
Abstract
In the context of the AHRES (Advanced Hybrid Rocket Engine Simulation [1]) program of the German Aerospace Center (DLR), an upper stage for the Brazilian sounding rocket VSB-30 is designed. This third stage is based on the hybrid rocket engine VISERION. The pre-design is mainly focused on the fluid and pressurization system using common European design standards. Real gas simulations were conducted to quantify the required pressurant mass and to analyse operating parameters. Subsequently, all additional subsystems are described and analysed. Initial requirements such as the maximum outer diameter and limits of the overall mass were given due to the launch system. Further requirements for each module and the main components are identified and examined. Available modules for the service or recovery system and commercially off-the-shelf components were considered to reduce the overall complexity and costs. Preliminary flight stability and aerodynamic loads were evaluated using numerical fluid simulations on different characteristic ascent points. The dimensioned system demonstrates the ability of hybrid rocket engines to be used as propulsion modules for upper stages. This enables the combination of several advantages of common propulsion systems as the main intention in hybrid rocket development.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
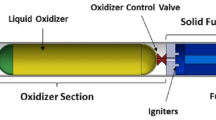
Sounding rockets are typically used to conduct unmanned flight experiments under microgravity conditions. To reach high altitudes and thereby long flight durations, they often use solid rocket motors as cost-efficient and storable propulsion modules. Considering other studies, such as thermal analysis of atmospheric re-entries, different requirements, like a constant flight velocity or altitude, become important. The measurement of atmospheric heat fluxes for example can be used to improve thermal protection systems [2]. Hence, the actual flight path needs to be adjusted to the planned trajectory. Hybrid rocket engines offer the ability to regulate and interrupt the generated thrust simply by throttling the liquid oxidizer mass flow. Thus, the launch system can reach and hold the desired flight conditions, which widely extends the area of application of the sounding rocket.
Due to the general advantages of hybrid propulsion, such as cost-efficiency and safety in storage, transport and handling as well as potential reusability and ecological friendliness, the DLR develops the AHRES software for the complete design of hybrid and solid rocket engines [1]. The included calculations and results are verified using different methods. Numerical simulations [3] are conducted using the DLR TAU-Code on an HPC cluster to analyse the inner flow and combustion processes of different two- and three-dimensional hybrid rocket engines like the AHRES motors [4] that have the same name as the software or the ARIEL chamber [5] with varying propellant compositions. Some of these engines are additionally tested with the DLR test facility for hybrid rocket engines of the Institute of Aerodynamics and Flow Technology at the DLR test site Trauen to obtain the required measurement data.
With the latest ground tests, the upscaled VISERION engine was qualified. It generates a nominal thrust of approximately 11.5 kN with a burn time of 27 s and represents a new thrust class in the context of the AHRES program. It is propelled with 87.5 wt.% of high-test peroxide (HTP) and hydroxyl-terminated polybutadiene (HTPB). Additional overview data are summarized in Table 1. Preliminary test results show good agreement with design data, although a detailed test analysis is currently carried out.
The propulsion system imposes the main requirements in the fluid system, which stores the liquid HTP, and affects other subsystems of the sounding rocket. Therefore, the pre-design is a highly iterative process. To set up an initial application case for this engine, an upper stage capable to meet the requirements described above, shall be designed. As the launch system, the sounding rocket VSB-30 is considered, which was developed in a Brazilian–German cooperation project [6]. It is composed of two solid rocket motor stages which are mounted to the payload segment using an adapter with different outer diameters. For the third stage, based on the VISERION engine, the most suitable outer diameter is 438 mm, while the solid rocket motors are mounted within 557 mm casings. The system is able to reach an altitude of approximately 260 km carrying a payload mass of about 400 kg. In typical missions the flight time above 100 km, which is generally considered as the condition for sufficient microgravity, is around 6 min. In this configuration the system has a mass of 2.6 tons and has a total length of 12.6 m. The propelled ascent phase is stabilized by spin-up motors. The bulk spin rate is compensated by an adjusted yo-yo de-spin before the separation of the second stage. Further information is given in Table 2. The basic structure of a common VSB-30 configuration is shown in Fig. 1.

CAD drawing of the two-staged VSB-30 (557 mm) with its payload (438 mm)
In the following sections, the subsystems of the upper stage are analysed. To avoid complex and expensive developments, some commercially off-the-shelf (COTS) components and suitable flight-proven modules were considered. Main aspects of the pre-design were the fluid and the pressurization system, which are described in detail. In addition, an overall mass and length budget is given and the aerodynamic flight stability and drag are analysed using CFD simulations.
2 Upper stage architecture
The engine module defines the basic architecture of the upper stage that is shown in Fig. 2. It is followed by the fluid system, mainly the oxidizer tank, which is connected to the engines catalyst via a piping system. The pressurization system is attached upstream and maintains a constant pressure level inside the fluid system. Therefore, a pressure vessel and a pressure regulator are needed. The payload and service modules are mounted above the propulsion modules. The upper stage will be recovered by a parachute system inside of the nose cone. Here, the so-called European Recovery System (ERS) is considered, since it is a flight-proven and reliable module developed for the use on the sounding rocket VSB-30 [7].

Module and subsystem arrangement of the upper stage pre-design
2.1 Fluid system
The oxidizer mass flow and total burn time of the VISERION engine lead to the required total oxidizer mass which in addition with the launcher requirements, such as the maximum outer diameter, sets the tank geometry. With the values from Table 1, the total oxidizer tank volume is set to 110 l. This already comprises a certain safety margin and sufficient tank ullage. To avoid gas pushbacks from the engine into the piping system, the tank pressure is set to 150% of the combustion chamber pressure. Considering 5 bar of additional safety margin, the tank pressure is set to 80 bar. To optimize the overall weight, the tank will be manufactured as a composite over-wrap tank with a polymeric liner. This non-integrative architecture requires an additional primary structure which affects the mass balance negatively. However, it is possible to use available wrapping equipment to avoid cost-intensive new developments. The composite materials must be separated from the reactive HTP by a liner to ensure stable and safe oxidizer storage. The minimum composite wall thickness to withstand the pressure stresses can be estimated using Barlow’s formula given in Eq. 1 for tangential pressure loads.
Considering a safety factor of 2, the inner pressure \(p\) and the mean diameter \({D}_{m}\), the wall thickness can be calculated to 5 mm. The maximum allowable tension \({\sigma }_{\mathrm{max}}\) was set to 700 MPa, as this value is a very conservative assumption for laminated composite materials. Considering all of the aspects above, the basic geometry is defined and the oxidizer tank is capable to meet all given requirements.
The manufacturing and qualification processes are specified according to standards of the European Cooperation for Space Standardization (ECSS), which define analyses and tests to demonstrate stability, strength and stiffness [8, 9]. The tank qualification includes pressure cycling tests, leak tests and a final design burst pressure test with additional pre- and post-test non-destructive inspections. The design burst pressure (DBP) is calculated via the maximum design pressure (MDP) and a qualification factor of \({K}_{Q}=1.5\) [8].
The MDP results from the maximum expected operating pressure (MEOP) and further factors of safety that consider uncertainties in mathematical modelling and project growth potential and is set to a total of 90 bar.
The pressurized fluid system is blocked by the main valve, which starts and stops the oxidizer flow and as a consequence the combustion process. It is placed between the catalyst chamber and the oxidizer tank. The most important parameter for the selection of a suitable valve design is the flow coefficient Kv. It’s highly influenced by the fluid density, the pressure difference and the volumetric flow and can be calculated according to the VDI/VDE guideline 2173 [10] by
The volumetric flow \(Q\) results directly from the oxidizer mass flow of the VISERION engine. The flow coefficient varies from 6 m3/h to 13.6 m3/h, depending on the desired pressure drop \(\Delta p\), which is set to 1 bar and 5 bar, respectively. The density \(\rho\) of the HTP with a concentration of 87.5 wt.% is set to 1380 kg/m3. Due to these relatively high flow rates and the significant pressure level inside the oxidizer tank, a commercially available coaxial solenoid valve with industrial standard is chosen as the main valve. Its compact and robust structure ensures a tight sealing despite of the given operational conditions. Therefore, coaxial valves represent a space- and weight-saving solution.
The fluid system also comprises two secondary components apart from the piping and mounting system. This includes a compensator for axial stresses to ensure that the line of thrust leads through the primary outer structure. In case of a launch abort, an emergency drain must be mounted between the tank and the main valve to empty the oxidizer tank safely. Therefore, a quick-lock connection needs to be attached. All described components are shown in Fig. 3. Their respective masses and lengths are summarized in Table 3.

Sectional CAD drawing of the upper stage subsystems and primary components
2.2 Pressurization system
During the combustion process, a pressure regulator maintains a constant pressure level in the oxidizer tank by expanding a Helium pressurant gas. The flow rate must therefore be high enough to compensate the pressure loss due to the consumed oxidizer. The Helium gas is stored at a high-pressure level to achieve a space- and weight-saving design. The pressure regulator is considered as a COTS component to avoid a complete redevelopment. A dome-loaded regulator is chosen to ensure that it will withstand the inlet pressure and offer a sufficient mass flow. It works on the principle of equilibrium between a dome pressure and the outlet pressure. Similar to the main valve, the flow coefficient for a subcritical, gaseous flow can be calculated according to [10] by Eq. 4. The normed values are corresponding to the standard temperature and pressure, namely 273.15 K and 1 bar. The maximum required flow coefficient must be estimated for the engine burnout, since the pressure difference reaches its minimum at this point. The minimum pressure difference is set to 20 bar. This is necessary to guarantee a precise regulation for the complete burn time. With these values, the normed flow coefficient can be calculated to about 0.3 m3/h.
The pressurant gas will be stored in a composite pressure vessel with a polymeric inner liner to ensure gas-tightness, similarly to the oxidizer tank. Since modern composite tanks, e.g. for the storage of compressed natural gas (CNG) or hydrogen, are available for a pressure range of over 700 bar, the pressure limit is set to 600 bar, according to the maximum operating pressure of the pressure regulator. Its composite wall thickness can analogically be approximated to 10 mm using Eq. 1.
The pressure vessels total volume depends on the required pressurant mass. Though, analytical mass quantification is difficult, since the modelling of gas expansion comprises complex thermodynamic processes. Different approaches with various simplifications can be found in the literature, but most of them are based on the ideal gas law combined with a correction factor [11,12,13]. Due to the inaccuracy of these models and the lack of empirical data, the basic design must be considered as preliminary and the actual required pressurant mass is to be verified experimentally after construction of the oxidizer tank [11]. Hence, the pressurant gas was approximated via an iteratively mass balance considering both, the oxidizer tank and the pressure vessel, followed by a detailed numerical real gas simulation with the open-source software tool Cantera for chemical kinetics [14]. For consideration of thermodynamic real gas effects, including the Joule–Thomson effect, a wide-range Helium equation of state in the form of Eq. 5 was implemented [15].
Cantera was used to set up the reactor network and to integrate simplified models of the corresponding valve mass flows. The operating pressure and gas temperature of the oxidizer tank and the pressure vessel over the complete burn time is visualized in Figs. 4 and 5, respectively.

Operating pressure and gas temperature of the oxidizer tank over burn time

Operating pressure and gas temperature of the pressure vessel over burn time
Because of its thermodynamic behaviour, the use of Helium as a pressurant gas is advantageous. The Joule–Thomson effect is a significant thermodynamic effect of heating and cooling of a gas under isenthalpic compression or expansion, depending on the Joule–Thomson coefficient. Since the inversion temperature of Helium is relatively low (around 40 K [16]), the Joule–Thomson coefficient is slightly negative and the temperature will rise when the gas is expanded. This implies the initial temperature increase inside of the oxidizer tank, which can be seen within the first 4 s of simulation time in Fig. 4. Here, both tanks are nearly at ambient temperature. The expansion of the pressurant gas inside of the pressure vessel is not isenthalpic, since the outgoing mass flow causes a related enthalpy flow. Therefore, the pressurant gas inside of the pressure vessel keeps cooling down, which overcomes the heating effect with proceeding simulation time. The resulting pressurant mass for keeping a constant pressure level in the oxidizer tank is around 2 kg, which corresponds to a volume of approximately 21 l, which is in good agreement with other analytical approaches.
Besides the described components, the pressurization system comprises the access ports to both tanks. Those need to be attached to quick-lock connections to provide the possibility of automatically fuelling and pressurization of the tanks. The main parameters of the fluid and pressurization system are summarized in Table 3.
2.3 Structural design and further subsystems
The outer diameter of the third stage is set to 438 mm according to the payload adapter of the launch system. As the rockets primary structure, a lightweight aluminium material is chosen. Alternatively, a carbon fibre-reinforced thermoplastic (CF-PEEK) with an automated fibre placement can be evaluated in terms of structural mass and overall cost. This hybrid structure was developed at the DLR and is already flight-proven on a VSB-30 mission [17]. The cylindrical laminate is mounted to aluminium RADAX (radial-axial) joints. These connectors are typically used on the launch system and payload modules of previous projects. This supports a consistent and uniform assembly process. The structural segments are shown in Fig. 2.
Besides the propulsion modules and the primary structure, a recovery system and service module are required for a fully functional upper stage. These modules are described in the following sections. The actual payload of the overall rocket system will consist of sensors for operational monitoring and additional scientific instruments.
2.3.1 Recovery system
The outer geometry of the ogive nose cone is set by the European Recovery System to a 3:1 fineness ratio. The forward portion is separated exoatmospherically. The aft portion contains the two-staged parachute system, consisting of a drogue and a main chute. The ERS is also flight-proven on several VSB-30 missions and able to recover payloads of 450 kg with an outer diameter of 438 mm. It ensures a stable sink rate of approximately 8 m/s [7].
2.3.2 Service module
The sounding rockets service module comprises the main electrical system with its electronic boards, sensors and batteries as well as pressure reservoirs for the reaction control system. Due to its very specific requirements, the service module and its capabilities must be optimized to the final upper stage design. To estimate the mass and length of the service module in this study, the very suitable TEXUS Service Module (TSM) is considered as a first approximation [18]. As well as the ERS, the TSM is a cooperation development of the DLR and the industry. It is built for the use on the TEXUS sounding rocket missions. The complete module weighs 38 kg and has a length of 370 mm. It is adjusted for the use on the VSB-30 and is mounted via RADAX joints.
Additionally, the TSM comprises the Rate Control System (RCS). It consists of a valve and pressure regulator set which is supplied by nitrogen gas tanks. The dual stage control mechanism avoids centrifugal accelerations, which would affect scientific experiments. A total of eight nozzles expands the pressurant gas to control lateral pitch, yaw and roll rates [18]. Though, a new system with customized properties must be developed, the TSM can be considered as a suitable basis.
2.4 Upper stage performance
With the definition of the subsystems and measured VISERION engine test data, a simulation of the trajectory could be performed. Two scenarios are considered: a three-stage flight starting after the decoupling of the third stage and a single-stage flight necessary to qualify the overall system. In both scenarios aerodynamic drag is modelled with a barometric formula for the air density. The acting forces on the rocket body are summarized via
With the engine thrust \({F}_{t}\), the drag \({F}_{D}\), which is calculated with a drag coefficient \({C}_{D}\), and the gravitational force \({F}_{G}\), the apogee of each flight configuration can be estimated. Since the decoupling of a VSB-30 payload typically takes place above an altitude of 70 km, the aerodynamic coefficients have a smaller impact on the trajectory than the payload mass. Therefore, the upper stage mass is varied between 410 and 450 kg, to cover realistic changes in the ongoing design process. The simulated trajectory is visualized in Fig. 6. It is assumed that the impact off the upper stage mass on the performance of the launch system can be neglected. Hence, the simulated trajectories start at the same separation point. With an altitude of over 400 km, the three-stage flight increases the microgravity flight time to up to 10 min.

Flight trajectory of the three-stage flight with varying upper stage mass
Different to the first scenario, the single-stage flight depends significantly on the aerodynamic drag coefficients. Since the pre-design described in this paper is not optimized with respect to possibly necessary fins, the second simulation was conducted with varying drag coefficients and a constant take-off weight of 425 kg. To qualify the single stage system, operational data of each subsystem can be transmitted for more than 2 min of total flight time as can be seen in Fig. 7.

Flight trajectory of the single stage flight with varying drag coefficient
3 Numerical simulations
In the previous section, all subsystems that are necessary for proper operation of the upper stage, were described. To conduct numerical studies, the axial mass distribution and the outer geometry must be defined. Therefore, the respective masses and lengths are summarized in Table 4, which represents the preliminary mass and length budget of this study. The results of the complete upper stage are similar to comparable projects which were launched on the VSB-30. The total length of the sounding rocket system defines the complete outer geometry. The rocket body is considered as a cylindrical tube with a change of diameter on the interstage adapter between the second and the third stage. The rocket nose cone is modelled with an 3:1 fineness ratio as described in Sect. 2.3.1. The S-31 and the S-30 booster stages are each comprised with three fins. In the case of unstable flight conditions, more aerodynamic elements can be added.
3.1 Numerical setup
To evaluate the static stability of the pre-design, characteristic flight states in the ascent phase were simulated with three-dimensional CFD methods using the DLR TAU-Code [19]. The scenarios comprise different Mach numbers starting in the transonic flight up to the hypersonic flight state of \(Ma=6.49\). They include all characteristic trajectory points such as Mach 1, stage separation, maximum dynamic pressure and minimum static margin. A summary and description of each flight state is shown in Table 5. Stage separation of the launch system occurs between the flight states of scenario 2 and 3.
Since comparable VSB-30 mission have shown that the static margin at launcher exit is above the minimum static margin, which is typically reached after maximum dynamic pressure, the subsonic regime is not analysed in this pre-study [20].
Numerical meshes were generated for the three- and two-staged flight configuration since some scenarios occur before and after separation of the first booster stage (see simulation scenario 2 in Table 5: Burnout S-31). Both of them consist of a triangular surface grid, close-contour prismatic cells and a tetrahedral far-field. To evaluate the mesh resolution, a convergence study was carried out using various scaling factors in mesh generation. The overall convergence rate as well as the absolute values of aerodynamic coefficients were considered to find a suitable compromise between simulation accuracy and computational effort. The differences between the coarse, medium and fine mesh are illustrated in Fig. 8 on the example of the pitching force coefficient. The scenarios were simulated using the viscous RANS equations and the negative Spalart–Allmaras one-equation turbulence model which represents an industrial standard [21].

Comparison of pitching force coefficients on different mesh resolutions
Heat fluxes were modelled with an isothermal boundary condition of 423.15 °C, which is a suitable assumption based on the properties of the ablative paint used on the forward and aft nose cone of the ERS [7].
3.2 Flight stability
After reaching a converged state, the simulation data includes information about the flight stability. Representative simulation results are shown in Figs. 9 and 10 for the two-staged simulation cases. The pitching moments and pitching forces (see Fig. 8) were evaluated to calculate the axial locations of the center of pressure. Therefore, both values are divided for an angle of attack of one degree. By comparing it to the center of gravity, the static flight stability was estimated to be above 1 cal in every simulation case. The unit calibre refers to the rocket outer diameter of 557 mm. Further simulations were conducted to identify the exact point of minimum static margin which was shown to be above 1.17 cal. In conjunction with the use of CFD methods, this value can be considered as a sufficient flight stability. The static margins of the simulation cases are summarized in Table 6.

Density distribution in the flow field and pressure coefficient on the surface (case 3)

Mach number distribution in the flow field and pressure coefficient on the surface (case 6)
3.3 Mechanical stability
In addition, aerodynamic loads were estimated through the CFD simulations. Structural mechanical loads can be evaluated based on NASA Space Vehicle Design Criteria for combined ascent loads and buckling of thin-walled circular cylinders [22]. In this approach, load ratios are combined through interaction equations. In the case of combined mechanical compression and bending moments, the actual safety factor can be calculated by
The load ratios \({R}_{c}\) for compression and \({R}_{b}\) for bending are determined by dividing the actual load by the maximum allowable loads. The critical stresses are calculated by
Here, the factor \(\gamma\) serves as a correction factor for good agreement with experimental data and is given by
The parameter \(a\) accounts for the actual loading and is \(a=0.901\) for axial compression and \(a=0.731\) for bending stresses [22]. In the case of maximum acting acceleration, aerodynamic and gravitational loads the structural safety factor, according to Eq. 7, is \({S}_{cb}>9.8\), which can be considered as sufficient mechanical stability.
4 Future tasks
The comprehensive calculations and overall architecture of the pre-design must be considered as preliminary until additional in-depth analyses and tests are conducted. To obtain realistic and detailed requirements, a mission profile has to be defined. The objective of this mission depends essentially on the scientific payload as a main part of the flight test and complementary technologies which are to be demonstrated. This may be the conduction of experiments at larger flight periods or engine thrust throttling and thermal control of the outer structures, respectively. With the defined flight trajectory, thermal loads can be estimated more detailed and the structural design can be optimized in terms of wall thickness and additional thermal protection systems. Other subsystems depend heavily on the actual operational parameters of the VISERION engine, which was experimentally tested in 2021. After more detailed evaluations, the fluid and pressurization system can be reiterated to match the actual requirements more precisely. After these steps, the service module can be adjusted to the overall system. This includes primarily the electrical system which is not analysed in detail yet. Pressurant masses, battery capacities and service module sensors can then be updated to the next design iteration. Finally, first components can be manufactured and tested. Therefore, a rocket components test bench is realised to conduct qualification tests of fluid tanks, valves and regulators as well as the required sensors. This test bench enables controlled and safe (de-) filling and (de-) pressurization while measuring the required sensor data. The presented upper stage based on the VISERION hybrid rocket engine will be designed in a DLR project starting 2022. For detailed and qualified design, different institutes and departments will iterate the system in terms of flight experiments, structural and thermal control, propulsion module, modelling and simulations as well as qualification and experimental validation. In a first step, the upper stage will be qualified in a single-stage flight which is currently set up for 2025. Afterwards, the three-stage flight shall be conducted in a subsequent project.
5 Conclusion
In this study, a new hybrid upper stage for the highly reliable launch system VSB-30 under the consideration of flight-proven components and modules like the ERS or TSM is presented. The overall system is a suitable option for a first integration of a hybrid propulsion system developed at the German Aerospace Center in a launch system. The resulting mass and length budget of the configuration was similar to comparable projects which were launched on the VSB-30. The dimensioned system has a total length of 5.24 m and a mass of 422.1 kg, considering a payload mass of 50 kg. Initial requirements from the launch site and the launch vehicle were considered to avoid future design issues. Based on this pre-design, sufficient flight stability and uncritical structural loads in the ascent phase of the flight were proven using the DLR TAU-Code for CFD simulations. Thus, it is shown, that hybrid rocket engines can be used as propulsion modules for upper stages. Since they offer the possibility to regulate and interrupt the generated thrust, the trajectory can be adjusted to specific mission requirements. This enlarges the applicability of the complete sounding rocket system. In addition, these hybrid engines combine several advantages, such as cost-efficiency, simplicity and potential reusability. The combination of this economic potential and ecological friendliness is why they represent a promising alternative for common propulsion systems and shall be realised in an upcoming project of the German Aerospace Center.
Abbreviations
- AHRES:
-
Advanced hybrid rocket engine simulation
- CFD:
-
Computational fluid dynamics
- CNG:
-
Compressed natural gas
- COTS:
-
Commercially off-the-shelf
- DBP:
-
Design burst pressure
- DLR:
-
German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt e.V.)
- ECSS:
-
European Cooperation for Space Standardization
- ERS:
-
European Recovery System
- HRE:
-
Hybrid rocket engine
- HTP:
-
High-test peroxide (hydrogen peroxide)
- HTPB:
-
Hydroxyl-terminated polybutadiene
- MEOP:
-
Maximum expected operating pressure
- MDP:
-
Maximum design pressure
- TAU:
-
DLR Navier–Stokes flow solver
- TSM:
-
TEXUS Service Module
- \(A\) :
-
Altitude
- \({A}_{i}\) :
-
Calculation terms for Helium equation of state
- \({C}_{fz}\) :
-
Pitching force coefficient
- \({D}_{m}\) :
-
Mean diameter
- \(E\) :
-
Young’s modulus
- \({F}_{D}\) :
-
Drag
- \({F}_{G}\) :
-
Gravitational force
- \({F}_{t}\) :
-
Thrust
- \({F}_{\mathrm{tot}}\) :
-
Total force
- \({K}_{v}\) :
-
Valve flow coefficient
- \({K}_{Q}\) :
-
Qualification factor
- \(Ma\) :
-
Mach number
- \(p\) :
-
Pressure
- \(Q\) :
-
Volumetric flow
- \(r\) :
-
Radius
- \(R\) :
-
Specific gas constant
- \({R}_{b}\) :
-
Bending load ratio
- \({R}_{c}\) :
-
Compression load ratio
- \({S}_{cb}\) :
-
Compression and bending factor of safety
- \(t\) :
-
Time
- \({t}_{\mathrm{min}}\) :
-
Minimum wall thickness
- \(T\) :
-
Temperature
- \({\sigma }_{\mathrm{max}}\) :
-
Maximum allowable tension
- \(\nu\) :
-
Poisson’s ratio
- \(\rho\) :
-
Density
References
Božić, O., Porrmann, D., Lancelle, D., Hartwig, A.: Program AHRES and its contribution to assess features and current limitations of Hybrid Propulsion. In: 63rd International Astronautical Congress, IAF, Naples, Italy (2012)
Weihs, H., Turner, J., Longo, J.M.: The Sharp Edge Flight Experiment SHEFEX II, a mission overview and status. In: International Space Planes and Hypersonic Systems and Technologies Conference, AIAA, Dayton, United States (2008)
May, S., Božić, O.: Numerical simulation of the flow and combustion inside the reaction chamber of the AHRES hybrid rocket engine. In: Dillmann, A., et al. (eds.) Notes on numerical fluid mechanics and multidisciplinary design 132—new results in numerical and experimental fluid mechanics X. Springer International Publishing AG Switzerland (2016). (ISBN 978-3-319-27278-8)
Klaus, J. T., Božić, O., May, S., Poppe, G.: Erhöhung des Schubs von Hybridraketentriebwerken durch Optimierung der Brennstofftreibsatzform mit verwundener Finozylgeometrie. In: 65. Deutscher Luft- und Raumfahrtkongress, DGLR, Braunschweig, Germany (2016)
Poppe, G., Božić, O., May, S., Bierwagen, N. M.: Characterization of Regression Rate and Combustion Process in a High-pressure 2D Hybrid Rocket Engine with Optical Access. In: 69th International Astronautical Congress (IAC), IAF, Bremen, Germany (2018)
Palmerio, A.F., Peres da Silva, J.P.C., Turner, P., Jung, W.: The development of the VSB-30 sounding rocket vehicle. In: 16th ESA Symposium on European Rocket and Balloon Programmes and Related Research, ESA, Sankt Gallen, Switzerland (2003)
Hörschgen-Eggers, M., Pfeuffer, H.: European Recovery System (ERS). In: 19th ESA Symposium on European Rocket and Balloon Programmes and Related Research, ESA, Bad Reichenhall, Germany (2009)
European Cooperation for Space Standardization: Space engineering - Structural design and verification of pressurized hardware. ECSS-E-ST-32-02C Rev. 1, ECSS, Noordwijk, Netherlands (2008)
European Cooperation for Space Standardization: Space engineering - Structural factors of safety for spaceflight hardware. ECSS-E-ST-32-10C Rev. 2 Corr. 1, ECSS, Noordwijk, Netherlands (2019)
Ingenieure, V.D., der Elektrotechnik, V., Elektronik, I.: Fluidic characteristic quantities of control valves and their determination. VDI/VDE guideline 2173, Düsseldorf, Germany (2007)
Valencia Bel, F., Lang, M.: The role of different parameters in the pressurant budget of Venus express and its dynamic evolution during the mission. In: Proceedings of the 4th International Spacecraft Propulsion Conference, ESA SP-555, Cagliari, Italy (2004)
Barrère, M., Jaumotte, A., Fraeijs De Veubeke, B., Vandenkerckhove, J.: Raketenantriebe. Elsevier, Amsterdam Netherlands (1961)
Sutton, G.P., Biblarz, O.: Rocket propulsion elements, 7th edn. John Wiley & Sons, New York, United States (2001)
Goodwin, D.G., Speth, R.L., Moffat, H.K., Weber, B.W.: Cantera: an object-oriented software toolkit for chemical kinetics, thermodynamics, and transport processes. https://www.cantera.org. Version 2.5.1. https://doi.org/10.5281/zenodo.4527812. (2021)
Reynolds, W.C.: Thermodynamic properties in SI: graphs, tables, and computational equations for forty substances. CA: Dept. of Mechanical Engineering, Stanford University, Stanford, United States (1979)
Atkins, P.: Physical chemistry, 6th edn. W.H. Freeman and Co., New York, United States (1997). (ISBN 978-0-7167-2871-9)
Chadwick, A.R., Dreher, P.N., Petkov, I., Nowotny, S.: A fibre-reinforced thermoplastic primary structure for sounding rocket applications. In: SAMPE Europe Conference 2019, Nantes, France (2019)
Pfeuffer, H., Ettl, J., Haßenpflug, F.: New Techniques and Instrumentation—TEXUS Service Module (TSM). In: 19th ESA Symposium on European Rocket and Balloon Programmes and Related Research, ESA, Bad Reichenhall, Germany (2009)
Schwamborn, D., Gerhold, T., Heinrich, R.: The DLR TAU-Code: Recent applications in research and industry. In: Proceedings of the European Conference of Computational Fluid Dynamics, ECCOMAS CFD 2006, Egmond aan Zee, Netherlands (2006)
Kirchhartz, R., Schmidt, A., Hörschgen-Eggers, M., Kallenbach, A.: ReFEx launch with a sounding rocket—a challenging mission on a reliable carrier. In: 8th European Conference for Aeronautics and Space Sciences, EUCASS, Madrid, Spain (2019)
Allmaras, S.R., Johnson, F.T., Spalart, P.R.: Modifications and clarifications for the implementation of the Spalart-Allmaras Turbulence Model. In: 7th International Conference on Computational Fluid Dynamics, ICCFD7–1902, Big Islands, Hawaii (2012)
Peterson, J.P., Seide, P., Weingarten, V.I.: Buckling of thin-walled circular cylinders. NASA-SP-8007, Hampton, United States (1968)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests as well as no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Dabanović, A., Martin, J., May, S. et al. Design of a sounding rocket upper stage based on the hybrid rocket engine VISERION. CEAS Space J 15, 467–476 (2023). https://doi.org/10.1007/s12567-022-00451-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-022-00451-2