
Abstract
Using equivariant differential geometry, we provide a family of free boundary minimal surfaces in the unit ball \({\mathbb {B}}^n\subset {\mathbb {R}}^n\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Minimal surfaces are a classical field of study in geometry. They have been studied since 1760 [14] and remain an active field of study. Their study began with the problem of finding a surface in \({\mathbb {R}}^3\) with minimal area given a fixed boundary. Solutions to this problem have zero mean curvature. In what follows we consider any surface which has this property to be a minimal surface. Minimal surface theory is still a very active field of research in which a broad variety of mathematical tools are used, e.g. tools from the theory of partial differential equations (PDE) and calculus of variations. That said, examples have played a critical role in shaping research in the field, both by informing the creation of new conjectures and discrediting old.
A particularly nice source of examples arises from methods from ‘Equivariant Differential Geometry’. This is the study of differential geometric constructions which admit some additional symmetries. Usually the assumption of additional symmetries greatly simplifies the equations describing certain differential geometric objects and allows specific examples to be constructed. This is exactly the case for the class of so-called F-invariant minimal surfaces which will be studied in this manuscript. In 1971, Hsiang and Lawson [13] proved a reduction theorem reducing the problem of finding minimal surfaces in a manifold M invariant under the action of a Lie group G to the much simpler problem of finding minimal surfaces in M/G. In 1993, studying the standard action of \(\mathrm {SO}(m)\times \mathrm {SO}(m)\) on \({\mathbb {R}}^m\times {\mathbb {R}}^m\), Alencar [2] described minimal hypersurfaces in \({\mathbb {R}}^{2m}\) invariant under this action. In [21], a reduction theorem, similar to that of [13], was proven for what we call F-invariant hypersurfaces. In continuing this work Wang classified all such minimal hypersurfaces in 1994 [20]. Unfortunately, it seems this paper has not been widely read since, in the following years, many papers have attempted to classify certain simple subsets of G-invariant minimal surfaces, for example [3, 12]. Most of the results in these papers are direct consequences of results proved in [20]. Due to this we feel it would be helpful to write a more accessible account of (some of) Wang’s results.
The notion of an F-invariant hypersurface in \({\mathbb {R}}^n\) is as follows: An isoparametric hypersurface M in the sphere \({\mathbb {S}}^{n-1}\) is a hypersurface with constant principal curvatures. Say this has g distinct principal curvatures with multiplicities \(m_1\) and \(m_2\). All the parallel translates of M are also isoparametric hypersurface except for two, the so-called focal submanifolds \(V_1\) and \(V_2\), which are of codimension \(m_1+1\) and \(m_2+1\) in \({\mathbb {S}}^{n-1}\). There always exists a function F on \({\mathbb {S}}^{n-1}\) such that the level sets of F are exactly the isoparametric hypersurfaces. This partition of \({\mathbb {S}}^{n-1}\) can be extended to \({\mathbb {R}}^n\) by homotheties. We call a hypersurface composed of a union of leaves of this partition F-invariant. In any such family, in \({\mathbb {S}}^{n-1}\), there exists one isoparametric hypersurface which is minimal, say \(M^*\). The cone over this, the minimal cone \(C(M^*)\), is the simplest example of an F-invariant minimal hypersurface. Since isoparametric hypersurfaces generalise hypersurfaces in the sphere invariant under the action of a Lie group, F-invariant hypersurfaces generalise hypersurfaces invariant under a subgroup of O(n). See Sect. 2.2 for a full list of possible triples \((g,m_1,m_2)\).
A subset of minimal surfaces which has attracted particular attention in recent years are those contained in the unit ball which intersect its boundary perpendicularly, called free boundary minimal surfaces. Freidin, Gulian and McGrath [12] already found many examples of free boundary minimal surfaces in the unit ball with some extra symmetry, but they did it in the context of [3]. This only covered \(O(n)\times O(m)\) symmetries. Using the set up in [20] we extend this to the much bigger class of all F-invariant minimal surfaces in the unit ball. In particular, we construct two families of F-invariant free boundary minimal surfaces in the unit ball. The family \(\Sigma _{g,m_1,m_2}^k\) was already constructed in [20], but \(\Omega _{g,m_1,m_2}\) is new.
Theorem 1.1
Given an isoparametric hypersurface in \({\mathbb {S}}^{n-1}\) with corresponding triple \((g,m_1,m_2)\) where \(n=\frac{m_1+m_2}{2}g+2\), we can construct F-invariant free boundary minimal surfaces in the unit ball \({\mathbb {B}}^n\) in \({\mathbb {R}}^n\) in the following ways:
-
(1)
If \(n<4g\), i.e.
$$\begin{aligned} (g,m_1,m_2)&\in \{(1,1,1), (2,m_1,m_2)\,\text{ for }\,\,m_1+m_2<6, (3,1,1), (3,2,2)\\&\quad (4,1,1), (4,1,2), (4,1,3), (4,1,4), (4,1,5),\\&\quad (4,2,2), (4,2,3), (6,1,1), (6,2,2)\}, \end{aligned}$$for all natural numbers k we can construct a free boundary minimal surface \(\Sigma _{g,m_1,m_2}^k\) in \({\mathbb {B}}^n\).
-
(2)
If \((g,m_1,m_2) \ne (2,1,5),(2,5,1), (4,1,6), (4,6,1)\) and \(n\ge 4g\), i.e.
$$\begin{aligned} (g,m_1,m_2)&\in \{(1,m,m)\,\text{ for }\,\,m\ge 2, (2,m_1,m_2)\,\text{ for }\,\,m_1+m_2\ge 6, (3,4,4), (3,8,8),\\&\quad (4,m_1,m_2)\,\text{ for }\,\, m_1+m_2\ge 7\, \text{ and }\,\,m_1+m_2+1\,\text{ a } \text{ multiple } \text{ of }\,\, 2^{\phi (m_1-1)},\\&\quad \text{ where }\,\, \phi (l)\, \text{ is } \text{ the } \text{ number } \text{ of } \text{ integers }\,\, s \,\text{ with }\,\,1 \le s \le l\,\\&\quad \text{ and }\,\, s \equiv 0, 1, 2, 4 \mod 8 \}, \end{aligned}$$we can construct a free boundary minimal surface \(\Omega _{g,m_1,m_2}\) in \({\mathbb {B}}^n\).
Organisation Preliminaries are provided in Sect. 2: we give a brief review on Wang’s classification of F-invariant minimal surfaces in \({\mathbb {R}}^n\) since this will be relevant later when studying free boundary minimal surfaces in balls. Afterwards we give some preliminaries on isoparametric hypersurfaces before we finally provide the reduction theorem. In Sect. 3, we derive the vector field which describes the dynamical system we will be studying. Further, in this section we begin the analysis of this dynamical system. In Sect. 4, we use the classification of orbits to derive a classification of so called profile curves. Finally, in Sect. 5, we use our set up to construct a new family of free boundary minimal surfaces in the unit ball, i.e. we prove Theorem 1.1.
2 Preliminaries
In Sect. 2.1 we give a brief review on Wang’s construction of F-invariant minimal surfaces in \({\mathbb {R}}^n\). Section 2.2 provides preliminaries on isoparametric hypersurfaces. Section 2.3 contains the proof of the reduction theorem.
2.1 Wang’s Construction of F-invariant Minimal Surfaces in \({\mathbb {R}}^n\)
Wang’s approach to classifying all F-invariant minimal surfaces in \({\mathbb {R}}^n\) works as follows: One can use well-known techniques from equivariant differential geometry to show that it suffices to consider F-invariant variations to show that an F-invariant hypersurface is minimal. Given a fixed F we can parametrise all the isoparametric hypersurfaces in \({\mathbb {S}}^{n-1}\) and their translates by two coordinates, \((r,\varphi )\) in the domain
The problem of showing an F-invariant surface is minimal is then equivalent to showing that the so-called profile curve, which is a curve in \(D_g\) associated to the F-invariant surface in a concrete way, is a geodesic. Using the invariance of geodesics in \(D_g\) to homotheties, we reduce the problem of finding geodesics further to simply the analysis of a dynamical system in the plane. We can then use the well-developed theory of dynamical systems to completely classify the behaviour of the orbits of this system, each of which corresponds to a family of profile curves and further minimal surfaces. This allows us to answer questions about the embeddedness, asymptotic behaviour, topological type and stability of all F-invariant minimal surfaces. These are summarised in the following two theorems. A full list of triples satisfying these conditions is given in Sect. 2.2.
Recall from the introduction that for an isoparametric hypersurface in the sphere \({\mathbb {S}}^{n-1}\), all the parallel translates of this isoparametric hypersurface are also isoparametric hypersurface except for two, the so-called focal submanifolds \(V_1\) and \(V_2\), which are of codimension \(m_1+1\) and \(m_2+1\) in \({\mathbb {S}}^{n-1}\). Below \(V_1\) and \(V_2\) will always denote these focal submanifolds.
Theorem 2.1
(Wang [20]) Any complete F-invariant minimal surface M in \({\mathbb {R}}^n\), with triple \((g,m_1,m_2)\), such that \(n<4g\), is of one of the following types:
-
Cone: M is the cone \(C(M^*)\) where \(M^*\) is the unique minimal isoparametric hypersurface in \({\mathbb {S}}^{n-1}\). Further, M is unstable if \(g>1\) and area minimizing if \(g=1\).
-
Type I: M is embedded and asymptotic to the cone \(C(M^*)\), intersecting it infinitely often. Further, M is diffeomorphic to \({\mathbb {S}}^{n-1}-V_1\) or \({\mathbb {S}}^{n-1}-V_2\) and unstable.
-
Type II: M is immersed, intersecting itself infinitely often and asymptotic to the cone \(C(M^*)\). Further, M is diffeomorphic to \({\mathbb {S}}^{n-1}-\{V_1\cup V_2\}\) and unstable.
Theorem 2.2
(Wang [20]) Any complete F-invariant minimal surface M in \({\mathbb {R}}^n\), with triple \((g,m_1,m_2)\), such that \(n\ge 4g\), is of one of the following types:
-
Cone: M is the cone \(C(M^*)\). Further, \(C(M^*)\) is stable. If \((g,m_1,m_2)\ne (2,1,5)\) or (4, 1, 6), \(C(M^*)\) is also area minimizing but otherwise not.
-
Type I: M is embedded and asymptotic to the cone \(C(M^*)\). Further, M is diffeomorphic to \({\mathbb {S}}^{n-1}-V_1\) or \({\mathbb {S}}^{n-1}-V_2\). If \((g,m_1,m_2)\ne (2,1,5)\) or (4, 1, 6), M is stable, otherwise not.
-
Type II: M is embedded and asymptotic to the cone \(C(M^*)\), intersecting it at most once. Further, M is diffeomorphic to \({\mathbb {S}}^{n-1}-\{V_1\cup V_2\}\) and is unstable.
2.2 Brief Review of Isoparametric Hypersurfaces
In this subsection, we discuss isoparametric hypersurfaces and some of their properties. More details can be found in [5, 7, 19].
Given a Riemannian manifold M, we call a smooth function \(f: M\rightarrow {\mathbb {R}}\) an isoparametric function if there exist smooth functions \(T, S:{\mathbb {R}}\rightarrow {\mathbb {R}}\) such that:
Given such a function f we can decompose M into a union of fibres of f. We call a fibres with maximal rank regular. The subset of M which consists of such fibres is denoted by \(M^0\). The complement of \(M^0\) in M consists of the singular fibres. The regular fibres are called isoparametric hypersurfaces and the singular fibers are called focal submanifolds. There is a particularly interesting theory of such functions in the case \(M={\mathbb {S}}^{n-1}\) and from now on we restrict ourselves to this case. Geometrically, (2.1) implies that isoparametric hypersurfaces in spheres have constant principal curvatures. In fact, any such hypersurface also gives rise to an isoparametric function. For an isoparametric hypersurface M, we denote the number of distinct principal curvatures by g. In [15], Münzner proved that if we order the principal curvatures by value and let \(m_i\) be the multiplicity of the ith principal curvature, then
Further, in [16], he showed that the only possible values for g are \(g\in \{1,2,3,4,6\}\). Directly from counting dimensions, we see that these numbers satisfy the identity
in \({\mathbb {S}}^{n-1}\). We can actually describe the geometry of a family of isoparametric hypersurfaces quite well. Let \(f:{\mathbb {S}}^{n-1}\rightarrow {\mathbb {R}}\) be an isoparametric function and assume the fibres of f are connected and \(f({\mathbb {S}}^{n-1})=[c_1,c_2]\). The focal submanifolds \(V_i:=f^{-1}(c_i)\), \(i\in \{1,2\}\), are smooth minimal submanifolds of \({\mathbb {S}}^{n-1}\) of codimension \(m_i+1\) and dist\((V_1,V_2)=\frac{\pi }{g}\). For any \(c\in (c_1,c_2)\), \(f^{-1}(c)\) is a smooth compact hypersurface which is the tube \(M_{\varphi _i}\) of constant radius \(\varphi _i\) around \(V_i\), \(\varphi _i\in (0,\frac{\pi }{g})\). The principal curvatures of \(M_\varphi \) are \(\cot (\varphi )\), \(\cot (\varphi +\frac{\pi }{g})\), \(\cot (\varphi +\frac{2\pi }{g})\dots \) with multiplicities \(m_1,m_2,m_1 \dots \) . Below we denote by \(v(\varphi )\) the volume of \(M_\varphi \). It is given by
for some constant C and the mean curvature of \(M_\varphi \) is given by
Finally, there is a harmonic homogeneous polynomial F of degree g on \({\mathbb {R}}^n\) called the Cartan Münzner polynomial, such that \(F_{|{\mathbb {S}}^{n-1}}=\cos (g\varphi )\) and F satisfies
where \(r=\left\Vert x\right\Vert \). This gives us a canonical choice for which isoparametric function to associate to an isoparametric hypersurface.
Examples for isoparametric hypersurfaces in spheres include the following:
-
For \(g = 1\), the focal submanifolds are poles and the \(M_\varphi \) are spheres parallel to the equator.
-
For \(g = 2\), the focal submanifolds are \({\mathbb {S}}^{m_1}\), \({\mathbb {S}}^{m_2}\) and the isoparametric hypersurfaces are then Clifford tori \({\mathbb {S}}^{m_1}(r)\times {\mathbb {S}}^{m_2}(s)\) where \(r^2+s^2=1\).
-
More generally, if G is some Lie subgroup of \(\mathrm {SO}(n)\) then the orbits of G form a family of isoparametric hypersurfaces (under some restrictions). We call such a family homogeneous. If \(m_1=1\) or \(m_2=1\) then this is the case. Many, but not all, isoparametric hypersurfaces are of this form. Homogeneous isoparametric hypersurfaces can be completely classified based on [13].
-
For \(g=3\), Cartan [6] proved that we have \(m_1=m_2\in \{1,2,4,8\} \). Further, he also showed that the focal submanifolds are given by embeddings of \({{\mathbb {R}}}{{\mathbb {P}}}^2\), \({\mathbb {C}}{\mathbb {P}}^2\) or \({\mathbb {H}}{\mathbb {P}}^2\) and the \(M_\varphi \) are tubes around these.
-
For \(g=4\), there are two families of homogeneous isoparametric hypersurfaces. In [11], Ferus, Karcher and Münzner constructed examples of inhomogeneous isoparametric hypersurfaces based on representations of Clifford algebras with \(g=4\). These are called FKM-type isoparametric hypersurfaces. The classification of isoparametric hypersurfaces with \(g=4\) was completed by Chi in [8].
-
For \(g=6\), Abresch [1] proved that \(m_1=m_2\in \{1,2\}\). In [9], Dorfmeister and Neher showed all examples with \(m_1=1\) are homogeneous, but the classification is not complete for \(m_1=2\) [17].
The following table contains the possible triples \((g,m_1,m_2)\). We list them with the conditions \(n<4g\) and \(n\ge 4g\) as these will be critical in what follows.
\(n<4g\) | \(n\ge 4g\) | |
|---|---|---|
\(g=1:\) | (1, 1, 1) | (1, m, m) for \(m\ge 2\) |
\(g=2:\) | \((2,m_1,m_2)\) for \(m_1+m_2 <6 \) | \((2,m_1,m_2)\) for \(m_1+m_2\ge 6\) |
\(g=3:\) | (3, 1, 1), (3, 2, 2) | (3, 4, 4), (3, 8, 8) |
\(g=4:\) | (4, 1, 1), (4, 1, 2), (4, 1, 3), (4, 1, 4), (4, 1, 5), (4, 2, 2), (4, 2, 3) | (4, 4, 5) or \((4,m_1,m_2)\) for \(m_1+m_2\ge 7\) and \(m_1+m_2+1\) a multiple of \(2^{\phi (m_1-1)}\), where \(\phi (l)\) is the number of integers s with \(1 \le s \le l\) and \(s \equiv 0, 1, 2, 4 \mod 8\), see Stolz [18]. |
\(g=6:\) | (6, 1, 1), (6, 2, 2) |
2.3 Reduction Theorem
To prove the reduction theorem we will use a standard reduction technique from equivariant differential geometry. In this section, we introduce this technique and the notions from vector calculus needed to understand it. We finally provide the reduction theorem. This section is based on [10].
We begin by fixing some notation. We let \((M^m,g)\) and \((N^n,h)\) be Riemannian manifolds of dimensions m and n respectively and let \(\varphi :M\rightarrow N\) be a smooth map. A minimal surface is a critical point of the volume functional. Precisely, we say
is minimal if \(\varphi \) is a Riemannian immersion and \(\varphi \) is a critical point of the volume functional
with respect to variations \(\varphi _t\) through compactly supported Riemannian immersions. Note that we endow M with the induced metric \(\varphi ^*h\) and thus \(|\Lambda ^m \mathrm{d}\varphi |\mathrm{d}x\) is the associated volume form. The tension field of \(\varphi \) is defined to be the trace of the second fundamental form
Let \(\varphi _t\) be a variation through compactly supported Riemannian immersions. Then, we have
where \(\nu \) is the volume element induced by \(\varphi _0^*h=\varphi ^*h\). It follows that M is minimal if and only if
To state the reduction theorem, we have to define a few more notions. Recall, we say a smooth map \(\pi :M\rightarrow N\) is a submersion if the differential \(d\pi \) is surjective. This induces a splitting
where \(T^VM=\ker \pi \) is called the vertical part and \(T^HM\), its orthogonal complement, is called the horizontal part. We say \(\pi \) is a Riemannian submersion if the restriction
is an isometry.
Further, we call a map \(F:M\rightarrow N\) transnormal if there exists a function, \(T: N\rightarrow {\mathbb {R}}\), such that
The fibres of such a map have constant rank and we call the set on which they have maximal rank the regular set \(M^0\subset M\). Further, there exists a unique quotient metric \(h_F\) on \(N^0=F(M^0)\), such that \(F:(M^0,g)\rightarrow (N^0,h_F)\) is a Riemannian submersion. In fact, if two transnormal maps have the same fibres, then the quotient metrics are the same. We call a map \(F:M\rightarrow N\) isoparametric if it is transnormal and additionally there exists a vector field \(S\in \Gamma (TN)\), such that
Here \(\Gamma (TN)\) are the sections of the tangent bundle \(TN\rightarrow N\) of N. Note that the definition of isoparametric maps is in accordance with that of Sect. 2.2, i.e. for \(N={\mathbb {R}}\) we recover the definition of isoparametric functions of Sect. 2.2.
Finally, we introduce the notion \((\rho ,\sigma )\)-equivariance. Let \(\rho :M\rightarrow P\), \(\sigma :N\rightarrow Q\) be Riemannian submersions. We say a map \(\varphi :M\rightarrow N\) is \((\rho , \sigma )\)-equivariant if there exists \({\bar{\varphi }}\) such that the following diagram commutes:

Theorem 2.3
(Theorem 4.5 [10]) Let \(\varphi \) be a \((\rho ,\sigma )\)-equivariant map. Assume that
-
(a)
\(\sigma ,\rho \) are isoparametric,
-
(b)
\(\mathrm{d}\varphi (T^HM)\subset T^HN\),
-
(c)
\(\varphi :\rho ^{-1}(z)\rightarrow \sigma ^{-1}({\bar{\varphi }}(z))\) is a Riemannian submersion for all \(z \in P\), with respect to the induced metrics,
then \(\tau (\varphi )=0\) iff it is stationary with respect to \((\rho ,\sigma )\)-equivariant variations.
With this preparation at hand we can finally provide the reduction theorem. Note that a similar reduction theorem has already been stated in [21]. Since we could not follow the proof in [21], we provide one here.
Theorem 2.4
(The reduction theorem) Let \(f: M \rightarrow N\) be an isoparametric map with connected compact fibres and image N. Let \(N^0\) be the regular set of N and \(N_1 \subset N^0\) a submanifold. Then \(M_1:=f^{-1}(N_1)\) is minimal in M if and only if \(N_1\) is minimal in \(N^0\), with respect to the following metric
where v is the volume function of the fibres of f and \(ds_f^2\) is the quotient metric.
Proof
We can view \(M_1\) be the pullback of F over \(N_1\)
Then, we have the commutative diagram

where \(\varphi \) is the inclusion map. We can apply Theorem 2.3 since:
-
(a)
We immediately have that f and \(f|_M\) are isoparametric.
-
(b)
\(d\varphi (T^HM)\subset T^HN\) is immediate since \(\varphi \) is an inclusion and the \(f|_{M_1}\) is a restriction of f.
-
(c)
Follows immediately since \(\varphi \) is an inclusion.
We conclude that \(M_1\) is minimal if and only if it is stationary with respect to f-invariant variations, i.e. variations through fibres of f. If we let \(v(x):{\mathbb {R}}^n\rightarrow {\mathbb {R}}\) denote the volume of a fibre then the volume of \(M_1\) equals the volume of \(N_1\) with respect to the metric \(ds^2=v^2ds_f^2\) on \(N^0\). Thus \(\varphi :M_1\hookrightarrow M\) is minimal exactly when \(N_1\) is. \(\square \)
3 Derivation and Analysis of the Vector Field
In Sect. 3.1, we reduce the problem of finding F-invariant hypersurface in \({\mathbb {R}}^n\) to the study of a system of ordinary differential equations. In Sect. 3.2 we deduce the behaviour of the vector field which describes the dynamical system we will be studying. We will begin in an essentially standard way. We determine the singular points of the vector field. We then discuss the local behaviour at these points. Next, we analyse the global behaviour. A clever argument allows us to show the system has no periodic orbits. This allows us to determine the long term behaviour of all orbits. An especially important question is the behaviour of the separatrices of the vector field. All results stated in this section can be found in [20]. We added those proofs which we felt might be helpful for the reader.
3.1 Derivation of Equations
We now use the reduction theorem to reduce the problem of finding F-invariant hypersurface in \({\mathbb {R}}^n\) to the study of a system of ordinary differential equations.
Recall, given a family of isoparametric hypersurfaces \({\mathcal {F}}\) in \({\mathbb {S}}^{n-1}\), an F-invariant hypersurface in \({\mathbb {R}}^n\) is a surface, which is a union of leaves all isometric to a dilation of a hypersurface in \({\mathcal {F}}\). Recall that to any such \({\mathcal {F}}\) there is a Cartan–Münzner Polynomial F, such that \({\mathcal {F}}\) are the level sets of F in \({\mathbb {S}}^{n-1}\). We would like to use this to construct a isoparametric map whose leaves are dilations of isoparametric hypersurfaces. We define the map \({\tilde{F}}:{\mathbb {R}}^n\rightarrow {\mathbb {R}}^2\) by
That \({\widetilde{F}}\) is isoparametric, follows from the properties of Cartan–Münzner polynomials, i.e. from (2.2). We then apply Theorem 2.4, i.e. the reduction theorem, and conclude that an F-invariant hypersurface \(M_1\) is minimal if and only if \(\Gamma ={\tilde{F}}(M_1)\) is a geodesic in the space \((D_g,h)\), where
Straightforward considerations, which can be found in [20], show that this problem is equivalent to providing solutions of the system
This defines a vector field X on the strip \([0,\frac{\pi }{2}]\times (-\infty ,\infty )\).
3.2 Analysis of the Vector Field X
Let \(\eta _\theta \) (resp. \(\eta _\alpha \)) denote the set along which \(\frac{d\theta }{dt}=0\) (resp. \(\frac{d\alpha }{dt}=0\)). We then have
These sets intersect at the points \((0,\frac{\pi }{2}+k\pi )\), \((\theta ^*,k\pi )\) and \((\frac{\pi }{2},\frac{\pi }{2} + k\pi )\) , \(k\in {\mathbb {Z}}\), where
The vector field is invariant under the transformation \((\theta ,\alpha )\rightarrow (\theta ,\alpha +2\pi )\), so it suffices to describe the local behaviour around representatives for each class of fixed points in \([0,\frac{\pi }{2}]\times [-3\frac{\pi }{2},\frac{\pi }{2}]\). This gives us the following points:
compare Fig. 1.
Lemma 3.1
(Local picture at \(S_i\)) The \(S_i\) are saddle points. Further
-
(1)
At \(S_1\), the stable manifold is the vertical segment \(0\times (-\frac{\pi }{2},\frac{3\pi }{2})\).
-
(2)
For small \(\theta \in (-\epsilon ,\epsilon )\), the unstable manifold \(\gamma _1\) is given by \(\alpha (\theta )\), such that:
$$\begin{aligned} \alpha (0)=\frac{\pi }{2},\quad \alpha '(0)=-\frac{m}{m_1+1}. \end{aligned}$$
\(S_3\) has analogous stable and unstable manifolds. \(S_2\) and \(S_4\) are also analogous with unstable and stable manifolds switched.

Zero sets of the vector field
Lemma 3.2
(Local picture at \(O_{\pm }\)) \(O_+\) is a source and \(O_-\) is a sink. The points \(O_{\pm }\) are focal if \(n<4g\) and nodal if \(n \ge 4g\). Further:
-
(1)
If \(n<4g\), any curve \(\gamma \) entering (leaving) \(O_-\) (\(O_+\)) intersects the horizontal axis through \(O_-\) (\(O_+\)) infinitely many times.
-
(2)
If \(n\ge 4g\), all except two curves \(\gamma \) enter \(O_-\) with a slope \(\lambda _-\). The two exceptional curves enter \(O_-\) with a slope \(\mu _-\). Here \(\lambda _-=\frac{1}{2}(-m+\sqrt{\Delta })\) and \(\mu _-=\frac{1}{2}(-m-\sqrt{\Delta })\), where \(m = m_1+m_2 + g/2\) and \(\Delta = m^2-8(m_1+m_2)\).
Additionally, solution curves of the system have the following properties. These will help determine their long term behaviour.
Lemma 3.3
Let \(\gamma (t)=(\theta (t),\alpha (t))\) be a non-singular orbit with \(0<\theta < \frac{\pi }{2}\).
-
(1)
Whenever \(\gamma (t_0) \in \eta _{\theta }\) then \(\theta (t_0)\) is a local minimum (resp. maximum) as a function of \(\alpha \) if \(\theta (t_0)<\theta ^*\) (resp. \(\theta (t_0)>\theta ^*\)).
-
(2)
Whenever \(\gamma (t_0) \in \eta _{\alpha }\) then \(\alpha (t_0)\) is a local maximum (resp. minimum) as a function of \(\theta \) if \(\theta (t_0)<\theta ^*\) (resp. \(\theta (t_0)>\theta ^*\)).
As a consequence, minima and maxima of \(\theta \) (resp. \(\alpha \)) occur alternately along \(\gamma \).
Now, we will prove that the vector field X has no periodic orbits. This is important since it limits the possible behaviour of the system and will allow us to characterise the global behaviour of the system. We will use the monotonicity formula for minimal surfaces [4] to arrive at a contradiction.
Theorem 3.4
(No periodic orbits) The vector field X has no periodic orbits.
Proof
Suppose \(\gamma =(\theta (t),\alpha (t))\) is a periodic orbit of X. Fixing some initial r value we associate to it a geodesic \(\Gamma =(r(s),\varphi (s),\alpha (s))\) in \(D_g\). Here, r(s) solves
For any constant h, the homothety
preserves geodesics setwise in \(D_g\). Since \(\gamma \) is periodic,
for some T. By the unqiueness of solutions and the homothety property, if \(\delta =\frac{r(T)}{r(0)}>1\), we must have \(\Gamma = \delta _*\Gamma \) as these are both solution curves containing the same point. Let \(M_\Gamma \) be a minimal surface in \({\mathbb {R}}^n\) such that \({\tilde{F}}(M) = \Gamma \), then \(M_\Gamma \) is \(\delta \)-self-similar. We will apply the monotonicity formula to this surface. To show \(\delta >1\), first define
Then,
Now, we show some constraints on \(\gamma \) which prove \(\beta >0\). We know the index of \(\gamma \) must be 1. It can not go around any saddle points as the vertical lines \(\theta =0\) and \(\theta = \frac{\pi }{2}\) are invariant sets. The only remaining fixed points are sinks and saddles on the line \(\theta = \theta ^*\). We know \(\gamma \) can only encircle one of them so we assume without loss of generality that \(\gamma \) encircles \(O_-\). Let \(\alpha _+\) and \(\alpha _-\) be the maximum and minimum of \(\alpha (t)\). By Lemma 3.3, at \(\alpha _+\) we must have \(k\pi<\alpha <k\pi +\frac{\pi }{2}\). If \(\alpha _+>\pi \), it would encircle another fixed point, thus \(\alpha _+ <\frac{\pi }{2}\). Similarly, \(\alpha _->-\frac{\pi }{2}\). Thus, \(\frac{\pi }{2}<\alpha <\frac{\pi }{2}\), so \(\cos \alpha (t)>0\), consequently \(\beta > 0\) and thus that \(\delta >1\).
Recall that the monotonicity formula for minimal surfaces [4] states that for a minimal surface M,
is increasing. Note that the monotonicity formula used here is for submanifolds of \({\mathbb {R}}^n\). For a \(\delta \)-self-similar minimal surface, we know
so this fraction must be constant. Thus, we have
for some constant c. More explicitly, parametrise \(\Gamma (s)= (r(s),\varphi (s))\) by Euclidean arc length as in (2.6). Let \(s_0(\rho )\) be the solution to \(r(s)=\rho \), i.e \(s_0=r^{-1}(\rho )\). Now, we can rewrite our equation as
Taking the \(\rho \) derivative on both sides gives us
Cancelling the \(\rho \)s and applying the inverse function theorem, we have
By (2.6) and rearranging, we get
Since \(\gamma \) encircles \(O_-\), it must intersect the \(\theta \)-axis at some point, say \(\theta (t_0) < \theta ^*\). We then have
but,
since \(\theta _0<\theta ^*\) and \(\theta _0\) is a minimum. This gives a contradiction. \(\square \)
This result allows us to describe the the global behaviour of orbits. We denote by \(\gamma _i\) the non-vertical unstable/stable manifold of \(S_i\). These will be separatrices.
Lemma 3.5
(Behaviour of the separatrices) The curves \(\gamma _i\) are seperatrices, in particular:

The curvilinear rectangle \(A_1B_1A_2B_2\)
Proof
We prove this for \(\gamma _1=(\theta _\gamma (t),\alpha _\gamma (t))\), the other proofs are analogous. We denote by \(\xi \) the portion of \(\eta _{\alpha }\) connecting \(S_1\) and \(O_-\) . This can be written as a function of \(\theta \) for \(0<\theta <\frac{\pi }{2}\) as
In the limit, we have
From Lemma 3.1 we have that
Thus \(\gamma _1\) lies above \(\xi \) initially. Further, \(\alpha _\gamma \) is decreasing and \(\theta _\gamma \) is decreasing. Recall that \(\alpha \) has a local maximum for any curve crossing \(\xi \). Thus \(\gamma \) can not cross it before crossing the \(\theta \) axis. We now have two cases:
-
(1)
If \(\gamma _1\) never crosses the \(\theta \) axis then \(\alpha \) decreases montonically and \(\theta \) increases monotonically, thus \(L^+(\gamma _1)=O_-\) is the limit point.
-
(2)
If \(\gamma _1\) crosses the \(\theta \) axis, call this point \(A_1\), draw a verticle line down to \(\gamma _3\) and call this \(B_1\). Repeat the same argument for \(\gamma _3\) and call the intersection \(A_2\) and \(B_2\). This gives a curvilinear rectangle, see Fig. 2. \(\gamma _1\) can not exit this rectangle and the only limit point inside this rectangle is \(O_-\). Since our system has no periodic orbits we must have \(L^+(\gamma _1)=O_-\) by the Poincare-Bendixon theorem.
\(\square \)
We can now define a fundamental domain G, bounded by the curves \(\gamma _1\),\(\gamma _2\),\(\gamma _3\),\(\gamma _4\) and the \(\theta = 0\) and \(\theta \)=\(\frac{\pi }{2}\) axis, see Fig. 2. We call this a fundamental domain since any orbit in the strip \(0<\theta <\frac{\pi }{2}\) is a translate of an orbit in this domain by a translation \(\alpha \rightarrow \alpha +k\pi \), for some \(k\in {\mathbb {Z}}\), up to a change of direction. This justifies limiting our analysis to just this region.
Lemma 3.6
(Behaviour of other curves) For any curve \(\gamma \) not in boundary of G, we have
We call a triple \((g,m_1,m_2)\) with \(n\ge 4g\) unstable if the curves \(\gamma _1\) or \(\gamma _2\) cross the line \(\theta =\theta ^*\). Otherwise we call the triple stable. We classify unstable and stable triples in the next section but for now we classify all the orbit of vector fields given by stable triples.
Theorem 3.7
(Orbit Types A) If \(n<4g\) then any orbit \(\gamma \) of the vector field in the domain G with \(0<\theta <\frac{\pi }{2}\) is of one of the following types:
-
Fixed: \(\gamma \) is one of the fixed points \(O_+\) or \(O_-\).
-
Type I: A separatrix with \(L^{\pm }(\gamma ) = O_{\mp }\) and \(L^{\mp }(\gamma ) = S_i\), spiralling around \(O_-\) and \(O_+\).
-
Type II: A curve with \(L^+({\gamma })=O_-\) and \(L^-({\gamma })=O_+\), spiralling into both.
Theorem 3.8
(Orbit Types B) If \(n\ge 4g\) and \((g,m_1,m_2)\) is stable, then any orbit \(\gamma \) of the vector field in \(0< \theta < \frac{\pi }{2}\) is of one of the following types:
-
Fixed: \(\gamma \) is one of the fixed points \(O_+\) or \(O_-\).
-
Type I: \(\gamma \) is a separatrix with \(L^{\pm }(\gamma ) = O_{\mp }\) and \(L^{\mp }(\gamma ) = S_i\), decreasing/increasing monotonically to \(O_\pm \).
-
Type II:
-
(a)
\(\gamma \) exits \(O_+\) to the right and enters \(O_-\) from the left, crossing both the line \(\alpha = 0\) and \(\alpha = -\pi \).
-
(b)
\(\gamma \) exits \(O_+\) to the left and enters \(O_-\) from the left or \(\gamma \) exits \(O_+\) to the right and enters \(O_-\) from the right, crossing \(\gamma \) \(\alpha = 0\) or \(\alpha = -\pi \) respectively.
-
(a)
We now discuss how to determine for which triples \((g,m_1,m_2)\) the separatrices \(\gamma _1\) and \(\gamma _3\) cross the vertical line \(\theta =\theta ^*\). Recall, we call these triples stable. We already know they always cross whenever \(n<4g\) so we only need to consider \(n\ge 4g\). Further, the map \((\theta ,\alpha )\rightarrow (\frac{\pi }{2}-\theta ,-\alpha )\) maps the vector field generated by \((g,m_1,m_2)\) to the one generated by \((g,m_2,m_1)\) and the separatrix \(\gamma _1\) to \(\gamma _3\), thus it suffices to consider the behaviour of \(\gamma _1\). One proceeds by constructing curves from \(S_1\) to \(O_-\) which \(\gamma _1\) does not cross. Since no orbit can cross from above the \(\alpha =0\) line to below it before \(\theta ^*\) such a boundary would show that \(\gamma _1\) goes directly to \((\theta ^*,0)\) and does not cross the line \(\theta =\theta ^*\). One considers a family of potential boundaries \(B_a\) and reduces the question of whether they are boundaries to a question about the positivity of a certain polynomial on an interval. The results are summarised in the following theorem, for details we refer to [20].
Theorem 3.9
For \(n\ge 4g\), \(\gamma _1\) only crosses the \(\theta =\theta ^*\) for the triples (2, 1, 5) and (4, 1, 6). Consequently, all triples with \(n\ge 4g\) and \((g,m_1,m_2)\ne (2,1,5),(4,1,6)\) are stable.
4 Profile Curves
We now use our knowledge about orbits of the vector field to classify profile curves and the corresponding minimal surfaces.
Recall a profile curve \(\Gamma = (r(t),\theta (t),\alpha (t))\) corresponding to an orbit \(\gamma = (\theta (t),\alpha (t))\) is a curve where r(t) solves
Since r is positive and \( \sin 2\theta \) are positive, r has a critical point only when \(\alpha = (k+1/2)\pi , k\in {\mathbb {Z}}\). These points are always minima.
Theorem 4.1
(Profile curves A) Any profile curve \(\Gamma \) corresponding to an F-invariant minimal surface in \({\mathbb {R}}^n\) with a triple with \(n<4g\), is of one of the following types:
-
Ray: \(\Gamma \) is the ray \(\Gamma ^*:\theta = \theta ^*= \arctan \sqrt{\frac{m_1}{m_2}}\), compare (3.2).
-
Type I: One end of \(\Gamma \) intersects either the x-axis or the y-axis orthogonally and the other end is asymptotic to \(\Gamma ^*\). Further, r(s) increases monotonically and \(\Gamma \) intersects \(\Gamma ^*\) infinitely often.
-
Type II: Both ends of \(\Gamma \) are asymptotic to \(\Gamma ^*\) and r(s) has a unique minima. Further, \(\Gamma \) intersects \(\Gamma ^*\) and itself infinitely many times.
Proof
In the fixed case
for all time. So,
where C is a positive constant, thus we get a ray.
For a Type I orbit,
thus the resulting profile curve will be perpendicular to the x or y axis. Further,
and \(\theta \) crosses the \(\theta =\theta ^*\) line infinitely often. Further, \(-\frac{\pi }{2}< \alpha < \frac{\pi }{2}\), thus \(\frac{dr}{d\theta }>0\) and approaches Cr,thus the profile curve approaches the ray \(\Gamma ^*\) as \(t\rightarrow \infty \), intersecting it infinitely often.
For a Type II orbit,
and
Further, the orbit crosses the \(\theta =\theta ^*\) line infinitely often in both directions. On the line \(\alpha = -\frac{\pi }{2}\), we have \(\frac{\mathrm{d}\alpha }{\mathrm{d}t}=m \sin (2\theta )>0\) thus no curve can cross this line from above. Further, for a profile curve, r is stationary precisely when the corresponding orbit crosses this line. Thus, on any Type II profile curve there is a unique point where r is stationary. As
we have
thus the profile curve is doubly asymptotic to \(\Gamma ^*\), crossing it infinitely many times in both directions. \(\square \)
Theorem 4.2
(Profile curves B1) Any profile curve \(\Gamma \), corresponding to an F-invariant minimal surface in \({\mathbb {R}}^n\) with a stable triple \((g,m_1,m_2)\) (not (2, 1, 5),(4, 1, 6)) with \(n\ge 4g\), is of one of the following types:
-
Ray: \(\Gamma \) is the ray \(\Gamma ^*:\theta = \theta ^*\).
-
Type I: One end of \(\Gamma \) intersects either the x-axis or the y-axis orthogonally and the other end is asymptotic to \(\Gamma ^*\). Further, r(s) increases monotonically and \(\Gamma \) never intersects \(\Gamma ^*\).
-
Type II: Both ends of \(\Gamma \) are asymptotic to \(\Gamma ^*\) and r(s) has a unique minima. Further, \(\Gamma \) intersects \(\Gamma ^*\) at most once. Further, \(\Gamma \) never intersects itself.
Proof
If the orbit is fixed, the proof is identical that in the proof of Theorem 4.1.
If the orbit is Type I, the proof is similar to above except since the orbit does not cross the line \(\theta =\theta ^*\), it never intersects the ray \(\Gamma ^*\).
If \(\gamma \) is Type II, the proof that \(\Gamma \) is asymptotic to \(\Gamma ^*\) and has a unqiue minima still holds. Further, it only intersects \(\Gamma ^*\) at most once, since \(\frac{\mathrm{d}\theta }{\mathrm{d}t}<0\) for \(-\pi<\alpha <0\) and the curves \(\gamma _1,\gamma _4\) prevent \(\gamma \) from crossing the \(\theta =\theta ^*\) line again.
To show \(\Gamma \) never intersects itself, we proceed as follows. If \(\Gamma \) intersects \(\Gamma ^*\) we can split it into two sections, \(\Gamma ^+\) and \(\Gamma ^-\), such that both lie strictly on one side of \(\Gamma ^*\). Assume w.l.o.g that \(\Gamma \subset \{(r,\theta ): \theta <\theta ^*, (r,\theta )\in D_g\}\). Fix one profile curve corresponding to \(\gamma _1\). We can write this curve as \(r_1(\theta )\), \(0<\theta <\theta ^*\). Consider the function
The level sets of this function are exactly the Type I profile curves corresponding to \(\gamma _1\). Assume \(\Gamma (t_0)=\Gamma (t_1)\). Then by Rolle’s theorem there exits a point \(x_0\) on \(\Gamma \), such that \(\Gamma \) is tangent to a level set of f at \(x_0\). This is a contradiction since \(\Gamma \) is of Type II but the level sets of f are Type I and since profile curves are geodesics, this violates the uniqueness of geodesics. \(\square \)
Theorem 4.3
(Profile curves B2) Any profile curve \(\Gamma \), corresponding to an F-invariant minimal surface in \({\mathbb {R}}^n\) with an unstable triple \((g,m_1,m_2)\) ((2, 1, 5),(4, 1, 6)) with \(n\ge 4g\), is of one of the following types:
-
Ray: \(\Gamma \) is the ray \(\Gamma ^*:\theta = \theta ^*\).
-
Type I: One end of \(\Gamma \) intersects either the x-axis or the y-axis orthogonally and the other end is asymptotic to \(\Gamma ^*\). Further, r(s) increases monotonically and \(\Gamma \) intersects \(\Gamma ^*\) at most once.
-
Type II: Both ends of \(\Gamma \) are asymptotic to \(\Gamma ^*\) and r(s) has a unique minima. Further, \(\Gamma \) intersects \(\Gamma ^*\) at most once.
Proof
The proof is identical to the stable case, except in the following cases.
In the Type I case, since one \(\gamma _i\) can cross the line \(\theta = \theta ^*\) once, \(\Gamma \) can intersect the ray \(\Gamma ^*\). In the Type II case, the argument for embeddedness fails. \(\square \)
5 Free Boundary Minimal Surfaces
We can now use the results from previous sections to construct F-invariant free boundary minimal surfaces in the unit ball. We say a smooth submanifold \(\Sigma \subset B^k(1)\) is a free boundary minimal surface in \(B^k(1)\) if \(\Sigma \) is minimal, \(\partial \Sigma \subset \partial B^k(1)\), and \(\Sigma \) intersects \(\partial B^k(1)\) orthogonally along \(\partial \Sigma \). In Sect. 2.3 we proved a reduction theorem, showing that to find F-invariant minimal surfaces in \({\mathbb {R}}^n\), it suffices to study so called profile curves. The equations describing these profile curves just depend on the triple \((g,m_1,m_2)\), where g is the number of distinct principal curvatures associated to the isoparametric hypersurface corresponding to F and \(m_1\),\(m_2\) are the two multiplicities of these curvatures. The condition that \(\Sigma \) intersects \(\partial B^k(1)\) orthogonally along \(\partial \Sigma \) immediately translates to the same condition on profile curves. Thus, we say a profile curve \(\gamma \) in \(D_g\) is a free boundary profile curve if for all t such that \(\left\Vert \gamma (t)\right\Vert = 1\), \(\gamma (t)=\gamma '(t)\). In this context we construct two families of free boundary minimal surfaces: \(\Sigma _{g,m_1,m_2}^k\) and \(\Omega _{g,m_1,m_2}\). \(\Sigma _{g,m_1,m_2}^k\) is constructed in [20] and we simply repeat its construction. A special case also appears in [12]. The family \(\Omega _{g,m_1,m_2}\) is based on a construction from [12] but, to our knowledge, is completely new in this generality. A full list of triples satisfying the conditions is provided in Sect. 2.2 (Figs. 3, 4, 5, 6, 7, 8, 9).

The fundamental region G

Typical orbits when \(n<4g\)

Typical orbits when \(n\ge 4g\)

The barrier \(B_a\)

Profile curves for \(n<4g\)

Profile curves for \(n\ge 4g\)

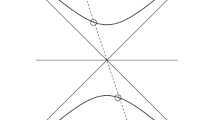
The construction in Theorem 5.1.2
Theorem 5.1
Given an isoparametric hypersurface in \({\mathbb {S}}^{n-1}\) with corresponding triple \((g,m_1,m_2)\) where \(n=\frac{m_1+m_2}{2}g+2\), we can construct F-invariant free boundary minimal surfaces in \({\mathbb {R}}^n\) in the following ways:
-
(1)
If \(n<4g\), for all natural numbers k we can construct a free boundary minimal surface \(\Sigma _{g,m_1,m_2}^k\).
-
(2)
If \((g,m_1,m_2) \ne (2,1,5), (4,1,6)\) and \(n\ge 4g\), we can construct a free boundary minimal surface \(\Omega _{g,m_1,m_2}\).
Proof
Case 1: Note that the condition \(\gamma (t)=\gamma '(t)\) is equivalent to \(\alpha (t)=k\pi \), \(k\in {\mathbb {Z}}\). Consider the separatrix \(\gamma _1\). For \(n<4g\), \(O_-\) is focal so we know \(\gamma _1\) crosses the line \(\alpha =0\) infinitely many times. Number the intersection times \(t_k\). Consider the profile curve \(\sigma ^k(t)=(r(t),\theta (t),\alpha (t))\) in \(D_g\) corresponding to \(\gamma _1\) with \(r(t_k)=1\). Since \(\gamma _1\) stays within \(-\frac{\pi }{2}\le \alpha \le \frac{\pi }{2}\), r(t) is strictly increasing, so this is the only point with \(r(t)=1\). Thus this is a free boundary profile curve. We can do this for all k, \((g,m_1,m_2)\) with \(n<4g\), thus we can construct \(\Sigma _{g,m_1,m_2}^k\).
Case 2: Consider the family of profile curves \(\Gamma _\epsilon = (r(t),\theta (t),\alpha (t))\) which satisfy
Consider the points \(t_+,t_0\) and \(t_-\), such that \(\alpha (t_+)=0\), \(\alpha (t_0)=-\frac{\pi }{2}\) and \(\alpha (t_-)=-\pi \). These times exist since this these curves cannot be separatrices. We want to construct a curve \(\Gamma \) such that \(r(t_-)=r(t_+)\).
For \(\epsilon <\frac{\pi }{2}\), r(t) is increasing for \(t\in (0,t_+)\), thus \(r(t_+)>\frac{1}{2}\) as \(\epsilon \rightarrow 0\). By smooth dependence of ODE solutions on initial conditions, we have \(\Gamma _\epsilon \rightarrow \Gamma ^*\) as \(\epsilon \rightarrow 0\). Thus, the minima of \(\Gamma _\epsilon \) approaches 0, thus there exists a sequence \(\epsilon _k\rightarrow 0\) such that \(r(t_0(\epsilon _k))\rightarrow 0\). If we consider the Euclidean arc-length parametrization s of \(\Gamma \) we have
We know
There is a curve entering \(O_-\) from the right which does not intersect the \(\theta = \theta ^*\) axis, thus \(\theta (t)\) is bounded away from \(\frac{\pi }{2}\) for all \(\epsilon \). Thus, \(\frac{\mathrm{d}\alpha }{\mathrm{d}s}\) is bounded.
As \(\epsilon \rightarrow 0\), \(\theta (t_0),\theta (t_-)\rightarrow \frac{\pi }{2}\) and for \(\theta > \theta ^*\) the two summands in (5.1) have the same sign, so if we show one of them is always bounded below by a constant, the expression in the brackets will be bounded away from 0. Near the line \(\alpha =-\frac{\pi }{2}\), we have \(-(n-1)\sin \alpha >0 \) uniformly and elsewhere \(H(\theta )\cos \alpha >0\) uniformly. Since \(r>r(t_0)\), we know \(\min _{s_-\le s\le s_0}\frac{\mathrm{d}\alpha }{\mathrm{d}s}\rightarrow \infty \) as \(\epsilon \rightarrow 0\). This implies \(\Delta r\rightarrow 0\) and further \(r(t_-(\epsilon ))\rightarrow 0\) so \(r(t_-)<r(t_+)\) for some \(\epsilon \). Repeating the same argument with \(\epsilon \rightarrow \pi \), we get \(r(t_-)>r(t_+)\) for some \(\epsilon \). By continuity, there must exist an \(\epsilon \) such that \(r(t_-(\epsilon ))=r(t_+(\epsilon ))\). The curve \(\Sigma =\Gamma _\epsilon \) is then a free boundary curve. We can do this for all \((g,m_1,m_2)\) with \(n\ge 4g\), thus we can construct \(\Omega _{g,m_1,m_2}\). \(\square \)
References
Abresch, U.: Isoparametric hypersurfaces with four or six principal curvatures. Math. Ann. 264, 283–302 (1983)
Alencar, H.: Minimal Hypersurfaces of \({\mathbb{R}}^{2m}\) Invariant by \({SO}(m) \times {SO}(m)\). Trans. Am. Math. Soc. 337, 129–141 (1993)
Alencar, H., Barros, A., Palmas, O.: \({O}(m) \times {O}(n)\)-Invariant Minimal Hypersurfaces in \({\mathbb{R}}^{m+n}\). Ann. Glob. Anal. Geom. 27, 179–199 (2005)
Allard, W.K.: On the first variation of a varifold. Ann. Math. 95, 417–491 (1972)
Baird, P., Wood, J.C.: Harmonic Morphisms Between Riemannian Manifolds. Oxford University Press, Oxford (2008)
Cartan, É.: Sur des familles remarquables d’hypersurfaces isoparamétriques dans les espaces sphériques. Math. Z. 45, 335–367 (1939)
Cecil, T.E.: Isoparametric and Dupin hypersurfaces. SIGMA 4 (2008)
Chi, Q.-S.: Sur des familles remarquables d’hypersurfaces isoparamétriques dans les espaces sphériques. J. Differ. Geom. 115, 225–301 (2020)
Dorfmeister, J., Neher, E.: Isoparametric hypersurfaces, case \(g=6\), \(m=1\). Commun. Algebra 13, 2299–2368 (1985)
Eells, J., Ratto, A.: Harmonic Maps and Minimal Immersions with Symmetries. Princeton University Press, Princeton (1993)
Ferus, D., Karcher, H., Münzner, H.E.: Cliffordalgebren und neue isoparametrische Hyperflächen. Math. Z. 177, 479–502 (1981)
Freidin, B., Gulian, M., McGrath, P.: Free boundary minimal surfaces in the unit ball with low cohomogeneity. Proc. Am. Math. Soc. 145, 1671–1683 (2017)
Hsiang, W.-Y., Lawson, H.B.: Minimal submanifolds of low cohomogeneity. J. Differ. Geom. 5, 1–38 (1971)
Lagrange, J.L.: Essai d’une nouvelle methode pour determiner les maxima et les minima des formules integrales indefinies. Miscellanea Taurinensia 2 325(1760), 173–199
Münzner, H.E.: Isoparametrische Hyperflächen in Sphären. I. Math. Ann. 251, 57–71 (1980)
Münzner, H.E.: Isoparametrische Hyperflächen in Sphären. II. Math. Ann. 256, 215–232 (1981)
Siffert, A.: A new structural approach to isoparametric hypersurfaces in spheres. Ann. Glob. Anal. Geom. 52, 425–456 (2017)
Stolz, S.: Multiplicities of Dupin hypersurfaces. Invent. Math. 138, 253–279 (1999)
Thorbergsson, G.: A survey on isoparametric hypersurfaces and their generalizations. Handbook of Differential Geometry 1 (2000)
Wang, Q.-M.: On a class of minimal hypersurfaces in \({\mathbb{R}}^n\). Math. Ann. 298, 207–251 (1994)
Wang, Q.-M.: Isoparametric maps of Riemannian manifolds and their applications. Adv. Sci. China 2 (1998)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The first author gratefully acknowledges the supports of the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - Project-ID 427320536 - SFB 1442, as well as Germany’s Excellence Strategy EXC 2044 390685587, Mathematics Münster: Dynamics-Geometry-Structure. Most of the work was done when the second-named author wrote his Master thesis under the supervision of the first-named author at the University of Bonn. Both authors would like to thank the anonymous referee for very valuable suggestions.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Siffert, A., Wuzyk, J. A Family of Free Boundary Minimal Surfaces in the Unit Ball. J Geom Anal 32, 215 (2022). https://doi.org/10.1007/s12220-022-00957-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12220-022-00957-5