
Abstract
In this study, a multi-objective optimization is performed for the design of a spindle-bearing system based on particle swarm optimization (PSO). Multiple objectives, such as natural frequencies, static stiffness, and total friction torque are considered in this design optimization. Bearing preload and bearing locations are selected as the design variables. Pareto-optimal solutions are used to support the selection of optimal values of the design parameters. A finite element model is established for the analysis and design of the spindle system with four angular contact ball bearings. Two optimization processes are performed with the PSO technique. The first process involves the first two natural frequencies and friction torque of the spindle, whereas the second process focuses on the spindle’s static stiffness and friction torque. The simulation results show noticeable improvement in the objectives compared with those of the primitive spindle. The experiments conducted on an actual spindle system fabricated with the optimal design demonstrate the benefits of the optimal design. The proposed design method is expected to be very useful in the design optimization of machine tool spindle systems subjected to various customer-oriented objectives.













Similar content being viewed by others

Abbreviations
- N p :
-
Number of particles in the swarm
- X :
-
Position vector of all the particles, i.e., design variables
- Xmax, Xmin :
-
Upper and lower bound vectors
- V :
-
Displacement vector
- i :
-
Particle number
- n :
-
Iteration number
- W :
-
Weighting parameter or particle inertia
- r0, r1, r2, r3 :
-
Vectors of independent random numbers between 0 and 1
- P :
-
Local best location for a particle
- G best :
-
Global best location of all particles in the swarm
- cp, cs :
-
Acceleration constants
- f1, f2 :
-
Objective functions
- N1, N2 :
-
First and second natural frequencies
- T :
-
Friction torque of the rolling bearing
- j :
-
Bearing index
- Z :
-
Total number of bearings
- K :
-
Static stiffness of the spindle
References
Li, H. Q., & Shin, Y. C. (2004). Analysis of bearing configuration effects on high speed spindles using an integrated dynamic thermo-mechanical spindle model. International Journal of Machine Tools and Manufacture, 44(4), 347–364.
Wang, W. R., & Chang, C. N. (1994). Dynamic analysis and design of a machine tool spindle-bearing system. Journal of Vibration and Acoustics, 116(3), 280–285.
Cao, Y. H., & Altintas, Y. (2007). Modeling of spindle-bearing and machine tool systems for virtual simulation of milling operations. International Journal of Machine Tools and Manufacture, 47, 1342–1350.
Gagnol, V., Bouzgarrou, B. C., Ray, P., et al. (2007). Dynamic analyses and design optimization of high-speed spindle-bearing system. In S. Tichkiewitch, et al. (Eds.), Advances in integrated design and manufacturing in mechanical engineering II (pp. 505–518). Dordrecht: Springer.
Shuzi, Y. (1981). A study of the static stiffness of machine tool spindles. International Journal of Machine Tool Design and Research, 21(1), 23–40.
Lin, C. W., & Tu, J. F. (2007). Model-based design of motorized spindle systems to improve dynamic performance at high speeds. Journal of Manufacturing Processes, 9(2), 94–108.
Al-Shareef and Bradon. (1990). On the effects of variations in the design parameters on the dynamic performance of machine tool spindle-bearing systems. International Journal of Machine Tools and Manufacture, 30(3), 431–445.
Wang, K. W., Shin, Y. C., & Chen, C. H. (1991). On the natural frequencies of high-speed spindles with angular contact bearings. Journal of Mechanical Engineering Science, 205(3), 147–154.
Cao, Y., & Altintas, Y. (2005). A general method for the modeling of spindle-bearing systems. Journal of Mechanical Design, 126(6), 1089–1104.
Jiang, S., & Mao, H. (2010). Investigation of variable optimum preload for a machine tool spindle. International Journal of Machine Tools and Manufacture, 50(1), 19–28.
Tong, V. C., & Hong, S. W. (2016). The effect of angular misalignment on the running torques of tapered roller bearings. Tribology International, 95, 76–85.
Maeda, O., Cao, Y., & Altintas, Y. (2005). Expert spindle design system. International Journal of Machine Tools and Manufacture, 45, 537–548.
Gagnol, V., Bouzgarrou, B. C., Ray, P., et al. (2006). Stability-based spindle design optimization. Journal of Manufacturing Science and Engineering, 129(2), 407–415.
Srinivasan, S., Maslen, E. H., & Barrett, L. E. (1997). Optimization of bearing locations for rotor systems with magnetic bearings. Journal of Engineering for Gas Turbines and Power, 119(2), 464–468.
Liang, Y., Chen, W., Sun, Y., et al. (2014). An expert system for hydro/aero-static spindle design used in ultra-precision machine tool. Robotics and Computer-Integrated Manufacturing, 30(2), 107–113.
Lin, C. W. (2012). Simultaneous optimal design of parameters and tolerance of bearing locations for high-speed machine tools using a genetic algorithm and Monte Carlo simulation method. International Journal of Precision Engineering and Manufacturing, 13(11), 1983–1988.
Lin, C. W. (2014). Optimization of bearing locations for maximizing first mode natural frequency of motorized spindle-bearing systems using a genetic algorithm. Applied Mathematics, 5(14), 2137–2152.
Lee, D. S., & Choi, D. H. (2000). Reduced weight design of a flexible rotor with ball bearing stiffness characteristics varying with rotational speed and load. Journal of Vibration and Acoustics, 122(3), 203–208.
Jiang, S., & Zheng, S. (2010). Dynamic design of a high-speed motorized spindle-bearing system. Journal of Mechanical Design, 132(3), 034501.
Taylor, S., Khoo, D. B., & Walton, D. (1990). Microcomputer optimization of machine tool spindle stiffnesses. International Journal of Machine Tools and Manufacture, 30(1), 151–159.
Liu, J., & Chen, X. (2014). Dynamic design for motorized spindles based on an integrated model. The International Journal of Advanced Manufacturing Technology, 71(9–12), 1961–1974.
Liu, G., Hong, J., Wu, W., & Sun, Y. (2018). Investigation on the influence of interference fit on the static and dynamic characteristics of spindle system. International Journal of Advanced Manufacturing Technology, 99(5–8), 1953–1966.
Stephenson, D. A., & Agapiou, J. S. (2016). Metal cutting theory and practice. Florida: CRC Press.
Hwang, Y., & Lee, C. (2010). A review on the preload technology of the rolling bearing for the spindle of machine tools. International Journal of Precision Engineering and Manufacturing, 11(3), 491–498.
Wu, Y., & Zhang, L. (2020). Intelligent motorized spindle technology. Singapore: Springer.
Zhang, L., Gong, W., Zhang, K., et al. (2018). Thermal deformation prediction of high-speed motorized spindle based on biogeography optimization algorithm. The International Journal of Advanced Manufacturing Technology, 97, 3141–3151.
Eberhart, R. C., & Kennedy, J. (1995). A new optimizer using particle swarm theory. In Proceedings of the 6th international symposium on micro machine and human science institute of electrical and electronics engineers, Piscataway, NJ, pp. 39–43.
Liu, Z., Zhu, C., Zhu, P., & Chen, W. (2018). Reliability-based design optimization of composite battery box based on modified particle swarm optimization algorithm. Composite Structures, 204, 239–255.
Chan, C. W. (2015). Modified particle swarm optimization algorithm for multi-objective optimization design of hybrid journal bearings. Journal of Tribology, 137(2), 021101.
Venter, G., & Sobieszczanski-Sobieski, J. (2003). Particle swarm optimization. AIAA Journal, 41(8), 1583–1589.
Bravo, R. H., & Flocker, F. W. (2011). Optimizing cam profiles using the particle swarm technique. Journal of Mechanical Design, 133(9), 091003.
Tong, V. C., & Hong, S. W. (2017). The effect of angular misalignment on the stiffness characteristics of tapered roller bearings. Journal of Mechanical Engineering Science, 231(4), 712–727.
SKF Group (2008). SKF general catalogue 6000/I EN, SKF Group.
Wang, X., Shi, L., Huang, W., & Wang, X. (2018). A multi-objective optimization approach on spiral grooves for gas mechanical seals. Journal of Tribology, 140(4), 041701.
Li, H., & Zhang, Q. (2009). Multiobjective optimization problems with complicated Pareto sets, MOEA/D and NSGA-II. IEEE Transactions on Evolutionary Computation, 13(2), 284–302.
Zhang, J., Fang, B., Zhu, Y., et al. (2017). A comparative study and stiffness analysis of angular contact ball bearings under different preload mechanisms. Mechanism and Machine Theory, 115, 1–17.
Cao, R. H., Holkup, T., & Altintas, Y. (2011). A comparative study on the dynamic s of high-speed spindles with respect to different preload mechanisms. The International Journal of Advanced Manufacturing Technology, 57, 871–883.
Hong, S. W., & Tong, V. C. (2016). Rolling-element bearing modeling: A review. International Journal of Precision Engineering and Manufacturing, 17(12), 1729–1749.
Acknowledgements
This work was supported by the Industrial Core Technology Development Program funded by the Korea Ministry of Trade, Industry and Energy (MOTIE) (No. 10052978).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Computation of Objective Functions
Appendix: Computation of Objective Functions
1.1 A1. Bearing Friction Torque
The friction torque model proposed by SKF is used [33]. The total friction torque of an angular contact ball bearing (ACBB) is the sum of four different sources as follows:
where \( M_{rr} ,M_{sl} ,M_{drag} \), and \( M_{seal} \) represent the rolling, sliding, drag, and seal friction torque components, respectively. As the seal friction torque \( M_{seal} \) is not affected by either the bearing position or the preload, it is ignored. The details of the remaining friction torque components are briefly described below.
1.2 A1.1 Rolling Friction Torque
The rolling friction torque can be calculated by:
where \( \phi_{ish} \) and \( \phi_{rs} \) are the inlet shear heating factor and the kinematic replenishment factor, respectively:
where R1, R2, and R3 are the geometry constants for the rolling friction torque; R1 = 5.03 × 10−7, R2 = 1.97, and R3 = 1.9 × 10−12. D and d denote the outer and inner diameters of the bearing, respectively. The bearing mean diameter dm is calculated by:
Fr and Fa represent the external radial and axial load of the bearing, respectively. n and υ indicate the bearing rotating speed and kinematic viscosity of lubricant at the operating temperature, respectively. Krs and Kz are the replenishment/starvation constant and the bearing type related geometry constant, respectively. For the current ACBBs and spindle system, Krs = 3 × 10−8 and Kz = − 4.4.
1.3 A1.2 Sliding Friction Torque
The sliding friction torque can be calculated by:
where S1, S2, and S3 are the geometry constants for the sliding friction torque; S1 = 1.3 × 10−2, S2 = 0.68, and S3 = 1.9 × 10−12. μsl is the sliding friction coefficient, which is calculated by:
where μbl is the sliding friction coefficient; μbl = 0.15. μEHL is the friction coefficient in the full film conditions; μEHL = 0.04. The weighting factor for the sliding friction torque ϕbl is estimated by:
1.4 A1.3 Drag Friction Torque
The drag friction torque of an ACBB with the oil bath lubrication method can be calculated by:
where VM is the parameter depending on oil level. Kball is a ball bearing constant, calculated by:
where irw indicates the number of ball rows of bearing; irw = 1. For the ACBB lubricated with oil jet lubrication, the drag loss with above-mentioned oil bath method can be used with the oil level equal to half of the ball diameter, and multiplying the obtained Mdrag by a factor of two [33].
1.5 A2. Spindle System Natural Frequency
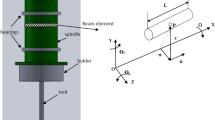
The spindle shaft is modelled by Timoshenko beam method, which considers bending and shearing effects [32]. The shaft is divided into a number of finite elements and the supported ACBBs are supposed to be located at the nodes (Fig. 14). The equation of motion for a shaft element can be written, by neglecting the internal damping of shaft, as follows:
where \( m^{s} \) and \( g^{s} \) represent the [4 × 4] mass and gyroscopic matrices of the shaft element, respectively. \( \left\{ {y^{s} } \right\} \) and \( \left\{ {z^{s} } \right\} \) indicate the [4 × 1] displacement vectors in xOy and xOz planes. The equation of motion for an ACBB is represented as:
where \( \left\{ {\begin{array}{*{20}c} {f_{y}^{b} } & {f_{z}^{b} } \\ \end{array} } \right\}^{T} \) is the force vector of the ACBB. \( k_{yy}^{b} \), \( k_{yz}^{b} \), \( k_{zy}^{b} \), and \( k_{zz}^{b} \) are the [2 × 2] stiffness matrix of the bearing [32]. By combining the equations of all the shaft elements and the ACBBs, the equation of motion for the whole spindle system is derived as

FE model of spindle-ACBB system
Equation (29) can be described, in a state-space form, as:
where
The eigenvalue problem associated with the state-space form equation can be written as
where α and {h} represent the eigenvalue and the corresponding eigenvector, respectively. From Eq. (35), the natural frequencies are determined from the imaginary parts of the eigenvalues.
1.6 A3. Spindle Static Stiffness
For the static condition of the spindle system, the first two terms in Eq. (29) are vanished. Therefore, the displacement vector of all the nodes {q} can be calculated using the following static relationship:
where {f} is the load vector of the spindle-bearing system. In this study, because the static stiffness at the spindle nose position is considered, only a vertical radial load P is applied at the spindle nose (Fig. 14). Accordingly, the load vector {f} contains only one non-zero element of P at the nose node, whereas the other elements of {f} are all zeros. Having obtained the displacement vector {q} for all the nodes, the displacement of the spindle nose can be easily extracted and denoted as qn. The spindle static stiffness, estimated at the spindle nose is finally calculated, as follows:
Rights and permissions
About this article

Cite this article
Tong, VC., Hwang, J., Shim, J. et al. Multi-objective Optimization of Machine Tool Spindle-Bearing System. Int. J. Precis. Eng. Manuf. 21, 1885–1902 (2020). https://doi.org/10.1007/s12541-020-00389-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-020-00389-7