
Abstract
The Sermo Reservoir is located in Kulon Progo District, Special Region of Yogyakarta, Indonesia. It plays a vital role in providing water to its surrounding communities. According to the geological structure of this area, a fault exists near the Ngrancah River and passes through the reservoir’s inundation. At present, a network consists of 15 Global Navigation Satellite System (GNSS) monitoring stations spread around the Sermo Fault to monitor its deformation. However, this network was designed without consideration of geological parameters. This study aimed to design an optimal deformation monitoring network of the Sermo Fault by taking into account geological information and evaluate the existing network, specifically, the optimal distance for the station to the fault plane. Geological surveys were carried out to obtain information regarding the type and characteristics of the fault. This information was used as one of the parameters in the optimization design, using sensitivity criteria, of a network to monitor for the optimal distance between the observation station and fault. Using the strike-slip fault model, the optimal distance obtained was from 4.5 to 8.5 km from the fault plane. The existing stations of the Sermo Fault deformation monitoring network are about 0.07–3.3 km away from the fault. Therefore, the network is insufficiently sensitive and needs to be developed by adding stations that are more than 4.5 km away from the fault. This study designed an alternative network by rearranging the stations’ location to obtain a better configuration and sensitivity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
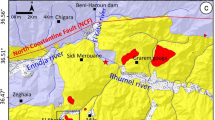
The Sermo Reservoir is located in Kulon Progo District, Special Region of Yogyakarta, Indonesia. It plays a vital role in the supply of water to the surrounding community. The reservoir was built by damming the Ngrancah River. According to the main report of Sermo Reservoir Project Detailed Design Work (Departemen Pekerjaan Umum 1985), the geological structure around the Sermo Reservoir consists of the main fault, oriented northwest-southeast (NW-SE), passing through the Ngrancah River in the inundation area. This is seen clearly in the overlaying of SRTM and geological map of 1:100.000 scale (Rahardjo et al. 2012)(Fig. 1). The figure shows the fault, henceforth referred to as the Sermo Fault, passing through the inundation area of the Sermo Reservoir (Yulaikhah et al. 2019; Yulaikhah et al. 2020). Based on the lineament trend analysis using SRTM, the fault is predicted at the NW-SE direction. The presence of lineaments in all rock formations, including the youngest one (Quarternary alluvium), indicates that the fault is probably active (Yulaikhah et al. 2020). Yulaikhah (2021) conducted GPS campaigns between 2016 and 2018 and showed that almost all Sermo Fault monitoring stations were displaced southeastward. The eastern part of the fault moved faster than the western one. It indicated that this fault is a horizontal or right strike-slip fault.

Overlaying of SRTM and geological map of 1:100.000 scale (Rahardjo et al. 2012). The solid black line indicates the fault extracted from the geological map, while the dotted red one was predicted based on the topographic relief on the SRTM
In humid areas, such as in the Sermo Reservoir, faults can be buried by thick sediments or have thick soil developed along and across them. For this reason, their geomorphic expressions are subdued and can be undetectable (Marliyani et al. 2016). This condition may also be found in the Sermo Fault. Nevertheless, the presence of the Sermo Fault can potentially increase seismic activities in the surrounding area. Reservoir impoundment may lead to changes in stress and pore pressure, influencing earthquake occurrence in the region (Gahalaut and Gahalaut 2010; Gahalaut and Hassoup 2012). Furthermore, this fault could also potentially affect the deformation of the dam body (Siyahi and Arslan 2008).
Deformation monitoring of the Sermo Fault was conducted in 2015 through the establishment of a GNSS network. Currently, there are 15 stations spread around Sermo Fault (Waljiyanto et al. 2016; Yulaikhah et al. 2017). However, this GNSS network took geometrics into account as the primary design factor while disregarding geological parameters, especially the fault’s characteristics.
A geodetic network is designed, generally, to meet accuracy, reliability, and cost-efficiency expectations (Alizadeh-Khameneh et al. 2015; Mehrabi and Voosoghi 2014). For a deformation monitoring network, however, another criterion that has to be met is sensitivity to occurring deformation (Benzao and Shaorong 1995; Even-Tzur2002).
This study aimed to design an optimal deformation monitoring network of the Sermo Fault by taking into account geological parameters such as the model or type of fault. These parameters were obtained from the geological survey. The optimum distance between stations and the fault plane was determined by network optimization design using sensitivity criteria developed by Even-Tzur(2002). Furthermore, we evaluated the existing Sermo Fault monitoring network by comparing the existing distance of the stations to the fault with the optimum ones.
Method
Geology survey of the Sermo Fault
The Sermo Fault is a northwest-southeast trending fault from the central part of the Kulon Progo Mountains across the Sermo Reservoir toward the Wates lowland area. The northwestern tip of the fault is limited by the central part of Mount Ijo, which is on the southern side of the Kulon Progo Mountains. Mount Ijo is about 5 km from the main reservoir to the northwest and as the central facies of the Ijo Oligo-Miocene volcanic body. In this section, the Sermo Fault is in the remnant morphology of the Ijo volcano. Toward the southeast, this fault develops on the volcanic mountain remnant morphology of Mount Ijo and continues on the hilly limestone morphology in the southeast. The Sermo Fault forms a hilly groove and an NW-SE lineament trend that is easily recognizable from topographic maps. The distribution pattern formed by this fault shows a young river stage, indicated by dominant vertical erosion. This vertical erosion has resulted in narrow and deep river valleys that develop from volcanic rocks to limestone.
The northwestern end of the Sermo Fault develops in andesitic lava rocks and andesite breccia in the proximal/close facies of Ijo Tertiary volcanic body (Widagdo et al. 2018a). This volcanic rock is part of the Old Andesite Formation (Van Bemmelen 1949) or the Kebobutak Formation (Rahardjo et al. 2012) and has an age of late Oligocene to Early Miocene. This close facies of volcanic rock shows a high density of fault lineament (Widagdo et al. 2018b). Around the Sermo Reservoir, this fault cuts off quartz sandstone layers –black/gray claystones and coal, which are part of the Nanggulan Formation, which is older than the Eocene Old Andesite Formation. Around the body of the Sermo dam, this fault cuts the andesite breccia of the medial facies from the Ijo Tertiary volcanic (Widagdo et al. 2018a). This andesite breccia is part of the Old Andesite Formation, which is from the late Oligocene to the Early Miocene. In the southeast, this fault cuts the limestone of the Sentolo Formation that is Middle-Late Miocene to Pliocene (Rahardjo et al. 2012). Because of the Sermo Fault cuts Eocene-aged quartz sandstones, Oligo-Miocene volcanic rocks and Late Miocene limestone, thus the age motion of this fault is post-upper Miocene.
Traces of fault movement in the field are indicated by the presence of striations in the fault plane at the field in the Sermo Fault zone (Fig. 2). Several locations in the following table (Table 1) measured the fault plane and the type of fault formed. The strike angle is the angle of the direction of the fault relative to the north, while the dip is the slope of the fault field toward the horizontal plane. Pitch is the angle formed between the striation and strike on the fault plane (Fig. 2). The type of fault movement is determined through visual observation of striations in the field. In addition to the fault plane, joint and veint were also found in this fault zone (Widagdo et al. 2017).

Fault plane at andesite breccia near Sermo dam showing striation with 6° facing to the southeast of pitch and right movement (image taken at coordinates 7°49′32.44″S; 110° 7′22.11″E)
The step structures are also observed in the fault plane which show the direction of movement of the rock blocks on the right and left of the fault plane. Measurements of several faults in the field showed that the Sermo Fault movement indicated a right-lateral strike-slip or dextral-type fault. With a northwest-southeast fault line, the rock block in the northeast moves relatively southeastward compared to the rock block in the southwest.
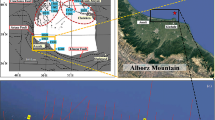
The stereographic analysis of Sermo Fault striation data shows that the maximum stress (σ1) forming this fault originates from the north-northwest. This main stress direction comes from the zone of the main fault movement in the Kulon Progo Mountains. Based on the analysis, the medium stress (σ2) formed is relatively vertical. Thus, maximum-stress and least-stress styles (σ1 and σ3) will be formed in a relatively horizontal direction. The fault formed from this stress pattern is a dextral or right-lateral strike-slip fault, at least on Plio-Pleistocene(Fig. 3). The cross-section along the A-B line in the southwest-northeast section of the Sermo Fault zone is also presented in Fig. 3.

Field data locations and stress analysis of the Sermo Fault from striation data (strike, dip, and pitch)
Optimization design formulation
Even-Tzur (2002) developed a GNSS network design for deformation monitoring based on sensitivity criteria. To obtain the sensitivity of the GNSS network, Even-Tzur(2002) used the F distribution asymmetrical level parameter (λ). The λ parameter is determined by Eq. (1):
where P is weight matrix, A is design matrix, Δt is the time difference between two epochs,\( {\upsigma}_{\boldsymbol{o}}^{\mathbf{2}} \) is a priori variance factor, and Vx is deformation velocity.
The value of λ in Eq. (1) is compared to the boundary value, λo, obtained from the table using variable 1-β, significance level α, and degree of freedom r(Baarda 1968). If λ > λo, it can be concluded that the network is sensitive to the occurring deformation. On the contrary, if λ < λo, the network is considered not sensitive. Thus, it can be found that to obtain a sensitive network, the value of λ needs to exceed the λo. This prerequisite can be used as a constraint on the optimization design as in Eqs. (2) to (4):
where i = 1, 2, 3, …., n.
The geological survey described in the “Geology survey of the Sermo Fault” shows that the Sermo Fault movement is a right-lateral strike-slip fault or dextral fault. Therefore, our network design optimization for monitoring the Sermo Fault deformation uses a strike-slip fault model. In this model, the fault is locked from the surface down to depth D km. Below this depth, the fault slips freely at V mm per year. The velocity parallel to the fault at x km can be computed using Eq. (5) (Gerasimenko et al. 2000):
where x is the distance perpendicular to the fault. Vx in Eq. (4) can be determined using Eq. (5), and a is obtained from Eq. (5) which is derived with respect to x:
The design of both the geodetic and deformation monitoring network needs to consider the cost. The higher the accuracy requested, the higher the cost. Therefore, the most important criterion in network design is the cost requirement. Generally, it is expected that the cost of a survey can be minimized, and thus, the cost criterion for design optimization can be illustrated as in Eq. (7):
The weight of observation is represented by p, and the coefficient relating to cost is c. The costs considered here are those for building the geodetic monument, transportation to access the station location, etc. However, due to the relatively similar accessibility of areas surrounding the Sermo Fault, the value of c for each location does not vary. Therefore, it can be ignored.
When measurements are considered to be uncorrelated, the weight matrix P can be expressed as the inverse of the observation variance matrix (∑l), as in Eq. (8) or (9) (Ghilani 2010; Mikhail and Gracie 1981):
or
If the expected observation accuracy is slb, and \( {\sigma}_o^2=1 \), the maximum weight in this design is obtained from Eq. (10):
To avoid the negative value of p, the constraint equation can be formulated as Eq. (11):
Based on the constraints as elaborated above, the problems regarding network design for deformation monitoring can eventually be reformulated to the following optimization problem as Eqs. (12) and (13):
This problem can be solved with linear programming. The output is the optimum weight (p) value of each measurement. The zero optimum weight (pi = 0) means that the measurement does not contribute to network sensitivity, and thus, it can be ignored from the survey scenario design for deformation monitoring. In contrast, the optimum weight, which is more than zero or close to 1, indicates that the measurement does contribute to network sensitivity.
Results and discussion
In determining the optimum distance to the Sermo Fault using Eq. (12), input data were needed, including the perpendicular distance between the station and the fault (x), depth (D), slip rate (V), and the expected observation accuracy slb. In the current research, the distance of the station was simulated as far as 0.5 up to 10 km, with intervals of 0.5 km. The depth, D, in the strike-slip fault model (Eq. (5)) was assumed to be 10 km. At this depth, there is a change (transition) in fault rocks from cataclasites (brittle) to mylonites (plastic) and in wear mechanisms from abrasion to adhesion (Scholz 2002). However, there is no initial information about the slip rate, so we simulated various slip rates in this study, i.e., 20, 25, and 30 mm/year. With the expected observation accuracy at 1 mm, the optimum weight for each monitoring station can be seen in Table 2 and Fig. 4. As shown in Fig. 4, assuming V = 20 mm/year, monitoring stations of more than 4 km distance contributed to the sensitivity of the network. For V = 25 mm/year, monitoring stations contributed to the sensitivity if the distance was between 6.5 and 8.5 km; while for V = 30 mm/year, the optimum distance was between 7 and 8 km. Using precision criteria (precision of V and D) as constraint functions in network design optimization resulted in insignificant differences in findings, in which the monitoring point was recommended to be installed at a distance of 7–8 km (Gerasimenko et al. 2000). Similar findings were also obtained from monitoring the Tuzla Fault in Turkey. The location of the optimal station was D/3 distance to the fault. In the case of the Tuzla Fault, monitoring stations were installed at distances of approximately 7 km from the fault; several stations were at a distance of 20 km. Stations were distributed on both sides of the fault, and some were close together. This was due to the fact that the structure of the Tuzla Fault is complex, consisting of several faults with different characteristics (Halicioglu and Ozener 2008).

Optimum weight based on the distance between station and fault
The Sermo Fault deformation monitoring network was built in 2015 and comprised 15 monitoring stations. The distribution of the stations is shown in Fig. 5. The stations were installed along the faults, on both sides, and at varying distances from the faults. The initial design of the Sermo Fault deformation monitoring network aimed to determine fault movement and to find out whether the presence of the reservoir influences such movement. Therefore, stations MI17, MI19, MI24, and BMS2 were placed around the reservoir and quite close to the fault area. Other stations were installed some distance away from the reservoir. Such design did not consider parameters such as fault characteristics and sensitivity factors. The graph in Fig. 6 shows the obtained optimum distances and the perpendicular distance of the existing monitoring stations to the Sermo Fault. The figure clearly shows that all stations are located at distances of <4.5 km, and in the range of 0.07 to 3.3 km. The farthest station, MAK3, is only 3.3 km away from the fault plane, while the optimum stations contributing to the sensitivity of the network should be located at a distance of approximately 4.5 to 8.5 km. At that distance, the stations in the Sermo Fault monitoring network did not contribute significantly to network sensitivity. It can be said that the sensitivity of the network is not sufficient, thereby warranting additional stations located more than 4.5 km away. A similar case occurred in the deformation monitoring network at the Kaligarang Fault in Semarang. The monitoring stations were not far enough from the fault, so the GNSS observations did not reflect the fault characteristics. Therefore, additional stations were designed to be located at longer distances from the fault (Fathullah et al. 2015).

Distribution of deformation monitoring stations of the Sermo Fault

The distances perpendicular to the existing monitoring stations to the Sermo Fault. The red bars are the optimum distances resulted from network design using a slip rate of 20, 25, 30 mm/year, respectively
Network sensitivity is affected by distance variations of the stations to the fault. A network with various distances results in a better configuration and is more sensitive than one with homogeneous distances (Yulaikhah 2021). Wu et al. (2003) indicated that the angles of the triangle composed by GPS stations should be greater than 30° and less than 130°. By considering the results of those studies, an alternative to developing the network for monitoring the Sermo Fault deformation can be seen in Fig. 7. The stations were designed at longer and varied distances, forming an angle that is neither acute nor obtuse. In the field, the fixed location can be moved slightly according to the field conditions.

An alternative network design for monitoring the Sermo Fault deformation
Conclusion
The striation measurement of the fault plane in the field indicated that the Sermo Fault movement is of the right-lateral strike-slip or dextral-type fault on Plio-Pleistocene, but according to the lineament trend, this fault is an active one. The Sermo Fault line is oriented northwest-southeast. This geological information was then applied as one of the parameters in a network design optimization to determine the optimum distance between the monitoring station and fault based on sensitivity criteria. The results of the design optimization showed that the optimum monitoring distance is 4.5 to 8.5 km away from the fault.
The deformation monitoring network of the Sermo Fault consists of 15 monitoring stations that were built in 2015. The purpose of establishing the network was to observe fault movement and to determine whether the presence of the reservoir affects the fault movement. Therefore, some of the monitoring stations were planted around the reservoir so that the distance between the stations and the fault was around 0.07–3.3 km. At that distance, the stations in the Sermo Fault deformation monitoring network did not contribute significantly to network sensitivity. It can be concluded that the sensitivity of this network is not sufficient, and thus, the network needs to be developed by adding stations that are located ≥4.5 km away from the fault plane. The distances should be varied, and the triangle composed by stations should be greater than 30° and less than 130°, so the network has a good configuration. An alternative network is designed by rearranging the stations’ location to obtain a better configuration and sensitivity.
References
Alizadeh-Khameneh MA, Eshagh M, Sjöberg LE (2015) Optimisation of Lilla Edet Landslide GPS monitoring network. Journal of Geodetic Science 5(1):57–66. https://doi.org/10.1515/jogs-2015-0005
Baarda W (1968) A testing procedure for use in geodetic networks. Publications on Geodesy (New Series, Vol. 2). Netherlands Geodetic Commission: Publ Geodesy
Benzao T, Shaorong Z (1995) Optimal design of monitoring networks with prior deformation information. Surv Rev 33(258):231–246. https://doi.org/10.1179/sre.1995.33.258.231
Departemen Pekerjaan Umum (1985) Laporan Utama Pekerjaan Disain Detil Proyek Bendungan Sermo. Yogyakarta
Even-Tzur G (2002) GPS vector configuration design for monitoring deformation networks. J Geod 76(8):455–461. https://doi.org/10.1007/s00190-002-0274-5
Fathullah A, Awaluddin M, Haniah (2015) Pengamatan deformasi sesar kaligarang dengan GPS tahun 2015. Jurnal Geodesi Undip 4(4):42
Gahalaut K, Gahalaut VK (2010) Effect of the Zipingpu Reservoir impoundment on the occurrence of the 2008 Wenchuan earthquake and local seismicity. Geophys J Int 183:277–285. https://doi.org/10.1111/j.1365-246X.2010.04715.x
Gahalaut K, Hassoup A (2012) Role of fluids in the earthquake occurrence around Aswan Reservoir, Egypt. J Geophys Res 117(August 2011):1–13. https://doi.org/10.1029/2011JB008796
Gerasimenko MD, Shestakov NV, Kato T (2000) On optimal geodetic network design for fault-mechanics studies. Earth Planets Space 52(11):985–987. https://doi.org/10.1186/BF03352317
Ghilani CD (2010) Adjustment computation spatial data analysis (Fifth). John Wiley & Son, Inc., New Jersey
Halicioglu K, Ozener H (2008) Geodetic network design and optimization on the active Tuzla Fault (Izmir, Turkey) for disaster management. Sensors 8(8):4742–4757. https://doi.org/10.3390/s8084742
Marliyani GI, Arrowsmith JR, Whipple KX (2016) Characterization of slow slip rate faults in humid areas: Cimandiri Fault Zone, Indonesia. J Geophys Res Earth Surf 121(12):2287–2308. https://doi.org/10.1002/2016JF003846
Mehrabi H, Voosoghi B (2014) Optimal observational planning of local GPS networks : assessing an analytical method. Journal of Geodetic Science 4:87–97. https://doi.org/10.2478/jogs-2014-0005
Mikhail EM, Gracie G (1981) Analysis and adjustment of survey measurements. Van Nostrand Reinhold Company, New York
Rahardjo W, Sukandarrumidi, Rosidi H (2012) Peta geologi lembar yogyakarta skala 1 : 100.000. Pusat Survey Geologi-Badan Geologi-Kementrian Energi dan Sumberdaya Mineral
Scholz CH (2002) The mechanics of earthquakes and faulting. The Mechanics of Earthquakes and Faulting (Second Edi). Cambridge University Press, New York. https://doi.org/10.1017/cbo9780511818516
Siyahi B, Arslan H (2008) Earthquake induced deformation of earth dams. Bull Eng Geol Environ 67(3):397–403. https://doi.org/10.1007/s10064-008-0150-5
Van Bemmelen RW (1949) The geology of Indonesia, Vol. IA, General Geology of Indonesia and Adjacent Archipelago. Government Printing Office, The Hague
Waljiyanto N, Yulaikhah P, Cahyono BK (2016) Mitigasi Bencana Bendungan Sermo melalui Pemantauan Sedimentasi dan Deformasi Menggunakan Teknologi Satelit GPS. Universitas Gadjah Mada, Yogyakarta, Laporan Penelitian
Widagdo A, Pramumijoyo SP, Harijoko A (2017) Rekontruksi Struktur Geologi Daerah Gunung Ijo Di Pegunungan Kulon Progo-Yogyakarta Berdasarkan Sebaran Kekar, Sesar dan Urat Kuarsa. In Seminar Nasional Kebumian Ke-10, Peran Penelitian Ilmu Kebumian dalam Pembangunan Infrastruktur di Indonesia. Grha Sabha Pramana, Yogyakarta: TG FT-UGM.
Widagdo A, Pramumijoyo SP, Harijoko A (2018a)Morphotectono-volcanic of Menoreh-Gajah-Ijo volcanic rock in western side of Yogyakarta-Indonesia. J Geosci Eng Environ Technol 03(03). https://doi.org/10.24273/jgeet.2018.3.3.1715
Widagdo A, Pramumijoyo SP, Harijoko A, Setiyanto A (2018b) Fault lineament control on disaster potentials in Kulon Progo mountain area-Central Java-Indonesia. In International Conference on Disater Management. Padang, Indonesia: Andalas University-Indonesian Disaster Expert Association (IABI)
Wu J, Tang, C, Chen YQ (2003)First-order optimization for GPS crustal deformation monitoring. In Proceedings of the 7th South East Asian Surveying Congress, Hong Kong, China, 3-7 November (pp. 1–11). Retrieved from https://www.researchgate.net/publication/228757510_First-order_Optimization_for_GPS_Crustal_Deformation_Monitoring/citations
Yulaikhah (2021) Analisis Jaring GNSS Pemantauan Deformasi Sesar Sermo dan Pengaruhnya terhadap Waduk Sermo, Kabupaten Kulon Progo. Disertasi, Departemen Teknik Geodesi, Fakultas Teknik, Universitas Gadjah Mada, Daerah Istimewa Yogyakarta
Yulaikhah W, Nugroho N, Cahyono P, Waljiyanto BK, Adi AD, Taftazani MI (2017) The analysis of monitoring control point displacement of Sermo Dam based on the 2015-2016 GNSS data. In Proceeding of the 6th International Symposium on Earth Hazard and Disaster Mitigation (ISEDM) 2016. Institut Teknologi Bandung, Bandung: AIP Conference Proceedings
Yulaikhah, Pramumijoyo S, Widjajanti N (2019) The effect of baseline component correlation on the design of GNSS network configuration for Sermo Reservoir deformation monitoring. Indones J Geogr 51(2):199–205
Yulaikhah, Pramumijoyo S, Widjajanti N (2020) Lineament trend analysis for designing of fault deformation monitoring network in the Sermo Reservoir area, Yogyakarta, Indonesia. Int J AdvSci Eng Inf Technol 10(4):1584–1590
Acknowledgements
The authors would like to express deep gratitude toward the parties who have supported this research, especially the Geodetic Engineering Department, Universitas Gadjah Mada, for the financial support through its research grant. Another appreciation is addressed to Miranty Noor Sulistyawati and other parties whom the researcher cannot name one by one.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Responsible Editor: Amjad Kallel
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yulaikhah, Pramumijoyo, S., Widjajanti, N. et al. Optimal design of the Sermo Fault deformation monitoring network using sensitivity criteria based on geological information. Arab J Geosci 14, 2072 (2021). https://doi.org/10.1007/s12517-021-08411-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12517-021-08411-6