\hbox {km} \le \text {h}\le {27.2}\,\hbox {km}\).
4 Results of analysis
4.1 New atmospheric and wind model
Figure 12a illustrates the new atmospheric model (IATM-interpolated atmosphere model) by means of outer temperature and pressure. For the sake of comprehension the atmospheric model presented in an earlier work [3] (LATM-linear averaged atmosphere model) is depicted as well. In the following, IATM denotes the interpolated atmospheric model without wind model and IATMW the interpolated model including wind. One can clearly see that the outer pressure curves show hardly any differences (\(\Delta p_{\text {max}} = {6.27}\,\hbox {hPa}\) at \(h={469}\,\hbox {m}\)) between IATM and LATM, whereas, the curves of outer temperature differ to a larger extend. The maximum difference occurs right at the beginning of the flight with \(\Delta T_{\text {max}} = {3.95}\,\hbox {K}\). As both differences are small compared to the absolute values of the atmospheric parameters, no big differences in the fin loadings are expected between the two cases LATM and IATM. It is noted that calculating the tropopause in accordance with the definition of the U.S. Department of Commerce/National Oceanic and Atmospheric Administration [19], a difference of about 600 m between the two atmospheric models with \(\text {h}_{\text {tropo, LATM}}~=~{9959}\,\hbox {m}\) and \(\text {h}_{\text {tropo, IATM}}~=~{9376}\,\hbox {m}\) can be seen.

Used atmospheric and wind models
Figure 12b shows the created wind model for the flight of SHEFEX II with its wind components \(u_w\) (from north to south direction) and \(v_w\) (from east to west direction) and their resulting total value, presenting values fluctuating between 0 m/s to 9 m/s, depending on the altitude.
4.2 Angle of attack oscillations
Figure 13 plots the total angle of attack calculated from the HNS data over the first 55 s of the flight trajectory against the total angle of attack if the wind profile shown in Fig. 12b is added.
The first 10 s show the transient effect from the initial pitching from the starting ramp. Afterwards, the total angle of attack does not exceed \(\alpha ={{1.5}^\circ }\) from 10 s to 55 s. The wind profile adds a significant amount to the resulting total angle of attack, oscillating between \({-1}^\circ\) < \(\Delta (\alpha _w-\alpha )\) < \({1}^\circ\) by itself, leading to twice the amount of the value at the beginning. This indicates a huge effect of the wind for the aerodynamic loading on the vehicle and especially its fins, which is mainly depending on the velocity and the total angle of attack. As the time proceeds, the velocity of the sounding rocket rises, which reduces the impact of the wind, as it does not exceed 9 m/s.

Angle of attack vs. flight time and corresponding wind influence
4.3 Maximum loads during the first 55 s
4.3.1 Axial force and roll moment
The total axial force along x, as can be seen in Fig. 14, has an asymptotic trend at both ends of the computed time range. Due to the small angle of attack shown in Fig. 13, it is near the drag force. At first the velocity is small and the outer density is high, which leads to the increasing force and roll moment. Between 10 s < t < 15 s, small oscillations indicate the transonic phase of the ascend. Afterwards, dynamic pressure rises and the maxima for roll axis force as well as roll moment peaks at around 20 s and 25 s, respectively. Due to the decreasing density and, therefore, dynamic pressure, the curves fall to approximately zero. Additionally, in the end, the roll rate reaches its maximum resulting in a decreasing roll moment over time, as the effective angle of attack of the fixed fins decreases. Furthermore, the atmosphere model has only minor influences on the results. Although the differences are small between the two atmospheres, the LATM will be used as a baseline comparison for IATM with and without wind in the following chapter.

Axial force and roll moment at different atmosphere models for inviscous and viscous calculations
If viscous effects are included, they show a small influence on \(F_x\). From the beginning, the results follow the inviscous curves, separating slightly at Ma \(>1\), not exceeding a difference of 1%. The maximum roll moment reduces by 3.7% at 24.4 s. After the peak at 25 s, the differences are decreasing. For this reason, the RANS simulations are just computed until 32 s at Ma \(<3\). Overall, it is not expected that RANS simulations do have a significant impact on the fin loading in the following chapter.
4.3.2 Fin forces
Figure 15 shows the oscillation of the perpendicular forces of fin 9 exemplarily for all four fins. The fins are named according to the clock face in clockwise direction when looking from the back of SHEFEX II, as displayed in Fig. 6b, meaning fin 9 is oriented at the portside. The oscillations start at zero and their frequency increases as the roll rate increases over flight time. Due to the roll stabilized precession, shown in Fig. 13, each fin rotates upwind and downwind, resulting in the shown oscillations. As the dynamic pressure has its maximum between 10 s < t < 15 s, the biggest absolute force differences are in this time range. The final roll rate is developing over time and the dynamic pressure reduces the oscillating fin loading approximately to zero. To compare different atmospheric influences, in the following the force magnitude is calculated and presented with \( {F}_{yz}\).

Perpendicular aerodynamic forces on fin 9
Figure 16a and b shows the calculated magnitude of cross force on fin 6 and fin 9 of the first stage of SHEFEX II for all three atmospheric models. As already stated above, LATM and IATM show hardly any differences in the forces. Introducing the wind model with IATMW has, as predicted, a large influence on the calculated cross forces. The results for the opposite fin 0 and fin 3 match these statements.

Fin loading over flight time of two perpendicular oriented fins
The force component perpendicular to the fin changes its intensity on a regular basis. This is due to the induced roll motion of SHEFEX II. One can clearly notice that the maximum force fluctuations increase dramatically when wind is added to the simulations. On fin 6 for LATM and IATM, the maximum fluctuation is \(F_{yz,F{6},max} ={9.6}{\,\hbox {KN}}\) at 21.17 s compared to \(F_{yz,F{6},max} ={11.5}{\,\hbox {KN}}\) (\(+{20}\%\)) for IATMW. Both values are at the same time point in the supersonic phase.
At fin 9 on the other hand, the maximum oscillations are \(F_{yz,F{9},max} ={9.2}{\,\hbox {KN}}\) at 25.36 s for LATM and IATM compared to \(F_{yz,F{9},max} ={9.6}{\,\hbox {KN}}\) at 12.55 s (\(+{4}\%\) at different flight time). This means that the maximum force difference occurs within the transonic region for IATMW and in the supersonic region for the other two models. The transonic phase spans roughly from 11.5 s to 19.5 s flight time with Mach numbers between \({0.9}\le \text {Ma}\le {1.5}\). One can further observe that the force magnitudes in the transonic region almost double for IATMW regarding the overall trend and adding 54% for fin 6 and 43% for fin 9 to the peak loads. Nevertheless, as the force increases in both directions almost equally no major differences in the acting roll moment can be observed throughout the launch phase between all three atmospheric models.
The dissimilar changes in maximum force and time shift of the peaks between the fins can be related to the highly unsteady and non-linear curves of the angle of attack and wind profile shown in Figs. 12b and 13. Depending on the roll angle they add or subtract loads on the fins. Another reason might be the forced motion approach of the HNS data onto the simulation. Although they got reduced in post-processing, small residual positional errors in the measured data cannot be eliminated completely.
Overall, Fig. 16 shows that the largest relative increases of the maximum force components are seen in the transonic region \(t<\) 22 s, leading to a time shift of the critical point regarding fin loading, as the maximum dynamic pressure occurs at higher mach numbers as well as flight times.
After 37 s, the differences between the results of all atmospheric models are negligible and as SHEFEX II is still well below the maximum altitude of AND1, the utilized conservative approach of neglecting the Spitsbergen balloon completely shows no negative influence on the results.
4.4 Maximum loads during the first 25 s using uRANS
As discussed in the former section, the biggest influence of the wind model is in the sub- and transonic region of SHEFEX II up until 22 s, where viscous effects can have a significant influence potentially. For this reason, viscous uRANS (unsteady RANS) calculations using an upwind scheme are performed on the basis of the LATM and IATMW model, i. e., without and with the influence of wind.
Figure 17 shows that overall viscous effects are hard to see and negligible compared to the wind effects shown before. Reasons can be found in the rather simple geometry of SHEFEX II with clear sharp edges, where it is easy for the turbulence model to predict flow separation. These specific pressure gradients are calculated by the inviscous Euler simulations as well. Only minor differences are noticeable in the peak loading. For the supersonic regime, starting at \(t>\) 11 s, maximal differences reach \({9.6}\%\) at 11.25 s for fin 6 and -\({6.6}\%\) at 18.98 s for fin 9, but for the most parts of the trajectory, the results match well between the two different calculations. Under \(t<\) 11 s, the relative differences at the peaks are bigger, but because the absolute values are smaller, they tend to have a smaller impact on the trajectory. For the examined time range, predominantly viscous cross loads are smaller compared to the inviscous, reducing the displayed roll moment in Fig. 14. This makes the inviscous results conservative for preliminary design.

Fin loading over flight time of two perpendicular oriented fins, inviscous vs. viscous calculations without wind
The same can be said overall about the computations including the wind model shown in Fig. 18. The relative differences can reach \(-\)9.0% for fin 6 and 7.2% for fin 9, but the main part of the curves agree well to one another. While the main statement of the conservative approach for the inviscous calculations is valid for fin 6, it is not for fin 9. It shows slightly higher cross loads with wind model and viscous influences, although the differences are smaller compared to fin 6.

Fin loading over flight time of two perpendicular oriented fins, inviscous vs. viscous calculations with wind
For further investigations, especially of the cross forces of the SHEFEX II trajectory, it is suitable to calculate inviscous Euler simulations, which reduces computational cost and stability.
5 Conclusions and outlook
First, this work post processes the collected atmospheric and wind data of seven weather balloons from the start of SHEFEX II and filters it by means of their intrinsic mode functions using an empirical mode decomposition to extract the wind profiles of the starting conditions and reduce measurement errors due to wind balloon oscillations. Afterwards, the profiles are interpolated to the flight path using radial basis functions.
Second, the generated atmosphere model and wind profile is compared to a simpler linear averaging method from an earlier work. The differences are small comparing the different atmospheric parameters temperature, density, and pressure, but significant if the wind is considered in the simulations. At certain points, the wind adds up to 54% of dynamic loading on the fins of SHEFEX II, potentially leading to different free flight values. More importantly for preliminary design, the time point of the maximum force of the fins, changes from supersonic to transonic phase. This moves the critical point far away from the maximum dynamic pressure.
As most differences are seen in the sub- and transonic regions, viscous uRANS simulation are performed additionally to eliminate the uncertainty of surface friction in the results with and without wind model. But simulations show that the viscous effect can be neglected mainly due to the simple geometry and high amount of thrust.
Next, a fully coupled fluid structure flight mechanic simulation (CFD-CSM-CFM) along the trajectory is implemented to evaluate the influence of the fin loading and their resulting fin deformation on the flight trajectory of SHEFEX II.
Data availability
The data was distributed within the DLRs project partners of SHEFEX and is not available as open access.
Abbreviations
- AND:
-
Andøya
- ARR:
-
Andøya Rocket Range
- ATM:
-
Atmospheric model
- BJO:
-
Bjørnøya
- C :
-
Dimensionless coefficient
- EMD:
-
Empirical mode decomposition
- F :
-
Force
- GCI:
-
Grid convergence index
- h :
-
Altitude
- HNS:
-
Hybrid Navigation System
- IMF:
-
Intrinsic mode function
- JAN:
-
Jan Mayen
- M :
-
Moment
- Ma:
-
Mach number
- n :
-
Number of iterations
- p :
-
Pressure
- PSD :
-
Power spectral density
- r :
-
Roll rate
- R :
-
Refinement factor
- RBF:
-
Radial basis function
- SPI:
-
Spitsbergen
- t :
-
Time
- T :
-
Temperature
- \({\textbf {u}}\) :
-
Velocity
- \(u_w\) :
-
Wind component north to south
- \(v_w\) :
-
Wind component east to west
- \(\alpha\) :
-
Angle of attack
- \(\delta\) :
-
Fin deflection angle
- \(\Delta\) :
-
Absolute difference
- \(\epsilon\) :
-
Relative error
- \(\epsilon _{RBF}\) :
-
Form parameter of RBF
- \(\lambda\) :
-
Geographic latitude
- \(\phi\) :
-
Geographic longitude
- C:
-
Coarse
- f:
-
Fin
- F:
-
Fine
- N:
-
Normal
- STOP:
-
Abort criteria
- w:
-
Wind
- x:
-
X-axis (tail to nose)
- y:
-
Y-axis (starboard)
- z:
-
Z-axis (downwards)
References
Eggers, T., Stamminger, A., Hörschgen, M., Jung, W., Turner, J.: The Hypersonic Experiment SHEFEX - Aerothermodynamic Layout, Vehicle Development and First Flight Results. In: Proceedings of 6th International Symposium on Launcher Technologies ’Flight Environment Control for Future and Operational Launchers’, Munich, Germany (2005)
Calvo, J.B., Eggers, T.: Application of a Coupling of Aerodynamics and Flight Dynamics to the SHEFEX I Flight Experiment, AIAA 2011-2323. In: 17th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, San Francisco, California, USA (2011)
Franze, M.: SHEFEX II: a first aerodynamic and atmospheric post-flight analysis, AIAA 2016-0786. In: AIAA Atmospheric Flight Mechanics Conference, San Diego, California, USA (2016)
Franze, M.: SHEFEX II: an aerodynamic and structural post-flight analysis, AIAA 2016-3237. In: AIAA Atmospheric Flight Mechanics Conference, Washington D.C., USA (2016)
Weihs, H., Longo, J.M.A., Turner, J.: The sharp edge flight experiment SHEFEX II, a mission overview and status, AIAA 2008-2542. In: 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Dayton, Ohio, USA (2008)
Steffes, S.: Real-time navigation algorithm for the SHEFEX2 hybrid navigation system experiment, AIAA 2012-4990. In: AIAA Guidance, Navigation and Control Conference, Minneapolis, Minnesota, USA (2012)
Weihs, H.: Sounding rockets for entry research : SHEFEX flight test program, SP-721. In: Proceedings of the 21st ESA Symposium on Rocket and Balloon Programmes, Thun, Switzerland (2013)
Schwamborn, D., Gerhold, T., Heinrich, R.: The DLR TAU-Code: recent applications in research and industry. In: European Conference on Computational Fluid Dynamics, ECCOMAS CFD (2006)
Mack, A., Hannemann, V.: Validation of the unstructured DLR-TAU-code for hypersonic flows. In: 32nd AIAA Fluid Dynamics Conference and Exhibit, AIAA Paper 2002-3111, St. Lousi, Missouri (2002)
Wada, Y., Liou, M.-S.: A flux splitting scheme with high-resolution and robustness for discontinuities, AIAA 94-0083. In: 32nd Aerospace Sciences Meeting and Exhibit, Reno, Nevada, USA (1994)
Spalart, P.R., Allmaras, S.R.: A One-equatlon turbulence model for aerodynamic flows. In: 30th Aerospace Sciences Meeting and Exhibit, Reno, Nevada, USA (1992)
Allmaras, S.R., Johnson, F.T., Spalart, P.R.: Modifications and clarifications for the implementation of the Spalart-Allmaras turbulence model. In: 7th International Conference on Computational Fluid Dynamics, Big Island, Hawaii, USA (2012)
Schütte, A.: Wirbelumströmungen an gepfeilten Flügeln mit runden Vorderkanten. DLR Forschungsbericht 2015-40, Dissertation, Technische Universität Braunschweig, Deutschland (2015)
Heinrich, R., Michler, A.: Unsteady simulation of the encounter of a transport aircraft with a generic gust by CFD flight mechanics coupling. In: Proceedings of the CEAS Conference, Manchester, United Kingdom (2009)
Hammond, W.E.: Design methodologies for space transportation systems. In: AIAA Education Series, American Institute of Aeronautics and Astronautics, Washington D.C., USA (2001)
Roache, P.J.: Quantification of uncertainty in computational fluid dynamics. Annu. Rev. Fluid Mech. 29, 123–160 (1997)
Yajima, N., Izutsu, N., Imamura, T., Abe, T.: Scientific Ballooning: Technology and Applications of Exploration Balloons Floating in the Stratosphere and the Atmospheres of Other Planets. Springer, New York (2009)
Sako, B.H., Walterscheid, R.L.: Empirical mode decomposition filtering of wind profiles, AIAA 2016-0542. In: AIAA Atmospheric Flight Mechanics Conference, San Diego, California, USA (2016)
U.S. Department of Commerce/National Oceanic and Atmospheric Administration: Federal Meteorological Handbook No. 3 Rawinsonde and Pibal Observations (1997)
Funding
Open Access funding enabled and organized by Projekt DEAL. No funds, grants, or other support was received except for basic funding within DLR.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
No conflicts of interest were identified.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Franze, M., Donn, P. Analysis of weather balloon data to evaluate the aerodynamic influence on the launch phase of SHEFEX II. CEAS Space J 15, 881–894 (2023). https://doi.org/10.1007/s12567-023-00513-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-023-00513-z