
Abstract
The objective of this study was to understand how consumers react and respond to a service experience provided by the robot, Pepper. To form our predictions, we applied and tested an extended version of the technology acceptance model (TAM). For the method, pre-recorded gestures were used to attract people to interact with Pepper, and participants were asked to pose questions to the robot for 5 to 10 min. Then, we distributed a questionnaire to these participants to gather data on their impressions of the interaction. Based on a final sample of 180 respondents, we used structural equation modeling (SEM) to test our hypotheses. Our results showed the fundamental importance of Social Presence when it comes to the use of robots. Social presence had a direct positive effect on Usefulness, Trust, and Emotional Appeal, and significant indirect effects through all three paths on Intention to Use. Moreover, The Fear of Robots negatively impacted the Intention to Use. We also found that when people were in discussion with the robot, they completely forgot that a human concierge is controlling the robot from another place. This study provides important insights into how and why consumers react to a service-providing robot, which is an important stream of research as this technology becomes more feasibly implemented in the hospitality industry.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The market for service robot technologies and telepresence solutions is expected to grow remarkably in the near future, and the use of service robots has been gaining attention in particular for delivering human services in hospitality and tourism industry [32]. Service delivery robots are becoming increasingly integrated into the workforce with two major goals: (1) to optimize service productivity and (2) to enhance the customer experience. Yet while it is clear that advances in technology make service robots more feasible, the willingness of consumers to use robots as part of a service experience is much less clear. How and why consumers respond to service robots is thus an important area of study to help inform the hospitality industry about the potential benefits and issues associated with this new technology.
According to the International Organization for Standardization, a “service robot” is a robot “that performs useful tasks for humans or equipment excluding industrial automation applications” (ISO 8373). Service robots are system-based autonomous and adaptable interfaces that interact, communicate, and deliver a service to an organization’s customer [46]. Service robots can be either humanoid, by simulating a human appearance (e.g., Sanbot Max or Pepper, see Fig. 1) or non-humanoid (e.g. Roomba the cleaning robot), and research shows that interactions with a physical robot provides an enhanced experience over simply interacting with a voice assistant like Amazon’s Alexa [40]. Robots are increasingly capable of completing cognitive-analytical tasks thanks to underlying computer power or emotional-social capacities (e.g., reception robots) as well as marked improvements in voice user interfaces [28]. As robots can be connected to a Customer Relationship Management (CRM) system, they have the potential to provide customized service. As such, for the service sector, the opportunities offered by robotics in combination with cameras, sensors, speech recognition, big data, artificial intelligence, mobile, and cloud technology are especially promising [46]. With their local input (e.g. cameras, microphones, and sensors) and their ability to access other sources such as the internet or a knowledgebase, service robots will be increasingly able to provide services to customers with increased efficiency and accuracy. Of course, just because something can be built does not mean it necessarily should be built. Thus, research on the interactions of people with robots is needed as a complement to the increasingly abundant research related to the technological advances that can improve robot design and construction.

Pepper robot
While the labor efficiencies provided by robots are well known for sectors such as manufacturing, as this technology becomes omnipresent in the service sector, research needs to keep pace with the introduction of new technologies to understand their potential effects on the service experience. Although technology may allow a certain type of service to be provided, this does not necessarily mean that the method of service delivery will positively affect the customer service. The projected growth of using robots as concierges in hotels, museums, and airports [35] only highlights the need for work in this area. Similarly, several researchers have investigated the use of so-called telepresence robots in different contexts and scenarios, including remote visits of libraries or museums [18], as a concierge in parks [41], and as home assistants for elderly healthcare (e.g. [31, 34]. The research on the influence of robots on the service experience, though, is at a very nascent stage. The purpose of this research is therefore to help understand how customers react to a service experience with a robot, to better inform the hospitality field of the sort of antecedents and consequences associated with the successful (or unsuccessful) implementation of robots as service providers.
2 Robots in Hospitality Industry
Robots are increasingly becoming integrated into the operations of hotels, which has a significant impact on customers’ service experience [44]. Indeed, Buhalis and Leung [3] considered the role of the “smart hospitality ecosystem” and shared several examples of robot and IoT usage in the hospitality industry (Hotel Jen of Shangri-la, Henn-na Hotel, Marriott International, etc.). Similarly, Bowen and Whalen (2018) argued that human interactions between host and customer are being replaced by human–robot interactions. Given this role that robots can play in service delivery, research has mainly focused on human–robot interactions and the acceptance of technology [27, 43, 44, 47]. As Ivanov and Webster [26] demonstrate, the adoption of robotics in the hospitality context has financial benefits (e.g. labor cost savings) and non-financial benefits such as a better perception of service quality through new attractive and interactive ways of delivering a service, communicating information, and engaging with customers. In their research, Ivanov et al. [27] explored which of the robot’s hotel-related activities are the most easily accepted by consumers. Their results revealed that customers can show an interest when the robot is used as a concierge and other hotel-related tasks (e.g. information providers, transporting goods, payments). At the same time, they noted that customers might prefer the high-touch of human-delivered services rather than the high-tech service delivery process. For example, customers might feel uncomfortable and unsure about the way they can use the concerned technology. Related to the profiles of service agent, Choi et al. [4] compared three service agents for a hotel (human service agent, robot, and kiosk), finding that people evaluated the service encounter more favorably when the human service agent used literal language. They also mentioned, however, that this language style can be applied to service robots as their humanlike features (a face, arms, and body shape). Prior research thus seems to indicate that consumers’ willingness to integrate service robots as substitutes for human staff at hospitality service encounters depends on the robot’s performance efficacy and anthropomorphism, the customer’s intrinsic motivation, social influences, and trust in the technology, and the context’s facilitating conditions. Ultimately, we argue that we need to consider these key factors on how customers perceive robots—their perceptions of usefulness, social presence, aesthetic, emotional appeal and trust in the robot’s recommendations—and customers view of the technology in general—their discomfort (i.e., fear) of the technology—that combine to predict individuals’ acceptance of the technology.
3 Technology Acceptance Model (TAM) Applied to Frontline Service Robots
To gain a better understanding of how and why robots will be accepted by consumers in the hospitality industry—and ultimately, the extent to which consumers express a willingness to use the technology—it makes sense to build on what is already known about the acceptance of technological innovations. We thus specifically build on the Technology Acceptance Model (TAM). Yet, according to Flandorfer [13], compared to traditional TAM studies, TAM applied to robots is more intricate because robots are complicated and multifaceted devices. Research shows that acceptance of robots depends on complex dynamics between several factors: (1) the user’s characteristics, (2) the robot’s characteristics, (3) the user’s beliefs about the robot and about his/her interactions with it, and (4) variables such as attitude toward use, use intention, and prior usage experiences [7]. It would seem that age, gender, cultural background, and personality are all factors that may correlate with users’ adoption of robotics. For example, Eyssel et al. [12] conducted an experiment to determine if people show a higher propensity to accept a robot when the robot’s voice is (1) human-like versus synthesized, and (2) female versus male. Their results showed that participants demonstrated greater acceptance and felt psychologically closer to the robot when the robot and participants shared the same gender and when it used a human-like voice. In addition, the robot’s characteristics played a role in whether it is accepted or rejected. These characteristics include both utilitarian (e.g. usefulness, ease of use) and hedonic aspects (e.g. enjoyment, attractiveness) [7]. Similarly, users were more likely to accept and had a higher intention to use a robot that demonstrated social abilities [9]. Furthermore, Gaudiello et al. [15] investigated human–robot acceptance more deeply by focusing on trust. Their study suggested that distrust of robots is correlated to the nature of the task. Most notably, they found that robots are more easily accepted in functional tasks rather than in social tasks. These results stand in contrast with the findings of De Ruyter and Aarts [9] and underscore the interdependence between factors, which can influence technology uptake in different ways. Regarding the hedonic aspects, De Graaf and Ben Allouch [7] demonstrated that TAM would be enhanced if robot design were to include user experience variables such as enjoyment, adaptability, sociability and perceived behavioral companionship. Indeed, their research showed that enjoyment had an influence on use attitude, ease of use, and use intention. Finally, the control beliefs of the user about the robot, such as past experience with robots and perceived behavior control, affect the adoption of the technology. Because people do not have the same resources and capacities toward robotics, an individuals’ lack of knowledge about technology can make them feel overwhelmed, which makes them less likely to use robotics [2].
TAM as well as more specific work into users’ reactions to robots thus shows that it is a variety of users’ perceptions that play a pivotal role in determining the willingness of individuals to take advantage of the technology. The host of variables considered, as well as the diverse approaches taken, has failed to yield a coherent model that can be used to understand consumer reactions to robots in the service sector. We thus turn to building on this literature to develop such a model.
4 Research Model and Hypotheses
Learning from prior research on TAM in general, as well as the specific content associated with consumers’ reactions to robots, we thus develop our model by focusing on the following constructs: the social presence, aesthetic, emotional appeal, and usefulness of the robot; consumers’ perceptions of trust in the robot’s recommendations as well as consumers’ general fear of robots; and ultimately the extent to which an individual expresses an intention to use the technology. These constructs represent the general themes of issues addressed in this literature that are most applicable to understanding this technological adoption in services. The specific rationale for these constructs and the hypotheses about their relationships are developed below.
4.1 Affective Perceptions and Reactions to Robots
Social presence is “the experience of sensing a social entity when interacting with the system” [22], p. 529). Robots can attract people’s attention with their social presence [39], and a robot’s Automated Social Presence (i.e., giving the impression that there is someone else present with us) should influence customers’ experiences and the way they find robots to be useful [45]. The extent to which a robot can be made human-like, such as by being seen as acting with empathy, plays a crucial role in human–robot interactions [8]. Perceptions of social presence should therefore be a key value for judging the robot being useful for an interaction [14]. Relatedly, Heerink et al. [23] found that the sense of social presence with a robot is positively associated with users’ assessments of the robot’s capabilities. Hence, we propose the following hypothesis:
4.1.1 H1: A robot’s Social Presence Impacts Positively its Usefulness
Social presence, though, should influence the user experience in ways beyond just perceptions of utility. Unlike other technologies, the embodiment that coincides with robot design indicates that the extent to which the robot emulates human interactions should influence reactions to the technology (Kang and Kwak [29, 47]. As such, perceptions of trust has emerged as a critical construct for understanding user reactions to new technology. Trust is defined as “The belief that the system performs with personal integrity and reliability” [22], p. 529) and that it will perform tasks well [15], p. 363). A robot with more social capacities should be more trustworthy because it is seen as being intelligent. Furthermore, people are more willing to interact with a robot that has human characteristics and attitudes, such as making eye contact [1], Kang and Kwak [29]). Social presence is also enhanced by the appearance and voice of the robot because it affects how people rate the sociability of the robot (Broadbent [2]). Thus, a greater human-like presence should enhance users’ overall acceptance of the robot-human interaction. This which leads us to the following hypothesis:
4.1.2 H2: A Robot’s Social Presence has a Positive Influence on Trust
Trust by itself does not fully capture users’ affective reactions from the human–robot interaction. In their study where participants interacted with two robots (one that showed socially intelligent conditions and the other one that did not), Heerink et al. [20] found that all participants felt comfortable interacting with the social robot, and 47% felt uncomfortable interacting with the less social robot. Several years later, Heering et al. (2009, 2010) found that the perceived enjoyment of people interacting with the robot is influenced by the social presence. Fridin and Belokopytov [14] found the same results studying the acceptance of adults with social assistive robots. Indeed, the robot was joking and pranking the participants (which shows social abilities) and it led to a higher emotional appeal. Therefore, we suggest the following hypothesis:
4.1.3 H3: A Robot’s Social Presence Impacts Positively its Emotional Appeal
In a related line of work, while studying social robots, De Graaf and Ben Allouch [7] found that the aesthetic (e.g. anthropomorphism, realism, etc.) influenced the experience of the user. Indeed, their research showed that a robot’s attractiveness explained the extent of users’ enjoyment. According to Broadbent et al. [2], humanness, size, and gender are important variables of aesthetic. For example, a robot that is really tall might be impressive, but inadequate for use with children because it may make them feel anxious. Therefore, matching the robot’s role, aesthetic, and behavior to a specific situation should lead to a higher acceptance of the robot and be positively correlated with emotional appeal. Consistent with this line of reasoning, Tussyadiah and Park [44] found that anthropomorphism enhances emotional attachment with robots (2018). Therefore, we propose the following hypothesis:
4.1.4 H4: A Robot’s Aesthetic Impacts Positively its Emotional Appeal
As noted above, trust relates to beliefs about the integrity and reliability of a system [22] as well as its potential for performing tasks well [15]. Consideration of trust answers questions such as “I would trust the robot if it gave me good advice” or “I would follow the advice the robot gives me.” Gaudiello et al. [15] explored the issue of trust, seeking to determine if users trust robots when they makes decisions on both functional and social issues. Their results showed that participants were inclined to consider the robot not trustworthy enough to make better decisions than humans, except when these decisions concern functional issues that require high-precision technical skills [15]. In essence, functional tasks seem to be more easily accepted than social ones. De Graaf and Ben Allouch [7] explained that trusting the technology affects the way people perceived the robot’s accessibility and usefulness. The guarantee that users will gain utility from their interactions with robots depends on the degree of trust in the robots and the information they delivered. Therefore, we propose the following hypothesis:
4.1.5 H5: Having Trust in the Robot Impacts Positively its Usefulness
Of course, when using a robot, individuals simultaneously evaluate if the robot shows integrity and reliability. If the robot does not elicit these perceptions, people might get anxious or have negative emotional reactions after the interactions [24]. Alternatively, when a robot has a funny attitude, it increases the self-confidence of the participants and reduced their anxiety [14]. Also, if the participants feel that the robot is trustworthy, they might have a certain feeling of security, resulting in some positive emotions such as excitement [42]. Therefore, we propose the following hypothesis:
4.1.6 H6: Having Trust in the Robot Impacts Positively its Emotional Appeal
4.2 Predicting Consumers’ Intentions to Use
While TAM and related research articulate the importance of users’ reactions and perceptions for understanding the robot-human interaction, the ultimate variable of interest from this research is to provide an understanding of whether consumers will ultimately want to use the robotic technology. And in this line of reasoning, usefulness is the fundamental variable underlying consumers’ intention to use [11, 38]. In their study, Park and Kwon [38] found that usefulness was a crucial variable to explain intention to use because they were working with a teaching robot: it has to be useful and efficient,otherwise people will not use it. Fridin and Belokopytov [14] found a strong and significant relationship between usefulness and intention to use while studying elementary teachers’ acceptance of a socially-assistive robot. Arguably regardless of the task of a robot, if the robot is not useful, individuals will not have a high intention to use it. Usefulness thus is likely a necessary (although maybe not sufficient) characteristic of a robot for there to be any potential adoption of the technology. For the purpose of developing a model explaining the use of robots by consumers, it is relevant for us to compare the importance of this connection compared to other variables impacting intention to use. We therefore form the following hypothesis:
4.2.1 H7: A Robot’s Usefulness Impacts Positively the Intention to Use it
The importance of the other affective reactions to robots reviewed above, though, suggest that usefulness is just one factor needed to facilitate consumers’ use of the technology. If individuals evaluate the robot as being untrustworthy, it is unlikely they will intend to use it in the future. This situation applies to social robots that perform tasks such as teaching, helping the elderly or providing information. This is why the construct of trust influences the intention to use, and it has been positively validated by several authors [7, 14]. The degree of trust in the information delivered by a robot can potentially impact users’ intention to interact again with it. Therefore, we suggest the following hypothesis:
4.2.2 H8: Having Trust in the Robot Impacts Positively the Intention to Use it
The influence of emotional appeal on intention to use has also been studied and validated by several authors (e.g. [4, 10, 14, 21, 38]. According to Klamer et al. [30], hedonic and pleasurable factors play an important role in the acceptance and use of robots. Indeed, they say that when users feel emotions such as enjoyment or playfulness while interacting with the robot, it has an influence on the intention to use. Furthermore, in their study about acceptance of teaching assistant robots, Park and Kwon [38] found that perceived enjoyment had a significant impact on the intention to use the technology. In the same way, Heerink et al. [21] studied the importance of enjoyment for the acceptance of technology by elderly people. According to the authors “perceived enjoyment after a first experience with a system would have a predictive influence on the intention of elderly users to use it and this intention would predict the actual use of it” (p.113). Based on these arguments, we propose the following hypothesis:
4.2.3 H9: A Robot’s Emotional Appeal Impacts Positively the Intention to Use it
Finally, we turn to considering consumers’ actual fear of the technology. Although the construct fear of robots is not generally included in technology acceptance models, related research suggests that it may be an important variable for this context. For example, the Almere model, a model about the acceptance of assistive social agent technology by older adults [23], showed that fear of the technology played a critical role in the likelihood that the technology would be used. The Almere model defines anxiety as causing anxious or emotional reactions in real or imaginary human–robot interactions, and is linked to assumptions such as “I find the robot scary or intimidating” [23], p.364). According to Heerink et al. [23], anxiety influences a variety of perceptions, including attitudes as well as perceptions of usefulness and ease of use. De Graaf and Ben Allouch [7] explained that there is a correlation between enjoyment, anxiety and perceived behavioral control. Furthermore, they showed that this correlation is important for social robot acceptance. Indeed, enjoyment should reduce anxiety and comfort people in their aptitudes to successfully use and interact with the robot. Nomura et al. [36] exhibited that fear and negative attitudes toward robots influenced the behavior of humans toward robots, such as “time spent in communicating with and touching them” (2008, p.449). Therefore, we suggest the following hypothesis:
4.2.4 H10: The Fear of Robots Impacts Negatively the Intention to Use it
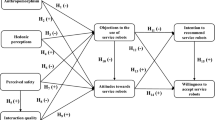
Figure 2 shows our extended model of TAM. The figure summarizes the hypothesizes developed above, as well as visually represents the hypothesized process through which we expect consumers’ perceptions and attitudes ultimately combine to predict intentions to use the technology.

Research model
5 Methodology
5.1 Measures
We relied upon existing measures of our focal constructs to test our model, adapting the measures as necessary to be applicable to the context of interactions with robots. The 36-item survey provided response options for each item ranging from 1 (strongly disagree) to 7 (strongly agree).
As noted above, utilitarian aspects of technology can be considered to encompass both usefulness and ease of use. Both Usefulness and Ease of Use were assessed with items adapted from Davis (1989). As we explain below, however, these items were eventually combined into a single factor, which we labeled as Usefulness in subsequent analyses.
Social Presence was assessed with items adapted from Gefen and Straub [17]. Trust was assessed with items adapted from Gefen and Straub [17], Gefen and Straub [16], and Cyr et al. [5]. Aesthetic was assessed with items adapted from De Graaf and Ben Allouch [7]. Emotional Appeal was assessed with items adapted from Hassanein and Head [19]. Fear of Robots was assessed with items adapted from Nomura et al. [36].
Our ultimate dependent variable, Intention to Use, was assessed with items adapted from Hellier et al. [25]. In our case, we combined the Level of Satisfaction and the Intention to Use as prior research has shown that items for these two measures are highly related, a finding that has been confirmed several times (cf. [25, 37]. Indeed, our data shows the two items to be very highly related (correlated 0.55) and load equally on a single construct (loadings of 1.000 and 1.080, which are not statistically significantly different from each other, p = 0.608). We therefore judged that there is no utility to separate them here for our model. We labeled the resultant measure Intention to Use for all subsequent analyses. In Table 1, the items for all constructs are represented.
5.2 Sampling and Data Collection Procedures
As the aim of this research is to assess how customers willingness to use the services delivered by a robot as a concierge, Pepper was mainly placed in the lobby of a business school. The assessment was conducted by two people. The first person (the concierge) maintained control of Pepper from a remote room, whereas the other person remained with the robot, engaging people to interact with it and making sure the questionnaire was filled out after the interaction. We had two populations of respondents. One population were not aware that someone was controlling the robot, while the second population were told that a human concierge could be contacted if the robot was not able to answer a question. Pepper was controlled with the Avatar Remote Control application on a tablet. Questions asked by the users were very diverse, ranging from “How is the weather?” to precise questions about the school. To be able to answer all sorts of questions, the ‘concierge’ with the tablet was connected to the system from another room and was able to check any information. Pre-recorded gestures were used to attract people to come and interact with Pepper or as entertainment during the interaction. Those who were willing to engage with the robot were asked to pose questions to the robot over a period of 5 to 10 min. The assistant then distributed our questionnaire to participants to gain information about their perceptions of the interaction. Figure 3 shows the interaction in terms of process. We had 180 respondents (43.3% male and 56.7% female). The age of respondents was between 18 and 71, with an average age of 29.14.

Nature of the experiment
6 Results
6.1 Reliability and Validity of Measures
Summary statistics of the study’s variables are shown in Table 2. We considered several characteristics of each measure, including its reliability (both alpha and omega) and its average variance extracted (AVE). Note that although we ultimately use structural equation modeling to test our model and hypotheses, and although omega provides a better measure of reliability [6, 33], we also report coefficient alpha due to its ubiquity in research papers [6].
While most measures looked adequate at first glance, there were some concerns about the measures of ease of use and usefulness. In particular, the reliability of ease of use was low (alpha and omega were 0.60), and the square root of its AVE was less than its correlation with the measure of usefulness. Because of this, we conducted a set of confirmatory factor analyses, comparing a two-factor solution (with ease of use and usefulness represented as separate constructs) to a one-factor solution (where they loaded on the same construct). Results indicated that the two-factor solution was not significantly better fitting than the one-factor solution (ΔX2 = 1.55, df = 1, p = 0.15). It thus appears that ease of use and usefulness represent the same underlying construct, at least with respect to the use of robots in this context. We therefore combined the items from the two measures into a single construct, which indeed had adequate reliability (alpha = 0.86, omega = 0.87), and the square root of its AVE was greater than its correlation with all remaining measures.
All other measures demonstrated adequate reliability and construct validity. All measures of reliability were above 0.7, all measures of AVE were greater than 0.5 (Fornell and Larcker, 1981), and the square root of AVE was greater than other correlations in the matrix (Gefen et al. 2000; Straub et al. 2004). A measurement model, conducted with SEM, revealed overall good fit (RMSEA = 0.07, CFI = 0.90, TFI = 0.90), and all factor loadings were greater than 0.7 and statistically significant (see Table 1).
6.2 Results and Discussion
SEM was the most appropriate way to test the hypotheses because the model employed several latent variables. Mplus version 8.4 (2019) was used to conduct the analysis. Table 1 reports the item loadings in the measurement model; Fig. 4 shows the results of the structural model used to test our hypotheses.

Results of the SEM analysis
Overall, as Fig. 4 shows, the majority of our hypotheses are supported. A summary of our hypotheses tests and results is provided in Table 3. Details about our results and hypothesis tests are provided below.
The Usefulness of the robot was impacted by Social Presence (γ = 0.57, SE = 0.16, p < 0.001), Therefore, H1 is confirmed.
Social Presence had a positive impact on Trust (γ = 0.93, SE = 0.13, p < 0.001). The combination of Social presence and the control variables of age (γ = -0.19, SE = 0.076, p < 0.05) and gender (γ = -0.10, SE = 0.05, p < 0.05) explained 78% of variance. This supports H2. Relatedly, Social Presence had a positive effect on Emotional Appeal (γ = 1.28, SE = 0.29, p < 0.001), which supports H3.
Not all findings, however, supported the hypotheses. Contrary to H4, aesthetic did not significantly predict emotional appeal. Also, Trust did not predict Usefulness, thus failing to support H5. Also, despite the positive correlation between Trust and Emotional Appeal (r = 0.52, p < 0.001), after controlling for the effects of Social Presence and Aesthetic, Trust actually had a negative relationship with Emotional Appeal (γ = − 0.61, SE = 0.24, p < 0.01), which is actually in direct contrast to our hypothesis. It should be noted, however, that the correlation between Trust and Emotional Appeal is significantly positive (r = 0.52, p < 0.0001). Thus, it is only after controlling for the effects of Social Presence that the (partialled) effect of Trust becomes negative.
The four hypotheses all related to the prediction of Intention to Use were supported. The effects of Usefulness (γ = 0.50, SE = 0.18, p < 0.01), Trust (γ = 0.29, SE = 0.086, p < 0.001), and Emotional Appeal (γ = 0.45, SE = 0.093, p < 0.001) were all significant and positive, thus supporting H7, H8, and H9 respectively. Also as predicted, the effect of Fear of Robots (γ = -0.11, SE = 0.057, p < 0.05) was significant and negative, supporting H10. Overall, the combination of Usefulness, Trust, Emotional Appeal, and Fear of Robots, explained 92% of the variance in individuals’ Intention to Use the robots.
7 Conclusion
The market of service robot technologies and telepresence solutions is expected to grow markedly during the next ten years. This trend will, in all likelihood, have a major impact on firms’ service productivity. Indeed, service robots can potentially increase firms’ service productivity and have a major impact on employment. With the development and refinement of AI technologies, robots will increase their abilities to interact with clients. In addition, they will increasingly help the employees of a firm by assisting them in their interactions with guests. Interestingly, we also observed that when people were in discussions with our study’s robot, they completely forgot that a human concierge was controlling the robot from another place. Indeed, comparing the two clusters of people (one group knowing the fact that a human can take the control of the communication and one group without having this information) the difference of the perception was not significant. As the voice of the robot is not “human”, the feeling of immersion is very high.
Our results showed the fundamental importance of social presence when it comes to the use of robots. Social Presence had a direct positive effect on Usefulness, Trust, and Emotional Appeal, and thereby indirect effects through all three paths on Intention to Use. Our results confirmed previous research done by several authors such as Pinillos et al. [39], Fridin and Belokopytov [14], and Heering et al. (2009, 2010). Separate analyses showed that Social Presence had no direct effect on Intention to Use (if added to the model depicted in Fig. 4, γ = 0.78, SE = 1.68, p = 0.64). Nonetheless, the total standardized indirect effect of Social Presence (using MPlus' INDIRECT method, based on 1000 bootstrapped model) of 0.811 (95% CI = [0.672, 0.962]) was large and significant.
Our results also confirmed several previous research findings (e.g. [14, 38] that had shown a positive relationship between Usefulness and Intention to Use. The relationship between Trust and Intention to Use also confirmed several prior research findings (e.g. [7, 14]. Finally, we observed the positive impact of the robot Emotional Appeal on the Intention to Use and at the same time the negative impact of the Fear of Robots. Therefore, our results confirmed previous research done about these various relationships (e.g., [7, 23, 30, 36], but did this in one unified model.
8 Limitations and Future Research
The study of robots, as well as the nature of the sort of experiments that must be conducted to test aspects of people’s reactions to the technology, poses difficulties when engaging in such research. Very notably, despite the growing potential for robots in the workplace, service robots are still somewhat rare, which makes focused research efforts quite difficult. While the data and measures in this study are somewhat preliminary and would benefit from greater refinement, these limitations are necessary in early work on the effects of service robots in workplace settings, and particularly for the hospitality industry. Thus, we relied on a convenience sample to test our hypotheses.
Another limitation of our research effort is that aspects of the sample are fairly homogenous, which could limit the generalizability of our findings. In our sample, even though respondents ranged in age between 18 and 71, the average was 29 years old. It is possible that the younger nature of the sample yielded patterns that may not generalize to older or more diverse populations. Limitations in data collection (and in particular, the issues associated with power due to sample size) also prevented us from examining other potential explanatory factors, such as subjects’ experiences with technology, personality, and education, as well as potentially exploring in more depth the effects attributable to gender and age.
It would clearly be valuable for future research to test our model in different populations, and in particular in samples of people who are older. It would also be valuable for future research to expand our model to consider other individual factors that may influence the reaction to and adoption of new technologies. For example, future research should use experimental designs and manipulate the level of key antecedents (such as social presence, usefulness, and emotional appeal) to allow stronger causal conclusions of their influences. Given the nascent stage of research into customers’ perceptions of and reactions to robots, it is not overly surprising that research employs surveys and observational studies. That said, we hope this study will encourage future research on this topic which will employ a variety of research methodologies to further build on our understanding of service robots in hospitality.
We should also note that we observed that the respondents were sometimes impressed by the technology itself and not only the “concierge-receptionist” aspect of the robot. While extensive evidence suggests that robots will become increasingly common, and they will be used in various settings, they still represent a fairly novel technology. It is unclear if sustained interactions with the technology would necessarily yield the same findings once the novelty of the interactions has passed. Future research is thus needed in this area not just for the purpose of replication, but because the effects associated with the antecedents in our model may change as the presence of this sort of technology becomes more prevalent.
While the issues described above certainly may limit the confidence of the generalizability of our findings, they also present interesting questions for future research to pursue. Research on the effects of robots in hospitality is still in its early stages, and thus it is likely that research efforts like this one are bound to raise more questions than they can answer. Several questions have to be asked: How is our personal data used during (and after) our interaction with a robot? Does the robot have the authorization to record a situation or an interaction with a guest? Should robots be taxed? Will robots be used to save money by replacing humans, or will efficiencies gained through the use of robots lead to new as of yet unknown jobs designed to improve the consumer experience? There are many questions, and academic research is only starting to scratch the surface in terms of understanding the role and effects that robots will play in the future of the hospitality industry. Yet, even with answers to these specific questions as yet unknown, it is clear that the development of the next generation of service robot technologies will have a significant impact on the productivity of firms, on jobs, and on the customer experience.
References
Bowen J, Whalen E (2017) Trends that are changing travel and tourism. Worldw Hosp Tour Themes 9(6):592–602
Broadbent E, Stafford R, MacDonald B (2009) Acceptance of healthcare robots for the older population: review and future directions. Int J Soc Robot 1(4):319–330
Buhalis D, Leung R (2018) Smart hospitality—Interconnectivity and interoperability towards an ecosystem. Int J Hosp Manag 71:41–50
Choi S, Liu SQ, Mattila AS (2019) How may i help you? Says a robot: examining language styles in the service encounter. Int J Hosp Manag 82:32–38
Cyr D, Bonanni C, Bowes J, Ilsever J (2005) Beyond trust: Web site design preferences across cultures. J Glob Inf Manag 13(4):24–52
Cortina JM, Sheng Z, Keener SK, Keeler KR, Grubb LK, Schmitt N, Tonidandel S, Summerville KM, Heggestad ED, Banks GC (2020) From alpha to omega and beyond! A look at the past, present, and (possible) future of psychometric soundness in the Journal of Applied Psychology. J Appl Psychol 105(12):1351–1381
De Graaf MM, Ben Allouch S (2013) Exploring influencing variables for the acceptance of social robots. Robot Auton Syst 61(12):1476–1486
De Kervenoael R, Hasan R, Schwob A, Goh E (2020) Leveraging human-robot interaction in hospitality services: incorporating the role of perceived value, empathy, and information sharing into visitors’ intentions to use social robots. Tour Manage 78:1–15
De Ruyter B, Aarts E (2004) Ambient intelligence: visualizing the future. In: Proceedings of the working conference on Advanced visual interfaces, pp. 203–208
Etemad-Sajadi R (2016) The impact of online real-time interactivity on patronage intention: the use of avatars. Comput Hum Behav 61:227–232
Etemad-Sajadi R, Gomes Dos Santos G (2019) Senior citizens’ acceptance of connected health technologies in their homes. Int J Health Care Qual Assur 32(8):1162–1174
Eyssel F, De Ruiter L, Kuchenbrandt D, Bobinger S, Hegel F (2012) If you sound like me, you must be more human: on the interplay of robot and user features on human-robot acceptance and anthropomorphism. In 2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (pp. 125–126). IEEE
Flandorfer P (2012) Population ageing and socially assistive robots for elderly persons: the importance of sociodemographic factors for user acceptance. Int. J. Popul. Res. 12:1–13
Fridin M, Belokopytov M (2014) Acceptance of socially assistive humanoid robot by preschool and elementary school teachers. Comput Hum Behav 33:23–31
Gaudiello I, Zibetti E, Lefort S, Chetouani M, Ivaldi S (2016) Trust as indicator of robot functional and social acceptance. an experimental study on user conformation to iCub answers. Comput Hum Behav 61:633–655
Gefen D, Straub D (2004) Consumer trust in B2C e-commerce and the importance of social presence: experiments in e-products and e-services. Omega 32(6):407–425
Gefen D, Karahanna E, Straub DW (2003) Trust and TAM in online shopping: an integrated model. MIS Q 27(1):51–90
Guth L, Vander Meer P (2017) Telepresence robotics in an academic library: a study of exposure and adaptation among patrons and employees. Library Hi Tech 35(3):408–420
Hassanein K, Head M (2007) Manipulating perceived social presence through the web interface and its impact on attitude towards online shopping. Int J Hum Comput Stud 65(8):689–708
Heerink M, Krose B, Evers V, Wielinga B (2006) The influence of a robot's social abilities on acceptance by elderly users. In ROMAN 2006-The 15th IEEE International Symposium on Robot and Human Interactive Communication (pp. 521–526). IEEE
Heerink M, Kröse B, Wielinga B, Evers V (2008) Enjoyment intention to use and actual use of a conversational robot by elderly people. In: Proceedings of the 3rd ACM/IEEE international conference on Human robot interaction (pp. 113–120). ACM
Heerink M, Krose B, Evers V, Wielinga B (2009) Measuring acceptance of an assistive social robot: a suggested toolkit. In RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication (pp. 528–533). IEEE
Heerink M, Kröse B, Evers V, Wielinga B (2010) Assessing acceptance of assistive social agent technology by older adults: the almere model. Int J Soc Robot 2(4):361–375
Heerink M (2011) Exploring the influence of age, gender, education and computer experience on robot acceptance by older adults. In: Proceedings of the 6th international conference on Human-robot interaction (pp. 147–148). ACM
Hellier PK, Geursen GM, Carr RA, Rickard JA (2003) Customer repurchase intention: a general structural equation model. Eur J Mark 37(11/12):1762–1800
Ivanov S, Webster C (2017) Adoption of robots, artificial intelligence and service automation by travel, tourism and hospitality companies - a cost-benefit analysis. International Scientific Conference "Contemporary tourism - Traditions and innovations", (pp. 1–10). Sofia
Ivanov SH, Webster C, Berezina K (2017) Adoption of robots and service automation by tourism and hospitality companies. Revista Turismo & Desenvolvimento 27(28):1501–1517
Jungbluth J, Krieger R, Gerke W, Plapper P (2018) Combining virtual and robot assistants-a case study about integrating amazon's alexa as a voice interface in robotics. In: Robotix-Academy Conference for Industrial Robotics (RACIR) 2018 (p. 5). Shaker
Kang D, Kwak SS (2017) Feel me if you can: the effect of robot types and robot's tactility types on users' perception toward a robot. In: Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (pp. 155–156)
Klamer T, Allouch SB, Heylen D (2010) Adventures of Harvey–Use, acceptance of and relationship building with a social robot in a domestic environment. In: International Conference on Human-Robot Personal Relationship (pp. 74–82). Springer, Berlin, Heidelberg
Koceski S, Koceska N (2016) Evaluation of an assistive telepresence robot for elderly healthcare. J Med Syst 40(5):121–128
Lu L, Cai R, Gursoy D (2019) Developing and validating a service robot integration willingness scale. Int J Hosp Manag 80:36–51
McNeish D (2018) Thanks coefficient alpha, we’ll take it from here. Psychol Methods 23(3):412–433
Michaud F, Boissy P, Labonte D, Corriveau H, Grant A, Lauria M, Royer MP (2007) Telepresence robot for home care assistance. In: AAAI spring symposium: multidisciplinary collaboration for socially assistive robotics, pp. 50–55
Murphy J, Hofacker C, Gretzel U (2017) Dawning of the age of robots in hospitality and tourism: challenges for teaching and research. EurJ Tour Res 15:104–111
Nomura T, Kanda T, Suzuki T, Kato K (2008) Prediction of human behavior in human–robot interaction using psychological scales for anxiety and negative attitudes toward robots. IEEE Trans Rob 24(2):442–451
Oliver RL (1980) A cognitive model of the antecedents and consequences of satisfaction decisions. J Mark Res 17(4):460–469
Park E, Kwon SJ (2016) The adoption of teaching assistant robots: a technology acceptance model approach. Program. Data Technol Appl 50(4):354–366
Pinillos R, Marcos S, Feliz R, Zalama E, Gómez-García-Bermejo J (2016) Long-term assessment of a service robot in a hotel environment. Robot Auton Syst 79:40–57
Pollmann K, Ruff C, Vetter K, Zimmermann G (2020) Robot vs. voice assistant: is playing with pepper more fun than playing with alexa?. In: Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (pp. 395–397)
Rano I, Raducanu B, Subramanian S (2004) Human presence detection and tracking for a concierge robot. IFAC Proc Vol 37(8):986–991
Tung VWS, Au N (2018) Exploring customer experiences with robotics in hospitality. Int J Contemp Hosp Manag 30(7):2680–2697
Tung VWS, Law R (2017) The potential for tourism and hospitality experience research in human-robot interactions. Int J Contemp Hosp Manag 29(10):2498–2513
Tussyadiah IP, Park S (2018) Consumer evaluation of hotel service robots, Information and communication technologies in tourism 2018. Springer, Cham, pp 308–320
Van Doorn J, Mende M, Noble SM, Hulland J, Ostrom AL, Grewal D, Petersen JA (2017) Domo Arigato Mr. Roboto: emergence of automated social presence in organizational frontlines and customers’ service experiences. J Serv Res 20(1):43–58
Wirtz J, Patterson PG, Kunz WH, Gruber T, Lu VN, Paluch S, Martins A (2018) Brave new world: service robots in the frontline. J Serv Manag 29(5):809–833
Zhong L, Verma R (2019) Robot rooms: how guests use and perceive hotel robots. Cornell Hosp Rep 19(2):1–8
Acknowledgements
We would like to thank Marie Schöpfer (academic assistant) for her contribution to this article, Professor Andres Perez-Uribe at HEIGVD and the company Avatarion for their collaboration around this project. We also thank Innosuisse and HES-SO for their support.
Funding
Open Access funding provided by Haute Ecole Specialisée de Suisse occidentale (HES-SO).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Etemad-Sajadi, R., Sturman, M.C. How to Increase the Customer Experience by the Usage of Remote Control Robot Concierge Solutions. Int J of Soc Robotics 14, 429–440 (2022). https://doi.org/10.1007/s12369-021-00800-x
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-021-00800-x