
Abstract
A 6U CubeSat for Earth observation in 230–350 km orbits with sub-meter resolution is presented. The proposed Stable and Highly Accurate Pointing Earth-Imager (SHAPE) system’s attitude determination and control system (ADCS) is composed of a single momentum bias wheel with magnetic bearings at rotational speeds of 6000–7000 rpm and refined magnetorquers. Reaction wheels as instability source are absent. The ADCS stabilizes the spacecraft attitude by counteracting the torques from external disturbances in the thermosphere down to < 1° pointing accuracy and < 0.1° instability. The momentum wheel was sized to an angular momentum of 1 Nms based on the worst-case atmospheric density of the next solar cycle. The 0.5 Am2 magnetorquer dipole moment provides with low power consumption, mass and cost, high reliability and sufficient torque. The ADCS initialisation study revealed three stable start-up modes, while the all-spun state is achieved using a set of thrusters. De-tumbling analysis show that the magnetorquers reduce the tumbling rates with magnitudes of up to 35°/s to mean motion values in less than an orbit using a static gain B-dot controller. A 3U camera design capable of sub-meter spatial resolution at 230 km altitude is presented which complies with the SHAPE spacecraft system design. The instrument has a single deployable primary mirror enabled by a deployment hinge design with hysteresis < 0.5 μ. This payload combined with air-breathing electric propulsion technology at 230 km nominal altitude boosts the SHAPE system Earth observation potential down to sub-meter spatial resolution and enables tuning of the mission lifetime by orbit keeping.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The trend toward smaller spacecraft yields the miniaturization of small and low power instruments, subsystems and components. Cubesat Earth observation (EO) missions with high spatial and temporal resolution are increasingly more feasible and can serve in important EO missions enabling environmental studies, defence and disaster monitoring and response. The size of the spacecraft however limits resolutions to 3–4 m at very low Earth orbits (VLEO) due to the maximum aperture of 10 cm as imposed by the CubeSat standard. Currently, spacecraft classified from micro and larger apply three axis control stabilization to allow high pointing accuracies in the order of arc seconds. For nano-satellites and smaller, this is still very complicated to be achieved in a VLEO due to miniaturization problems of attitude control hardware, causing unwanted vibrations to the system. In addition, achieving high resolution at VLEO is also restrained by the denser atmosphere, exponentially increasing at lower altitudes. To solve this problem, a solution has been proposed by the Department of Space Engineering at the Delft University of Technology called the Stable and Highly Accurate Pointing Earth-Imager (SHAPE) [1]. This design utilizes a high speed spinning magnetic bias momentum wheel, providing the spacecraft with resistance against the atmospheric disturbances. This gyrostat concept also known as dual-spin stabilization is a classical form of stabilization which was prevalently used in the early decades of the space age. An inherent problem with a single-spinning platform is that its instrument rotates as well. The development of dual-spin spacecraft also called dual spinners have allowed the separation of the spacecraft (as the name implies) into two components. One of which is the platform providing Earth pointing capabilities and a spinning part called the rotor which gives the spacecraft its spin stabilization. This dual-spin concept, applied in the SHAPE system design, can in principle provide with pointing stability in the dense atmosphere while allowing its high pointing accuracy of 1° and a high spatial resolution in a VLEO mission. These challenges impose hard requirements and constraints, and therefore, the attitude determination and control subsystem (ADCS) is one of its key aspects to its success. The research objective is to come to a feasible spacecraft design for SHAPE’s ADCS to achieve a pointing accuracy of at least 1° and an attitude stability imposed by the payload of SHAPE with a goal value of 0.1°.
2 SHAPE: a highly stabilized VLEO S/C design
2.1 Systems engineering and requirements
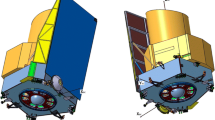
The SHAPE’s ADCS design was inspired by the limitations of spinning large spacecraft designs of the 60 s and 70 s like Ulysses and Cluster. The directional stability of the spin-axis of those S/C being restricted mainly by spacecraft structural instabilities. For a VLEO EO Cubesat spacecraft design a stable S/C structure is required beside strong means to counteract the disturbances from the thermosphere. Therefore, we introduced a magnetic bias momentum wheel internally equipped with thrusters and broad-band dedicated nutation liquid dampers beside actively controlled magnetorquers. SHAPE performs its EO mission equipped with the ANT-3A, a plug-and-play CubeSat camera design developed by the Delft University of Technology. This push-broom instrument with an optimized rectangular aperture, a spatial resolution of about 4 m and a SNR of about 90 can be achieved at an altitude of 350 km for Earth observation in the visible spectrum (450–700 nm). The size of the payload is 10 × 10 × 30 cm (3U). To accommodate the remaining subsystems an additional 3U CubeSat volume has been added. Initially for symmetry purposes, both 3U modules are placed 5 cm away from the momentum wheel, as shown in Fig. 1. This 6U CubeSat design shown was the earliest version. As a follow-up the bias momentum wheel has been resized by a refined trade-off down to a solid Aluminium disk with radius of 8 cm, thickness 1 cm and mass 570 g. This size complies with a single CubeSat unit and enables full integration within a 6U S/C. Other disk geometries and materials enable a further decrease in size and symmetry in its placement within the S/C. For the nominal and maintenance design phases, nutation damping is a prerequisite under the conditions that the nutation angle exceeds 0.1° and at products of inertia of 10% of the moments of inertia.

Preliminary design of SHAPE [1]. Top view showing the photo-voltaics layout
The total mass of the system including the momentum wheel was estimated to be approximately 8 kg including the attitude control subsystem (ACS) mass budget of 800 g with 500 g for the momentum wheel. Additionally, power budgets of 6 W and 11 W have been appointed to the ADCS subsystem for nominal and non-nominal mission operations, respectively. The cost of the ADCS have been estimated at 22% of the total budget. SHAPE’s orbit will be a noon-midnight sun-synchronous orbit (SSO) with an altitude of 230–350 km.
Launch opportunities to the specified orbit altitudes are null or very limited. Therefore, the de-orbiting strategy to achieve a minimal operation orbit altitude of 350 km shall be either ISS deployment and natural decay until final orbit altitude is achieved or a launch to a higher altitude using propulsion to de-orbit. From this preliminary point, the attitude control system is designed in a top-down approach.
In VLEO, the thermosphere contains a low density of molecules. However, these affect the S/C ADCS performance strongly as proven by [2] and [3]. Firstly, the ambient thermospheric temperature of 900–1600 K is relatively high. The molecule density is very low but its changes throughout the thermosphere are significant up to a factor of ten due to the solar flux and magnetic indices. The pressure related to the temperature and density variations behaves comparable. Once these changes in the thermosphere are defined, modelling gets possible. The temperature and densities were calculated by means of the NRLMSISE-00 model. In combination with the Sentman equations [3], it was possible to calculate the lift and drag coefficients of each panel of the CubeSat design, as shown in Fig. 2.

Preliminary design of SHAPE [1]—thermospheric simulator delivering the drag (CD) and lift (CL) coefficients versus the pitch angle θ in degrees. These dominate the ADCS design
2.2 System design and payload pointing accuracy
Dual-spin-stabilization [4] is quite a challenge using spin and 3-axis control simultaneously. The pitch spin stabilisation is provided by a large momentum wheel placed in between two 3U CubeSat elements. Using a large enough angular momentum, the disturbances of the environment can be overcome. Magnetorquers are added to accomplish 3-axis ADCS control. A refined magnetorquer system design is designed in collaboration with Hyperion Technologies in Delft. The design incorporates a control loop design over the specific orbit accounting for the B-field variations and the anomalies at the poles. The lower the VLEO orbit the stronger the effect of the magnetorquers becomes due to the increase in the B-field strength of the Earth’s magnetic field. However, these 0.5 Am2 torquers are not strong enough to provide with the major inertia axis spin-up as required in the ADCS acquisition phase. This will be dealt with in Chapter 3 which deals with the basic elements of the ADCS system design.
The system requirements are listed in Table 1 and briefly elaborated on its rationale whereas necessary. Note that the definition of system in this context is regarded as the attitude system. The first requirement (S.1) is the main objective for the momentum wheel design. There are multiple methods in which the pointing accuracy requirement can be derived. This can either be related to solar panel pointing or orbit manoeuvres, but in general this is raised from the requirement related to the main payload.
There are three drivers for the pointing accuracy requirement S.1 given above in Table 1:
-
1.
Position the observational target within the field of view (FOV).
-
2.
Reduce overlapping with a previously imaged location.
-
3.
Demonstrate high pointing performance for CubeSat missions.
The operational altitude range defined in requirement (S.2) is determined from the orbital decay. To sustain approximately 6 months of mission operation, a CubeSat should initiate its mission at around 380 km. This is due to the high atmospheric drag present at VLEOs inducing an exponential drop in altitude. Furthermore, this altitude is required for a spatial resolution of less than 4 m. To have a sustained momentum wheel rotation, the wheel is spun upon magnetic bearings to minimize friction and S/C instabilities throughout its lifetime (S.3). The momentum wheel, as a totally decoupled subsystem, will be spun-up once (blow-down system) with a set of TU Delft resisto-jets for technology demonstration (S.4) [5]. The magnetic bearings require a minimum of 5000 rpm of the momentum wheel to function. A value of 6000–7000 rpm is expected to sustain a value above the minimum velocity throughout the lifetime.
To elaborate more on the pointing accuracy requirement (S1), the effects of linear and sinusoidal motion, and jitter on the modulation transfer function (MTF) have been determined to comply with requirement (S.6). While the sensor is activated for measurement, linear motion can cause a smear on the image as the spacecraft is traveling along the Earth’s surface. This direction can be assumed to be aligned to the spacecraft’s orbital velocity. In general, rotational motion of the Earth contributes to a small transverse motion which is negligible. Sinusoidal motions associated with periodic disturbances such as nutational or resonance S/C platform motion, result in image blurring. Similarly, random high frequency motion reduce the image quality. The frequency and amplitude of the jitter are however superimposed and a probabilistic approach is usually taken to determine the MTF. The MTF for these cases are defined by [6] and have been elaborated to derive the ADCS rotational requirements. Other MTF contributions which impact the image quality are the effects of particles in the atmosphere which are harder to estimate. Instead, the required MTF value related to the ADCS was approximated based on two reference optical payloads: Hyperion [7] and GeoEye-1 [8]. At visible wavelengths, the Hyperion payload was given a requirement value > 20%, while pre-flight MTF measurements showed a value of 20–29% depending on the wavelength and field of view angle. For GeoEye-1, the system MTF was found to be 14%. On basis of this a system target value was taken of 15% for SHAPE and a desired value of 20%. The 52% payload value is relatively high, since the square sensors consume already about 63% of the MTF budget. To ensure that uncertainties are within specification, an additional 50% MTF contingency has been taken in addition to the payload MTF. The MTF analysis given by [6] was used to determine the target and desired MTF values for the ADCS to be 58% and 77%, respectively. Regarding the baseline altitude h = 350 km and a GSD of 4 m a compliant dwell time τ = 0.55 ms is taken. The maximum allowable angular deviation in the instrument nominal pointing is approximated by k.GSD/h with k within the stability range 18–26% of the pixel size. This results in a value of 3 µrad for the target value, while the maximum allowable angular velocity becomes 5.5 mrad/s. These values become 2.1 µrad and 3.8 mrad/s for the desired value. It should be noted that these values correspond to the pitch axis, since the MTF due to linear motion is not applicable to the other two axes. The difference however is less than 5%, and therefore, for all axes, the maximum allowable pitch angular velocity is taken as the general angular velocity constraint driving the ADCS subsystem design.
2.3 Tuned payload and ADCS design
The SHAPE S/C operates within a lifetime of approximately 200 days without active orbit keeping followed by a rapid descent. Research and development towards air-breathing electric propulsion technology (see Fig. 3) may enable missions in very low earth orbits in the range 150–200 km at extended lifetimes with orbit keeping. This option is being studied together with our partner Stellar Space Industries in Leiden. As will be pointed out later in Chapter 3 four thrusters are also needed to boost the major axis spin-up option of the SHAPE system in the early ADCS acquisition commissioning phase.

Airbreathing electric propulsion technology in the altitude range 150–200 km being developed at Stellar Space Industries in cooperation with Hyperion Technologies B.V. This preliminary design shows the air-intake (left) and the electric propulsion unit (right)
The ANT-3A instrument design offers [1] a 4 m resolution at an altitude of 350 km which improves to 2.6 m at 230 km altitude. The baseline ANT-3A VLEO optimized design was achieved using an Off-Axis Modified Ritchey-Chretien Telescope in combination with two corrective lenses which enables a rather compact design solution (Table 2). The research and development of advanced hinges together with ADS Leiden and Dutch Aerospace Institute (NLR) as partners is another key research area to enable deployable optics. This solution to enlarge the effective aperture in combination with the 150–200 km orbits enabled by air-breathing electric propulsion technology can in principle push the spatial resolution down to sub-meter resolution using a 5U-6U CubeSat spacecraft.
The required pointing stability of the SHAPE S/C platform to ensure sufficient image quality imposed a pointing accuracy of 1.0° to operate this payload design [1].
3 Attitude determination and control
3.1 Bias momentum wheel sizing
An extended ADCS top-down study was performed with basic elements, as shown in Fig. 4.

ADCS design analysis iteration
The momentum wheel sizing is based on the maximum solar cycle #25 impact mass density impact, as shown in Figs. 5 and 6, taken on the datum with the lowest lifetime at 95% confidence. The date of this predicted occurrence is at the 237th day of the year 2023 and the spacecraft is expected to have a lifetime of 169 days. For this particular orbit propagation, the density and torque profiles are shown in Fig. 6 by the blue coloured curves. The predicted atmospheric densities for the 95% and 50% confidence intervals showed a large deviation yielding in lifetime differences of more than half a year. Due to the exponential increase in aerodynamic disturbance torque over its lifetime, the design point located at 90% into the lifetime was taken. It was found that the mass of the momentum wheel could be reduced by 400 g and the radius by 2 cm assuming a disk-like structure. The selection of this lifetime was made in consideration of: possible control actuators, mass constraint of the wheel, maximum and minimum of half orbit requirement for maintenance and nominal operations, respectively, to optimize the Earth observation time. Assuming that the momentum wheel is made out of Aluminium, it has been estimated to have a radius of 8 cm, a thickness of 1 cm and a mass of 570 g. This resulted in a 1.0 mNm required momentum driven by the criterion to sustain half the orbit of continuous mission operation.

Solar flares and predicted impact values for solar cycle #25 max case at 230 km altitude

Worst case disturbance profiles for solar cycle #25 max case at 230 km altitude
An magnetic bearing design was chosen to allow the bias momentum wheel to spin freely without vibrations. This condition is optimized by the addition of passive liquid dampers which are tuned and incorporated in the design to attenuate residual vibrations [9]. This nominal spin condition minimizes also the vibrations which are transferred to the satellite structure. At the spin start-up ball bearings are used to ensure smooth rotation until an angular velocity of about 5000 rpm is achieved. At this angular speed the bearing switches to the magnetic levitation mode using a centrifugal control [1]. The design angular velocity is 7000 rpm to increase rotational stiffness and guarantee a final velocity of 5000 rpm at the end of the mission life. WiFi controlled propulsion is applied to spin up the momentum wheel to 7000 rpm. Two MEMS resisto-jet thrusters, designed by the TU Delft, are incorporated into the momentum wheel design [5]. Each thruster being connected to a tank of bio ethanol, while two redundant tanks are interconnected. The momentum wheel can be spun up to 7000 rpm in less than 40 h. This happens once, the propulsion system being a blowdown system. The integrated momentum wheel propulsion concept is shown in Fig. 7. The power subsystem sizing of the battery took a pre-mission phase into account mainly covering the boot-up of all subsystems and the de-tumbling phase. Due to the fact that a slip ring could not be installed in the momentum wheel to provide power to the propulsion subsystems, an additional battery was installed in the momentum wheel. This battery provides with enough power for the thrusters of the propulsion subsystem. The magnetic cleanliness is an important issue which needs special attention but is regarded to be solvable. The magnetic bias momentum wheel system development is a common project led by the TU Delft together with TNO and Hyperion in Delft.

SHAPE integrated momentum wheel propulsion concept without the nutation liquid dampers
3.2 Attitude determination and control
The conceptual spin-up strategies of the SHAPE platform are depicted in Figs. 8 and 9.

SHAPE conceptual spin-up strategies with MW = (bias) momentum wheel

SHAPE conceptual spin-up strategies being sequential or concurrent
The main results from the extended simulations and research considering multiple spin-up scenarios are shown in Fig. 10 and Table 3. Locking states have been taken into account. Table 3 summarizes the main results for spin-ups in the acquisition phase about the minor and the major axis with the largest moment of inertia with and without passive nutation dampers. The sequential spin-up strategy about the major axis in the acquisition phase, as depicted in Fig. 9, is most promising. This is shown explicitly in the simulation results of Fig. 10. In about 0.6 orbit the angular moment H is stabilized along the pitch axis which is shown in the momentum sphere analysis results of the right picture as well. The all-spun state is achieved using a set of thrusters. This choice was taken as magnetorquers were found not capable to deliver sufficient torque. A dipole moment of 0.5 Am2 was chosen for reasons of low power consumption, mass, cost, and high reliability while capable of producing sufficient torque. From the de-tumbling analysis, it was concluded that the magnetorquers are able to reduce the tumbling rates with magnitudes of up to 35°/s to mean motion values in less than an orbit using a static gain B-dot controller.

SHAPE acquisition mode: sequential spin-up about the major axis with passive nutation damping
Damping to attenuate nutation is integrated in the ADCS design. In the nominal and maintenance ADCS phases, damping was found to be necessary under the conditions that the nutation angle exceeds 0.1° at a product of inertia of 10% of the moments of inertia. This angle corresponds to a transverse momentum of 1.7 mrad/s which is a considerable part of the attitude stability margin, target value 5.5 mrad/s and desired value 3.8 mrad/s (derived in Sect. 2.2). Due to the asymptotic stability properties, transverse momenta of 1.5 mNms can be damped to minimal values in less than 0.1 orbits. This is especially significant if the momentum wheel is unbalanced, producing an undesired torque and parasitic angular momenta. The major axis showed very low nutation angles after completion which is critical as otherwise the system loses its pitch controllability due to the effect of gyroscopic coupling. During the spin-up, an unbalanced momentum wheel can cause dynamic imbalance to the system for which it can be captured in a so-called resonance trap. If the system is captured, the nutation angle will increase violently. The effects of momentum wheel’s static and dynamic imbalances causes high internal disturbances. To reduce these, the spacecraft requires very strict mass positioning of subsystems. The momentum wheel suspension subsystem is also required to have isolators to damp the high frequency disturbances induced by imbalance.
4 Conclusions
The SHAPE platform has a high potential for VLEO missions down to 230 km (and possibly lower) enabling sub-meter EO spatial resolution. However, the low TRL levels of the deployable camera concept and the magnetic momentum bias wheel obstruct the further development at this moment. In a strong commitment with the Dutch space high-tech industry the research and development on these issues is pursued. Meanwhile, considerable progress has been made in the scope of a deployable camera concept to enlarge the aperture. A novel CORE hinge design with an deployment hysteresis smaller than 0.5 μ has been developed at the TU Delft supported by Airbus Defence Systems in Leiden. This value is comparable with the hysteresis performance of the James Webb Space Telescope secondary mirror hinges [10].
The ADCS study has shown that the sequential major inertia axis spin-up in the acquisition phase is the best candidate for the ADCS initialisation. Damping allows to minimize the nutation angle and is, therefore, decided to be integrated into the ADCS design. This is especially significant if the momentum wheel is unbalanced, producing an undesired torque and parasitic angular momenta. The major axis showed very low nutation angles after completion which is critical as otherwise the system loses its pitch controllability due to the effect of gyroscopic coupling.
The majority of stringent requirements resulted from the effect of momentum wheel’s static and dynamic imbalances causing high internal disturbances. To reduce these, the spacecraft requires very strict mass positioning of subsystems. The momentum wheel suspension subsystem is also required to have isolators to damp the high frequency disturbances induced by imbalance. Under the assumptions that these motions can be damped, SHAPE is expected that at the design point of 280 km altitude can achieve 1° pointing performance and fulfil the attitude stability (MTF) requirement values under worst-case conditions. These assumptions have to be verified by further thorough analysis on basis of compliant top-down and bottom-up system engineering budgets.
References
Kuiper, J.M., Dolkens, D.: Advanced EO systems with high spatial resolution. In: The 4S Symposium pp. 1–5 (2016)
Klinkrad, H., Fritsche, B.: Orbit and attitude perturbations due to aerodynamics and radiation pressure. In: ESA workshop on space weather, ESTEC, Noordwijk, Netherlands (1998)
Doornbos, E.: Thermospheric density and wind determination from satellite dynamics. Springer Science and Business Media, Berlin (2012)
Hughes, P.: Spacecraft attitude dynamics. Dover Publications, New York (2004)
Cervone, A., Zandbergen, B., Guerrieri, D., e Silva, M.D.A.C., Krusharev, I., van Zeijl, H.: Green micro-resistojet research at delft university of technology: new options for cubesat propulsion. CEAS Space J 9(1), 111–125 (2017)
Sandau, R.: Digital airborne camera: introduction and technology. Springer Science and Business Media, Berlin (2009)
Nelson, N.R., Barry, P.: Measurement of hyperion mtf from on-orbit scenes. In: Geoscience and remote sensing symposium, 2001. IGARSS’01. IEEE 2001 international, vol. 7, IEEE, pp. 2967–2969. (2001)
GeoEye: Geoeye-1 instrument/product description. (2009) https://www.ugpti.org/smartse/research/citations/downloads/Digital%2520Globe-GeoEye-1_Product_guide-2014.pdf. Accessed 15 May 2016
Kuiper, H., Bongers, E.: Flight nutation validation of the COS-B and equator-S spacecraft. In: Advances in Aerospace Guidance, Navigation and Control, pp. 721–740, Springer (2013)
Kuiper, J.M., Dolkens, D., Villalba Corbacho, V.: The Delft deployable space telescope project, IAC Washington 2019, paper IAC-19,B1,3,9,x54589, Oct 2019
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kuiper, H., Dolkens, D. A cutting edge 6U CubeSat ADCS design for Earth observation with sub-meter spatial resolution at 230–380 km altitude. CEAS Space J 12, 613–621 (2020). https://doi.org/10.1007/s12567-020-00323-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-020-00323-7