
Abstract
India is the second largest country in the world in terms of population and thus a considerable market for potential future robot applications as well as a location for manufacturing and production. While work has started to explore attitudes towards robots, very little is known about the perceptions of robots in India, particularly of political leaders who have the ability to effect rapid change. The present study administered the 30-item Frankenstein Syndrome Questionnaire to 31 Lok Sabha (Lower House) and Rajya Sabah (Upper House) members of the Indian Parliament (MPs) as well as doctors (n = 94), medical students (n = 493), and engineering students (n = 1104) for comparative purposes. Because no information had been available about the psychometric properties of the scale for use in India, a prior Rasch analysis explored the suitability of the commonly used five-factor model. The five subscales did not possess sufficient reliability, and a more psychometrically robust 26-item two-factor model (positive and negative attitudes) was utilized instead. The results revealed a higher degree of positive attitudes in MPs and doctors as compared to the two student groups. Negative attitudes, on the other hand, were strongest in doctors, followed by students. MPs had significantly less negative views compared to all other comparison groups. This study provides valuable insights into attitudes towards robots in India. In general, MPs appear to have more favourable views than comparison groups in India. A slightly shorter and more parsimonious version of the Frankenstein Syndrome Questionnaire has now also been proposed, with improved psychometric properties.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The rapid technological advances in recent times have resulted in an increase in diversification of the application of robots around the world. In industrial settings, robots are completing dangerous or repetitive jobs. In most cases, the benefits are only visible to people indirectly, such as through products becoming cheaper, higher quality, and manufactured on time [1]. Although many people make contact with increasingly common surgical robots [2], more interactive situations are provided in therapeutic applications. For example, the human-like robot Nao was utilized for its imitation functions to improve learning and motor functioning in children with autism [3]. Other designs were inspired by animals such as the parrot robot KiliRo, which has also been shown to reduce stress in children with autism [4].
Within robotics, the field of social robotics has been receiving increasing attention. A social robot has been defined as “an autonomous or semi-autonomous robot that interacts and communicates with humans by following the behavioral norms expected by the people with whom the robot is intended to interact” (p. 592) [5]. Because of the close nature of human-robot interaction in social robotics, understanding human user perspectives is particularly important. Here, the distinction needs to be made between acceptance and acceptability of robots [6]. While the former refers to the reaction of individuals in response to encountering or interacting with a specific robot, the latter refers to the general attitude that individuals hold irrespective of whether they had been exposed to a robot. Such attitudes could be developed through information obtained from media such as films [7]. While acceptance is useful to explore or fine-tune functionality, morphology, and presentation of the robot, acceptability is more relevant to assess when investigating the use of robots in principle – thus more commonly at the very early stages of robot development. This approach would be more suitable for countries such as India, where adoption of robots is currently lagging behind compared to other countries but where there is much potential for growth [8] so that more widespread use of robots can be anticipated. Given the large population of India, its size of workforce, and potential market for robotics, understanding the attitudes about robots in this country will be beneficial.
One group that is an agent for rapid change are political leaders. Understanding the views of politicians will provide insight into the extent to which adoption of robotic technology may be facilitated or resisted during the process of policy development. The present study thus investigated the acceptability of robots in Members of Parliament (MPs) in India. For that purpose, the Frankenstein Syndrome Questionnaire (FSQ) [9] was chosen, given its breadth of coverage of relevant facets related to positive as well as negative attitudes towards robots. Additionally, much of the recent media exposure in India has been around humanoid robots, such as in popular movies [10], and the focus of the FSQ on humanoid robots thus appeared most adequate for this study. Since most previous work using such robot acceptability scales has been conducted largely in Japan and selected Western countries [6], the present study also serves as a much-needed exploration of such scales in a different cultural context. The acceptability reported by MPs in India were compared to three comparison groups: doctors, medical students, and engineers. Prior to analysis, the psychometric properties of the FSQ were explored using Rasch analysis. The present study thus also serves to lay the foundation for future work exploring robot acceptability in India and psychometric refinement of the scale in general.
2 Methods
2.1 Participants
Participants included 31 members of both Upper and Lower House of the Indian Parliament. Of these, 25 were male and 6 female. In terms of age brackets, 8 participants indicated their age to be between 31 and 45 years, 14 participants were between 46 and 60, and 9 MPs were 61 or above. The Parliament of India is the Republic of India’s supreme legislative body. It is a bicameral legislature made up of three constituents, namely the President of India, the Rajya Sabha (Upper House) and the Lok Sabha (Lower House). Rajya Sabha is also known as Council of States and the Lok Sabha is called the House of the People. The President of India is elected by the members of both houses of parliament and the members of the legislative assemblies of the country’s states and union territories. Out of 245 members of the Rajya Sabha, 233 are elected by the elected members of the state assembly by a single transferable vote, and 12 members are nominated by the President of India. The 543 members of Lok Sabha are elected through general election based on adult suffrage, and two members are nominated by the President of India from the Anglo-Indian community. The members of Lok Sabha serve for five years, and the Rajya Sabha members serve for a period of six years. There are members of 37 political parties in Lok Sabha and 34 in Rajya Sabha. As members of both houses play an important role in the country’s high-level decision making, we investigated the attitudes of Lok Sabha and Rajya Sabha members towards robotics. The respondents in the present sample represented ten different states and nine different political parties.
In addition to the MPs, three samples were collected for comparative purposes and to provide a diverse sample to test the psychometric properties of the scale for use in India. This included a sample of 94 medical doctors specializing in areas including pediatrics, oncology, sexology, and surgery. There were slightly more females in the sample than males, with 42 indicating that they were male (45%) and 51 female (54%). In terms of age, 44 participants were between 18 and 30 years, 33 between 31 and 45, and 16 were between 46 and 60. The other two samples were collected from colleges in Chennai, Namakkal, Coimbatore, Hyderabad, and Delhi. From the Faculties of Medicine, 493 students completed the questionnaire, and 1104 from the Faculties of Engineering. No age information was collected since the vast majority was in the age bracket 18 to 30. In the engineering sample, 824 identified as male and 273 as female. In the medical student sample, 220 indicated that there were male and 268 female.
2.2 Questionnaire
The 30-item FSQ [9] inquires about acceptability of humanoid robots, including expectations and anxiety around the use of robotic technology in the general public. Items are presented with a seven-point Likert scale ranging from 1 (Strongly disagree) to 7 (Strongly agree). In the paper reporting on the original development of the scale [9], the authors had presented a tentative four-factor structure. Since then, several variations of this factor structure have been proposed [6]. The present study tested the suitability of a five-factor structure offered by the authors in a follow-up study [11] as it was deemed to be advantageous in terms of factor interpretability and content coverage. These factors are named General Negative Attitudes Towards Robots (items 11, 12, 14, 16, 17, 20, 21, 24, 27, and 30), General Positive Attitudes Towards Robots (items 2, 5, 6, 10, 15, 18, 19, and 23), Principle Objections to Humanoid Robots (items 1, 9, 22, 26, and 29), Trust in Robot Creators (items 3, 13, 25, and 28), and Interpersonal Fears (items 7 and 8). Item 4 was not included here due to low reliability. Example items include “I would feel uneasy if humanoid robots really had emotions and independent thoughts” (General Negative Attitudes Towards Robots), “Humanoid robots can create new forms of interactions both between humans and between humans and machines” (General Positive Attitudes Towards Robots), “I am afraid that humanoid robots will make us forget what it is like to be human (Principle Objections to Humanoid Robots), “Persons and organizations related to development of humanoid robots are well-meaning” (Trust in Robot Creators), and “People interacting with humanoid robots could sometimes lead to problems in relationships between people” (Interpersonal Fears). Questionnaire items with the assigned factor structure [11] are shown in Table 1.
Given the diversity of the sample with participants having a range of different native languages found in India, the FSQ was presented in its English-language form. English is one of the two languages used in Parliament [12] and also the medium of education in many universities, including the ones where participants were sampled.
2.3 Procedure
The study was conducted from July 2019 to May 2020. MPs were recruited using purposive sample to represent diversity in representation of political parties and states. Members of both Upper and Lower Houses were contacted by following the formal appointment-seeking procedure. First, the secretaries of the members were contacted, with explanation of the study and its objectives. On obtaining acceptance from the MP to take part in the study, the first author visited the MP together with a research assistant and presented the survey. MPs were informed that the study is anonymous, and no personal information other than age and gender was collected. MPs selected a preferred place, according to availability and following appropriate security protocols. The participants were presented with a pencil-and-paper version of the 30-item FSQ and requested to indicate their answers. The collected questionnaires were deposited into a response bag that did not permit identification of individual respondents. Information on other participating MPs was not disclosed to other MPs to ensure confidentiality.
The doctors were recruited from several hospitals in the states of Tamil Nadu, Karnataka, Andhra Pradesh, and Telangana. Using the researchers’ networks, hospital management teams were contacted and informed about the study. After agreement to participate, these management teams then forwarded the invitation to participate to the doctors in the hospital. Potential participants then made contact with the researchers, who made individual appointments based on the doctors’ appointment schedules. Each doctor was contacted in person, received a paper copy of the questionnaire, and returned the completed questionnaire in a box to maintain anonymity.
Both student samples were recruited through the relevant academic and research heads. After the purpose and nature of the study had been explained to the academic and research heads, the study took place on campus. The medical student sample was a convenience sample from third- and fourth-year courses within the program Bachelor of Medicine and Bachelor of Surgery. The engineering students were enrolled in engineering programs with various majors. After consultation with the relevant academic and research heads, questionnaires were distributed to students at the beginning of lectures. To maintain anonymity, completed questionnaires were returned in a sealed carton box kept at the front of the lecture theater.
All participants were required to be individuals born as Indian nationals or to have been residing in India for at least five years. No incentives to participate were provided for either of the participant groups. All parts of the study were approved by the relevant institutional ethics review board.
2.4 Data Analysis
Before conducting analyses to compare group means, a Rasch analysis tested the psychometric robustness of the five subscales. Rasch analysis was chosen due to its advantages over classical test theory approaches such as confirmatory factor analysis [13]. This includes detailed information about item performance as well as the ability to distinguish between the effects of different sources of local dependency between items, such as through the differentiation between shared error variance due to method effects (e.g., common wording or formatting) and due to underlying multi-dimensionality. Rasch analysis thus offered a novel approach to help resolve some of the inconsistencies in the factor structure of the FSQ that have previously been reported in the literature [6].
None of the previous studies had re-scored items, which means that Factors 1 (General Negative Attitudes Towards Robots), 3 (Principle Objections to Humanoid Robots), and 5 (Interpersonal Fears) represent negative attitudes, while Factors 2 (General Positive Attitudes Towards Robots) and 4 (Trust in Robot Creators) represent positive attitudes. Given the lack of a previously proposed higher-order factor structure and the fact that factor scores only exhibited low to moderate correlations with each other [11], our analyses scrutinized the psychometric properties of each subscale separately. This also met the requirements for a unidimensional Rasch model [14]. Given the fact that there were only two items in the subscale Interpersonal Fears, no psychometric analysis could be conducted for that factor.
As fit indices become inflated with sample size, Rasch analysis was not conducted with the full sample but a randomly selected subset of 400, thus meeting the required sample size requirements [15]. Rasch analysis was conducted using the software package RUMM2030 [16]. A likelihood-ratio test (p < .001) confirmed the suitability of the unrestricted partial-credit model [17], which was thus used for the present analyses.
Rasch analysis proceeded in an iterative fashion for each factor separately. A nonsignificant (p > .05, Bonferroni adjusted) chi-square fit statistic for item-trait interaction was considered as an indicator for a satisfactory fit to the Rasch model. Fit residuals for individual items were considered to be adequate if they fell between the range of -2.50 and 2.50 [18].
When an adequate fit had been achieved, dimensionality was tested using the method proposed by Smith [19]. This approach involves comparing person estimates between two clusters of items with high and low loadings on the first principal component of residuals using independent-samples t-tests. If less than 5% of these t-tests are significant and the low bound of confidence interval showing the number of significant tests overlaps with the 5-% cut-off point, unidimensionality is considered to be confirmed. Reliability was estimated using person separation index (PSI), which is interpreted in a similar manner to Cronbach’s alpha [17]. A value of 0.70 indicates adequate reliability, and a value of 0.80 or above indicates that the scale is suitable not only for between-group comparisons but also for within-group analysis such as investigating changes over time. Lastly, final models for each factor were analyzed for differential item functioning (DIF) by available personal factors. In this particular case, the only available common personal factor was gender. Analyses thus ascertained that items function uniformly for males and females, such that probability of endorsing an item is solely dependent on trait level and is not moderated by gender as a variable. Once a satisfactory psychometric solution had been obtained for each factor, group comparisons were conducted with parametric statistics using the software package SPSS v. 27.
3 Results
Rasch analysis of the first factor (General Negative Attitudes Towards Robots) achieved a satisfactory fit straightaway, as indicated by a nonsignificant chi-square value (Table 2). None of the items exhibited any significant or elevated misfit, and there was no evidence against the null hypothesis that the subscale presents a unidimensional solution (Table 2). A PSI value of 0.70 indicated that the subscale can be considered to have suitable reliability. There was also no DIF by gender.
Factor 2 (General Positive Attitudes Towards Robots), in contrast, did not achieve a satisfactory fit at baseline. While the factor was unidimensional, overall misfit was indicated by a significant chi square. Item analysis revealed that this misfit was related to elevated fit residuals for items 6 (“Humanoid robots should perform repetitive and boring routine tasks instead of leaving them to people”) and 18 (“Humanoid robots are a natural product of our civilization”). When these items were removed in the next iteration, chi square became nonsignificant, and the model continued to be unidimensional (Table 2). However, PSI remained a concern. Even though it had increased relative to the initial model for this factor, it was still only 0.66, thus revealing lack of sufficient reliability. As with Factor 1, there was no evidence of DIF by gender.
Factors 3 and 4 were similar to Factor 1 in the sense that a unidimensional fit could be achieved with the initial models (Table 2). For Factor 3, however, a PSI value of 0.54 indicated that the scale was unreliable. PSI for Factor 4 was 0.58 and thus also unreliable. For both factors, there was also no DIF by gender.
Given the fact that none of the four subscales that had been examined exhibited sufficient reliability, together with that fact that a Rasch analysis could not even be conducted for the two-item Factor 5, the subsequent psychometric analyses followed a different approach. Instead of the five-factor solution, which does not appear to be adequate in this case, a two-factor solution was explored. Here, the items from the two positive factors (Factors 2 and 4) were merged together into one. For this solution, item 4 (“Humanoid robots may make us even lazier”) was included. Even though this item did not have sufficient factor loading on Factor 2 in a previous analysis [11], it remains to be tested whether it could function adequately within a larger factor. The second factor to be explored was a negative attitudes factor, which consisted of items from Factors 1, 3, and 5.
Even though it was unidimensional, the overall positive factor consisting of 13 items did not achieve an adequate fit to the Rasch model at baseline (Table 2). Iterative analyses revealed misfit for items 4, 6, and 18. When these were deleted, the final 10-item solution (items 2, 3, 5, 10, 13, 15, 19, 23, 25, and 28) fit the Rasch model and continued to be unidimensional. In addition to that, PSI had increased to 0.74, compared to 0.70 in the initial model. Reliability can thus be considered to be adequate. There was no evidence of DIF by gender.
For the 17-item negative attitudes factor, the initial fit was also unidimensional but did not meet the requirements for the Rasch model. As item 26 (“Technologies needed for the development of humanoid robots belongs to the scientific fields that humans should not study”) exhibited high misfit (5.46), this item was deleted in the subsequent model. This modification resulted in a nonsignificant unidimensional fit (Table 2), and this 16-item solution (items 1, 7, 8, 9, 11, 12, 14, 16, 17, 20, 21, 22, 24, 27, 29, and 30) can thus be considered the final model. Deletion of item 26 had also increased PSI from 0.79 to 0.80, which means that this subscale can now be considered to have sufficient reliability for within-group analyses. Lastly, there was no DIF by gender evident in this subscale, either. The allocation of the items to this two-factor structure is shown in Table 1.
Although the detailed results are not presented here, it needs to be noted that item 4 had also been tried as part of the negative factor, even though this item had not originally been assigned to that factor. When it was included there, it revealed item misfit, thus indicating that this item does not appear to have much in common with either of the two factors.
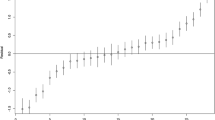
The above analyses indicate that there is little evidence of a five-factor solution. Improved fits could be achieved by grouping items into two subscales of positive and negative items. The fact that the latter solution had superior reliability makes this the preferrable solution for the present comparison of robots between the four samples (MPs, doctors, medical students, and engineering students). The person-item distribution for this solution (Fig. 1) also indicates that the items covered the spectrum of the attitudes very well. Shown on the top panel are the results for the positive attitudes and the bottom panel shows results for the negative attitudes subscale. In both cases, items (shown by the bars pointing downwards) were able to describe the variation of attitudes in respondents (bars pointing upwards) very well. Only at the top end there was a very small number participants (< 1%) for whom the scale could not provide any differentiation.

Person-item distribution plot for the positive attitudes subscale (top panel) and the negative attitudes subscale (bottom panel)
In the absence of a gender effect for the positive (t(1707)=-0.79, p > .05) and negative (t(1706) = 0.64, p > .05) attitudes subscales, gender was not included as a co-variate in the subsequent ANOVA that explored group differences in attitudes. Age could not be included, either, as no age information was available for the student samples. Table 3 shows the means and standard deviations by group for both subscales, as well as post-hoc tests (Tukey) for each specific group comparison. For the positive subscale, the scores of MPs were the highest, followed by those of the doctors, although the means of these two groups were not significantly different. MPs and doctors had significantly higher scores than both student samples. The medical students’ mean score was significantly lower than that of the engineering students. For the negative subscale, the MPs had the lowest mean, and the difference with each other group was significant. The two student samples had no significant difference. The doctors had the highest score on this subscale, with a significant difference with all other comparison groups.
While age could not be used as a co-variate in the overall ANOVA, its effect could be explored in the samples for MPs and doctors. Using Spearman’s rho, there was no significant correlation between the ordinal age categories and the positive attitudes subscale scores (rho = 0.09, p > .05). With the negative attitudes subscale, there was a small positive correlation (rho = 0.24, p < .01). The two subscales were positively correlated, although this correlation was small (Pearson’s r = .29, p < .01).
4 Discussion
The purpose of the present study was to investigate attitudes to robots held by political leaders in India. Responses to the FSQ [9] from a sample of 31 MPs representing a variety of parties and states were compared to three comparison groups in India: doctors, medical students, and engineering students. While these groups are not representative of the Indian population in general, they do provide adequate comparison in terms of social status and education levels. Being current or future professionals in healthcare or engineering, these groups are also representing individuals who will more likely be encountering robots than other people in the general population. Understanding their preparedness to accept robots is thus also beneficial to know in addition to learning about the attitudes towards robots in political leaders.
While the sample of MPs was small (n = 31), efforts were made to capture individuals from a range of different parties and states, as well as Lower and Upper House of the Parliament. As MPs are a hard-to-reach population for survey research such as the present one, it is not surprising that not much previous comparable work has been published. Most of the previous work exploring opinions and views of MPs were related to topics related directly to politics, such as media regulation [20], health research and funding [21], political representation [22], or environmental issues [23]. The only study with a somewhat related topic to the present one was a survey published in 2004 about the attitudes of MPs in Denmark (n = 87) about information technology [24]. Such work is understandably difficult to conduct but provides a valuable mechanism to gauge the attitudes of political leaders about topics important to society.
In our case, the findings indicated that MPs held more favorable views about humanoid robots than the three comparison groups. For the positive attitudes subscales, means of both MPs and doctors were significantly higher than those of the two student groups. For the negative attitudes subscale, MPs had significantly lower scores than all other comparison groups. Interestingly, here the doctors had significantly higher scores than all other groups. This finding that the doctors had high values on both measure of positive and negative attitudes may initially appear like a contradiction. However, the items were not originally developed with the intention of creating two opposites along a continuum [9], and the overall small positive correlation between the two subscales indicates that is certainly not the case. A small positive correlation between positive and negative views on humanoid robots has also been reported previously [11]. Similar attitude ambivalence has been reported in a mixed-methods study investigating participants’ views about a specific robot [7]. It appears, therefore, that individuals can hold both positive as well as negative attitudes towards humanoid robots and that these are not necessarily mutually exclusive.
The finding that medical and engineering students expressed less extreme positive and negative attitudes than the MPs and doctors may contradict some prior expectations. However, this result indicates that one cannot make assumptions about younger people. In a similar vein, much debate debunked the myth that younger generations, or so-called digital natives, have stronger preferences for technology because they have been immersed in it their whole lives as opposed to other generations for whom technology has become more widespread only at a later life stage [25]. While a small correlation between age and negative attitudes was evident within the doctor and MPs samples, this was not the case for positive attitudes. The difference between the results from the students and those of the doctors and MPs may thus be explainable by other factors, such as relevant shared experience. One example may be differences in consumption of media where robots are portrayed in particular ways. In recent years, this includes popular movies in India such as Enthiran [10], which may have had higher exposure in younger people. Future research will need to investigate the effects of media consumption and robot attitudes in more detail.
A particular strength of this study was the fact that statistical comparisons had been preceded by a thorough psychometric analysis of the scale. This psychometric analysis does not only lay the necessary groundwork to enable assessment of robot attitudes in India, but it also provides valuable knowledge about the FSQ [9] in general, for which limited validation work has been published [6]. Using Rasch analysis as an advanced approach to psychometric testing, our work was able to demonstrate that the FSQ can be described through a much simpler structure than originally proposed. Merging the three negative factors into a single negative attitudes subscale and the two positive factors into a single positive attitudes subscale yielded a strong unidimensional solution in both cases, after deletion of four items. This solution is not only more parsimonious and easier to communicate than a four- or five-factor solution [9, 11], but it also possesses superior reliability.
In order to achieve a satisfactory fit for the two-factor solution, the following items had to be discarded: item 4 (“Humanoid robots may make us even lazier”), 6 (“Humanoid robots should perform repetitive and boring routine tasks instead of leaving them to people”), 18 (“Humanoid robots are a natural product of our civilization”), and 26 (“Technologies needed for the development of humanoid robots belongs to the scientific fields that humans should not study”). The first three (items 4, 6, and 18) were originally assigned to a factor assessing a positive attitude, while item 26 belonged to a negative subscale [11]. A follow-on study of the original validation of the FSQ [11], already identified issues with item 4, concluding that it was best not to be included. It appears that this item is ambiguous as it may be interpreted either positively or negatively. For example, one could interpret humans becoming lazier as a sign of getting spoilt or pampered by robots through relief from unwanted work, and this would then essentially be a positive view. On the other hand, laziness could also lead to further consequences and could be seen as a fundamentally negative outcome. However, the item did not work well in either of the subscales, indicating that it is psychometrically ambiguous.
Item 18 might not have functioned because it is simply a statement of fact that could be endorsed irrespective of whether one holds a positive or negative view of robots. For example, seeing robots as a product of human civilization appears to be unrelated to whether one welcomes or fears this development. Item 6 may have been similar in that regard. The question simply asks whether robots should perform repetitive and boring tasks, and this does not appear to imply that the respondent is overall positive about a society with such robots around, which may be another matter. It may also be that the word “should” is ambiguous in this context, which may also be the reason why item 26 did not fit the Rasch model. While there was consistency with previous work in identifying item 4 as problematic [11], future psychometric work will need to confirm the suitability of items 6, 18, and 26 within the FSQ.
To summarize, the present study found that MPs in India appear to hold more favorable views towards robots than the comparison groups of doctors, medical, and engineering students. These finding were informed by a prior Rasch analysis, which provided a thorough investigation of the psychometric properties of the FSQ for use in India. Not only does this enable future work using this scale in India, it also revealed that the previously proposed complex factor structures may not be necessary and that the scale may be more parsimoniously described by a two-factor solution. Lastly, some limitations need to be noted. Apart from the small sample size for the MP sample, a limitation is that the study focused only on the attitudes towards humanoid robots, as this is the focus of the FSQ. Future work is necessary to explore attitudes towards robots more generally, using one of the several other scales that are available [6]. Such work may also include more detailed investigations of demographic variables that may predict acceptability of robots as well as the effect of media exposure related to robots. Whether such attitudes are profound enough to affect individuals’ quality of life or life satisfaction also remains to be explored in more detail [26].
Data Availability
The datasets analyzed during the current study are available from the corresponding author on reasonable request.
References
Karabegović I (2016) The role of industrial robots in the development of automotive industry in China. Int J Eng Works 3(12):92–97
Hockstein NG, Gourin CG, Faust RA, Terris DJ (2007) A history of robots: from science fiction to surgical robotics. J Robot Surg 1(2):3–118. https://doi.org/10.1007/s11701-007-0021-2
Tapus A, Peca A, Aly A, Pop C, Jisa L, Pintea S et al (2012) Children with autism social engagement in interaction with Nao, an imitative robot: A series of single case experiments. Interact Stud 13(3):315–347. https://doi.org/10.1075/is.13.3.01tap
Bharatharaj J, Huang L, Al-Jumaily A, Mohan RE, Krägeloh C (2017) Sociopsychological and physiological effects of a robot-assisted therapy for children with autism. Int J Adv Rob Syst 14(5):1729881417736895. https://doi.org/10.1177/1729881417736895
Bartneck C, Forlizzi J (2004) A design-centred framework for social human-robot interaction. In RO-MAN 2004: 13th IEEE International Workshop on Robot and Human Interactive Communication, September 20–22, 2004, Kurashiki (pp. 591–594). New York: Institute of Electrical and Electronics Engineers. https://doi.org/10.1109/ROMAN.2004.1374827
Krägeloh CU, Bharatharaj J, Kutty SKS, Nirmala PR, Huang L (2019) Questionnaires to measure acceptability of social robots: a critical review. Robotics 8(4):88. https://doi.org/10.3390/robotics8040088
Stapels JG, Eyssel F (2021) Robocalypse? Yes, Please! The Role of Robot Autonomy in the Development of Ambivalent Attitudes Towards Robots. Int J Soc Robot. https://doi.org/10.1007/s12369-020-00640-1
Dhanabalan T, Sathish A (2018) Transforming Indian industries through artificial intelligence and robotics in industry 4.0. Int J Mech Eng Technol 9(10):835–845
Nomura T, Sugimoto K, Syrdal SS, Dautenhahn K (2012) Social acceptance of humanoid robots in Japan: A survey for development of the Frankenstein Syndorome [sic] Questionnaire. In Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, 29 November–1 December 2012; pp. 242–247. https://doi.org/10.1109/HUMANOIDS.2012.6651527
Lakkad AV (2018) Frankenstein’s Avatars: Posthuman Monstrosity in Enthiran/Robot. Rupkatha J Interdisciplinary Stud Humanit 10(2):236–250. https://doi.org/10.21659/rupkatha.v10n2.23
Syrdal DS, Nomura T, Dautenhahn K (2013) The Frankenstein Syndrome Questionnaire–Results from a quantitative cross-cultural survey. In International conference on social robotics (pp. 270–279). Springer, Cham
Parliament of India (retrieved 9 (2021) http://164.100.47.193/Loksabha/Debates/debatelanguage.aspx
Medvedev ON, Krägeloh CU (2022) Rasch measurement model. In: Medvedev ON, Krägeloh CU, Siegert RJ, Singh NN (eds) Handbook of Assessment in Mindfulness Research. Springer, Cham. https://doi.org/10.1007/978-3-030-77644-2_4-1
Rasch G (1960) Probabilistic models for some intelligence and attainment tests. Danish Institute for Educational Research, Copenhagen
Linacre JM (1994) Sample size and item calibration stability. Rasch Meas Trans 7:328
Andrich D, Sheridan B, Luo G (2009) RUMM 2030. RUMM Laboratory, Perth, Australia
Tennant A, Conaghan PG (2007) The Rasch measurement model in rheumatology: what is it and why use it? When should it be applied, and what should one look for in a Rasch paper? Arthritis Rheum 57:1358–1362. https://doi.org/10.1002/art.23108
Balalla SK, Medvedev ON, Siegert RJ, Krägeloh CU (2019) Validation of the WHOQoL-BREF and shorter versions using Rasch analysis in traumatic brain injury and orthopaedic populations. Arch Phys Med Rehabil 100(10):1853–1862. https://doi.org/10.1016/j.apmr.2019.05.029
Smith EV (2002) Detecting and evaluation the impact of multidimensionality using item fit statistics and principal component analysis of residuals. J Appl Meas 3:205–231
Pitts G (2000) Democracy and press freedom in Zambia: Attitudes of members of parliament toward media and media regulation. Commun Law Policy 5(2):269–294. https://doi.org/10.1207/S15326926CLP0502_5
Clark DR, McGrath PJ, MacDonald N (2007) Members’ of Parliament knowledge of and attitudes toward health research and funding. CMAJ 177(9):1045–1051. https://doi.org/10.1503/cmaj.070320
Brack N, Costa O, Pequito Teixeira C (2012) Attitudes towards the focus and style of political representation among Belgian, French and Portuguese parliamentarians. Representation 48(4):387–402. https://doi.org/10.1080/00344893.2012.720884
Worcester RM (1993) Public and élite attitudes to environmental issues. Int J Public Opin Res 5(4):315–334
Hoff J (2004) The democratic potentials of information technology: Attitudes of European MPs towards new technology. Inform Polity 9(1):55–66. https://doi.org/10.3233/IP-2004-0044
Bennett S, Maton K, Kervin L (2008) The ‘digital natives’ debate: A critical review of the evidence. Br J Educ Technol 39(5):775–786. https://doi.org/10.1111/j.1467-8535.2007.00793.x
Hinks T (2021) Fear of Robots and Life Satisfaction. Int J Soc Robot 13(2):327–340. https://doi.org/10.1007/s12369-020-00640-1
Acknowledgements
We thank Dr. J. Sundeep Anand, President, Bharath Institute of Higher Education and Research for his support during the study.
Funding
This research was funded by matching grant funding by Auckland University of Technology and Bharath Institute of Higher Education and Research for establishment of the Psychosocial Aspects in Robotics (PAIR) Lab.
Open Access funding enabled and organized by CAUL and its Member Institutions
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The authors have no conflicts of interest to disclose.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bharatharaj, J., Sasthan Kutty, S.K., Munisamy, A. et al. What do Members of Parliament in India Think of Robots? Validation of the Frankenstein Syndrome Questionnaire and Comparison with Other Population Groups. Int J of Soc Robotics 14, 2009–2018 (2022). https://doi.org/10.1007/s12369-022-00921-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-022-00921-x