
Abstract
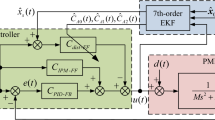
In this paper, an extended Kalman filter is designed and applied to a feed-forward based lumped disturbance compensator which consists of position dependent functions for a permanent magnet linear synchronous motor system. In our previous research, a lumped disturbance model including the force ripple and the Coulomb friction force was developed and utilized as a feed-forward controller. To improve the performance of that model, following two studies are conducted. First, an initial position estimator is designed to create synchronization between the model and real disturbance. This step is necessary because almost all linear motor systems are equipped with an incremental encoder for position measurement. Second, to cancel out a slight variation in real disturbance, an adaptive controller in the form of coefficients adaptation is designed. These two studies are combined by a sixth order extended Kalman filter. To make a comparison, a recursive least squares filter and disturbance observer and its modified version are prepared. The effectiveness of the proposed scheme is verified by the overall disturbance shape, RMS position error and FFT analysis on the position error.
Similar content being viewed by others


References
B. Amstrong, P. Dupont, and C. C. D. WIT, “A survey of models, analysis tools and compensation methods for the control of machines with friction,” Automatica, vol. 30, pp. 1083–1138, 1994. [click]
J. Kim, K. Cho, H. Jung, and S. Choi, “A novel method on disturbance analysis and feed-forward compensation in permanent magnet linear motor system,” Proc. IEEE Fifth Int. Conf. Intell. Syst. Modeling Simulation, pp. 394–399, 2014.
H. Jang, The Ccompensation of Torque Ripple of Brushless DC Motor using Feedforward Method, Master thesis, KAIST, Korean, 2006.
L. Bascetta, P. Rocco, and G. Magnani, “Force ripple compensation in linear motors based on closed-loop positiondependent identification,” IEEE/ASME Trans. Mechatronics, vol. 15, no. 3, pp. 349–359, 2010. [click]
S. Chen, K. K. Tan, S. Huang, and C. S. Teo, “Modeling and compensation of ripples and friction in permanentmagnet linear motor using a hysteretic relay,” IEEE/ASME Trans. Mechatronics, vol. 15, no. 4, pp. 586–594, 2010. [click]
S. Zhao and K. K. Tan, “Adaptive feedforward compensation of force ripples in linear motors,” Control Eng. Practice vol. 13, no. 9, pp. 1081–1092, 2005. [click]
K. K. Tan, T. H. Lee, H. Dou, and S. Zhao, “Force ripple suppression in iron-core permanent magnet linear motors using an adaptive dither,” J. Franklin Inst., vol. 341, no. 4, pp. 375–390, 2004. [click]
K. K. Tan, S. N. Huang, and T. H. Lee, “Robust adaptive numerical compensation for friction and force ripple in permanent-magnet linear motors,” IEEE Trans. Magn., vol. 38, no. 1, pp. 221–228, 2002. [click]
Y. Zhu, S. Jin, K. Chung, and Y. Cho, “Control-based reduction of detent force for permanent magnet linear synchronous motor,” IEEE Trans. Magn., vol. 45, no. 6, pp. 2827–2830, 2009. [click]
W. Su and C. Liaw, “Adaptive positioning control for a LPMSM drive based on adapted inverse model and robust disturbance observer,” IEEE Trans. Power Electron., vol. 21, no. 2, pp. 505–517, 2006. [click]
M. Yan and Y. Shiu, “Theory and application of a combined feedback-feedforward control and disturbance observer in linear motor drive wire-EDM machines,” Int. J. Mach. Tools Manuf., vol. 48, pp. 388–401, 2008. [click]
M. Yan, K. Huang, Y. Shiu, and Y. Chen, “Disturbance observer and adaptive controller design for a linear-motordriven table system,” Int. J. Adv. Manuf. Technol., vol. 35, pp. 408–415, 2007. [click]
C. Rohrig and A. Jochheim, “Identification and compensation of force ripple in linear permanent magnet motors,” Proc. Amer. Control Conf., pp. 2161–2166, 2001.
H. Stearns, S. Mishra, and M. Tomizuka, “Iterative tuning of feedforward controller with force ripple compensation for wafer stage,” Proc. IEEE Int. Workshop Adv. Motion Control, pp. 234–239, 2008. [click]
Y. Zhu, D. Koo, and Y. Cho, “Detent force minimization of permanent magnet linear synchronous motor by means of two different methods,” IEEE Trans. Magn., vol. 44, no. 11, pp. 4345–4348, 2008. [click]
K. K. Tan, T. H. Lee, H. F. Dou, S. J. Chin, and S. Zhao, “Precision motion control with disturbance observer for pulsewidth-modulated-driven permanent-magnet linear motors,” IEEE Trans. Magn., vol. 39, no. 3, pp. 1813–1818, 2003. [click]
E. A. Wan and R. v. d. Merwe, “The unscented Kalman filter for nonlinear estimation,” Proc. IEEE Symp. Adaptive Syst. Signal Process., Commun. Control., pp. 153–158, 2000.
M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Trans. Signal Process., vol. 50, no. 2, pp. 174–188, 2002. [click]
B. Liu and I. Hoteit, “Nonlinear Bayesian mode filtering,” Int. J. Innovative Comput., Inf. Control, vol. 11, no. 1, pp. 231–245, 2015.
F. Daum, “Nonlinear filters: beyond the Kalman filter,” IEEE Trans. Aerosp. Electron. Syst. Mag., vol. 20, no. 8, pp. 57–69, 2005.
M. A. Janaideh and A. H. EL-Shaer, “Performance enhancement for a class of hysteresis nonlinearities using disturbance observers,” International Journal of Control, Automation, and Systems, vol. 12, no. 2, pp. 283–293, 2014. [click]
M. Chen and B. Jiang, “Robust attitude control of near space vehicles with time-varying disturbances,” International Journal of Control, Automation, and Systems, vol. 11, no. 1, pp. 182–187, 2013. [click]
J. Seok, W. Yoo, and S. Won, “Inertia-related coupling torque compensator for disturbance observer based position control of robotic manipulators,” International Journal of Control, Automation, and Systems, vol. 10, no. 4, pp. 753–760, 2012. [click]
X. Chen, J. Li, J. Yang, and S. Li, “A disturbance observer enhanced composite cascade control with experimental studies,” International Journal of Control, Automation, and Systems, vol. 11, no. 3, pp. 555–562, 2013. [click]
K. Kong and M. Tomizuka, “Nominal model manipulation for enhancement of stability robustness for disturbance observer-based control systems,” International Journal of Control, Automation, and Systems, vol. 11, no. 1, pp. 12–20, 2013. [click]
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Xiaojie Su under the direction of Editor Yoshito Ohta. This research was supported by the MSIP (Ministry of Science, ICT&Future Planning), Korea, under the CITRC (Convergence Information Technology Research Center) support program (NIPA-2014-H0401-14-1001) supervised by the NIPA (National IT Industry Promotion Agency) and the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP) (No.2010-0028680).
Jonghwa Kim received his B.S. degree in materials engineering from Hokkaido University, Sapporo, Japan, the M.S. degree in mechanical engineering from the Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea, in 2009. His research interests include control theory and its application.
Kwanghyun Cho received his B.S. degree in electrical engineering form Kyungpook National University, Daegu, Korea, his M.S.and Ph.D. degrees in mechanical engineering from the Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea, in 2014. His research interests include high precision motion control.
Seibum Choi received his B.S. degree in mechanical engineering from Seoul National University, Seoul, Korea, an M.S. degree in mechanical engineering from the Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea, and a Ph.D. degree in control from the University of California, Berkeley, CA, USA, in 1993. His research interests include vehicle dynamics and control and fuel-saving technology.
Rights and permissions
About this article

Cite this article
Kim, J., Cho, K. & Choi, S. Lumped disturbance compensation using extended Kalman filter for permanent magnet linear motor system. Int. J. Control Autom. Syst. 14, 1244–1253 (2016). https://doi.org/10.1007/s12555-014-0400-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-014-0400-1