
Abstract
This paper aims to show that there exists a triangulation of the Heisenberg group \(\mathbb {H}^n\) into singular simplexes with regularity properties on both the low-dimensional and high-dimensional layers. For low dimensions, we request our simplexes to be horizontal while, for high dimensions, we define a notion of straight simplexes using exponential and logarithmic maps, and we require our simplexes to have high-dimensional straight layers. A triangulation with such simplexes is first constructed on a general polyhedral structure and then extended to the whole Heisenberg group. In this paper, we also provide some explicit examples of grid and triangulations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The aim of this paper is to show that there exists a triangulation of the Heisenberg group \(\mathbb {H}^n\) into singular simplexes with regularity properties on both the low-dimensional and high-dimensional layers. The Heisenberg group \(\mathbb {H}^n\), \(n \ge 1\), with a group operation *, is the \((2n+1)\)-dimensional connected, simply connected and nilpotent Lie group identified through exponential coordinates with \(\mathbb {R}^{2n+1}\). Such a group has two important automorphisms playing a role in its geometry: left translations (with respect to a fixed point) and anisotropic dilations. In addition, the Heisenberg group is a Carnot group of step 2 with Lie algebra \(\mathfrak {h} = \mathfrak {h}_1 \oplus \mathfrak {h}_2\). The horizontal layer \(\mathfrak {h}_1\) has a standard orthonormal basis of left invariant vector fields, \( X_j=\partial _{x_j} -\frac{1}{2} y_j \partial _t\) and \(Y_j=\partial _{y_j} +\frac{1}{2} x_j \partial _t\) for \( j=1,\dots ,n\), which hold the core property that \([X_j, Y_j] = \partial _t=:T \) for each j. T alone spans the second layer \(\mathfrak {h}_2\) and is called the vertical direction. By definition, the horizontal subbundle changes inclination at every point, allowing movement from any point to any other point following only horizontal paths; this allows to define the Carnot–Carathéodory distance \(d_{cc}\), measured along curves whose tangent vector fields are horizontal. In Sect. 3 we show an example of a grid on the Heisenberg group made by cubes of the kind
with \(p \in \mathbb {H}^n\) and \(\epsilon > 0\) small. The faces and subfaces of these cubes enjoy some limited \(\mathbb {H}\)-regularity properties:
Proposition
(3.3–3.4) The interior of each face of \(Q_{\epsilon p, \epsilon }\) is a \(\mathbb {H}\)-regular 1-codimensional surface and each face is a \(\mathbb {H}\)-regular 1-codimensional surface unless the face both is (Euclidean) perpendicular to the t-axis and intersects the t-axis itself. If \(n > 1\), the interior of each subface of \(Q_{\epsilon p, \epsilon }\) is a \(\mathbb {H}\)-regular 2-codimensional surface and each subface is a \(\mathbb {H}\)-regular 2-codimensional surface unless the face both is (Euclidean) perpendicular to the t-axis and intersects the t-axis itself.
Nevertheless, this grid is limited because we cannot choose vertices arbitrarily, and we are constrained by the side length of the faces. Another limit is that, a priori, we do not know whether this grid can support some regularity at each dimension, or get associated with a triangulation of the space \(\mathbb {H}^n\). In Sect. 4 we present a triangulation of the Heisenberg group with some regularity properties. The main inspiration for this section is the preprint from Balogh et al. [2] which, in return, relies on Gromov [10]. Specifically, in Subsect. 4.1 we define a singular k-simplex as a continuous map \(\sigma ^k\):
where \(\Delta ^k\) is the standard k-simplex in \(\mathbb {R}^{k+1}\); then, if \(k>1\), we define its boundary as
where \(\sigma _i^{k-1}\) is the singular \((k-1)\)-simplex that acts as \( \sigma ^k\) on the \(i^{th}\) face of \( \Delta ^{k}\). In Subsect. 4.2, we introduce straight k-simplexes \(\sigma _{p_0, \dots , p_k}: \Delta ^k \rightarrow \mathbb {H}^n\) (Definition 4.6) and horizontal k-simplexes (Definition 4.11). In the Heisenberg group at low dimensions, it is natural to ask objects to be horizontal, while such a natural regularity does not extend to high dimensions. Straight simplexes are defined to provide another idea of regularity fitting for high dimensions. After this, we construct simplexes with horizontality properties on low dimensions and linear combinations of straight layers on high dimensions.
Proposition
(4.15) Let \(\Delta ^k\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\). There exist continuous, \(\delta _r\)-equivariant and \(\tau _q\)-equivariant maps
such that, for each \(\sigma _{p_0, \dots , p_k}^h: \Delta ^k \rightarrow \mathbb {H}^n\),
-
(1)
\(\sigma _{p_0, \dots , p_k}^h\) is a singular simplex with vertices \(p_0, \dots , p_k \in \mathbb {H}^n\),
-
(2)
if \(1 \le k \le 2n+1\), the faces and subfaces of \(\sigma _{p_0, \dots , p_k}^h\) are \(\sigma _{p_0, \dots , \hat{p}_I, \dots , p_k}^h\)’s, \(I \subseteq \{ 0, \dots , k\}\).
Moreover,
-
(3)
if \(1 \le k \le 2n+1\), for \(1\le j\le n, k\) and \(i_0, \dots , i_j \in \{ 0, \dots , k\}\), \(i_0< \dots < i_j\), \(\sigma _{p_{i_0}, \dots , p_{i_j}}^h\)’s are horizontal piecewise linear maps,
-
(4)
if \( n+1 \le k \le 2n+1\), for \(n+1 \le j \le k\) and \(i_0, \dots , i_j \in \{ 0,\dots , k \} \), \(i_0< \dots < i_j\), \(\sigma _{p_{i_0}, \dots , p_{i_j}}^h\)’s are linear combinations of singular simplexes with straight j-layers.
In Subsect. 4.3, we give a notion of triangulation for polyhedrons by applying a partial order to simplexes (Definition 4.20) and subsequently we triangulate the whole Heisenberg group:
Proposition
(4.21) Let \(\Delta ^k\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\). There exists a triangulation of the Heisenberg group \(\mathbb {H}^n\) composed of singular simplexes
such that
-
(1)
for \(0<k \le n\), \(\sigma ^k\)’s are horizontal piecewise linear maps.
-
(2)
for \( n+1 \le k \le 2n+1\), \(\sigma ^k\)’s are singular simplexes with straight k-layer.
Although it is not within the purpose of this paper, this triangulation has been constructed with an eye on mass control and the support of currents on it. The triangulation is indeed a good candidate for supporting currents with finite mass and integrability properties. Further references on this subject are, among others, Sect. 2 in [4], 2.1–2.4 in [2, 14, 15] and ch.10.3 in [7].
2 Preliminaries
In this section, we introduce the Heisenberg group \(\mathbb {H}^n\), its structure as a Carnot group, the standard bases of vector fields and some regularity definitions. There exist many good references for such an introduction and we follow mainly Sects. 2.1, 2.2, 2.3 and 3.1 in [8] and Sects. 2.1 and 2.2 in [5].
2.1 The Heisenberg Group \(\mathbb {H}^n\)
Definition 2.1
The n-dimensional Heisenberg Group \(\mathbb {H}^n\), \(n \ge 1\), with the group operation *, is the \((2n+1)\)-dimensional connected, simply connected and nilpotent Lie group identified through exponential coordinates with \(\mathbb {R}^{2n+1}\), where \(*\) is defined as follows:
with \(x,y,x',y' \in \mathbb {R}^n\), \(t,t' \in \mathbb {R}\) and \(J= \begin{pmatrix} 0 &{} I_n \\ -I_n &{} 0 \end{pmatrix} \). One usually writes \(x=(x_1,\dots ,x_n) \in \mathbb {R}^n\) and \(\mathbb {H}^n= (\mathbb {R}^{2n+1}, * )\) for brevity. Furthermore, with a computation of the matrix product, we see that
In the Heisenberg group \(\mathbb {H}^n\), there are two important groups of automorphisms; the first one is the left translation with a fixed \(q \in \mathbb {H}^n\),
and the second one is the (1-parameter) group of the anisotropic dilations \(\delta _r\), with \(r>0\):
On the Heisenberg group \(\mathbb {H}^n\), we can define different equivalent distances: the Korányi and the Carnot–Carathéodory distance.
Definition 2.2
We define the Korányi distance on \(\mathbb {H}^n\) by setting, for \(p,q \in \mathbb {H}^n\),
where \( \left\Vert \cdot \right\Vert _{\mathbb {H}}\) is the Korányi norm \( \left\Vert (x,y,t)\right\Vert _{\mathbb {H}}:=\left( |(x,y)|^4+16t^2 \right) ^{\frac{1}{4}}, \) with \((x,y,t) \in \mathbb {R}^{2n} \times \mathbb {R} \) and \(| \cdot |\) being the Euclidean norm.
The Korányi distance is left invariant, meaning \( d_{\mathbb {H}} (p*q,p*q')=d_{\mathbb {H}} (q,q')\) for \(p,q,q' \in \mathbb {H}^n, \) and homogeneous of degree 1 with respect to \(\delta _r\), meaning \( d_\mathbb {H} \left( \delta _r (p), \delta _r (q) \right) = r d_{\mathbb {H}} (p,q) \), for \( p,q \in \mathbb {H}^n\) and \( r>0. \) Furthermore, the Korányi distance is equivalent to the Carnot–Carathéodory distance \(d_{cc}\), which is measured along curves whose tangent vector fields are horizontal.
2.2 Left Invariance and Horizontal Structure on \(\mathbb {H}^n\)
The standard basis of vector fields in the Heisenberg group \(\mathbb {H}^n\) gives it the structure of a Carnot group.
Definition 2.3
The standard basis of left invariant vector fields in \(\mathbb {H}^n\) consists of the following:
One can observe that \(\{ X_1,\dots ,X_n,Y_1,\dots ,Y_n,T \}\) becomes \(\{ \partial _{x_1},\dots , \partial _{x_n}, \partial _{y_1},\dots ,\partial _{y_n},\) \(\partial _{t} \}\) at the origin. Another easy observation is that the only non-trivial commutators of the vector fields \(X_j,Y_j\) and T are \( [X_j,Y_j]=T \), for \(j=1,\dots ,n. \) This immediately tells that all higher-order commutators are zero and that the Heisenberg group is a Carnot group of step 2. Indeed we can write its Lie algebra \(\mathfrak {h}\) as \( \mathfrak {h} =\mathfrak {h}_1 \oplus \mathfrak {h}_2, \) with
Conventionally one denotes as \(\mathfrak {h}_1\) the space of horizontal and \(\mathfrak {h}_2\) the space of vertical vector fields. Similarly, one denotes a map horizontal when its tangent vector fields are horizontal. The vector fields \(\{ X_1,\dots ,X_n,Y_1,\dots ,Y_n\}\) are homogeneous of order 1 with respect to the dilation \(\delta _r, \ r \in \mathbb {R}^+\), i.e.,
where \(f \in C^1 (U, \mathbb {R} )\), \(U\subseteq \mathbb {H}^n\) open and \(j=1,\dots ,n\). On the other hand, the vector field T is homogeneous of order 2, i.e.,
The vector fields \(X_1,\dots ,X_n,Y_1,\dots ,Y_n,T\) form an orthonormal basis of \(\mathfrak {h}\) with a scalar product \(\langle \cdot , \cdot \rangle \). In the same way, \(X_1,\dots ,X_n,Y_1,\dots ,Y_n\) form an orthonormal basis of \(\mathfrak {h}_1\) with a scalar product \(\langle \cdot , \cdot \rangle _H \) defined purely on \(\mathfrak {h}_1\).
Note that, following 2.1 in [5] and 1.2 [6], when in Definition 2.1, we identify \(\mathbb {H}^n \) with \( \mathbb {R}^{2n+1}\), we do so by denoting a point in the Lie algebra as follows:
and by identifying \( ( x_1, \ldots x_n, y_1 \ldots , y_n, t) \in \mathbb {R}^{2n+1}\) with \(\exp (x_1 X_1 + \ldots +x_n X_n + y_1 Y_1+ \ldots + y_n Y_n + t T) \in \mathbb {H}^n\), where \(\exp \) is the exponential map (see, for instance, [3])
where the map \(\gamma (t):= \gamma (t, V, 0_{\mathbb {H}^n})\) denotes the maximal solution of
We denote these exponential coordinates and use the notation \( ( x_1, \ldots x_n, y_1 \ldots , y_n,\) \(t) \in \mathbb {H}^n\). By, for example, Theorem 1.2.1 in [6], we notice that \(\exp \) is a diffeomorphism and we denote its inverse as the logarithmic map \(\log \).
Notation 2.4
Sometimes it will be useful to consider all the elements of the basis of \(\mathfrak {h}\) with one symbol; to do so, we write
In the same way, the point \((x_1,\dots ,x_n,y_1,\dots ,y_n,t)\) will be denoted as \((w_1,\dots ,w_{2n+1})\).
Notation 2.5
Remember Notation 2.4 and let \(j=1,\dots ,2n\). Define
Then we have that
Next we give the definition of Pansu differentiability for maps between two Carnot groups \(\mathbb {G}\) and \(\mathbb {G}'\). After that, we state it in the special case of \(\mathbb {G}=\mathbb {H}^n\) and \(\mathbb {G}'=\mathbb {R}\).
We denote a function \(h: (\mathbb {G},*,\delta ) \rightarrow (\mathbb {G}',*',\delta ')\) homogeneous if \(h(\delta _r(p))= \delta '_r \left( h(p) \right) \) for all \(r>0\).
Definition 2.6
(see [13] and 2.10 in [8]) Consider two Carnot groups \((\mathbb {G},*,\delta )\) and \((\mathbb {G}',*',\delta ')\). A function \(f: U \rightarrow \mathbb {G}'\), \(U \subseteq \mathbb {G}\) open, is P-differentiable at \(p_0 \in U\) if there is a (unique) homogeneous Lie group homomorphism \(d_H f_{p_0}: \mathbb {G} \rightarrow \mathbb {G}'\) such that
uniformly for p in compact subsets of U.
Definition 2.7
Consider a function \(f: U \rightarrow \mathbb {R}\), \(U \subseteq \mathbb {H}^n\) open. f is P-differentiable at \(p_0 \in U\) if there is a (unique) homogeneous Lie group homomorphism \(d_H f_{p_0}: \mathbb {H}^n \rightarrow \mathbb {R}\) such that
uniformly for p in compact subsets of U.
Consider again a function \(f:U \rightarrow \mathbb {H}^n\), \(U\subseteq \mathbb {H}^n\) open, and interpret \(\mathbb {H}^n = \mathbb {R}^{2n+1}\) and f in components as \(f=(f^1,\dots ,f^{2n+1})\), \(f^j:U \rightarrow \mathbb {R}\), \(j=1,\dots ,2n+1\). A straightforward computation shows that, if f is P-differentiable in the sense of Definition 2.6, then \(f^1,\dots ,f^{2n}\) are P-differentiable in the sense of Definition 2.7.
Definition 2.8
(see 2.11 in [8]) Consider a function f P-differentiable at \(p \in U\), \(f:U \rightarrow \mathbb {R}\), \(U\subseteq \mathbb {H}^n\) open. The Heisenberg gradient or horizontal gradient of f at p is defined as follows:
or, equivalently,
Notation 2.9
(see 2.12 in [8]) Sets of differentiable functions can be defined with respect to the P-differentiability. Consider \( U \subseteq \mathbb {G}\) and \(V \subseteq \mathbb {G}'\) open, then \(C_{\mathbb {H}}^1 (U, V)\) is the function space of continuous functions \(f:U \rightarrow V \) such that the P-differential \(d_H f\) is continuous. \([C_{\mathbb {H}}^1(V,U)]^{k} \) is the set of k-uples \(f = \{ f_1, \dots , f_k \}\) such that each \(f_i \in C_{\mathbb {H}}^1 (U, V)\) for \(i = 1, \dots , k \).
Finally we give some definitions of regularity for surfaces.
Definition 2.10
(see 3.1 in [8]) Let \(1\le k \le n\). A subset \(S \subseteq \mathbb {H}^n\) is a \(\mathbb {H}\)-regular k-dimensional surface if for all \(p \in S\), there exists a neighborhood \( U \in \mathcal {U}_p\), an open set \( V \subseteq \mathbb {R}^k\) and a injective mapping \(\varphi : V \rightarrow U\), \( \varphi \in [C_{\mathbb {H}}^1(V,U)]^{2n+1} \) with \(d_H \varphi \) injective such that \( S \cap U = \varphi (V)\).
Definition 2.11
(see 3.2 in [8]) Let \(1\le k \le n\). A subset \(S \subseteq \mathbb {H}^n\) is a \(\mathbb {H}\)-regular k-codimensional surface if for all \( p \in S \) there exists a neighborhood \( U \in \mathcal {U}_p\) and a mapping \( f: U \rightarrow \mathbb {R}^k\), \( f \in [C_{\mathbb {H}}^1(U,\mathbb {R}^k)]^k\), such that \( {\nabla _\mathbb {H} f_1} \wedge \dots \wedge {\nabla _\mathbb {H} f_k} \ne 0 \) on U and \( S \cap U = \{ f=0 \} \).
3 An Example of \(\pmb {\mathbb {H}}\)-Regular Grid in \(\pmb {\mathbb {H}}^n\)
In this section, we show an example of grid on the Heisenberg group \(\mathbb {H}^n\), with \(n \ge 1\), composed by \(\mathbb {H}\)-regular k-codimensional surfaces on the first two high-dimensional layers of the grid, except of course in the case of \(n=1\) which has only one high-dimensional layer. The \(\mathbb {H}\)-regularity of the faces makes them invariant under left translations and anisotropic dilations. Nevertheless, this grid is limited because we cannot choose points to be vertices, but we are constrained by the side length of the faces and the starting point. Another limit is that, a priori, we do not know whether this grid can support some regularity at each dimension, or get associated with a triangulation (simplicial complex) of the space \(\mathbb {H}^n\).
Definition 3.1
Consider a point \(p \in \mathbb {H}^n\) and \(\epsilon > 0\) small. We define a cube with starting vertex as p and side length \(\epsilon \), and we write \(Q_{ p, \epsilon }\), as follows:
The reason for defining a cube starting from a vertex will be apparent later when we will consider a cube starting from the origin, and it will be convenient to have the origin as a vertex instead than, for example, as the center of the cube.
Consider now a similar cube with starting vertex \(\epsilon p\) and side length \(\epsilon \):
with \(\epsilon > 0\) and \(p \in \mathbb {Z}^{2n+1}\).
Lemma 3.2
Consider a cube \( Q_{\epsilon p, \epsilon }\) with starting vertex \(\epsilon p\) and side length \(\epsilon \), \(p \in \mathbb {Z}^{2n+1}\), \(\epsilon > 0\). By construction, we get that
and
The cubes \( Q_{\epsilon p, \epsilon }\)’s form a grid for the Heisenberg group \(\mathbb {H}^n\). For such cubes, we can give the following proposition.
Proposition 3.3
Consider any cube \(Q_{\epsilon p, \epsilon }\) with starting vertex \(\epsilon p\) and side length \(\epsilon \), \(p \in \mathbb {Z}^{2n+1}\), \(\epsilon > 0\). The interior of each face of \(Q_{\epsilon p, \epsilon }\) is a \(\mathbb {H}\)-regular 1-codimensional surface.
Moreover, each face is a \(\mathbb {H}\)-regular 1-codimensional surface unless the face both is (Euclidean) perpendicular to the t-axis and intersects the t-axis itself.
Proof
The cube \(Q_{\epsilon p, \epsilon }\) has \(2(2n+1)\) different faces and, given \(j \in \left\{ 1, \dots , 2n+1 \right\} \), we can group them into two families as \(F_{j}\)’s and \(E_{j}\)’s, with
and
Indeed, \( \bigcup _{j=1}^{2n+1} \left( F_j \cup E_j \right) = \partial Q_{\epsilon p, \epsilon }. \) For each \(j \in \left\{ 1, \dots , 2n+1 \right\} \), we define two functions:
It follows by their definitions that \(F_{j} \subseteq \{ f_{j}=0 \}\) and \(E_{j} \subseteq \{ g_{j}=0 \}\) for all \(j \in \left\{ 1, \dots , 2n+1 \right\} \).
Consider now two cases: \(j \in \left\{ 1, \dots , 2n \right\} \) and \(j= 2n+1 \). In the first case, we let \(j=1,\dots ,2n\) and, recalling Notation 2.5, we write that
and
This implies that \(\nabla _{\mathbb {H}} f_{j} = \sum _{i=1}^{2n} W_i f_j W_i \ne 0\) and, likewise, \(\nabla _{\mathbb {H}} g_{j} \ne 0\) on \(\mathbb {H}^n\) for all \(j\in \left\{ 1, \dots , 2n \right\} \). By Definition 2.11, it follows that \(F_{j}\) and \(E_{j}\) are \(\mathbb {H}\)-regular 1-codimensional surfaces for \(j\in \left\{ 1, \dots , 2n \right\} \).
In the second case, we let \(j=2n+1\). This time for \(i \in \left\{ 1, \dots , 2n+1 \right\} \) and we get that
and
We see that the horizontal gradients \(\nabla _{\mathbb {H}} f_{2n+1}\) and \(\nabla _{\mathbb {H}} g_{2n+1}\) vanish only on the t-axis, where \(w_i=0\) for \(i=1,\dots ,2n\). Moreover, from the way, we designed our grid, the t-axis can intersect the faces \(F_{2n+1}\) and \(E_{2n+1}\) only at their border.
Denoting the interior sets of \(F_{2n+1}\) and \(E_{2n+1}\) as \(F_{2n+1}^{\textrm{o}}\) and \(E_{2n+1}^{\textrm{o}}\), respectively, we can say that \(\nabla _{\mathbb {H}} f_{2n+1} = \sum _{i=1}^{2n} W_i f_{2n+1} W_i \ne 0\) on \(F_{2n+1}^{\textrm{o}}\) and \(\nabla _{\mathbb {H}} g_{2n+1} \ne 0\) on \(E_{2n+1}^{\textrm{o}}\) respectively. By Definition 2.11, the interior sets \(F_{2n+1}^{\textrm{o}}\) and \(E_{2n+1}^{\textrm{o}}\) are \(\mathbb {H}\)-regular 1-codimensional surfaces. Moreover, if the faces do not intersect the t-axis, with the same argument \(F_{2n+1}\) and \(E_{2n+1}\) are \(\mathbb {H}\)-regular 1-codimensional surfaces, and this proves the claim. \(\square \)
Moreover, the borders of the faces \(F_j\)’s and \(E_j\)’s are surfaces on their own and with their own regularity, as follows.
Proposition 3.4
Consider \(n > 1\) and \(Q_{\epsilon p, \epsilon }\) any cube with starting vertex \(\epsilon p\) and side length \(\epsilon \), \(p \in \mathbb {Z}^{2n+1}\), \(\epsilon > 0\). Furthermore, consider any of its faces, divided into its own subfaces. The interior of each subface is a \(\mathbb {H}\)-regular 2-codimensional surface.
Moreover, each subface is a \(\mathbb {H}\)-regular 2-codimensional surface unless the face both is (Euclidean) perpendicular to the t-axis and intersects the t-axis itself.
Note that there is no equivalent to Proposition 3.4 for \(n=1\). Indeed, an equivalent results would need to consider (instead of 2-codimensional surfaces) 1-dimensional surfaces as in Definition 2.10, which are horizontal continuously differentiable curves. On the contrary, the 1-dimensional subsurfaces of \(Q_{\epsilon p, \epsilon } \subseteq \mathbb {H}^1\) are simply segments, not necessarily horizontal.
Proof
Consider a cube \(Q_{\epsilon p, \epsilon }\) with starting vertex \(\epsilon p\) and side length \(\epsilon \), \(p \in \mathbb {Z}^{2n+1}\), \(\epsilon > 0\), and its faces \(F_j\)’s and \(E_j\)’s, \(j \in \left\{ 1, \dots , 2n+1 \right\} \), as in the proof of Proposition 3.3. By construction, the boundary of a 1-codimensional face can itself be naturally written as the union of 4n subfaces.
Fix \(j \in \left\{ 1, \dots , 2n+1 \right\} \) and consider \(k \in \left\{ 1, \dots , 2n+1 \right\} \) with \(k \ne j\). The boundary pieces of \(F_j\) can be grouped into two families as \(F_{k, F_j}\)’s and \(E_{k, F_j}\)s:
and
Likewise, the boundary pieces of \(E_j\) can be written as \(F_{k, E_j}\)’s and \(E_{k, E_j}\)’s:
and
Indeed \( \bigcup _{\begin{array}{c} k=1 \\ k\ne j \end{array}}^{2n+1} \left( F_{k, F_j} \cup E_{k, F_j} \right) = \partial F_j \) and \( \bigcup _{\begin{array}{c} k=1 \\ k\ne j \end{array}}^{2n+1} \left( F_{k, E_j} \cup E_{k, E_j} \right) = \partial E_j. \) For simplicity, we consider \(F_{k, F_j}\) to fix the idea. We define the function
for which we have that \( F_{k, F_j} = \left\{ h = 0 \right\} \).
Consider now different cases. In the first case, we take \(j,k \in \left\{ 1, \dots , 2n \right\} \), \(k \ne j\) and we have that
Thus,
By Definition 2.11, it follows that \(F_{k, F_j}\) is a \(\mathbb {H}\)-regular 1-codimensional surfaces for \(j,k \in \left\{ 1, \dots , 2n \right\} \), \(k \ne j\).
As a second case, we keep \(j \in \left\{ 1, \dots , 2n \right\} \) and consider the case of \(k=2n+1\). Consequently, as above we get
and then
where
The wedge \(\nabla _{\mathbb {H}} h^1 \wedge \nabla _{\mathbb {H}} h^2 \) vanishes only on the t-axis, where \(w_i=0\) for \(i=1,\dots ,2n\). Moreover, from the way, we designed our grid, the t-axis can intersect the face \(F_{2n+1, F_j}\) only at its borders.
Then we can denote the interior set of \(F_{2n+1, F_j}\) as \(F_{2n+1, F_j}^{\textrm{o}}\) and say that \(\nabla _{\mathbb {H}} h^1 \wedge \nabla _{\mathbb {H}} h^2 \ne 0\) on \(F_{2n+1, F_j}^{\textrm{o}}\). By Definition 2.11, the interior set \(F_{2n+1, F_j}^{\textrm{o}}\) is a \(\mathbb {H}\)-regular 2-codimensional surface. Moreover, if the face does not intersect the t-axis, with the same argument \(F_{2n+1, F_j}\) is a \(\mathbb {H}\)-regular 2-codimensional surfaces.
Although k and j are not symmetrical in their geometrical meaning (we denoted a 1-codimensional face as \(F_j\) and a 2-codimensional face as \(F_{k, F_j}\)), in the proof, their role is interchangeable and the same follows if we consider \(j=2n+1\) with \(k \in \left\{ 1, \dots , 2n \right\} \). This proves the claim. \(\square \)
4 A Triangulation of the Heisenberg Group \(\pmb {\mathbb {H}}^n\)
In this section, we show a triangulation of the Heisenberg group with some regularity properties. In Subsect. 4.1, we present a quick introduction and notations for singular k-simplexes, their faces, and boundary. In Subsect. 4.2, we define straight simplexes, which we use to construct simplexes with horizontality properties on low dimensions and linear combinations of straight layers on high dimensions. In Subsect. 4.3 we give a notion of triangulation for polyhedrons and, subsequently, for the whole Heisenberg group as well.
4.1 Simplexes in \(\pmb {\mathbb {H}}^n\)
In this subsection, we present a quick introduction and notations for singular k-simplexes, their faces, and boundary. The main source for this part is the book of Maunder [12].
Definition 4.1
Let \(k \in \mathbb {N}\) and denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\) with vertices \(e_0=(1,0,\dots ,0)\), ..., \(e_k=(0,\dots ,0,1)\), meaning that we have
Note that if we have \(\Delta ^{k-1}, \Delta ^k \in \mathbb {R}^{k+1}\), it immediately follows that
For example,
Definition 4.2
(see 4.2.1-2 in [12]) Let \(k \in \mathbb {N}\) and denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\) with vertices \(e_0=(1,0,\dots ,0)\), ..., \(e_k=(0,\dots ,0,1)\). We define a singular k-simplex in \(\mathbb {H}^n\) as a continuous map from the standard k-simplex to the Heisenberg group:
Definition 4.3
(see 4.2.3 in [12] and pp. 244, 340 in [11]) Let X be a topological space and \(k \in \mathbb {N}\), \(k>0\). We define the \(k^{th}\) singular chain group of X, and we denote it \(S_k(X)\), as the free abelian group with the singular k-simplexes in X as generators. Elements of \(S_k(X)\) are formal linear combinations of singular k-simplexes with integer coefficients, where “formal” refers to the structure of \(S_k(X)\) as a free abelian group (see p. 340 in [11]).
The restriction of a singular k-simplex \(\sigma ^k: \Delta ^k \rightarrow \mathbb {H}^n\) to \(\Delta ^{k-1}\) is a singular \((k-1)\)-simplex. Indeed, the boundary of a k-simplex can be defined as the sum of \((k-1)\)-simplexes as follows:
Definition 4.4
(see 4.2.4 and 2.4.5 in [12]) Consider \(k>0\) and \(0 \le i \le k\). The \(i^{th}\) face map \(F^i: \Delta ^{k-1} \rightarrow \Delta ^k\) is the element of \(S_{k-1}(\Delta ^k)\) which lands on the face of \(\Delta ^k\) delimited by the vertices (\(e_0, \dots , \hat{e}_i, \dots , e_k\)), where the hat notation \(\ \hat{} \ \) means that that vertex has been omitted. Now let \( \sigma ^k: \Delta ^k \rightarrow \mathbb {H}^n\) be a k-simplex and define its boundary as follows:
One can write
where \(\sigma _i^{k-1}\) becomes the singular (since it is the composition of continuous functions) \((k-1)\)-simplex restriction of \(\sigma ^k\) to \(\Delta ^{k-1}\) that acts as \( \sigma ^k\) on the \(i^{th}\) face of \( \Delta ^{k}\).
Lemma 4.5
(see 4.2 in [12]) The operator \(\partial \) extends to a boundary homomorphism
Furthermore, the pair \(( S_k(\mathbb {H}^n), \partial )\) is a chain complex.
By definition, the boundary of a singular k-chain is the linear combination of the boundaries of its simplexes.
4.2 Straight and Horizontal Simplexes in \(\pmb {\mathbb {H}}^n\)
In this subsection, we define special singular simplexes, called straight simplexes, and we use them to construct other simplexes with horizontality properties on low dimensions and linear combinations of straight layers on high dimensions. The main ideas and concepts are based on and expanded from Subsections 2.1 and 5.4 of the preprint [2].
Definition 4.6
Let \(k \in \mathbb {N}\), denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\) with vertices \(e_0=(1,0,\dots ,0)\), ..., \(e_k=(0,\dots ,0,1)\) and consider \(k+1\) points \(p_0, \dots , p_k \in \mathbb {H}^n\). We define the straight k-simplex
iteratively as follows. As \(0^{th}\) step, we define the map
which sends \(e_0\) to \(p_0 \in \mathbb {H}^n\). For \(1 \le j \le k\), the \(j^{th}\) step consists of three parts:
-
(1)
consider the map \( \sigma _{p_0, \dots , p_{j-1}}: \Delta ^{j-1} \rightarrow \mathbb {H}^n \) from the previous step so that
$$\begin{aligned} \sigma _{p_0, \dots , p_{j-1}} (e_l) = p_l, \quad \text {for } l =0,\dots , j-1 \end{aligned}$$and a point \(p_j \in \mathbb {H}^n\). Define a new map:
$$\begin{aligned} \bar{\Gamma }: = \log \circ \tau _{p_j^{-1}} \circ \sigma _{p_0, \dots , p_{j-1}}: \Delta ^{j-1} \rightarrow \mathfrak {h} \end{aligned}$$where
-
\(\tau _q: \mathbb {H}^n \rightarrow \mathbb {H}^n \) is the left translation with respect to the point \(q \in \mathbb {H}^n\),
-
\(\log : \mathbb {H}^n \rightarrow \mathfrak {h}\) is the logarithmic map defined in Subsect. 2.2,
-
-
(2)
extend \(\bar{\Gamma }: \Delta ^{j-1} \rightarrow \mathfrak {h}\) to a continuous map \(\Gamma : \Delta ^{j} \rightarrow \mathfrak {h}\) on the affine cone with vertex at \(0 \in \mathfrak {h}\) and base \(\bar{\Gamma }(\Delta ^{j-1} )\),
-
(3)
apply the exponential map \(\exp : \mathfrak {h} \rightarrow \mathbb {H}^n\) and \(\tau _{p_j}: \mathbb {H}^n \rightarrow \mathbb {H}^n\) in order to finish the construction of \(\sigma _{p_0, \dots , p_j}\):
$$\begin{aligned} \sigma _{p_0, \dots , p_j}: =\tau _{p_j} \circ \exp \circ \Gamma : \Delta ^{j} \rightarrow \mathbb {H}^n. \end{aligned}$$
Note that in Definition 4.6, in the \(j^{th}\) step:
-
in part (1), we obtain a set \(\bar{\Gamma }\left( \Delta ^{j-1} \right) \subseteq \mathfrak {h}\), which is at most \(j-1\) dimensional in \(\mathfrak {h}\).
-
in part (2), the image of \(\Gamma \) is a cone \(\mathcal {C}\) on \(\mathfrak {h}\), which can be parametrized as follows:
$$\begin{aligned} \mathcal {C}&= \left\{ \Gamma ( s_1, \dots , s_j, 1 - s_1 - \dots - s_j ) \ / \ s_1, \dots , s_{j} \ge 0, \ s_1 + \dots + s_{j} \le 1 \right\} . \end{aligned}$$with vertices: \(0, \ \log \left( p_j^{-1} * p_0 \right) , \ \dots , \ \log \left( p_j^{-1} * p_{j-1} \right) .\)
-
in part (3), the image \(\sigma _{p_0, \dots , p_j} ( \Delta ^{j} ) \) has, as expected, vertices \(p_0, \dots , p_j\).
Lemma 4.7
Straight k-simplexes are also singular k-simplexes.
Proof
Straight simplexes are continuous by construction and so they are also singular. \(\square \)
Notation 4.8
Given Lemma 4.7, we can write the boundary of a straight k-simplex \( \sigma _{p_0, \dots , p_k}\) as follows:
where \(\sigma _{p_0, \dots , {\hat{p}}_i, \dots , p_k}:= \sigma _{p_0, \dots , p_k} \circ F^i\) is the singular \((k-1)\)-simplex restriction of \( \sigma _{p_0, \dots , p_k}\) to \(\Delta ^{k-1}\) that acts as \( \sigma _{p_0, \dots , p_k}\) on the \(i^{th}\) face of \( \Delta ^{k}\).
Similarly we take \(I \subseteq \{0,\dots , k\}\), a singular k-simplex \( \sigma _{p_0, \dots , p_k}\), and we shall denote \(\sigma _{p_0, \dots , {\hat{p}}_I, \dots , p_k} \) the singular \((k-|I|)\)-simplex restriction of \( \sigma _{p_0, \dots , p_k}\) to \(\Delta ^{k-|I|}\) that acts as \( \sigma _{p_0, \dots , p_k}\) on the subface of \( \Delta ^{k}\) restricted by the indexes in I.
Lemma 4.9
Each boundary piece \( \sigma _{p_0, \dots , {\hat{p}}_i, \dots , p_k}\) of a straight k-simplex \(\sigma _{p_0, \dots , p_k}\) is a straight \((k-1)\)-simplex.
Proof
Consider \( \gamma ^{(k-1)} = \sigma _{p_0, \dots , p_k} \circ F^i\) where \( \sigma _{p_0, \dots , p_k}\) is a straight k-simplex. In order to prove that \( \gamma ^{(k-1)}: \Delta ^{k-1} \rightarrow \mathbb {H}^n\) is a straight simplex, we need to show that it can be constructed following Definition 4.6. In this case, its \(0^{th}\) step is \(k-1=0\), and thus, we get \(\gamma ^{(0)} = \sigma _{p_0, p_1} \circ F^i: \Delta ^{0} = \{1\} \rightarrow \mathbb {H}^n\), with \(i \in {0,1}\). \(F^i\) sends 1 to the vertex of \(\Delta ^{1}\) of index not i. Namely, for \(i = 0\),
or, for \(i = 1\),
For the \(j^{th}\) step, we take \(\gamma ^{(j-1)} = \sigma _{p_0, \dots , p_{j-1}} \circ F^i: \Delta ^{j-2} \rightarrow \Delta ^{j-1} \rightarrow \mathbb {H}^n\) with \(i \in \{0,\dots ,j-1\}\). We know that \( \gamma ^{(j-1)} = \sigma _{p_0, \dots , p_{j-1}} \circ F^i\) reaches the \(j-1\) points \(p_0, \dots , \hat{p}_i, \dots , p_{j-1}\), and we are going to add the point \( p_j\). We define
where \( \bar{\Gamma }\) comes from the \(j^{th}\) step of the construction of \(\sigma _{p_0, \dots , p_{k}}\). From the same construction, we also get the map \( \Gamma : \Delta ^{j} \rightarrow \mathfrak {h}\) and we use it to define the continuous map
which extends \(\bar{\Gamma }_\gamma \) in the same way as \(\Gamma \) extends \(\bar{\Gamma }\). Finally we take \( \tau _{ p_i} \circ \exp \circ \Gamma _\gamma : \Delta ^{j} \rightarrow \mathbb {H}^n \), and we see that
So the construction is completed, \(\gamma ^{(k-1)} = \sigma _{p_0, \dots , p_{k}} \circ F^i \) is indeed a straight simplex and this completes the claim. \(\square \)
Definition 4.10
Let \(k \in \mathbb {N}\), denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\) and consider a singular \((k-1)\)-simplex \( \sigma ^{k-1}: \Delta ^{k-1} \rightarrow \mathbb {H}^n \) with vertices \(p_0, \dots , p_{k-1} \in \mathbb {H}^n\). By applying the \(j^{th}\) step of Definition 4.6 to \( \sigma ^{k-1}\) with a point \(p_k \in \mathbb {H}^n \), we obtain a singular k-simplexes
for which we say that the k-layer of \(\sigma _{p_0, \dots , p_{k}}\) is straight.
Note that the crucial difference here is that a straight simplex has all of its layers straight by construction, while a singular simplex with one straight layer says nothing about the other layers.
Definition 4.11
Let \(\Delta ^k\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\) and consider a singular k-simplex \(\sigma ^{k} \). We say that \(\sigma ^{k}\) is a horizontal k-simplex if its image is horizontal in \( \mathbb {H}^n\), meaning that the tangent vector fields are horizontal. Singular k-chains composed of horizontal k-simplexes are called horizontal k-chains.
Notice that the spaces of horizontal k-simplexes and horizontal k-chains are both invariant under dilation \(\delta _r\) and left translation.
Definition 4.12
Consider \(n \in \mathbb {N}\) and define the dilation group (or group of dilations) as
and the orbits of the dilation group as
Furthermore, we say that p and q are on same orbit, and we write \(p \sim q \), if and only if
This also mean that, if \(p, q \ne 0\),
Notation 4.13
(see 2.1 in [2]) We denote by \(PL( \Delta ^k, \mathbb {H}^n)\) the set of piecewise linear functions from \(\Delta ^k\) to \(\mathbb {H}^n\), where \(\mathbb {H}^n\) behaves as a vector space with respect to the exponential coordinates.
In the proofs of Proposition 4.14 and Proposition 4.15 we will handle different k-simplexes and so use a notation to distinguish between their domains. For instance, 2-simplexes of the kind \(\sigma _{p_1, p_2}^h, \ \sigma _{ e, p_2}^h, \ \sigma _{e, p_1}^h \) will have domains written as \( \Delta _{(p_1, p_2 )}^1, \ \Delta _{(p_2, e )}^1, \ \Delta _{(e, p_1 )}^1 \) instead of \( \Delta ^1\).
Proposition 4.14
(see Lemma 17 in [2]) Let \(\Delta ^k\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\) and \(p_0, \dots , p_k \in \mathbb {H}^1\). There exist continuous maps
such that, for each \(\sigma _{p_0, \dots , p_k}^h: \Delta ^k \rightarrow \mathbb {H}^1\),
-
(1)
\(\sigma _{p_0, \dots , p_k}^h\) is a singular simplex with vertices \(p_0, \dots , p_k\),
-
(2)
if \(k\ge 1\), the faces and subfaces of \(\sigma _{p_0, \dots , p_k}^h\) are singular simplexes with vertices \(p_0, \dots , \hat{p}_I, \dots , p_k\), \(I \subseteq \{ 0, \dots , k\}\).
Moreover,
-
(3)
if \(k \ge 1\), for \(i_0, i_1 \in \{ 0, \dots , k\}\), \(i_0 < i_1\), \(\sigma _{p_{i_0}, p_{i_1}}^h\)’s are horizontal piecewise linear curves.
-
(4)
if \(k \in \{2, 3\}\), for \(2 \le j \le k\) and \(i_0, \dots , i_j \in \{ 0,\dots , k \} \), \(i_0< \dots < i_j \), \(\sigma _{p_{i_0}, \dots , p_{i_j}}^h\) is a linear combination of singular simplexes with straight j-layers.
We can say that \(\sigma ^h\) is \(\delta _r\)-equivariant and \(\tau _q\)-equivariant in the sense that, chosen some points \(p_0, \dots , p_k\), \(\delta _r \circ \sigma _{p_0, \dots , p_k}^h \) and \(\tau _q \circ \sigma _{p_0, \dots , p_k}^h \) still satisfy the four points.
The following proof uses a contact argument by Gromov (3.4.B of [10]). A deeper reading on the topic can be found in 3.5 and 4.2 in [10] or 3.4.3 in [9], also by Gromov. Another reference on the subject of horizontal triangulations is Sect. 4 in [14], which shows two families of examples of groups with horizontal maps and triangulations.
Proof
Points (1) and (2) of the proposition derive immediately by the methods used to prove the following points. If \(k=0\), the claim is trivial. If \(k\ge 1\), consider the point \(p_1 \in \mathbb {H}^1\) and let \(U \subseteq \mathbb {H}^1\) be a polyhedron containing the origin e in its interior and intersecting each non-trivial orbit of the dilation group, as by Definition 4.12, exactly once. By applying 3.4.B in [10] or Lemma 4.13 in [14], we can say that, there exists a function
such that \( \sigma _{e, p_1}^h: \Delta ^1 \rightarrow \mathbb {H}^1\) is a piecewise linear horizontal map that joins e to \(p_1\). By dilating and left translating, we define a continuous map
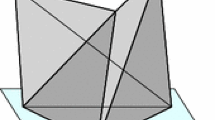
which completes the claim for \(k=1\). For \(k=2\), similarly we continue and take a different point \(p_2 \in U\), \(p_2 \not \in \partial U\), \(p_2\) not on the same dilation group orbit as \(p_1\) (possible thanks to the definition of U) and we get \( \sigma _{ p_1, p_2}^h, \sigma _{e, p_2}^h \in PL(\Delta ^1, \mathbb {H}^n )\) horizontal maps. This satisfies point (3) for \(k=2\). Notice that we can consider the map \(\partial \Delta ^2 \rightarrow \mathbb {H}^1 \) defined by \( \sigma _{e, p_1}^h, \sigma _{ p_1, p_2}^h, \sigma _{e, p_2}^h\) along the border of \(\Delta ^2\):
and this works perfectly as the border of a 2-simplex. In order to construct such 2-simplex, we take the exponential center of gravity
and we extend all three simplexes \( \sigma _{e, p_1}^h, \sigma _{ p_1, p_2}^h, \sigma _{e, p_2}^h\) following exactly the \(j^{th}\) step of the construction in Definition 4.6. Hence we obtain three singular 2-simplexes with straight 2-layers (see Definition 4.10).
These three simplexes have the vertex q in common and they all share, two by two, a second vertex as well. Since the construction is exactly the same for all of them, this means that they also perfectly touch on their new borders, meaning that \(\sigma _{p_1, p_2, q}^h = \sigma _{e, p_2, q}^h \) on the part of \(\partial \Delta ^2\) that joins \(p_2\) to q, and same for the others.
This means that we can define a new 2-simplex \(: \Delta ^2 \rightarrow \mathbb {H}^1\) where \( \Delta ^2\) is divided in three triangles by its center of gravity \(\left( \frac{1}{3}, \frac{1}{3}, \frac{1}{3} \right) \in \Delta ^2\) and each of these three triangles is sent to one of the 2-simplexes \(\Delta _{(*,*,*)}^2\)’s in a natural way, with \(\left( \frac{1}{3}, \frac{1}{3}, \frac{1}{3} \right) \) pointing at q. Hence we obtain a new map
which is a 2-simplex with vertices \(e, p_1, p_2\). By dilating and left translating, we define a continuous map
which completes the claim for \(k=2\). For \(k=3\), one can work in the same way and so first obtain six horizontal singular 1-simplexes of the kind \( \sigma _{p_i, p_j}^h: \Delta ^1 \rightarrow \mathbb {H}^1\), with \(i, j \in \{0,1,2,3\}\), satisfying point (3) for \(k=3\). Then we obtain four singular 2-simplexes with straight 2-layers: \( \sigma _{p_i, p_j, p_l}^h: \Delta ^2 \rightarrow \mathbb {H}^1\), with \(i, j, l \in \{0,1,2,3\}\). At this point one can see that the map
works perfectly as the border of a 3-simplex. Again we build this 3-simplex by taking the center of gravity
and by extending all four simplexes \( \sigma _{p_i, p_j, p_l, p_m}^h\) by one dimension following exactly the \(j^{th}\) step of the construction in Definition 4.6. Hence we obtain four singular 3-simplexes with straight 3-layers
All these simplexes have the vertex q in common and they all share, two by two, two other vertices as well. Since the construction is exactly the same for all of them, this means that they also perfectly touch on their new borders, meaning that \(\sigma _{p_1, p_2, p_3, q}^h = \sigma _{p_0, p_2, p_3, q}^h \) on the part of \(\partial \Delta ^3\) that joins \( \sigma _{ p_2, p_3}^h \) to q, and same for the others.
This means that we can define a new 3-simplex \(: \Delta ^3 \rightarrow \mathbb {H}^1\) where \( \Delta ^3\) is divided in four tetrahedra by its center of gravity \(\bar{q} \in \Delta ^3\) and each of these four tetrahedra is sent to one of the 3-simplexes \(\Delta _{(*,*,*,*)}^3\)’s in a natural way, with \(\bar{q}\) pointing at q. Hence we obtain a new map
which is a 3-simplex with vertices \(p_0, p_1, p_2, p_3\). By dilating and left translating, we define a continuous map
which completes the claim for \(k=3\) and finishes the proof. \(\square \)
Proposition 4.15
Let \(\Delta ^{k}\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\). There exist continuous maps
such that, for each \(\sigma _{p_0, \dots , p_k}^h: \Delta ^k \rightarrow \mathbb {H}^n\),
-
(1)
\(\sigma _{p_0, \dots , p_k}^h\) is a singular simplex with vertices \(p_0, \dots , p_k \in \mathbb {H}^n\),
-
(2)
if \(1 \le k \le 2n+1\), the faces and subfaces of \(\sigma _{p_0, \dots , p_k}^h\) are \(\sigma _{p_0, \dots , \hat{p}_I, \dots , p_k}^h\)’s, \(I \subseteq \{ 0, \dots , k\}\). Moreover
-
(3)
if \(1 \le k \le 2n+1\), for \(1\le j\le n, k\) and \(i_0, \dots , i_j \in \{ 0, \dots , k\}\), \(i_0< \dots < i_j\), \(\sigma _{p_{i_0}, \dots , p_{i_j}}^h\)’s are horizontal piecewise linear maps,
-
(4)
if \( n+1 \le k \le 2n+1\), for \(n+1 \le j \le k\) and \(i_0, \dots , i_j \in \{ 0,\dots , k \} \), \(i_0< \dots < i_j\), \(\sigma _{p_{i_0}, \dots , p_{i_j}}^h\)’s are linear combination of singular simplexes with straight j-layers.
As in Proposition 4.14, we can say that \(\sigma ^h\) is \(\delta _r\)-equivariant and \(\tau _q\)-equivariant in the sense that, chosen some points \(p_0, \dots , p_k\), \(\delta _r \circ \sigma _{p_0, \dots , p_k}^h \) and \(\tau _q \circ \sigma _{p_0, \dots , p_k}^h \) still satisfy the four points.
Proof
Points (1) and (2) of the proposition derive immediately by the methods used to prove the following points. If \(k=0\), the claim is trivial. If \(k\ge 1\), by applying 3.4.B in [10] or Lemma 4.13 in [14], and by dilating and left translating, we can say that, there exist a continuous map
such that each face and subface \( \sigma _{p_{i_0}, \dots , p_{i_j}}^h: \Delta ^j \rightarrow \mathbb {H}^n\), with \(j\le n, k\) and \(i_0,\dots i_j \in \{ 0, \dots , k\}\), is a piecewise linear horizontal map with vertices \(p_{i_0}, \dots , p_{i_j}\), which satisfies point (3) for \( 1 \le k \le 2n+1\). In particular this completes the proof for \(k \le n\). For \( n+1 \le k \le 2n+1\), this proves point (3) and we are left to verify point (4). In order to do so, we start with the case \(k=n+1\), meaning also \(j=n+1\). Among the simplexes we just created, we consider the \({k+1 \atopwithdelims ()j}={n+2 \atopwithdelims ()n+1} = n+2\) horizontal maps \(\sigma _{p_0, \dots , {\hat{p}}_i, \dots , p_{n+1}}^h \in PL(\Delta ^n, \mathbb {H}^n)\), with \(i \in \{0,\dots ,n+1\}\) where we exclude one point with the hat notation \(\ \hat{} \ \). Notice that we can consider the map \(\partial \Delta ^{n+1} \rightarrow \mathbb {H}^n \) defined by these \(n+2\) maps along the border of \(\Delta ^{n+1}\):
and this works perfectly as the border of a \((n+1)\)-simplex according to Notation 4.8. In order to construct such \((n+1)\)-simplex, we take the exponential center of gravity
and we extend all \(n+2\) singular n-simplexes \(\sigma _{p_0, \dots , {\hat{p}}_i, \dots , p_{n+1}}^h\)’s by one dimension to \(n+2\) singular \((n+1)\)-simplexes following the \(j^{th}\) step of the construction in Definition 4.6. Hence we obtain \(n+2\) singular \((n+1)\)-simplexes whose \((n+1)\)-layer is straight:
All these simplexes have the vertex q in common and they all share, two by two, n other vertices as well. Since the construction is exactly the same for all of them, this means that they also perfectly touch and coincide on their new borders.
This means that we can define a new singular \((n+1)\)-simplex \(: \Delta ^{n+1} \rightarrow \mathbb {H}^n\) where \( \Delta ^{n+1}\) is divided in \(n+2\) tetrahedra by its center of gravity in \( \bar{q} \in \Delta ^{n+1}\) and each of those tetrahedra is sent to one of the \(n+2\) singular \((n+1)\)-simplexes \( \Delta ^{n+1}_{p_0, \dots , {\hat{p}}_i, \dots , p_{n+1}, q}\)’s in a natural way, with \(\bar{q} \in \Delta ^{n+1}\) pointing at \(q \in \mathbb {H}^n\). Hence we obtain a new map
which is a \((n+1)\)-simplex with vertices \(p_0, \dots , p_{n+1}\) and which is a linear combination of singular \((n+1)\)-simplexes with straight \((n+1)\)-layer. By dilating and left translating, we define a continuous map
which completes the claim for \(k=n+1\). To verify now point (4) for \( n+1 < k \le 2n+1\) and \(n+1 \le j\le k\), one can proceed in exactly the same manner as we did in the case \(k=n+1\) and by induction on j, \(n+1 \le j\le k\). The base case is then \(j=n+1\) and then one can proceed in this manner: first consider the \({k+1 \atopwithdelims ()j } = {k+1 \atopwithdelims ()n+1 }\) horizontal maps whose linear combination becomes the border of our simplex-to-be. Then extend those n-simplexes into \((n+1)\)-simplexes adding as point the exponential center of gravity of the current points and following the \(j^{th}\) step of the construction in Definition 4.6. The linear combination of these singular \((n+1)\)-simplexes is then a new \((n+1)\)-simplex with straight \((n+1)\)-layer.
The main case with j general, supposes that we built straight layers on our simplexes up to dimension \(j-1\). In this case one proceed virtually in an identical way: first consider the \({k+1 \atopwithdelims ()j } \) singular \((j-1)\)-simplexes with straight \((j-1)\)-layer whose linear combination becomes the border or our simplex-to-be. Then extend those \((j-1)\)-simplexes into j-simplexes adding as point the exponential center of gravity of the current points and following the \(j^{th}\) step of the construction in Definition 4.6. The linear combination of these j-simplexes is then the new j-simplex that completes the claim. \(\square \)
4.3 Regular Triangulations of \(\mathbb {H}^{n}\)
In this subsection we give a notion of triangulation for polyhedrons and, subsequently, for the whole space as well. We start considering a polyhedron Q with vertices in \(\{0,1\}^k\), which is the same as saying that we index its vertices by strings in \(\{0,1\}^k\), and then we move to a more general case, defining a notion of triangulation and showing that we can use simplexes from Subsect. 4.2 to triangulate a polyhedron and then the entire space.
Lemma 4.16
Let \(k \in \mathbb {N}\) and denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\). Any injective map
defines a singular k-simplex
such that \(\sigma _s (e_j) =s(j)\) for all \( j \in \{ 0,\dots , k\} \) and where \(Q \subseteq \mathbb {H}^{n}\) is a polyhedron with vertices in \(\{0,1\}^k\). In particular this means that the vertices of \(\sigma _s ( \Delta ^k)\) coincide with vertices of Q. Moreover, we can take \(\sigma _s\) to be a straight k-simplex.
Proof
We can take \(\sigma _s\) to be the affine map that maps the \(k+1\) vertices of the simplex \( \Delta ^k\) into the image of s, which is comprised by vertices of Q, continuously. This gives us a singular simplex.
Moreover, since \(\sigma _s\) is defined starting from its vertices, we can also construct it following Definition 4.6 and obtain \(\sigma _s\) to be a straight k-simplex \(\sigma _{s(0), \dots , s(k)}\). \(\square \)
Note that in Lemma 4.16, if we take \(\sigma _s\) to be the affine map, we get that \(\sigma _s ( \Delta ^k)\) is contained in the unit k-cube \([0,1]^k\): \(\sigma _s ( \Delta ^k) \subseteq [0,1]^k\). A polyhedron Q covered by simplexes can be called a polyhedral simplex.
In the next corollary, we generalize the set \(\{0,1\}^k\) to a set of \(2^k\) elements.
Corollary 4.17
Let \(k \in \mathbb {N}\) and denote \(\Delta ^k\) the standard k-simplex in \(\mathbb {R}^{k+1}\). Consider \(K \subseteq \mathbb {H}^n\) a set containing \(2^k\) points in \( \mathbb {H}^n\). Any injective map
defines a singular k-simplex
such that \(\sigma _s (e_j) =s(j)\) for all \( j \in \{ 0,\dots , k\} \) and where \(Q_K \subseteq \mathbb {H}^{n}\) is a polyhedron with vertices in K. In particular this means that the vertices of \(\sigma _s ( \Delta ^k)\) are \(s(0), \dots , s(k)\) and coincide with vertices of \(Q_K\). Moreover, we can take \(\sigma _s\) to be a straight k-simplex.
The proof of Corollary 4.17 is virtually identical to the one for Lemma 4.16, just considering the vertices of \(Q_K\) instead of Q.
Definition 4.18
Let \(k \in \mathbb {N}\). We say that, for all \(x,y \in \{0,1\}^k\),
This is a partial order on strings and we denote I the set of increasing functions s of the kind \(s: \{ 0,\dots , k\} \rightarrow \{0,1\}^k\). Likewise, consider \(2^k\) points in \( \mathbb {H}^n\) and group them into the set K. We say that, for all \(x,y \in K\),
This is a partial order on points of \(\mathbb {H}^n\) and we denote \(I_K\) the set of increasing functions s of the kind \(s: \{ 0,\dots , k\} \rightarrow K\).
Note that, if \(K = \{0,1\}^{2n+1}\) and we associate strings in \(\{0,1\}^{2n+1}\) to the corresponding points in \( \mathbb {H}^n\), the two partial orders are the same.
Definition 4.19
(see 2.2 in [2]) Consider a singular k-simplex \(\sigma _s: \Delta ^k \rightarrow Q_K \) coming from an injective map s as above. The orientation of \(\sigma _s\) is defined as:
Definition 4.20
(see 2.2 in [2]) The set of singular k-simplexes \(\sigma _s: \Delta ^k \rightarrow Q_K \), such that \(s \in I_K\), establishes a triangulation of \(Q_K\). Furthermore, we denote a singular k-chain of the triangulation by
Similarly, by taking straight k-simplexes \(\sigma _s: \Delta ^k \rightarrow Q_K\), such that \(s \in I_K\), we get a straight triangulation of \(Q_K \) and a straight k-chain of the triangulation.
Note that singular k-simplexes \(\sigma _s\)’s comprised in a triangulation do not overlap each other except that at the border because they are built following the same construction, whether as affine maps, straight simplexes or else. This also means that the border of \(\tau \), which is a linear combination of the borders of its simplexes, lives on the border of \(Q_K\), since the internal borders of the simplexes will cancel each others out:
Furthermore note that, since the singular simplexes are continuous and by construction, this definition of triangulation is consistent with, for example, the one in Section 2.2 in [15] and Section 1.3.2 in [1].
After Definition 4.20, one can see that k! simplexes are needed to triangulate a k-dimensional cube, meaning that \(|I| = k!\). Moreover, recalling Definition 4.4 about the border of a simplex, one can say that the faces (or subfaces of any dimension) of \(Q_K\) are naturally triangulated by the boundary pieces of the higher-dimensional simplexes belonging to the triangulation of the cube.
Last, we can generalize the triangulation to the whole \(\mathbb {H}^n\) via general polyhedrons. For example, we could triangulate the grid of cubes \( Q_{\epsilon p, \epsilon }\)’s from Sect. 3 by using singular k-simplexes as affine maps, which provides \(\mathbb {H}^n\) with a triangulation into singular simplexes for the whole space, albeit with very little regularity (not straight nor horizontal). Another example would be to triangulate polyhedrons with vertices in \(\mathbb {Z}^{2n+1}\) as straight simplexes using Definition 4.6, which would give us a triangulation of straight simplexes for the whole space \(\mathbb {H}^{n}\) (but with no horizontality for low dimensions). In the following proposition we propose a yet different kind of triangulation.
Proposition 4.21
Let \(\Delta ^{k}\) denote the standard k-simplex in \(\mathbb {R}^{k+1}\). There exists a triangulation of the Heisenberg group \(\mathbb {H}^{n}\) composed of singular simplexes
such that
-
(1)
for \(0<k \le n\), \(\sigma ^k\)’s are horizontal piecewise linear maps.
-
(2)
for \( n+1 \le k \le 2n+1\), \(\sigma ^{k}\)’s are singular simplexes with straight k-layer.
Proof
Thanks to Proposition 4.15 we have families of suitable simplexes. By grouping them into triangulations of polyhedrons starting from a grid of vertices in \(\mathbb {Z}^{2n+1}\), we get a triangulation of the whole space. \(\square \)
In the Appendix below we show two basic examples, triangulating the square and the cube in \(\mathbb {H}^1\).
References
Agrachev, A., Barilari, D., Boscain, U.: A Comprehensive Introduction to Sub-Riemannian Geometry. Cambridge University Press, Cambridge (2019)
Balogh,Z. M., Kozhevnikov,A., Pansu.,P.:Hölder Maps from Euclidean Spaces to Carnot Groups. Preprint (2017)
Biagi, S., Bonfiglioli, A.: An Introduction to the Geometrical Analysis of Vector Fields: with Applications to Maximum Principles and Lie Groups. World Scientific Publishing Co. Pte. Ltd., Singapore (2019)
Canarecci, G.: Sub-Riemannian Currents and Slicing of Currents in the Heisenberg group \(\mathbb{H} ^n\). J. Geome. Anal. 31, 5166–5200 (2020)
Capogna, L., Danielli, D., Pauls, S.D., Tyson, J.T.: An Introduction to the Heisenberg Group and the Sub-Riemannian Isoperimetric Problem. Birkhäuser Verlag AG, Basel, Boston, Berlin (2007)
Corwin, L., Greenleaf, F.P.: Representations of Nilpotent Lie Groups and Their Applications. Basic theory and Examples. Cambridge University Press, Cambridge and New York (1990)
Epstein, D.B.A., Cannon, J.W., Holt, D.F., Levy, S.V.F., Paterson, M.S., Thurston, W.P.: Word Processing in Groups. Taylor & Francis Group, Boca Raton, London, New York (1992)
Franchi, B., Serapioni, R., Serra Cassano, F.: Regular submanifolds, graphs and area formula in Heisenberg groups. Adv. Math. 211(1), 152–203 (2007)
Gromov, M.: Partial Differential Relations. Springer-Verlag, Berlin and Heidelberg (1986)
Gromov, M.: Carnot–Carathéodory spaces seen from within. Prog. Math. 144, 79–323 (1996)
Lee, J.M.: Introduction to Topological Manifolds. Springer, New York, Dordrecht, Heidelberg, London (2011)
Maunder, C.R.F.: Algebraic Topology. Cambridge University Press, Cambridge (1980)
Pansu, P.: Métriques de Carnot-Carathéodory et Quasiisométries des Espaces Symétriques de Rang Un. Ann. Math. 129(1), 1–60 (1989)
Young, R.: Filling inequalities for nilpotent groups through approximation. Groups Geom. Dyn. 7, 977–1011 (2013)
Young, R.: High-dimensional fillings in Heisenberg groups. J. Geom. Anal. 26(2), 1596–1616 (2016)
Acknowledgements
I would like to thank my adviser, university lecturer Ilkka Holopainen for his reviews. I also want to thank professor Pierre Pansu for the stimulating discussions and suggestions.
Funding
Open Access funding provided by University of Helsinki including Helsinki University Central Hospital.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
This work was partially supported by a grant from the Vilho, Yrjö and Kalle Väisälä Fund.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Examples of Triangulations
Appendix: Examples of Triangulations
Example 1
Consider \(n=1\). If \(k=2\) and \(K = \{ (x,y,0) \ / \ x,y \in \{0,1 \}^2 \} \approx \{0,1 \}^2\), we have exactly two increasing functions of the kind \(s: \{ 0,1,2\} \rightarrow \{0,1\}^2 \approx K \subseteq Q\), i.e., \(I=\{ s_1, s_2 \}\):
This is not a surprise, since one needs two triangles to triangulate a square. From \(s_1\) and \(s_2\), we get two singular 2-simplexes of the kind \(\sigma : \Delta ^2 \rightarrow Q\):
The singular 2-chain of the triangulation is then
since
and
So the orientation of the two linear simplexes is one the opposite of the other. Finally the border of this triangulation is
because \( \sigma _{s_1} \circ F^1 = \sigma _{s_2} \circ F^1 \). We see that \(\partial \tau \) triangulates the border of the square with one simplex on each face.
Example 2
Consider \(n=1\) with \(k=3\), we have a total of six maps in I of the kind \(s: \{ 0,1,2,3\} \rightarrow \{0,1\}^3 \subseteq Q\), i.e., \(I=\{ s_1,\ s_2,\ s_3,\ s_4,\ s_5,\ s_6 \}\):
This matches our intuition that one needs six tetrahedra to triangulate the cube. From these functions, we get six singular 3-simplexes of the kind \(\sigma : \Delta ^3 \rightarrow Q\):
The singular 3-chain of the triangulation is then
since
and so on. The border of this triangulation is
because
We see that \(\partial \tau \) triangulates the border of the cube with two simplexes on each face.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Canarecci, G. Horizontal and Straight Triangulation on Heisenberg Groups. J Geom Anal 33, 254 (2023). https://doi.org/10.1007/s12220-023-01316-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12220-023-01316-8