
Abstract
Inflatable space structures have many advantages such as small size, high reliability, and low cost. Aiming at a gravity-gradient boom for an XY-1 satellite, New Technology Verifying Satellite-1, a slender inflatable boom with low magnetic is presented. First of all, an inflatable boom with six self-supporting thin shells made of carbon and Vectran fiber composite materials on the inner wall was designed for eliminating a magnetic dipole moment and increasing structural stiffness. A precise stowage was designed for a tip mass surrounded by a pair of lightweight honeycomb blocks added on the top of the boom. The stowed boom was tested by sine sweep vibrations with three directions on the ground to verify the reasonable design. The XY-1 satellite which carried the inflatable boom was launched into low orbit. After being stowed state in space for at least 6 months, the inflatable boom orderly unfolded a 2.0 kg tip mass to 3.0 m away in May, 2013. The inflatable boom was successfully deployed from a series of photographs received on the satellite. The results show that this kind of lightweight inflatable boom with self-supporting thin shells can orderly unfold and fulfil the function of gravity-gradient in space for a long time.
Similar content being viewed by others


1 Introduction
Ultra-lightweight inflatable space structures have been accepted by more and more scholars, because they can meet structural requirements for space applications with low cost and give a reliable deployment, since an inflatable deployment does not need any electric motors or moveable parts. Moreover, several space missions have considered the use of the lightweight inflatable structures for components such as booms, sunshades, solar concentrators, solar array, solar sails [1], and deployable antennas [2] for many aspects of earth and space explorations. As a prelude to these missions, an inflatable antenna experiment was deployed in 1996 to demonstrate the reliability of the inflatable technology for a large 14 m antenna structure in a realistic space environment [3]. Results indicate that uncontrollable deployment will induce the chaos order during inflation. The same challenging deployment technique is required for the stowage of large gossamer structures. The key elements are the booms which must be stowable in a very small envelope before they reach their destination in space. Black et al. designed and manufactured a 14 m-long coiled carbon fiber boom applied to a solar sail. The boom is equipped with a Velcro® strip on each side during coiling the hooks on one boom side lock into the loops on the opposite boom side, so that a spontaneous self-deployment of the packed boom is prevented [4]. Based on the inflatable method by progressively breaking up the Velcro connections of folded boom, The XY-1 small satellite which carried an inflatable gravity-gradient boom was then launched into orbit in November 2012. After being kept stowed in space for at least 6 months, the deployable boom orderly unfolded a 2.0 kg tip mass to 3.0 m away in May, 2013 [5]. Deployment in space was consistent with the deployment testing on the ground.
For large inflatable space structures, physical testing of folded booms in weightless environment is difficult. Analytical simulation of the stowage and deployment can be an effective way to assess in-space stowage and deployment of these booms prior to actual space mission. There are many simulations works [6,7,8,9] using rigid body kinematics and control volumes based on some ideal assumptions. Some simulation results show that the magnitude of boom tip vibration does not increase significantly in amplitude until the final 1/3 of the deployment time span [9]. This may be attributed to the resonance effect of the system’s natural frequency.
Both stowage and support stiffness after deployment design are very important for inflatable space structures implementing their mission [10]. To facilitate effective designs of these inflatable space structures, the behaviors of their fundamental structural elements, the inflatable booms, need to be thoroughly characterized and understood. Lichodziejewski et al [11] designed two inflatable booms with 10.2 cm in diameter and 3.25 m in length to unfold a solar array (0.74 m × 3.25 m). The stowed dimensions with z-folded booms are 16.25 cm × 21.33 cm × 113.28 cm, including the inflation system. Black et al. designed a rigidizable inflatable boom, which was run on board Endeavor with 50.8 cm-long carbon fiber composite tube with Z-folded (mass 188 g/m excluding end caps) [12]. Lou et al. designed a boom with 7.62 cm in diameter and 5 m in length. The reinforcement tapes were four steel carpenter tapes. The boom was flattened and tightly rolled up on mandrel in 16.5-cm diameter. The nominal weight of the boom specimen was 180 g/m (excluding the end caps) [13]. The inflatable boom in this paper is compared with a design of coilable mast as the same mission of gravity gradient. The latter with 10 cm in diameter and 2.0 m in length will be designed to unfold a 5 kg tip mass. The mass of mast is 150 g/m (without tip mass) [14]. The diameter of the former in one end is 5 cm and the other end is 6 cm, the mass is 182.4 g/m (excluding both 73.2 g end cap and 39.5 g top cap), and the former with 3.0 m in length including 2.0 kg tip mass was successfully deployed in space.
This paper is intended to demonstrate the feasibility of using lightweight and low-stowage volume inflatable space structures for space mission applications. First, a gravity-gradient boom consists of an inflatable boom with a length of 3.0 m and a 2.0 kg tip mass, to realize the gravity-gradient function for the XY-1 satellite. The self-supporting thin shells are designed to enhance the inflatable boom stiffness after deployment by carbon and Vectran composite materials, and the magnetic dipole moment of thin shells meets the design requirement. In addition, the stowage of inflatable boom also is designed using a pair of honeycomb blocks to also meet the design. Second, the unfolding and stowage of the inflatable boom were tested to verify these designs. Finally, the in-space inflatable process was presented through pictures of the 3.0 m inflatable boom, and changing data before and after deployment on the satellite.
2 Structure stiffness design
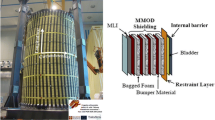
Gravity-gradient booms, which are deployable arms that move steadily a certain mass along a certain direction on satellites, changing their centroid and moment of inertia, are made up of an inflatable boom, a tip mass like a dumbbell, a pair of honeycomb blocks on both sides of the top cap of the inflatable boom, a high-pressure vessel, inlet control valve and electronic expansion valve, an electric control panel, a container, and two V-groove stowage locks, which effectively constrain six degrees of freedom of the tip mass (Fig. 1). The inflatable boom is made up of a laminate aluminate wall (made up of Kapton®/Al/ Kapton®), two pair of Velcro® strips on the outer wall, six self-supporting thin shells (Fig. 2) on the internal wall, a closed film chamber, and both top and end caps. The top cap is used to connect with the tip mass, and the end cap with the container.

Design of the gravity-gradient boom (stowage and deployed stage)

Design of the cross section of inflatable boom (a), six self-supporting composite thin shells on the laminated aluminum wall (b), and the wall of boom to be bonded (c)
In the stowage stage, the tip mass on the top of the inflatable boom was stowed in the centre of the boom by six turns according to Archimedes spiral. The tip mass surrounded by the folded boom was installed on the container by two stowage lockers. In space, when the inflatable boom need unfold the tip mass in space, first, the electric control panel send a signal to release the stowage locker, and then, electronic expansion also is released. Nitrogen in high-pressure vessel flows through inlet control valve, which can slow down gas pressure, and enters a closed film chamber of the coiled boom. Since the inflation pressure is greater than the resistance required for the Velcros layers outside the wall to separate, two pair of Velcros are peeled off and the deploying part of the boom expands in volume. The stowage part with the tip mass moves forward, while the internal static pressure is reduced; then, the overpressure further increases which leads to the gradual separation process of Velcro, and the deployable boom is finally unfolded as a straight boom. Internal self-supporting thin shells can form the structure stiffness needed. Here, inflating pressure plays two roles. One is to unfold the coiled boom; another is to eliminate the creases owing to folding edges in the flatted state, and becoming to a circular rather than an oval cross section.
The length of gravity-gradient boom is designed as 3.0 m. Its natural frequency should be above 0.6 Hz with 2.0 kg tip mass, and the magnetic dipole moment be no more than 0.01 A.m2. The diameter of boom at the bottom is 60 mm, and the diameter of the boom on the top is 50 mm. Six composite self-supporting shells on the inner wall are designed to improve the stiffness of the inflatable boom. Its closed chamber material is a 0.024 mm Kapton film. The wall of the boom is a laminated aluminum membrane with a thickness of 0.096 mm. The mass of the inflatable boom is 660 g. Design parameters are shown in Table 1.
2.1 Design and analysis for self-supporting thin shells
Although the design of self-supporting shells in inflatable booms is no longer novel, the literature [9] used steel tape to increase stiffness. However, such steel tapes are not suitable to directly apply, because the magnetic moment will exceed what is the permitted on the satellite. Thus, a fiber-resin-based composite material is designed as a no-magnetic material for self-supporting shells. The design challenge is that the self-supporting shells not only have a bending stiffness as a slender thin-walled beam, but also can be packaged with a small radius of curvature in a small volume. Therefore, the middle layer of the self-supporting shells is designed with a high-strength carbon fibers, and upper and lower layers as flexible aramid fibers. That is to say, the composite material is designed as Vectran/carbon/Vectran fiber (Fig. 2a). The width of the self-supporting shells is 15 mm. The depth is 2 mm and the thickness is 0.36 mm. The six thin shells are evenly distributed on the inner wall of boom. The centre position of thin shell ⑤ and ② (Fig. 2a) is located at 9 and 3 o’clock, and the side of shell ③ has an angle of 38 deg with the centre of shell ②.
A finite-element model (FEM) of 3.0 m long inflatable boom with a 2.0 kg tip mass at the free end was established. Thin shell with four-node quadrilateral elements was used for the six self-supporting thin shells and the laminated aluminum membrane wall. The thickness of Kapton/Al/Kapton wall was 0.098 mm, and its elastic modulus 18.09 GPa, Poisson’s ratio 0.3, and its density 1850 kg/m3. The free end with 2.0 kg tip mass is seen as a rigid body, but modelled with eight-node solid element. The other end is completely fixed. The internal overpressure was assumed as 40 kPa. The natural frequency of the inflatable boom at the equilibrium state was solved by a Block Lanczos method. Finite-element analysis results show that the first-order mode is bending mode shape. When the internal over-pressure level increased from 0 to 40 kPa, the first bending modal frequency of boom with six self-supporting thin shells increased from 1.1051 to 1.1055 Hz (Fig. 3a). For inflatable boom without thin shells strengthen, the first bending modal frequency of boom increased from 0.45522 to 0.45529 Hz (Fig. 3b). The direction along the length of boom is z-direction. Where x and y are perpendicular to z-direction, and the axis of honeycomb blocks as a mandrel is y-direction. The bending natural frequencies in the x–z and y–z plane are almost the same, as the mass distribution of the boom design is symmetrically. The dilations of the cross section of 27.5 mm average radius boom with 20 kPa and 40 kPa overpressure are 0.0072 and 0.0143 mm, compared with original radius, and these increments are 0.26‰ and 0.52‰, respectively. The effect of internal overpressure on structural stiffness is very small compared to the effect of six self-support composite thin shells. Therefore, these self-supporting thin shells may obviously increase the natural frequency of the inflatable boom.

First mode shape with 40 kPa using finite-element analysis (boom with thin shells a without thin shells b)
Ground testing for natural frequency was performed. The inflatable boom was fixed perpendicular to the ground with 2.0 kg mass on top end; a tri-axial acceleration sensor [PCB 356A16, sensitivity 10.2 mV/(m/s2)] was fixed on the top of the boom (Fig. 4). The gas pressure was input at the fixed end cap, and the mass of fluid is negligible. Results showed that the first natural frequency of the inflatable boom with a 2.0 kg tip mass for 40 kPa and 0 kPa was 0.961 Hz and 0.960 Hz. Both finite-element analysis and experimental testing results in Table 2 indicate that initial pressure has no obvious effect on the first natural frequency of the inflatable boom. This is because the self-supporting shells play a major role in the stiffness compare to the stiffness from pressure. The total mass of gas is 3.95 g for boom with 40 kPa pressure, and the ratio of mass of gas compared the total mass of inflatable gravity grade boom is 6 ‰, so that the mass of fluid is negligible.

Testing result for natural frequency
2.2 Stowage design and analysis
One problem with folded design is how to increase the stowage stiffness. First, the top part connected with the tip mass like a dumbbell can be surrounded, to decrease the stress concentration of the folding corner at the O point (Fig. 5a), keeping the most inner turn as a circle. Second, the flat boom can be rolled to be six turns in an Archimedean spiral around the tip mass, and two sides of which can be locked in the V-shape stowage locks. Third, the most outer turn diameter of the stowage is about 185 mm. Each turn can keep no relative slipping. Therefore, based on these three aspects, a pair of honeycomb blocks with a diameter of 105 mm were designed, located on both sides of the tip mass (Fig. 5b). The inner surface can be filled with the top cap of the boom and the tip mass, which is connected with the top cap when the boom is deployed. The material is chosen as a lightweight aluminum honeycomb. If there is no pair of aluminum honeycomb filled in the center, slits easily appear at the first turn corner at the point O when the boom is subjected by periodic dynamic load or an impact force. A prototype of the gravity-gradient boom is shown in Fig. 5c. The design of honeycomb blocks has two functions. On one hand, the boom is flatted and tightly rolled up them as a mandrel according to Archimedes spiral, to avoid minimum damage to structure; on the other hand, they are able to provide system stiffness for stowed boom, and avoid resonance with launch environment.

Global diagram for stowed boom a, a pair of honeycomb blocks b, and a prototype for stowed gravity-gradient boom c
To analyze the vibration characteristic of the stowed boom filled by honeycomb blocks, mass uniform distribution and geometric symmetry in the stowed boom were assumed. A pair of aluminum honeycombs and the inflatable boom were assumed to be elastic body, neglecting structural viscous damping. A coiled continuous stowed boom was discretized into a set of spring–mass elements.
Therefore, the stowed boom was divided into two symmetrical parts M1 and M3 of the same mass. The total mass of the top cap, the top part of boom, and a pair of aluminum honeycomb was denoted as M2. It should be noted that the tip mass is assumed to be rigidly fixed to both stowage lockers on the container, regardless of mass and considering its supporting boundary. In addition, the mass of the tube is 660 g. However, about 100 g of an end cap and a gas entrance are also rigidly fixed on the container, and the mass of them not considered. Therefore, M1 = M3 = 0.25 kg and M2 = 0.16 kg. The folded boom elements M1 and M3 were assumed to be connected to M2 at point O through three springs K0 = 50,000 N/m. A pair of aluminum honeycomb blocks was assumed to use two springs with K1 = 30,000 N/m. Upon without a pair of aluminum honeycomb blocks inside the stowage, K1 becomes zero. Acted with a horizontal force F = F0sin(ωt), the corresponding dynamic model was simplified, as shown in Fig. 6:
where x1, x2, and x3 are the horizontal displacements of the elements M1,M2, and M3, respectively, which \(\ddot{x}_{1}\), \(\ddot{x}_{2}\), and \(\ddot{x}_{3}\) are the horizontal accelerations. The three single degree-of-freedom systems with the forced vibration problem are calculated by this discontinuous model (Eq. 1). The system frequencies are 71.79 Hz, 107.26 Hz and 168.42 Hz, respectively. Furthermore, we assume F0 = 1 N and ω = 1000 rad/s or ω = 1500 rad/s. The time-domain response of M2 is shown in Fig. 7, results show that if the stowed state is filled the lightweight blocks, the response amplitude of M2 decreased about 20%. If the action frequency is increased, the design of the lightweight honeycomb blocks has more effect on the response amplitude.

Discontinuous model of stowage state with a pair of honeycomb blocks

Simulation results with ω = 1000 rad/s (a) and ω = 1500 rad/s (b)
Frequency response function curves on system response in frequency spectrum with and without the honeycomb blocks are plotted in Fig. 8. The simulation results show that the effect of honeycomb on the vibration frequency of the stowage boom is obvious. For the first nature frequency of the system including the honeycomb blocks frequencies is 71.79 Hz, whereas the first nature frequency without the honeycomb blocks is 35.65 Hz.

System response in frequency spectrum
3 Testing on vibration environment
3.1 Random and sine sweep testing excluding honeycomb blocks
The coiled boom without honeycomb blocks inside was endured random vibration test to simulate the launch environment (Fig. 8) in random and sine sweep vibration. The random vibration test was conducted on a vibration machine and exposed the boom to vibrations in vertical axis (11.03 g RMS, 10–2000 Hz.). The tests indicated a visual damage at the o point to the coiled boom (Fig. 5b) and no degradation in each turn connection between Velcro strips. In this paper, to show that an improved design of honeycomb blocks added have a significant contribution to the natural frequency. The natural frequencies are 37.5 Hz in random vibration (Fig. 9) and 35.16 Hz (Fig. 10) in sine sweep vibration, respectively. These first natural frequencies were smaller than the design requirement to the inflatable boom at the stowage state.

Response spectrums with random vibration

Response spectrums with sine sweep vibration
3.2 Sine sweep testing including honeycomb blocks
Space structures need to be tested with sine sweep vibrations to reduce the risks during the launching. The final purpose is to verify the structural strength of the stowage (Fig. 10) of the inflatable boom and the design feasibility of the aluminum honeycomb blocks. Therefore, the stowage installed on the container was fixed on a 60 kN shaker table in its vertical and horizontal configurations (Fig. 11). The shaker table is characterized between 5 Hz and 2700 Hz by an LMS controller. The stowed boom was placed at left, up right on the outer turn and center position and the front side of the honeycomb block by five acceleration sensors (Fig. 5a). A sine sweep was performed by imposing a control signal at the container basis (Table 3). The x–y horizontal and z vertical measurements of the shaker were taken to get modal and frequency response of the stowed boom and the container. In a sine sweep, frequencies from 5 Hz up to 200 Hz and then from 200 Hz down to 5 Hz were swept by the shaker table (Fig. 12). For excitation using vibration stable, X direction was excited for x responses, Y for y responses, and Z for z responses.

Stowed boom on the shaker table

Settings for target spectrum of sine sweep
Figures 13 and 14 show the x- and y-directional frequency response curves of the sensor at points 1 and 2 by the horizontal measurements, and Fig. 15 shows the vertical directional frequency response curve of the sensors at the same points. These results show that the first natural frequency in the x-direction is 96.32 Hz, in the y-direction 97.44 Hz, and in the z-direction 74.14 Hz (Table 4). The second natural frequency of the stowed boom was about 150 Hz. Results almost keep constant between sweep frequency increase from 5 to 200 Hz and frequency decrease from 200 to 5 Hz, which means that with the help of honeycomb blocks, there is almost no obvious relative slide between each turn of stowed boom. In Fig. 14, there is a step on the curves around 97 Hz along y-direction, which is the axis of honeycomb blocks as a mandrel. The flatted boom was tightly rolled as design of Archimedes spiral. Each turn of stowed boom was connected with a pair of Velcro strips. However, the contact force and friction force distribute unevenly due to some creases during rolling process, and the width of Velcro strip is 15 mm. Therefore, the anti-shear force between some loops and hooks is smaller than the force from vibration direction, and small slide easily occurred.

x-directional frequency response curve at sensor points 1 and 2

y-directional frequency response curve at sensor points 1 and 2

z-directional frequency response curve at sensor points 1 and 2
The response of stowed boom without and with honeycomb blocks in sine sweep testing shows that the first natural frequency increased from 35.16 Hz (Fig. 10) to 74.14 Hz (Fig. 15). Moreover, the analysis results also show that the first nature frequency of the system including the honeycomb blocks is 71.79 Hz, whereas the first nature frequency without the honeycomb blocks is 35.65 Hz. These results show that the effect of honeycomb on the vibration frequency of the stowage boom is obvious.
4 Inflation testing in space
A 3.0 m-long inflatable gravity-gradient boom was manufactured and a 2.0 kg tip mass was stowed on the container according this design to be installed on the New Technology verifying Satellite 1 design by China Academy of Space Technology. The XY-1 satellite was launched by Long March 2C launch vehicle with a passenger, Environment satellite 1C, in November 2012. After storage for about 6 months on the condition of an overpressure about 1 standard atmosphere in space. On 28th May 2013, the stowed boom deployed the tip mass 3.0 m from the satellite by the inflation pressure method. The inflation deployment took approximately 1 min (Table 5). The deployment of inflatable gravity-gradient boom was monitored by a COMS camera (pixels: 320 × 256). These pictures in space show the deployable deformation and the straight inflatable boom as a self-supporting beam. Moreover, the boom with these self-supporting shells kept straight carrying the tip mass for more than 2 years. The mission of inflatable gravity-gradient boom was finished in space until August 2017.
Here, the deployment direction of the inflatable boom on the satellite was defined as z-direction to which xy plane is normal. The original moments of inertia of the satellite before the deployment were \(I_{x} =\) 15.31644 kg m2, \(I_{y} =\) 15.82954 kg m2, and \(I_{z} =\) 7.99367 kg m2. When the 2.0 kg tip mass was unfolded 3.0 m away, the satellite shafted the centre of mass in the z-direction by 56.833 mm, giving new moments of inertia of 40.82479, 40.79483, and 8.02931 kg m2, respectively (Table 6). There is a bit of excursions in x-direction, the centroid coordinate in x-direction changed from 320.630 to 321.789 mm, the difference is about 0.361% due to storage for 6 months. There are no excursions in y-direction, and the centroid coordinate along y-direction still kept − 5.940 mm. The results show that the tip mass was unfolded fully by the inflatable boom with six supporting thin shells. In addition, this also demonstrates the feasibility of using lightweight inflatable booms with low-stowage volume for space mission applications.
5 Summary
A slender inflatable boom with six self-supporting no-magnetic thin shells was presented and a precise stowage was designed for a tip mass surrounded by a pair of honeycomb blocks on the top of the boom to increase the stiffness and strength. The important conclusions reported in this paper are given as follows:
- (1)
The finite-element analysis and testing on the inflatable cantilever boom with a tip mass show that six self-supporting no-magnetic thin shells designed on the wall of boom have main contribution to the overall stiffness.
- (2)
The effect of the natural frequency of stowed boom added a pair of honeycomb blocks, as a mandrel on the vibration is obvious. The wall of inflatable boom is not damaged during three kinds of sine sweep vibrations.
- (3)
Deployable booms with self-supporting thin shells in coiled-stowage are feasible using inflatable method for space mission applications.
References
Greschik, G., Mikulas, M.M.: Design study of a square solar sail architecture. J. Spacecr. Rockets 39, 653–661 (2002)
Wei, J., Yu, L., Jiang, Y., Tan, H., Zhang. J.: Dynamics testing and simulation of inflatable deployable membrane antennas. In; VIII international conference on textile composites and inflatable structures, structural membranes 2017, Munich, Germany (2017)
Freeland, R.E., Bilyeu, G.D., Veal, G.R., Steiner, M.D., Carson, D.E.: Large inflatable deployable antenna flight experiment results. Acta Astronaut. 41(4), 267–277 (1997)
Block, J., Straubel, M., Wiedemann, M.: Ultralight deployable booms for solar sails and other large gossamer structures in space. Acta Astronaut. 68, 984–992 (2011)
Wei, J., Tan, H., Wang, W., Cao, X.: Deployable dynamic analysis and on-orbit experiment for inflatable gravity-gradient boom. Adv. Space Res. 55, 639–646 (2015)
Wei, J., Tan, H., Sun, H., Du, X.: Simulation and experiment for inflatable control deployment of rolled booms. In: 51st AIAA/ASME/ASCE/AHS/ASC structures, structural dynamics and materials conference, Orlando, FL, United states, AIAA-2010-2580 (2010)
Fay, J.P., Steele, C.R.: Forces for rolling and asymmetric pinching of pressurized cylindrical tubes. J. Spacecr. Rockets 36(4), 531–535 (1999)
Salama, M., Fang, H., Lou, M.: Resistive deployment of inflatable structures. J. Spacecr. Rockets 39(5), 711–716 (2002)
Fang, H., Lou, M., Hah, J.: Deployment study of a self-rigidizable inflatable boom. J. Spacecr. Rockets 43(1), 25–30 (2006)
Jenkins, C.H.M.: Deployment control mechanisms and packaging methodologies for inflatable and membrane space structures. gossamer spacecraft: membrane and inflatable structures technology for space applications. Prog. Astronaut. Aeronaut. 191, 417–431 (2001)
Lichodziejewski, D., Veal, G., Helms, R., Freeland, R., Kruer, M.: Inflatable rigidizable solar array for small satellites. In: 44th AIAA/ASME/ASCE/AHS structures, structural dynamics, and materials confere, 7–10 April 2003, Norfolk, Virginia: AIAA-2003-1898 (2003)
Black, J.T., Cobb, R.G., Swenson, E.D., Cooper, B.J.: Rigidizable inflatable get-away-special experiment space flight data analysis. J. Spacecr. Rockets 48(3), 477–487 (2011)
Lou, M., Fang, H., Hsia, L.: Self-rigidizable space inflatable boom. J. Spacecr. Rockets 39(5), 682–690 (2002)
Sun, L., Zhao, G., Huang, H., Zhang, N.: Attitude tracking control of gravity gradient microsatellite in maneuvering for space exploration. Microgravity Sci. Technol. 30, 1011–1020 (2018)
Acknowledgements
This work was supported by China Academy of Space Technology and Aerospace Dongfanghong Development Ltd. Shenzhen, China. Thanks X. Cao, Y. Wang, and S. Zhang for the in-space testing. In addition, we also thank CSC Scholarship. The work was partially performed when the first author was a visiting researcher at KTH Mechanics, Stockholm, Sweden.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wei, J., Yu, J., Tan, H. et al. Design and testing of inflatable gravity-gradient booms in space. CEAS Space J 12, 33–41 (2020). https://doi.org/10.1007/s12567-019-00256-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-019-00256-w