
Abstract
“Cold atoms” can be used as ultra-sensitive sensors for measuring accelerations and are capable of mapping changes in the strength of gravity across the surface of the Earth. They could offer significant benefits to existing space based gravity sensing capabilities. Gravity sensors in space are already used for many Earth observation applications including monitoring polar ice mass, ocean currents and sea level. Cold atom sensors could enable higher resolution measurements which would allow monitoring of smaller water sources and discovery of new underground natural resources which are currently undetectable. The adoption of cold atom technology is constrained by low technology readiness level (TRL). Teledyne e2v and its partners are addressing this maturity gap through project Cold Atom Space PAyload (CASPA) which is an Innovate UK and Engineering and Physical Sciences Research Council (EPSRC) funded project, involving the University of Birmingham as science lead, XCAM, Clyde Space, Covesion, Gooch & Housego, and the University of Southampton. Through the CASPA project the consortium have built and vibration tested a 6U (approximate dimensions: 100 × 200 × 300 mm) cube Satellite (CubeSat) that is capable of laser cooling atoms down to 100’s of micro kelvin, as a pre-cursor to gravity sensors for future Earth observation missions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
1.1 Existing ground based gravity sensors
Existing ground based gravity sensors are based on classical physics and include methods such as measuring the extension of a spring with a mass attached to it [1] or measurement of the acceleration of a free falling corner cube using lasers [2]. Although these techniques have been refined and optimised a great deal, they can be prone to drift and are susceptible to manufacturing and maintenance tolerances such as mechanical wear [3].
1.2 Cold atoms as sensors
Developments in quantum technology have resulted in the ability to cool atoms close to absolute zero using lasers [4], which is fundamental to cold atom interferometers (CAIs). CAIs have a range of applications from precisely measuring the Earth’s gravitational field [4] to studying the principles of fundamental physics [5]. Measuring the Earth’s gravitational field is useful to aid ground based geological exploration [4], space based Earth observation [6] and can even be used to enhance navigation systems [4], where Global Navigation Satellite Systems (GNSS) are denied.
Cold atom sensors have the potential to offer huge benefits both on Earth and in space. On the ground, cold atom gravity sensors may have use in civil engineering [7] applications such as detecting hazards and features under the ground such as pipes, disused mineshafts or sinkholes; other uses include oil and gas exploration [7]. In space, cold atom gravity sensors could be used to carry out Earth observation to detect and understand mass transport processes [8] which could lead to significant breakthroughs in our knowledge of and ability to monitor key components of the Earth system such as sea level, ice sheet melting and aquifer depletion.
1.3 Cold atom systems in space
Currently there are cold atom systems that have been demonstrated in space on manned space stations. For example, China launched a cold atom clock in 2016 which was demonstrated on board Tiangong 2 [9]. This was a successful demonstration of a cold atom clock in space in the Chinese space laboratory which required human operation. In addition to this the National Aeronautics and Space Administration (NASA) launched a Cold Atom Lab (CAL) [10] in May 2018 which has been operated on the International Space Station (ISS). The CAL dimensions are 46 cm × 30.5 cm × 58.5 cm and has a mass of 45 kg [10]. This, however, is a system aimed at exploring fundamental science and again requires human intervention to operate.
Aside from demonstrations of cold atoms on manned space stations, the MAIUS experiment has demonstrated the autonomous creation of a Bose–Einstein Condensate (BEC) in a sounding rocket [11]. The MAIUS instrument has a height of 281 cm and a width of 50 cm [11]. The demonstrations of cold atoms to date highlight the need for an autonomous cold atom instrument in space for applications such as Earth observation, navigation, and timing.
1.4 Benefits of space based gravity sensors
The sensitivity of a cold atom sensor increases with the square of the measurement time, such that increasing the measurement time by 10 times improves the sensitivity by 100 times [12]. Cold atom measurements are constrained by the measurement time which is driven by the distance the atoms can be allowed to fall. This results in a requirement for extremely long drop towers or expensive microgravity flights. Under microgravity conditions the available measurement time is increased [12] and, therefore, the sensitivity.
Previous missions such as GRACE and GOCE have provided invaluable advancements in Earth observation. The GRACE mission was able to show that one of the contributing causes of sea level rise is due to the large ice sheets of Greenland and Antarctica losing mass [8]. The GOCE mission, has been instrumental in understanding the surface of the geoid (global mean sea level) from information about the Earth gravity field, resulting in providing a globally uniform level of zero height [8]. GRACE Follow-On (GRACE-FO) is continuing on from GRACE and tracking changes in the Earth’s surface mass and water changes. In addition, ESA is planning the Next Generation Gravity Mission (NGGM) to continue on from GOCE [10]. Both ESA and NASA are aiming to use gravity measurements for continuous routine operations rather than one off missions to ensure there are no gaps in the time series. Although there have been huge improvements in the information provided from such missions, there is a need for a next generation of instruments to provide information with higher spatial resolution and measurement sensitivity [8].
1.5 Barriers to gravity sensors in space
Cold atom gravity sensors offer a solution that would aid Earth observation and studies have shown that they could provide better resolution and measurement accuracy than their classical counterparts [13]. The best sensitivities achieved on the GOCE mission for example were in the range of 10–20 mE/√Hz and studies have shown that cold atom technology could achieve a sensitivity level on the order of 5 mE/√Hz [14]. Cold atom technology is currently on the European Space Agency’s (ESA) roadmap for ‘Fundamental Physics in Space’, which illustrates a clear drive towards development of space based CAI instruments [15]. Although there has been a rapid advancement in atom interferometry technology, technology readiness levels (TRL) is still preventing the adoption of space based cold atom gravity sensors. To advance the technology development of the critical subsystems [15], the Cold Atom Space PAyload (CASPA) project addresses some of the key challenges including the size, weight and power (SWAP) limitations by developing and testing a cold atom space payload on a 6U CubeSat (approximate dimensions: 100 × 200 × 300 mm).
2 Cold atom space payload
2.1 Project overview
The aim of project CASPA was to build a system capable of cold atom trapping of rubidium (Rb) atoms autonomously in the space environment. CASPA was the first step to verify the basic concept and gain heritage on the subsystems and overall design of a basic cold atom demonstrator. The next step would be to develop and fly a pathfinder mission that is an actual sensor. The project has been delivered by a consortium of partners led by Teledyne e2v; including the University of Birmingham (science lead), XCAM (Electronics and Imaging Subsystem), Clyde Space (6U Structure & Avionics), Gooch & Housego (Optical Subsystem), Covesion and the University of Southampton (Frequency Doubler—part of the optical subsystem). The project has involved designing, developing, building and testing a prototype model of the CubeSat. The key challenges have included achieving compactness, thermal control and low power consumption while meeting the stringent environmental requirements of launch and the space environment. The selection of low outgassing materials that are suitable for use in CubeSats was also a major constraint on the system design [16].
2.2 Magneto optical trap
The device for trapping and cooling clouds of atoms using lasers is known as a Magneto Optical Trap (MOT). CASPA was designed to create a cold atom trap using a set of six orthogonal, counter-propagating laser beams as well as a quadrupolar magnetic field, an ultra-high vacuum (UHV) chamber and atomic vapour. The laser beams cross at the zero point of the magnetic field within the UHV chamber and the atoms are subject to a velocity-dependent force, which cools them, and a position-dependent force, which traps them [17].
The basic set up of the MOT can be seen in Fig. 1. The laser beams are all equal in energy and the photons from the laser beam are absorbed by the atoms and re-emitted by random spontaneous emission [18]. Each of the six laser beams supplies momentum to the atoms in one direction [18] and the magnetic field provides the position dependence confining the atoms to the centre of the zero point of the magnetic field. To ensure the atoms are slowed down and not accelerated, the laser frequency is slightly detuned to ensure that atoms are only on resonance with a laser beam (and hence only absorb photons) when they are travelling towards it (due to the Doppler shift effect) [17]. For a basic introduction to how cold atoms are used to carry out atom interferometry please refer to Appendix 1 (atom interferometry).

Schematic of an MOT, where the red arrows represent the counter propagating laser beams; blue circles represent anti-Helmholtz coils, black arrows show the direction of the current in coils and the red circle in the centre represents the atom cloud
2.3 Concept of operations
The CASPA system has been designed for a mission that would last a minimum of 6 months, where the payload experiment sequence would be run at least once per week for the operating life of the CubeSat. The CubeSat has been designed with three phases the first being before deployment, while the satellite is in its deployment canister, the second is once it is deployed and initialised and finally once it is commissioned and operating. During these phases there are three modes of operation for the payload, off (0 W power consumed), stand-by (5 W average power consumed) and active mode (12 W average power consumption). During active mode the experiment sequence, which has a duration of approximately 30 min, will be run. Although the baseline experiment sequence will be run with a duration of 30 min, other experimental sequences and durations would be tested. In-between each payload experiment sequence, the payload will be kept in stand-by mode. Standby mode runs the payload in a very low power state, focussed on maintaining the integrity of the vacuum system.
2.4 CASPA design
The cold atom space payload that has been built and tested pushes the boundary on the SWAP of cold atom systems. The entire 4 kg payload fits into a 4U (dimensions approx.: 200 × 200 × 100 mm) envelope within a 6U CubeSat structure. The design of the CASPA payload with this constrained SWAP is based on a prism MOT arrangement achieving the first stage of cooling which is in the order of 100 mK. To achieve sensitivities which are of interest for a gravity science mission, it will be necessary to further cool the atoms into the nano kelvin range. For example studies have shown with an atom temperature of 100 nK a shot noise limited sensitivity of 5 mE/√Hz is predicted [14]. For context GOCE’s target sensitivity was 10–20 mE/√Hz in each axis.
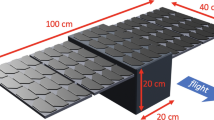
The CASPA satellite consists of four main subsystems designed to interface together to generate a cold atom trap in a circular low Earth orbit (400–550 km altitude); these include the optical subsystem (including the frequency doubler), physics package subsystem (including the telescope), electronics and imaging subsystem and the satellite platform. A low earth orbit with an altitude of 550 km has been selected based on ease of access, cost-effectiveness and to provide a representative environment that a future Earth Observation (EO) sensor payload would see. As CASPA is not a sensor, the actual orbit and altitude has no effect on its operation other than power generation and environmental effects. The layout of the subsystems within the 6U structure can be seen in Fig. 2. The payload has been designed to be powered by battery power generated by the solar panels, with a peak power consumption of 40 W.

Model showing the layout and design of the 6U (approximate dimensions: 100 × 200 × 300 mm) cube satellite with solar panels deployed
The components and subsystems chosen for CASPA have been selected to ensure the design is based on mature technologies capable of surviving the harsh environments of space and launch conditions. Where possible, components with flight heritage have been selected to be used and in some cases component designs have been based on optimising designs of parts that have previously been used in space.
The CASPA system project has been divided into the following subsystems and components:
-
Physics Package (including Telescope) (Teledyne e2v) Which includes a vacuum chamber, Rb atom source, ruggedised telescope to deliver laser light into the vacuum chamber, magnetic field generation and the necessary components to maintain an ultra-high vacuum. Rubidium atoms were chosen as they are a good candidate for atom interferometry and compared to other species lasers for rubidium are more readily available. The physics package approximate dimensions are 110 mm × Ø81 mm.
-
Electronics and Imaging Subsystem (XCAM) Set of experiment control boards which provide the power conversion and logical sequencing of the experiment. This also includes the imaging system which captures and processes images of the cold atom cloud for analysis and downlinking to the ground. The photograph in Fig. 3 shows the experiment control boards as well as an imager board and the imager.
Fig. 3 
a Photograph of XCAM control boards and imager being tested with dummy components to simulate subsystem interfaces (Approx dimensions 95 mm × 90 mm × 46 mm). b Photograph of XCAM’s experimental control boards, imager board and the imager as set up for testing with the breadboard layout of the system
-
Optical Subsystem (Gooch & Housego) which consists of a 1560 nm laser, radiation-hardened Erbium Doped Fibre Amplifier (EDFA) and nonlinear optical frequency doubler (Covesion and University of Southampton). This also includes development of the electronics for laser control, power and frequency stabilisation. The Optical Subsystem (Fig. 4) was manufactured and functionally tested at Gooch and Housego and the University of Birmingham, as part of a breadboard cold atom test system. The DFB seed laser was chosen on the basis that it has been tested to Telcordia GR-468 Core/MIL-Std 883 standards has long term reliability. In addition, the EDFA selected has been tested for radiation hardness up to 100 kRads (Gamma) in another EDFA configuration [19].
Fig. 4 
Gooch and Housego optics module (Approximate dimensions: 200 mm × 100 mm × 20 mm)
-
Frequency Doubler (Covesion and University of Southampton) The frequency doubler physically sits within the optical subsystem and is a rugged 1560–780 nm optical frequency doubler based on a Periodically Poled Lithium Niobate (PPLN) waveguide. Periodically Poled Lithium Niobate (PPLN) waveguides were developed to enable a telecoms standard 1560 nm laser to be converted to the 780 nm required for cooling of Rb atoms in the harsh environment of space. Optical characterisation of these devices is performed to measure wavelength conversion efficiency, operating temperature, operational stability, and ruggedness for the space environment. An example PPLN waveguide chip is shown in Fig. 5.
Fig. 5 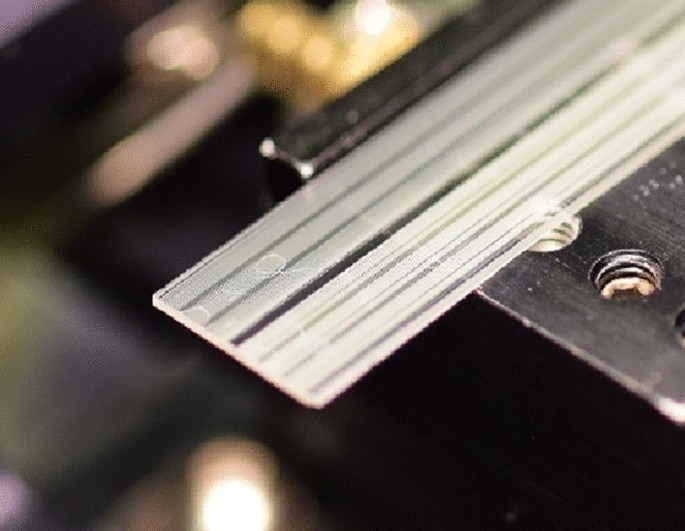
Photograph of a PPLN ridge-type waveguide manufactured by Covesion and the University of Southampton
-
CubeSat Structure and Avionics (Clyde Space) this includes the overall CubeSat platform design, mission Concept of Operations (CONOPS) and thermal analysis. This subsystem includes the 6U mechanical structure, satellite avionics and power generation.



2.5 Environmental modelling
2.5.1 Magnetic field and radiation modelling
Before the requirements were defined, modelling of the radiation and magnetic field environment was carried out using the Space Environment Information System (SPENVIS) tool. The results of this modelling can be seen in Figs. 6 and 7. The requirements of the payload were defined based on these results to ensure a space proof design of all subsystems. For example, the system requirements were set to ensure the system could function in a background magnetic field of at least 55 µT based on the modelling in Fig. 6.

Graph showing the Earth’s magnetic field strength (µT) versus orbit inclination in degrees over one orbit, modelled using web based SPENVIS tool with a constant 400 km altitude orbit

Graph showing total proton radiation fluence (per cm2) over 6 months (during solar minimum), versus altitude in kilometres
In addition to the external magnetic environment that would be experienced by the payload, the magnetic field produced by the physics package itself was considered. The magnetic field produced by the coils was analysed and it was concluded that the field is not sufficient to cause any problems for the CubeSat avionics. In addition to this based on the experimental sequence the coils are only operating for a very short time so any issues can be worked around.
The radiation modelling shown in Fig. 7 was used to set the radiation requirements on the system and to ensure the correct materials were chosen. The total proton radiation fluence per cm2 was set as the requirement for how much radiation selected materials and components should be capable of withstanding.
2.5.2 Thermal analysis
In addition to magnetic field and radiation modelling, the CubeSat design has also been put through thermal modelling to identify and manage the thermal environment that the subsystems will experience once in orbit. This includes modelling the radiative heat transfer between the payload and the Earth, sun and space, the generation of heat by the payload and the avionics, and the conduction of heat through the satellite. This modelling has been used to optimise the CONOPS to achieve thermal stability, to tune the thermal interfaces and thermal control system within the satellite, and to select appropriate materials and coatings used on the external surface to achieve the appropriate overall thermal balance. The analysis was used to set the thermal interface requirements for the payload. One view of the analysis carried out by Clyde Space can be seen in Fig. 8 , which shows the temperature range experienced by the CubeSat in this particular model was between − 10 and + 60 °C. The requirement set on the payload was to be able to operate at temperatures between 0 and +40 °C, once the CubeSat structure design had been optimised.

Thermal analysis results of CASPA CubeSat during orbit, the colour scale shows the temperature of the satellite in °C. Analysis carried out by AAC Clyde Space
2.5.3 Vibration model
As CASPA is designed to be a quick, low cost way of achieving space heritage, the satellite development followed a CubeSat methodology with a lighter process compared to a much larger satellite mission. Additionally, for cost reduction purposes and access to launch slots, CASPA was designed to allow it to be launched on as many launch vehicles as possible. For this reason CASPA was designed to be compliant with the CubeSat standard [20] (which most of the launch providers adhere to) which refers to the NASA General Environmental Verification Specification (GEVS) standard [21] as a suitable generic environmental specification that covers nearly all launch vehicles.
For comparison the ESA European Cooperation for Space Standardization (ECSS) process does not dictate specific vibration levels, only margin over expected launch vehicle levels, assuming the launch vehicle has been determined. The GEVS specification is well suited to the CubeSat philosophy as it is accepted as suitable for most launches. Allowing the design, build and test of a CubeSat without having to confirm the launch vehicle. This provides program flexibility as a launch date can be secured that best suits the project timescales, resulting in reduced timescales and cost. In addition, shock testing is not typically required if the GEVS random vibration test has been met [20]. Although GEVS is essentially an over-test, the engineering cost is typically outweighed by the cost savings associated with having a large number of potential launch providers.
Shock and vibration were perceived as the highest environmental risk on the satellite, so to ensure the robustness of the system the prototype CASPA design was modelled and put through finite element analysis (FEA). This allowed rapid design iterations to be assessed to improve the physical robustness of the system under vibration and shock. This ensured a basic level of design confidence before being physically validated on the prototype build. The results of one of the vibration analyses can be seen in Fig. 9. Based on the modelled results the design was iterated to minimise areas in the structure that were at high risk of damage due to resonances. As well as the use of FEA, items with space heritage were selected were possible, and good engineering practice was employed (such as thread locking).

Random vibration analysis results—Z-axis deformation in meters, during simulated launch conditions. The scale shown under the model reflects the dimensions of the satellite which is 20 cm (width) × 30 cm (height) × 10 cm (depth)
The satellite was modelled against NASA GEVS [20] random vibration test, in the X-, Y- and Z-axes for a 2 min duration per axis, in the frequency range 20 Hz–2 kHz as defined in Table 1.
2.5.3.1 High voltage–power supply vibration test
The high voltage–power supply was available early in the project, therefore, to reduce risk it was vibration tested in isolation. The High Voltage–Power Supply (HVPS) powers the ion pump to generate a vacuum in the chamber, successfully passed GEVS random vibration when tested in isolation. Figure 10 shows the HVPS secured to a test jig for vibration tests. In addition to this the ion pump, which is responsible for maintaining the vacuum and providing vacuum pressure diagnostics, also passed GEVS random vibration when tested in isolation.

Photograph of HVPS as set up for vibration testing on a test jig
2.6 System assembly, integration and test
The final integrated prototype model can be seen in Fig. 11. The prototype system has undergone functional testing and environmental testing according to the NASA GEVS. In preparation for vibration testing the satellite cables were harnessed and routed carefully through the structure to reduce the risk of causing damage or being damaged during the test.

Final integrated CASPA system, including all subsystems, the printed circuit boards (PCBs) at the bottom of the picture were made to be mass representative of the avionics for vibration testing. The payload can be seen in the top 4U of the photograph
2.6.1 Functional testing
The payload was functionally tested using an external laptop to simulate the spacecraft avionics.
The laptop was used to run the payload experiment to enable a cloud of cold atoms to be produced and captured via an imager. To trap the atoms, the laser frequency is varied within a pre-determined range, the photodiode detects fluorescence within the chamber as the laser frequency is varied. When the laser frequency is on resonance with the atoms a fluorescent peak can be seen on the fluorescence scan graph, as shown in Fig. 12. The laser is then locked to this frequency, while an image is taken by the imager of the cold atom cloud. The images of the cold atom cloud and the fluorescence scans gathered by the photodiode are then used to output the number of atoms within the cloud (~ 108 atoms). The imager captures a background image before a cold atom cloud is present and then an image with a cold atom cloud, these are then subtracted from each other leaving only the atoms in the cloud. The brightness of each pixel, exposure time and other parameters are then used to estimate the number of atoms within the cloud. The number of atoms is a measure for how well the system is performing, for a future sensor, the number of atoms will directly affect the sensor performance.

Fluorescence scan obtained from CASPA of fluorescence monitor (arbitrary units) Vs Distributed Feedback (DFB) laser current register value relating to wavelength, the highest peak shows the region of MOT
From the functional tests carried out it is estimated that the temperature of the atoms in the chamber are in the order of 100 uK. For a future sensor, additional steps would be required to cool the atoms to the region of nano-kelvin or lower to achieve the best sensitivities.
Example of the image captured by the payload of the cold atom trap can be seen in Fig. 13.

Cold atom cloud (highlighted by red box) image captured by the XCAM imager during functional testing of CASPA
As the experiment is only expected to run once per week, the data volume is quite low; however, for a future instrument data volume would be a key consideration depending on the frequency of measurements.
2.6.2 Vibration Testing
The satellite was tested against NASA GEVS [21] random vibration test, in the X, Y and Z axis for a 2 min duration per axis, in the frequency range 20 Hz–2 kHz as defined in the Table 1. Figure 14 shows the set up for the vibration test of CASPA.

Photograph of CASPA being vibration tested (X axis test) in Teledyne e2v’s environmental test facility in Chelmsford
CASPA was put inside a vibration jig provided by Clyde Space, which was representative of the pod it would be deployed from once in space. Functional tests were carried out before, after and in between each axis that CASPA was vibrated in. CASPA successfully passed the functional tests. The only issue encountered following vibration testing was a minor intermittent fault on one of the power lines.
3 Future of CASPA
The outcome of the project is a cold atom CubeSat that is constructed from components and subsystems with TRLs ranging from 3 to 9. The 6U CubeSat demonstrates that a rugged cold atom system designed for the space environment, can be achieved in a compact form factor. This paves the way for more complex systems that will be capable of measuring gravity in space.
Although flying CASPA with its current design would be beneficial, the development of a more advanced version of CASPA is being prioritised, to rapidly achieve the functionality and performance required to meet real mission science cases. As a follow on from the CASPA programme Teledyne e2v are developing mission concepts for a space based quantum sensor as part of the Cold Atom Gravity Explorer (CAGE) consortium. This study builds on the CASPA programme and is aimed at developing a quantum sensor for the space environment.
In parallel to these activities Teledyne e2v have been developing a ground-based gravity gradiometer known as REVEAL [22]. The REVEAL instrument is aimed at civil engineering applications but uses some of the underlying principles from CASPA to perform geophysical surveys. Developing an industrial, ground based gravity sensor in parallel with proving the key technology in space will accelerate the journey to a sensitive space based atom interferometer instrument.
4 Conclusion
There exists a well-defined user need for space gravity sensors with improved performance to provide real time Earth observation and enable new, ground-breaking Earth science. The adoption of cold atom technology for space is currently being hindered by low TRL and CASPA addresses this by providing a CubeSat mission which could be used to gain space heritage quickly and at low cost. The cold atom payload fits within 4U, weighs 4 kg and operates on a peak power of 40 W. Although the focus is currently on Earth observation there are many other applications for space based cold atom technology. CASPA is a necessary intermediate step towards the realisation of an autonomous cold atom sensor in space.
References
Chapin, David: Gravity instruments: past, present, future. Lead. Edge 17, 100 (1998). https://doi.org/10.1190/1.1437806
Schwarz, J.P., Robertson, D.S., Niebauer, T.M., Faller, J.E.: A free-fall determination of the newtonian constant of gravity. Science 18, 2230–2234 (1998)
Freier, C., et al.: Mobile quantum gravity sensor with unprecedented stability. J. Phys. Conf. Ser. 723, 012050 (2016)
Wu, X., Pagel, Z., Malek, B.S., Nguyen, T.H., Zi, F., Scheirer, D.S., Müller, H.: Gravity surveys using a mobile atom interferometer, Science Advances 06 Sep 2019: eaax0800
Geiger, R.: Atom interferometry: from fundamental physics to precision inertial measurements. Atomic Physics, [physics.atom-ph]. Sorbonne Université, 2019. fftel-02267800f (2019)
Olivier, C., Christian, S., Luca, M., Roger, H., Pierluigi, S.: Measuring the Earth’s gravity field with cold atom interferometers, arXiv:1506.03989v1 [physics.atom-ph] 12 Jun 2015
Bongs, K., Holynski, M., Vovrosh, J., et al.: Taking atom interferometric quantum sensors from the laboratory to real-world applications. Nat. Rev. Phys. 1, 731–739 (2019). https://doi.org/10.1038/s42254-019-0117-4
Pail, R., Bingham, R., Braitenberg, C., Dobslaw, H., Eicker, A., Güntner, A., Horwath, M., Ivins, E., Longuevergne, L., Panet, I., Wouters, B., IUGG Expert Panel,: Science and user needs for observing global mass transport to understand global change and to benefit society. Surv. Geophys. 36, 743–772 (2015)
Liu, L., Lü, D., Chen, W., et al.: In-orbit operation of an atomic clock based on laser-cooled 87Rb atoms. Nat. Commun. 9, 2760 (2018). https://doi.org/10.1038/s41467-018-05219-z
Elliott, E.R., Krutzik, M.C., Williams, J.R., et al.: NASA’s Cold Atom Lab (CAL): system development and ground test status. npj Microgravity 4, 16 (2018). https://doi.org/10.1038/s41526-018-0049-9
Becker, D., Lachmann, M.D., Seidel, S.T., et al.: Space-borne Bose-Einstein condensation for precision interferometry. Nature 562, 391–395 (2018). https://doi.org/10.1038/s41586-018-0605-1
Ertmer, W., Rasel, E., Salomon, C., Schiller, S., Tino, G.M., Cacciapuoti, L.: Cold atoms and precision sensors in space. Europhys. News 39(3), 33–34 (2008)
Bacchetta, A., Colangelo, L., Canuto, E., Dionisio, S., Massotti, L., Novara, C., Parisch, M., Silvestrin, P.: From GOCE to NGGM: automatic control breakthroughs for European future gravity missions. IFAC-PapersOnLine 50(1), 6428–6433 (2017)
Trimeche, A., Battelier, B., Becker, D., Bertoldi, A., Bouyer, P., Braxmaier, C., Charron, E., Corgier, R., Cornelius, M., Douch, K., Gaaloul, N., Herrmann, S., Müller, J., Rasel, E., Schubert, C., Wu, H., Pereira dos Santos, F.: Concept study and preliminary design of a cold atom interferometer for space gravity gradiometry. Cl Quantum Gravity 36(21):215004 (2019)
Fundamental Physics Roadmap Advisory Team (FPR-AT): A Roadmap for Fundamental Physics in Space (2010)
European Space Agency, Product and Quality Assurance Requirements for In-Orbit Demonstration CubeSat Projects, Issue 1, Revision 1, March 2013, TEC-SY/129/2013/SPD/RW
Metcalf, H.J., van der Straten, P.: Laser cooling and trapping. J. Opt. Soc. Am. B 20(5), 887–908 (2003)
Sproles, D.E.: Laser Spectroscopy and Magneto-Optical Trapping of Rubidium Atoms. Stony Brook University, Stony Brook (2008)
Stampoulidis, L., Edmunds, J., Kechagias, M., Stevens, G., Farzana, J., Welch, M., Kehayas, E.: Radiation-resistant optical fiber amplifiers for satellite communications. In: Proceedings of the SPIE, Volume 10096, id. 100960H 12 pp. (2017)
California Polytechnic State University: 6U CubeSat Design Specification Rev. 1.0 (2018)
NASA: Goddard Space Flight Center, General Environmental Verification Specification, GEVS-SE, REV A (1996)
Teledyne e2v.: Teledyne e2v Quantum Technology Brochure 2017, https://www.teledyne-e2v.com/content/uploads/2017/08/Te2v_Brochure_Quantum_2017.pdf. Accessed 16 June 2020
McKee, M.: Core concept: atom interferometry. PNAS 112(40), 12228–12229 (2015)
Acknowledgements
We thank Innovate UK and the Engineering and Physical Sciences Research Council for the support and funding on the Cold Atom Space PAyload project.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Appendix 1: atom interferometry
Once an MOT has been created the cold atom cloud can be used to carry out atom interferometry. Typically atom interferometers use three laser pulses, the first is used to separate the atom cloud in two, the second pulse inverts the separation and finally a third pulse is used to recombine the atoms again. From this an interference pattern can be observed. If one half of the atoms experience different conditions to the other interference fringes will be visible [23]. As atoms are extremely sensitive, the effects of any perturbation such as from fundamental forces (like gravity) are easily detectable. When the two parts of the atom cloud recombine the interference of the clouds provides a measure of gravity. This process of atom interferometry is illustrated in Fig. 15.

Schematic showing atom interferometry. The dashed grey lines represent the laser pulses that split and recombine the atom cloud and the red circles are the cold atom clouds. Once an MOT is achieved the cloud is subject to the first pulse which separates the cloud in two, the second pulse then inverts the separation and the final pulse combines the atoms
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Devani, D., Maddox, S., Renshaw, R. et al. Gravity sensing: cold atom trap onboard a 6U CubeSat. CEAS Space J 12, 539–549 (2020). https://doi.org/10.1007/s12567-020-00326-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-020-00326-4