
Abstract
There is a growing body of work reporting on experimental work on social robotics (SR) used for persuasive purposes. We report a comprehensive review on persuasive social robotics research with the aim to better inform their design, by summarizing literature on factors impacting their persuasiveness. From 54 papers, we extracted the SR’s design features evaluated in the studies and the evidence of their efficacy. We identified five main categories in the factors that were evaluated: modality, interaction, social character, context and persuasive strategies. Our literature review finds generally consistent effects for factors in modality, interaction and context, whereas more mixed results were shown for social character and persuasive strategies. This review further summarizes findings on interaction effects of multiple factors for the persuasiveness of social robots. Finally, based on the analysis of the papers reviewed, suggestions for factor expression design and evaluation, and the potential for using qualitative methods and more longer-term studies are discussed.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Social robotics (SR) has been identified as robots that are socially evocative, socially receptive, equipped with a social interface or sociable [8]. In contrast to physically assistive robots, SR support their users through social interactions. Thus far, SR have been considered for multiple application areas (e.g., healthcare, education, commercial services [16]) and roles (e.g., servants, assistants, collaborators). For some time now, the field of Human-Robot Interaction (HRI) has studied the persuasive nature of social interactions with robots [70]. More recent research suggests that the act of persuasion is an inseparable component of the interaction between humans and a social robot, similar to human-human interaction (HHI) [74]. Several studies have argued for the benefits of social robot persuasion in creating effective, engaging and meaningful social robotic assistance [25, 37, 74]. Beyond these benefits, understanding social robot persuasion also helps avoiding any ethical and psychological damage from unintentional persuasion effects [74]. To date, persuasion by social robots has been explored and evaluated in a multitude of application scenarios, such as promoting a healthy lifestyle [6, 39], facilitating learning activities [85, 89], and increasing environmental awareness [82] (see Table 4).
Many experimental studies have investigated which and how SR’s design and behaviour can affect their persuasive power towards their human counterparts. A survey study in 2018 reviewed the persuasive effects of non-verbal interaction of SR. The survey provided an overview of, and evaluated non-verbal robot communication design with regards to the robots’ kinesics, proxemics, haptics and chronemics, and evaluated the persuasive effects in their ability to shift cognitive framing, elicit emotional responses, trigger specific behavioural responses, and improve task performance [66]. Another survey from the same year investigated current developments in social robot personality research [62]. While both reviews present an overview of the present, and a vision on future persuasive social robot design, the current scope of experimental work in the field extends beyond non-verbal interaction and personality. In order to reflect on current developments and to support further persuasive SR design, we provide an overview on the body of work regarding persuasive SR research. Specifically, we explore how persuasion through SR has been studied, the persuasive factors that have been evaluated, as well as their effects on persuasiveness.
The topic of persuasion has been extensively studied in HHI, with many theoretical frameworks proposed to understand such processes:, e.g., theory of planned behaviour [3], self-determination theory [64], and the elaboration likelihood model [58]. Similarly, in the domain of human-technology interaction, theories have been developed for eliciting compliance from users [15]. Summarizing, there is a broad theoretical basis on which designers of persuasive technology in general, and social robots specifically, can build their designs. Notwithstanding this theoretical basis, however, researchers are actively exploring the effectiveness of theory-based persuasion techniques in the domain of social robotics. This review attempts to bring together this body of work, with the aim of identifying factors that have been “tried and proven” in the design of persuasive social robotics.
One could challenge the need for studying the psychology of persuasion in HRI, because an extensive body of work already exists on persuasion in the field of HHI. However, HRI is fundamentally different from HHI, since robots lack the ability to be persuaded themselves, and humans’ perception of robots as non-humans influences their attitude and behavior towards the latter. Finally, interaction with social robots concerns a cognitive process of both social interaction and interaction with an artefact [31]. Due to this duality, theories from HHI or HCI are not necessarily sufficient to explain the phenomena surrounding persuasion in HRI and a need to develop, hence the need for theoretical investigation of persuasion specifically in the domain of HRI.

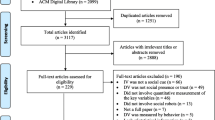
PRISMA flow diagram [53] for the selection of papers reviewed
In the remainder of this paper, we detail the methods we used in collecting and analyzing the body of knowledge that was reviewed in this study. We present a detailed analysis of the reviewed papers that were clustered in five categories. Finally, we discuss the implications of the current paper on future SR research and design.
2 Method
This review focuses on persuasive factors in SR design and their evaluation. The review procedure follows the guidelines proposed by the Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) statement. PRISMA was designed to help systematic reviewers transparently report why the review was done, what the authors did, and what they found [53].The PRISMA statement provides a checklist addressing the introduction, methods, results and discussion sections of a systematic review report, and a flow diagram that depicts the flow of information through the different phases of a systematic review, visualizing the number of records identified, included and excluded (see Fig. 1).
2.1 Search Strategy
A query was conducted on the ACM, IEEE, and Scopus databases on August 19, 2019. The search query used was: ( TITLE ( robo* ) AND TITLE-ABS-KEY ( persua* OR “behaviour change” OR “behavior change” OR coaching OR “behaviour modification” OR “applied behaviour analysis” ) ). The query resulted in 254 papers. After title, abstract and full paper screening (see Fig. 1), we manually added one additional paper that satisfied the inclusion criteria, but that was not found using the search query. 54 papers reporting on a total of 60 studies were included for further analysis according to the criteria listed in Table 1.
Given our aim to summarize the research on social robots persuading human participants, we collected studies that evaluate social robots’ persuasive effects through user studies. Therefore, we included research involving human participants in experiments where the social robot functioned as a social actor in the interaction and mediated the persuasion. We excluded papers that investigated technical aspects of robotic design, such as user adaptation [23], user-related cognition [56], control systems [57], etc. Other papers that were excluded focused on design methodology [14], design cases of robot platforms [60, 61], application issues regarding deployment [59], user perceptions [11, 88], tasks [35, 80], and ethical issues [30].
2.2 Method of Analysis
Data were extracted based on the categories shown in Table 2. The factors evaluated by each study are addressed as persuasive factors in the review. For example, one study evaluated the effect of SR showing politeness on persuasion by comparing participants’ responses to a SR with/without polite cues [32]. For this study, we registered “politeness” as the persuasive factor evaluated. As most persuasive factors by themselves are relatively abstract, the review also extracted a detailed description (factor expression) of how the persuasive factor is portrayed in the actual interaction. For example, in the case of evaluating politeness, researchers used eight different ways for expressing politeness (e.g., showing indirectness, expressing the goal as the subject’s own wish or Socratic hints, etc) [32]. Beyond evaluating individual factors, 25 studies investigated how a social robot’s persuasiveness is influenced by a combination of multiple factors. For example, two studies investigated how either verbal or non-verbal interaction, or a combination of both affected robot persuasiveness, and found that combining both verbal and non-verbal interaction resulted in higher compliance than for each of the factors used individually [6, 10]. These “factor interactions” are presented in a dedicated section, investigating factor interactive effects and potential patterns for factor combinations. Finally, to avoid misinterpretation, terminology used to describe the factors follows the description provided by the authors of the papers we reviewed.
To map the current areas of research on persuasive social robots, the extracted persuasive factors were clustered and organised into five categories through card sorting. Three researchers (first author with two other non-authors, with research backgrounds of design and/or social robotics) were provided with the persuasive factors and their expressions extracted from the studies in this review. The researchers first clustered the factors individually, then integrated their clusters into a commonly agreed structure through discussion. The card sorting analysis was conducted according to the standard procedure proposed by Spencer & Garrett [75]. This analysis identified five categories of factors evaluated in persuasive social robotics research: modality, interaction, social character, persuasive strategies and context.

Papers by publication year
3 Results
3.1 Meta-Data Results
Studies on persuasive social robotic research first emerged in 2005 and started to appear consistently in literature from 2008 (see Fig. 2). Table 3 provides an overview of the methods, experimental settings, sample sizes and application fields for all studies included. Primary locations for conducting persuasive robotic research are the United States (24%), the Netherlands (20%) and Japan (17%). Widely used robotic platforms for these studies are NAO, Pepper, iCat, Socibot and ATR’s robovie-mR2 (see Fig. 3), while Table 5 provides an overview for the studies, year of publication and frequency of use for all included robotic platforms.
To present, most persuasive social robotic research has focused on evaluating factors for persuasiveness outside any particular application area or societal context. Rather, persuasion effectiveness is studied in the context of abstract laboratory tasks such as desert/Mars survival games [46], mundane or repetitive tasks (copying formulas, image recognition) [54, 72] and fictional tasks, such as making a drink for an alien [21]. 64% of the research was done in such an artificial context. while 36% of the studies were situated in a certain application field and scenario of use as shown in Table 4.
Among all the studies extracted from the survey, sessions in which participants had live interactions with a robot are the most prominent way of evaluating persuasive factors. These studies were mostly (87%) done in a lab environment with a Wizard-of-Oz approach, and typically lasted between 30 minutes and two hours. Other study types include field studies (12%) and online surveys (2%). Among the field studies, two particular studies assessed long-term robotic persuasion over the course of six weeks [39] and six months [49].
Studies primarily use quantitative measures for data collection. They mostly collected data regarding compliance (indicated by actual behavior change (an objective act of compliance), or through self-reported persuasion) and theoretical components related to the evaluated persuasive factor. For example, a study evaluating credibility measured (1) participant’s compliance to the robot’s suggestion and (2) trustworthiness of the robot, a factor impacting persuasiveness as indicated by theoretical reference [21]. Qualitative data were collected to interpret the quantitative data and to gain insights [2, 87]. Bio measurements were also incorporated in one study, with respiration rate, heart rate, blinking rate, and skin conductance as indicators for stress level during negotiation with a robot [13].

Most-used social robotic platforms (from left to right: NAO. Pepper, iCat, robovie-mR2, SociBot)
3.2 Evaluated Persuasive Factors
To clearly present the data from the survey, the extracted persuasive factors were clustered and organised into five categories through card sorting analysis. The analysis identified the following five categories of factors addressed in the design of persuasive social robotics research:
-
1.
Modality aspects of the social robotics’ presence.
-
2.
Interaction robotic interactive functionalities.
-
3.
Social Character human or non-human character traits.
-
4.
Persuasive strategy persuasive strategy application in social robots.
-
5.
Context contextual factors impacting persuasiveness of human-robot interaction.
Based on the results presented, the presence of social robots can elicit stronger compliance compared to some other persuasive embodiments like pamphlets, phones and non-social robotics. Studies in section of social robot interactions shows that a more interactive robot that equips various verbal and non-verbal interactive cues, generally gains higher persuasiveness. Several persuasive strategies from the HHI domain like peer pressure, compatibility, foot-in-the-door technique and reciprocity are also found to be applicable in persuasive HRI. Contextual factors like task difficulty, cultural background and social influences have been found to influence participants’ attitude and behaviour. Factors regarding a robot’s social character were widely explored, however results are not aligned. Similarly, several studies confirmed that persuasive factors do interact. However, in part due to the lack of replication studies on some factors combinations, current results are not strong enough to convincingly confirm the interactive effect of particular factor combinations.
With the intent to provide an clearer view for the status of social robotic persuasive research, the sections below show:
-
1.
An overview of the factors evaluated and their effectiveness in eliciting compliance within the section.
-
2.
A table presenting the following information from the reviewed studies: the robotic platform that was used, the factor they evaluated, the means through which the factor was expressed, the measures that were recorded, and the results found.
Comparing the studies, we observed that some authors use different terminology to describe identical factors and use the same terms to describe different factor expressions. For example, two studies both reported on the effect of social speech, however one study varied the presence of the speech function itself (by not using a verbal cue in the control condition) [84], the other one investigated the effect of emotions in speech feedback by comparing emotional speech and emotionless speech between experiment conditions [82]. To disentangle such term collisions, studies were clustered based on the factor expression that was compared between experimental conditions, also with regards to the measurements used in the experiments, to check if they align with the term and expression.
3.2.1 Modality
The studies in the modality category investigated the persuasive effect of the presence of social robot, compared to other forms of persuasive agents (i.e., non-social robots, pamphlets, desktop PC, kiosk, virtual agents and human) (see Table 6). In line with media equation theory [55] and a previous survey study on different types of agent presence [43], the studies in the current survey have provided ample evidence that the presence of SR can lead to positive compliance to persuasive communications. Generally, when compared to other means of persuasion, SR have been shown to have a stronger influence [28, 38, 49, 84, 86]. Findings are mixed, however, when comparing SR to virtual agents [70, 79, 82, 89] or human persuaders [34, 86] (see Fig. 4).
Apart from presence, the SR’s modality design is also discussed. One notable study explored the persuasive effects of SR with a hybrid modality named “docking”. Their specific platform consists of a physical robot and a virtual agent with the same appearance on a handheld device. The handheld device can be docked into the physical robot. When the physical robot is not around, the user can continue interacting with the virtual robot on the portable device. The system used the same agent image across devices and inherited conversational and usage histories to create a more ubiquitous persuasive agent. The study compared the persuasive power of the robot with/without the handheld device [78]. Even though the docking design was not shown to be more persuasive, the study suggests that the research of persuasive SR modalities extends beyond the robot’s presence. With further technology advances, it is important to explore more aspects of social robots’ modality (e.g., form factor, ways of presence) and explore their influence on the persuasiveness of the SR.
3.2.2 Interaction
This section includes research that explores the presence of robotic interactive capabilities like speech, gesture, gaze, etc. Such factors reflect the interactivity of the social robots (see Table 7). Higher levels of interactivity can be achieved by equipping the robot with more interactive cues or by increasing the interactivity of each cue. Generally, robots equipped with interactive cues have been shown to be more persuasive, except for gestures, which only showed marginal effects (see Fig. 5).
3.2.3 Social Character
A number of studies have evaluated the impact of SR’s social characters on persuasiveness. So far, widely explored factors include agency level, sociability, gender, trustworthiness, rapport building, and the robot’s communication styles. Individual studies also investigated the effect of showing politeness, goodwill, acknowledgement, and the robot being a teammate (see Fig. 6 and Table 8).

Summarised results of persuasive effectiveness of social robot modality (numbers indicate the referred study, with colour code to show the general result of the study)

Summarised results of persuasive effectiveness of social robot interaction (numbers indicate the referred study, with colour code to show the general result of the study)

Summarised results of persuasive effectiveness of social robot social character (numbers indicate the referred study, with colour code to show the general result of the study)
As general trends, studies show that higher sociability [27, 28, 52, 84] and providing negative feedback [27,28,29, 52] can lead to higher compliance. Studies also found that robots whispering and touching humans could elicit compliance by building up rapport with the user [54, 72, 73]. Trustworthiness is widely explored with various expressions. Though results have not been replicated, showing facial trustworthiness [21], providing practical knowledge and implementing rhetorical capabilities [4] have been shown to be effective for persuasion.

Summarised results of persuasive effectiveness of social robot persuasive strategies (numbers indicate the referred study, with colour code to show the general result of the study)

Summarised results of persuasive effectiveness of social robot interaction context (numbers indicate the referred study, with colour code to show the general result of the study)
Apart from the above-mentioned factors, some factor combinations also produced mixed results, e.g., the combination of gaze and gesture has both shown no interaction [26] as well as an interactive effect strengthening their persuasiveness [25].

Summarised results of persuasive effectiveness of factor combinations (numbers indicate the referred study, with lines connecting the factors evaluated as a combination in each study)
Agency level refers to the robot’s personality on a scale from machine-like to human-like. This factor was expressed in multiple ways over different studies but was not consistently shown to be effective in persuasion. One study found that higher agency level would lead to higher psychological reactance [22]. A study on gender differences showed that there is a positive cross gender effect on persuasion and that men show more gender related behaviors [74]. However this conclusion was not fully supported by any other experiment on the same factor [81].
3.2.4 Persuasive Strategies
Factors discussed in this section concern persuasive strategies implemented through social robots. Such persuasive strategies derive from research in human-human communication, e.g., in the fields of social psychology or communication studies. The strategies evaluated include peer pressure, regulatory fit, similarity, timing (based on the theory of cognitive dissonance), foot-in-the-door technique, reciprocity and strategies from the CGBs collection (a collection of persuasive verbal messages using the following strategies: affect, authority, cooperative, criticise, deceit, direct, exclusive, liking, logical, threat [50]). Over half of the strategies evaluated were found to have marginal to significant positive effects on participants’ compliance to the robot agent. Though there is a lack of replication studies, these results suggest a promising potential for applying persuasive strategies common in human-human interaction to the field of social robotics (see Fig. 7, Table 9).
3.2.5 Context
This section includes contextual factors that are not directly related to the SR, nor the participants, but are considered relevant to the human-robot interaction and persuasive outcomes (see Fig. 8, Table 10).
Tasks are usually a necessary part of a persuasive HRI evaluation session. The effects of task similarity, task difficulty and task relevance to the user have been investigated. The results show that when the task gets difficult, participants tend to follow the robot’s advice more [1, 76, 77]. Having company during the interaction with a social robot has also been found to be relevant for a participant’s compliance, and the effect varies between genders. In particular, female participants change their behavior when interacting with a persuasive robot when accompanied by another person, in contrast to a situation in which they interact with the robot individually [74]. Finally, cultural background was also found to be a relevant factor in the persuasiveness of SR [48, 65].
3.3 Persuasive Factor Interactions
It is common for a social robot in a human-robot interaction to portray more than one of the factors discussed in the previous section. A numbers of studies evaluated the effects on persuasion of multiple factors implemented simultaneously. Figure 9 presents an overview of the factor combinations evaluated and Table 11 presents further details with each evaluation. Since factors from across the five above sections were combined in the studies, we clustered similar combinations.
Studies generally show that the identified factors interact when combined. Often, factors that are already effective individually would increase their efficacy when combined. Such results have been found repeatedly with the combinations of non-verbal cues and task difficulty [1, 76], and negative and social feedback [27, 28]. Some factors that are not effective individually can still boost the effect of other effective factors when combined, though this effect is not observed in all related studies. While combinations of gaze and task difficulty (effective individually) [77] and whispering gesture (effective individually) and small voice [54, 72] do not show any difference in persuasive effects, the combination of gaze and gesture (effective individually) [25], and high controlling language (effective individually) and social agency level [20], appear to have a stronger effect than individual factors.
4 Discussion
This survey on persuasive social robot research has identified a number of general trends in persuasion by social robot. Overall, persuasion studies involving the presence of a social robot have provided evidence for the persuasiveness of social robots. Social robots tend to be more persuasive with higher levels of interaction gained through deploying verbal and non-verbal cues. Also, contextual factors within human-robot interaction including specific tasks, backgrounds and social dynamics have been shown to be generally effective in eliciting compliance in participants.
While this review shows consistently positive effects on persuasion by factors related to modality, interaction and context, the choices of social character and persuasive strategies implemented in the robot have been found to produce mixed results. As a general, trend such studies are based on and are aimed at testing current theories from HHI or elements thereof. Studies with such intention aim to establish whether theories of human persuasion apply to the context of HRI. To this point, results are mixed, suggesting that HRI can gain from applying methods borrowed from HHI persuasion, but the effects are not the same as for human persuaders. One related insight for this phenomenon was captured within an interview from one of the evaluated studies, where a participant remarks: “it is nice that the robot shows good will, but I’m just not sure if he (the robot) is sincere.” [87]. Other studies have shown that the cognition towards social robots is a complex process [9]. One of the ways for understanding how social robots persuade humans, is through synthesizing related works. As much as the variables were strictly controlled within the studies in this review, the variety of setups, measurements and analyses used amongst the reported experiments on identical factors make it difficult to synthesize this review’s findings into a coherent narrative. Below we discuss ways in which future research can address these limitations.
4.1 Effects of Varied Factor Expressions
The factor expression refers to how a factor manifests itself in a robot’s actions. In general, experiments are designed based on a particular theory (on persuasion) that typically only provides the researchers with an abstract concept of a factor description (e.g., ‘credibility’). However, such abstract descriptions provide ample of room for different implementations (e.g., ‘showing practical knowledge’ [4], ‘citing expert’ [87], ‘using metaphor’ [78], ‘title’ [37], ‘facial characteristics’ [21], etc.). As the varied results have shown, these different implementations themselves might have a significant impact on the persuasive effect. In this review, studies have provided different levels of clarity on how the expression of the factors were designed. Some studies designed the expression based on previous research [7], some base their designs on theory [4], while other studies provide no clear description.
The influence of factor expression is exemplified in a series of experiments which examined whether a robot could elicit behavior change through peer pressure. Three experiments were all based on Asch’s conformity experiment [5] and used similar experimental designs, including their measurements and tasks for participants. The earliest study in the series did not find a significant effect of peer pressure on persuasion [7]. However, the two later studies used different versions of the expression design with synchronized robot behavior [71] and a mixed group of human and robot peers [83], and both found the strategy of peer pressure to be effective in social robot persuasion.
Unlike the above-mentioned case, in most cases the experimental design of studies on similar factors are different from each other (especially the variety in measurements and tasks). Hence, we are unable to compare the effectiveness between different expressions for the same factor. However, the ability to do so is instrumental to discover the efficacy of certain theoretical factors, as well as the most suitable way to express them. For comparing different expressions of the same factor, we suggest the approach from a study on the influence of politeness on persuasiveness [32]. Before evaluating the persuasive effects of the polite robot, the study first investigated the different ways of expressing politeness using eight strategies (e.g., showing indirectness, expressing the goal as the subject’s own wish or Socratic hints, etc). The evaluation of the eight strategies identified expressions that were more successful in expressing politeness, as well as the different levels of clarity in expressing politeness for each expression. Essentially, this approach checks the extent to which the implementation of the factor aligns with the intentions of the researchers (in this case showing politeness). Following this approach could eliminate the potential risk of failing manipulations (e.g., the robot not being perceived as polite). Beyond reducing risk in individual studies, the results of such evaluations can help to compare the designed expression across studies to identify opportunities for optimising the effect of a given factor.
Apart from evaluating the design of factor expressions, a theoretical common ground can also be adopted at an earlier stage when considering the design of factor expressions. For the case of equipping social robots with character traits, psychology research describes that personality is portrayed through someone’s behaviors, cognition and emotions [24]. Different experiments can plan, design and measure the social robot interaction according to the dimensions indicated by such theory, thus resulting in increased comparability.
4.2 Mixed-Methods Research
Within the studies surveyed, the experimental hypotheses were not always supported by the results. Qualitative data can be very useful to provide such explanations. For example, one study hypothesised that a robot showing goodwill in the experiment would increase the robot’s credibility and likability. While the results show the strategy indeed provided a good encouragement, the credibility and likability measures did not correlate with the objective measure of compliance [87]. Though showing goodwill has been shown to be effective in eliciting compliance, the hypothesized explanation for that effect was not proven, and thus the hypothesized mechanism for the factor’s effect remained not validated. However, a follow up interview in the same study revealed that the participants had doubts about the intentions behind the robot’s behaviour, which is an issue that was not covered by the theoretical framework on which the study was based. Similarly, in studies measuring the interactive effects of multiple combined factors, the quantitative measurements used currently can only reflect on the complex phenomenon as a whole, but do not provide a deeper understanding of the mechanism behind such effects.
As illustrated by the above cases, HRI interaction remains a complicated process that extends beyond the realm of HHI and HCI theories that are referenced in the reviewed research. We thus recommend a mixed methods approach, where qualitative research methods can help in gaining a better understanding of how social robots gain persuasive power towards their human counterparts. Furthermore, the current focus on behavioural and self-report data can be complemented with physiological data (e.g. respiration rate, heart rate, blinking rate, and skin conductance). Such data has proven to facilitate a better understanding of effects studied in SR persuasive research [13].
4.3 Long-Term Studies and Field Evaluations
As mentioned in section 3, the majority of experiments reviewed are single session lab experiments, potentially involving the novelty effect that is well known to influence participants in the field of human robot interaction [44]. However, related research has shown that the novelty effect wears off quickly and users show changes in attitude [42]. To produce sustainable social robotic persuasive strategies, future studies should make an effort to address potential novelty effects by (1) planning repeated interaction sessions with the same participants, (2) adding an introduction session before the experiment to familiarise participants with the novel elements.
The preference for lab studies in the reviewed literature bears another risk, where the setting potentially influences participants’ behaviour (generally known as the Hawthorne effect [51]). For example, beyond the presence of experimenters, one of the reviewed studies has shown that having company can also modify participants behaviour for robot persuasion [74]. Given the different context, transferring these results into the field might prove difficult. A series of studies investigating the persuasive effect of whispering cues evaluated the same strategy in the field [54], and further validated the findings in the lab [72]. Such a cross-contextual triangulation can yield better understanding of the design of persuasion robots suitable for a real-world deployment.
4.4 Limitations
In this paper, we have limited ourselves to a review of the ‘tried and proven’. Many of the studies we have reviewed are grounded in theoretical frameworks on persuasion, but are not easily mapped onto a single, overarching perspective grounded in theory. In limiting our work to review these studies, and by grouping them based on design choices, we cannot provide a comprehensive overview of the areas of persuasive design currently under explored by the field. However, we do provide an overview of design choices that have been found to be effective in the field of persuasive SR.
5 Conclusions
We presented a survey on the research performed on persuasive social robotic factors from 2005 to 2019 to inform further persuasive social robotic research and design. From the studies reviewed, we identified and presented current findings of persuasive social robotic research in areas of modality, interaction, social character, persuasive strategies and context. Based on this review, we have found that the presence of a social robot can elicit stronger compliance compared to some other media like pamphlets, phones and non-social robotics. Furthermore, studies on social robot interactions show that a more interactive robot, equipped with a range of verbal and non-verbal interactive cues, generally gains higher persuasiveness. Several persuasive strategies in HHI domain like peer pressure, compatibility, foot-in-the-door technique and reciprocity have been found to be applicable in persuasive HRI. Finally, contextual factors like task difficulty, culture background and social influences are also found to influence participant attitude and behaviour.
Factors regarding a robot’s social character were widely explored but have resulted in less consistent results. Similarly, studies have confirmed that persuasive factors do interact. However, partly due to the lack of replication studies on similar factor combinations, there is as yet not strong enough evidence regarding the interactive effect of combining two or more of these factors.
Finally, based on our review of the studies in the current paper, we wish to draw the attention of researchers to (1) the design and evaluation of persuasive factor expression for optimising the factor’s effect, (2) incorporating qualitative research methods for further results interpretation, and (3) striving for long-term and field evaluations to eliminate novelty and observer effects.
References
Admoni H, Weng T, Hayes B, Scassellati B (2016) Robot nonverbal behavior improves task performance in difficult collaborations. In: ACM/IEEE international conference on human-robot interaction, pp 51–58
Agnihotri A, Knight H (2019) Persuasive ChairBots: a robot recruited experiment. In: ACM/IEEE international conference on human-robot interaction, pp 700–702
Ajzen I (2011) The theory of planned behaviour: reactions and reflections. Psychol Health 26:1113–1127. https://doi.org/10.1080/08870446.2011.613995
Andrist S, Spannan E, Mutlu B (2013) Rhetorical robots: making robots more effective speakers using linguistic cues of expertise. In: ACM/IEEE international conference on human-robot interaction, pp 341–348
Asch R, Solomon E (1951) Effects of group pressure upon the modification and distortion of judgments. In: Groups, leadership, and men, pp 222–236
Baroni I, Nalin M, Zelati MC, Oleari E, Sanna A (2014) Designing motivational robot: how robots might motivate children to eat fruits and vegetables. In: Proceedings of the IEEE international workshop on robot and human interactive communication, pp 796–801
Brandstetter J, Racz P, Beckner C, Sandoval EB, Hay J, Bartneck C (2014) A peer pressure experiment: recreation of the Asch conformity experiment with robots. In: 2014 IEEE/RSJ international conference on intelligent robots and systems, IEEE, Chicago, IL, USA, pp 1335–1340
Breazeal C (2003) Toward sociable robots. Robot Auton Syst 42:167–175. https://doi.org/10.1016/S0921-8890(02)00373-1
Broadbent E (2017) Interactions with robots: the truths we reveal about ourselves. Annu Rev Psychol 68:627–652. https://doi.org/10.1146/annurev-psych-010416-043958
Chidambaram V, Chiang Y-H, Mutlu B (2012) Designing persuasive robots: how robots might persuade people using vocal and nonverbal cues. In: Proceedings of the seventh annual ACM/IEEE international conference on Human-Robot Interaction—HRI ’12. ACM Press, Boston, Massachusetts, USA, p 293
Cohen I, Looije R, Neerincx MA (2014) Child’s perception of robot’s emotions: effects of platform, context and experience. Int J Soc Robot 6:507–518. https://doi.org/10.1007/s12369-014-0230-6
Crowe E, Higgins ET (1997) Regulatory focus and strategic inclinations: promotion and prevention in decision-making. Organ Behav Hum Decis Process 69:117–132. https://doi.org/10.1006/obhd.1996.2675
Cruz-Maya A, Tapus A (2018) Negotiating with a robot: analysis of regulatory focus behavior. In: 2018 IEEE international conference on robotics and automation (ICRA). IEEE, Brisbane, QLD, pp 1–9
Devanne M, Nguyen SM, Remy-Neris O, Le Gals-Garnett B, Kermarrec G, Thepaut A (2018) A co-design approach for a rehabilitation robot coach for physical rehabilitation based on the error classification of motion errors. In: 2018 second IEEE international conference on robotic computing (IRC). IEEE, Laguna Hills, CA, pp 352–357
Fogg B. A behavior model for persuasive design, 7
Fong T, Nourbakhsh I, Dautenhahn K (2003) A survey of socially interactive robots. Robot Auton Syst 42:143–166. https://doi.org/10.1016/S0921-8890(02)00372-X
Geiskkovitch D, Seo S, Young JE (2015) Autonomy, embodiment, and obedience to robots. In: ACM/IEEE international conference on human-robot interaction, pp 235–236
Ghazali AS, Ham J, Barakova E, Markopoulos P (2018) The influence of social cues in persuasive social robots on psychological reactance and compliance. Comput Hum Behav 87:58–65. https://doi.org/10.1016/j.chb.2018.05.016
Ghazali AS, Ham J, Barakova E, Markopoulos P (2019) Assessing the effect of persuasive robots interactive social cues on users’ psychological reactance, liking, trusting beliefs and compliance. Adv Robot. https://doi.org/10.1080/01691864.2019.1589570
Ghazali AS, Ham J, Barakova EI, Markopoulos P (2017) Pardon the rude robot: social cues diminish reactance to high controlling language. In: RO-MAN 2017—26th IEEE international symposium on robot and human interactive communication, pp 411–417
Ghazali AS, Ham J, Barakova EI, Markopoulos P (2018) Effects of robot facial characteristics and gender in persuasive human-robot interaction. Front Robot AI. https://doi.org/10.3389/frobt.2018.00073
Ghazali AS, Ham J, Barakova EI, Markopoulos P (2018) Poker face influence: persuasive robot with minimal social cues triggers less psychological reactance. In: 2018 27th IEEE international symposium on robot and human interactive communication (RO-MAN). IEEE, Nanjing, pp 940–946
Greczek J, Atrash A, Matarić M (2013) A computational model of graded cueing: robots encouraging behavior change. Commun Comput Inf Sci 374:582–586. https://doi.org/10.1007/978-3-642-39476-8_117
Hall CS, Lindzey G, Campbell JB (1998) Theories of personality, 4th edn. Wiley, New York
Ham J, Bokhorst R, Cuijpers R, Van Der Pol D, Cabibihan J-J (2011) Making robots persuasive: the influence of combining persuasive strategies (gazing and gestures) by a storytelling robot on its persuasive power. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 7072 LNAI:71–83. https://doi.org/10.1007/978-3-642-25504-5_8
Ham J, Cuijpers RH, Cabibihan J-J (2015) Combining robotic persuasive strategies: the persuasive power of a storytelling robot that uses gazing and gestures. Int J Soc Robot 7:479–487. https://doi.org/10.1007/s12369-015-0280-4
Ham J, Midden C (2008) A robot that says “bad!”: using negative and positive social feedback from a robotic agent to save energy. In: Proceedings of the 4th ACM/IEEE international conference on human-robot interaction, HRI’09, pp 265–266
Ham J, Midden C (2010) A persuasive robotic agent to save energy: The influence of social feedback, feedback valence and task similarity on energy conservation behavior. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 6414 LNAI:335–344. https://doi.org/10.1007/978-3-642-17248-9_35
Ham J, Midden CJH (2014) A persuasive robot to stimulate energy conservation: the influence of positive and negative social feedback and task similarity on energy-consumption behavior. Int J Soc Robot 6:163–171. https://doi.org/10.1007/s12369-013-0205-z
Ham J, Spahn A (2015) Shall I show you some other shirts too? The psychology and ethics of persuasive robots. Cogn Technol 40:63–81. https://doi.org/10.1007/978-3-319-21548-8_4
Ham J, Van Esch M, Limpens Y, De Pee J, Cabibihan J-J, Ge SS (2012) The automaticity of social behavior towards robots: The influence of cognitive load on interpersonal distance to approachable versus less approachable robots. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 7621 LNAI:15–25. https://doi.org/10.1007/978-3-642-34103-8_2
Hammer S, Lugrin B, Bogomolov S, Janowski K, André E (2016) Investigating politeness strategies and their persuasiveness for a Robotic Elderly Assistant. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 9638:315–326. https://doi.org/10.1007/978-3-319-31510-2_27
Haring KS, Mosley A, Pruznick S, Fleming J, Satterfield K, de Visser EJ, Tossell CC, Funke G (2019) Robot authority in human-machine teams: effects of human-like appearance on compliance. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 11575 LNCS:63–78. https://doi.org/10.1007/978-3-030-21565-1_5
Herse S, Vitale J, Ebrahimian D, Tonkin M, Ojha S, Sidra S, Johnston B, Phillips S, Gudi SLKC, Clark J, Judge W, Williams M-A (2018) Bon appetit! robot persuasion for food recommendation. In: ACM/IEEE international conference on human-robot interaction, pp 125–126
Hoffman G, Zuckerman O, Hirschberger G, Luria M, Shani Sherman T (2015) Design and evaluation of a peripheral robotic conversation companion. In: ACM/IEEE international conference on human-robot interaction, pp 3–10
Johnson LW, Hausknecht DR, Sweeney JC, Soutar GN (1998) “After I had made the decision, I ...” Toward a scale to measure cognitive dissonance. J Consum Satisf Dissatisf Complain Behav 119–127
Jung Y, Park T, Hong A (2014) Effect of robot’s title in human-robot interaction. In: 2014 11th international conference on ubiquitous robots and ambient intelligence, URAI 2014, pp 28–32
Kamei K, Shinozawa K, Ikeda T, Utsumi A, Miyashita T, Hagita N (2010) Recommendation from robots in a real-world retail shop. In: International conference on multimodal interfaces and the workshop on machine learning for multimodal interaction, ICMI-MLMI 2010
Kidd CD, Breazeal C (2008) Robots at home: Understanding long-term human-robot interaction. In: 2008 IEEE/RSJ international conference on intelligent robots and systems, IROS, pp 3230–3235
Lee SA, Liang Y (2016) The role of reciprocity in verbally persuasive robots. Cyberpsychol Behav Soc Netw 19:524–527. https://doi.org/10.1089/cyber.2016.0124
Lee SA, Liang Y (2019) Robotic foot-in-the-door: using sequential-request persuasive strategies in human-robot interaction. Comput Hum Behav 90:351–356. https://doi.org/10.1016/j.chb.2018.08.026
Leite I, Martinho C, Paiva A (2013) Social robots for long-term interaction: a survey. Int J Soc Robot 5:291–308. https://doi.org/10.1007/s12369-013-0178-y
Li J (2015) The benefit of being physically present: a survey of experimental works comparing copresent robots, telepresent robots and virtual agents. Int J Hum Comput Stud 77:23–37. https://doi.org/10.1016/j.ijhcs.2015.01.001
Liu S-H, Liao H-L, Pratt JA (2009) Impact of media richness and flow on e-learning technology acceptance. Comput Educ 52:599–607. https://doi.org/10.1016/j.compedu.2008.11.002
Lopez A, Ccasane B, Paredes R, Cuellar F (2017) Effects of using indirect language by a robot to change human attitudes. In: ACM/IEEE international conference on human-robot interaction, pp 193–194
Lucas GM, Boberg J, Traum D, Artstein R, Gratch J, Gainer A, Johnson E, Leuski A, Nakano M (2017) The role of social dialogue and errors in robots. In: HAI 2017—proceedings of the 5th international conference on human agent interaction, pp 431–433
Lucas GM, Boberg J, Traum D, Artstein R, Gratch J, Gainer A, Johnson E, Leuski A, Nakano M (2018) Getting to know each other: the role of social dialogue in recovery from errors in social robots. In: ACM/IEEE international conference on human-robot interaction, pp 344–351
Makenova R, Karsybayeva R, Sandygulova A (2018) Exploring cross-cultural differences in persuasive robotics. In: ACM/IEEE international conference on human-robot interaction, pp 185–186
Maneeprom N, Taneepanichskul S, Panza A, Suputtitada A (2019) Effectiveness of robotics fall prevention program among elderly in senior housings, Bangkok, Thailand: a quasi-experimental study. Clin Interv Aging 14:335–346. https://doi.org/10.2147/CIA.S182336
Marwell G, Schmitt DR (1967) Dimensions of compliance-gaining behavior: an empirical analysis. Sociometry 30:350. https://doi.org/10.2307/2786181
McCarney R, Warner J, Iliffe S, van Haselen R, Griffin M, Fisher P (2007) The Hawthorne Effect: a randomised, controlled trial. BMC Med Res Methodol. https://doi.org/10.1186/1471-2288-7-30
Midden C, Ham J (2009) Using negative and positive social feedback from a robotic agent to save energy. In: ACM international conference proceeding series
Moher D, Liberati A, Tetzlaff J, Altman DG (2009) Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement. PLoS Med 6:6
Nakagawa K, Shiomi M, Shinozawa K, Matsumura R, Ishiguro H, Hagita N (2013) Effect of robot’s whispering behavior on people’s motivation. Int J Soc Robot 5:5–16. https://doi.org/10.1007/s12369-012-0141-3
Nass C, Moon Y (2000) Machines and mindlessness: social responses to computers. J Soc Issues 56:81–103. https://doi.org/10.1111/0022-4537.00153
Okuno K, Inamura T (2012) A model to output optimal degrees of emphasis for teaching motion according to initial performance of human-learners-an empirically obtained model for robotic motion coaching system. In: 2012 IEEE/SICE international symposium on system integration, SII 2012, pp 916–920
Papageorgiou D, Kastritsi T, Doulgeri Z (2020) A passive robot controller aiding human coaching for kinematic behavior modifications. Robot Comput Integr Manuf. https://doi.org/10.1016/j.rcim.2019.101824
Petty RE (2012) Communication and persuasion: central and peripheral routes to attitude change. Springer, New York
Piasek J, Wieczorowska-Tobis K (2018) Acceptance and long-term use of a social robot by elderly users in a domestic environment. In: Proceedings of the 2018 11th international conference on human system interaction, HSI 2018, pp 478–482
Pistoia M, Pistoia M, Casacci P (2017) ASTRO: Autism support therapy by RObot interaction. Lect Notes Electr Eng 426:303–309. https://doi.org/10.1007/978-3-319-54283-6_23
Rincon JA, Costa A, Novais P, Julian V, Carrascosa C (2018) A new emotional robot assistant that facilitates human interaction and persuasion. Knowl Inf Syst. https://doi.org/10.1007/s10115-018-1231-9
Robert L (2018) Personality in the human robot interaction literature: a review and brief critique. In: Proceedings of the 24th Americas conference on information systems, pp 16–18
Roubroeks MAJ, Ham JRC, Midden CJH (2010) The dominant robot: Threatening robots cause psychological reactance, especially when they have incongruent goals. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 6137 LNCS:174–184. https://doi.org/10.1007/978-3-642-13226-1_18
Ryan RM, Deci EL (2000) Self-determination theory and the facilitation of intrinsic motivation, social development, and well-being. Am Psychol 11
Sanoubari E, Seo SH, Garcha D, Young JE, Loureiro-Rodriguez V (2019) Good robot design or machiavellian? an in-the-wild robot leveraging minimal knowledge of Passersby’s culture. In: ACM/IEEE international conference on human-robot interaction, pp 382–391
Saunderson S, Nejat G (2019) How robots influence humans: a survey of nonverbal communication in social human-robot interaction. Int J Soc Robot 11:575–608. https://doi.org/10.1007/s12369-019-00523-0
Saunderson S, Nejat G (2019) It would make me happy if you used my guess: comparing robot persuasive strategies in social human-robot interaction. IEEE Robot Autom Lett 4:1707–1714. https://doi.org/10.1109/LRA.2019.2897143
Schneider S, Goerlich M, Kummert F (2017) A framework for designing socially assistive robot interactions. Cogn Syst Res 43:301–312. https://doi.org/10.1016/j.cogsys.2016.09.008
Sembroski CE, Fraune MR, Sabanovic S (2017) He said, she said, it said: effects of robot group membership and human authority on people’s willingness to follow their instructions. In: 2017 26th IEEE international symposium on robot and human interactive communication (RO-MAN). IEEE, Lisbon, pp 56–61
Shinozawa K, Naya F, Yamato J, Kogure K (2005) Differences in effect of robot and screen agent recommendations on human decision-making. Int J Hum Comput Stud 62:267–279. https://doi.org/10.1016/j.ijhcs.2004.11.003
Shiomi M, Hagita N (2016) Do synchronized multiple robots exert peer pressure? In: Proceedings of the fourth international conference on human agent interaction—HAI ’16. ACM Press, Biopolis, Singapore, pp 27–33
Shiomi M, Nakagawa K, Matsumura R, Shinozawa K, Ishiguro H, Hagita N (2010) “Could I have a word?”: effects of robot’s whisper. In: IEEE/RSJ 2010 international conference on intelligent robots and systems, IROS 2010—conference proceedings, pp 3899–3904
Shiomi M, Nakagawa K, Shinozawa K, Matsumura R, Ishiguro H, Hagita N (2017) Does a robot’s touch encourage human effort? Int J Soc Robot 9:5–15. https://doi.org/10.1007/s12369-016-0339-x
Siegel M, Breazeal C, Norton MI (2009) Persuasive robotics: the influence of robot gender on human behavior. In: 2009 IEEE/RSJ international conference on intelligent robots and systems. IEEE, St. Louis, MO, USA, pp 2563–2568
Spencer D, Garrett JJ (2009) Card sorting: designing usable categories. Rosenfeld Media, Brooklyn
Stanton C, Stevens CJ (2014) Robot pressure: the impact of robot eye gaze and lifelike bodily movements upon decision-making and trust. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinform 8755:330–339. https://doi.org/10.1007/978-3-319-11973-1_34
Stanton CJ, Stevens CJ (2017) Don’t stare at me: the impact of a humanoid robot’s gaze upon trust during a cooperative human-robot visual task. Int J Soc Robot 9:745–753. https://doi.org/10.1007/s12369-017-0422-y
Sugiyama O, Shinozawa K, Akimoto T, Hagita N (2010) Case study of a multi-robot healthcare system: Effects of docking and metaphor on persuasion. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 6414 LNAI:90–99. https://doi.org/10.1007/978-3-642-17248-9_10
Sumi K, Nagata M (2013) Characteristics of robots and virtual agents as a persuasive talker. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 8010 LNCS:414–423. https://doi.org/10.1007/978-3-642-39191-0_46
Sun S, Obo T, Loo CK, Kubota N (2016) Health promotion using smart device interlocked robot partners for elderly people. In: Proceedings of the 2016 joint 8th international conference on soft computing and intelligent systems and 2016 17th international symposium on advanced intelligent systems, SCIS-ISIS 2016, pp 317–322
Thellman S, Hagman W, Jonsson E, Nilsson L, Samuelsson E, Simonsson C, Skönvall J, Westin A, Silvervarg A (2018) He is not more persuasive than her—no gender biases toward robots giving speeches. In: Proceedings of the 18th international conference on intelligent virtual agents, IVA 2018, pp 327–328
Tussyadiah I, Miller G (2019) Nudged by a robot: responses to agency and feedback. Ann Tour Res. https://doi.org/10.1016/j.annals.2019.102752
Ullrich D, Butz A, Diefenbach S (2018) Who do you follow? Social robots’ impact on human judgment. In: Companion of the 2018 ACM/IEEE international conference on human-robot interaction—HRI ’18. ACM Press, Chicago, IL, USA, pp 265–266
Vossen S, Ham J, Midden C (2010) What makes social feedback from a robot work? Disentangling the effect of speech, physical appearance and evaluation. Lect Notes Comput Sci Subser Lect Notes Artif Intell Lect Notes Bioinforma 6137 LNCS:52–57. https://doi.org/10.1007/978-3-642-13226-1_7
Weiss A, Scherndl T, Buchner R, Tscheligi M (2010) A robot as persuasive social actor a field trial on child-robot interaction. In: Proceedings of the 2nd international symposium on new frontiers in human-robot interaction—a symposium at the AISB 2010 convention, pp 136–142
Williams K, Flores JA, Peters J (2014) Affective robot influence on driver adherence to safety, cognitive load reduction and sociability. In: AutomotiveUI 2014—6th international conference on automotive user interfaces and interactive vehicular applications, in cooperation with ACM SIGCHI—proceedings
Winkle K, Lemaignan S, Caleb-Solly P, Leonards U, Turton A, Bremner P (2019) Effective persuasion strategies for socially assistive robots. In: ACM/IEEE international conference on human-robot interaction, pp 277–285
Wu Y-H, Wrobel J, Cornuet M, Kerhervé H, Damnée S, Rrigaud A-S (2014) Acceptance of an assistive robot in older adults: a mixed-method study of human-robot interaction over a 1-month period in the living lab setting. Clin Interv Aging 9:801–811. https://doi.org/10.2147/CIA.S56435
Youssef K, Boukadida W, Okada M (2017) ROBOMO: effects of a motivational intervention to Adress the Barriers during science learning. In: IEEE CIT 2017—17th IEEE international conference on computer and information technology, pp 47–54
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Data availability
The authors declare that the data supporting the findings of this study are available within the article and its supplementary information files.
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1: Tables
Appendix 1: Tables
See Tables 6, 7, 8, 9, 10 and 11.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, B., Tetteroo, D. & Markopoulos, P. A Systematic Review of Experimental Work on Persuasive Social Robots. Int J of Soc Robotics 14, 1339–1378 (2022). https://doi.org/10.1007/s12369-022-00870-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-022-00870-5