
Abstract
This paper focusses on intra- and inter-species connections between diatoms; hard bioglass microalgae that adhere through the secretion of sticky extracellular polymeric substances (EPS). We identify entirely new diatom attachment mechanisms, and the associated structures that develop from them. Further, we consider these findings in light of potential strategies for the self-assembled manufacture of micro-bio machine parts, and discuss their possible first-order end uses.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
R&D efforts into micro-machine design is on an upward trajectory. This is because micro-machines are understood to have strong exploitation potential within high impact areas, Sitti [1]. One area receiving greater attention involves the integration of biological organisms to micro-machine design. This is because some of the challenges in micro-machine development including; propulsion, energy/power creation, and sense/response mechanisms, are already naturally present in biological microorganisms. As such, microorganisms are seen as potential solutions to the numerous scaling-challenges associated with the development of functional micro-machines and robots.
The mobility of micro-robots for example, is one area showing considerable promise, since many micro-organisms have inherently advanced biological mechanisms that enable self-energised movement. Ghanbari and Bahrami [2] proposed that there are benefits in exploiting the ciliary swimming mechanism of Paramecium sp., and by doing so, circumventing well-known scaling difficulties that relate to micro-robot mobility. The novel cilia-based methodology for enabling swimming in a micro-robot showed higher simulated efficiency in propulsion than an equivalent flagella-based swimming micro-robot. This was reported to be because the length and diameter of cilia are much larger than those of flagella, and as such they have higher propulsive forces at equivalent accelerations. Xu et al. [3] considered helically swimming micro-robots with potential in minimally invasive in vivo medical applications. They concluded that the effectiveness of helical micro-swimming is affected primarily by the angle of the helical twist, as opposed to other geometrical parameters such as the width and thickness of the helical object. Khalil et al. [4] experimentally demonstrated that a sperm driven microtubule could be used as a micro-bio robot with applications in drug delivery and as a micro-actuator. The direction of travel could be controlled using a magnetic force guiding the microtubule, and the authors further proposed that the efficiency of the micro-bio robot might theoretically be increased by reducing the length of the microtubule, as it would result in a larger (tail) beat-amplitude. Hogg [5] proposed that the design of shape-changing micro-bio robots could be guided by their energy dissipation in viscous biological fluids, since surface forces direct both translational and rotational kinematics.
Diatoms have gained recent popularity as cellular structures suitable for use in micro-bio robotics. Diatoms are eukaryotic microalgae that grow strong, hard, bio-glass (silica-rich) exoskeletons known as frustules [6, 7]. The glassy frustules are attractive in micro-bio robotics as they are rigid hollow bodies, ornamented with systematically arranged nano-pores, which makes them ideal in a number of micro-bio robot applications. These might include but are not limited to; the development of self-propelled micro-motors [8], microscale biosensor platforms [9] and as drug delivery vehicles [10]. Panda et al. [8] made use of diatoms with geometrical anisotropy to enable movement in a single direction under a low concentration of H2O2, which could then be terminated by EDTA addition. Gale et al. [9] functionalised Cyclotella frustules with model antibody rabbit immunoglobulin G (IgG) to amplify the intrinsic blue photoluminescence by a factor of six. Delalat et al. [10] genetically engineered the diatom Thalassiosira pseudonana, to exhibit GB1 protein on the silica surface, which could then bind to targeted antibodies on cancer cells, and were able to interact electrostatically with liposome-encapsulated cancer drug molecules.
Diatoms have essentially been considered thus far, as entire micro-bio machines. To date there are no records of micro-bio robots that are composed of conjoined parts. Conjoining micro-parts with specific geometries increases our potential for building larger, structurally and functionally more complex, micro-bio machines. Diatoms may be enablers in this regard, as they are extremely stiff [11], yet have distinct surface flexibility [12] via an extracellular polymeric substance (EPS) layer that attaches the frustule to other materials. EPS is usually produced by pennate diatoms since they possess raphe, in contrast to centric diatoms that tend to be entangled within a biofilm matrix due to the absence of raphe in their cells [13]. Attached diatoms are found in almost all environments, both on land and in water [14], and their biological functions include stabilising the intertidal mudflat [15] and protecting the diatom from salinity induced stresses [14]. They are fundamentally considered an expensive nuisance in the maritime sector [16] as they are highly effective biofouling organisms. Nevertheless, their properties of biofouling in combination with their excellent mechanical properties have also been identified as beneficial in micro-bio technologies [17] as they have a combination of stiff, compliant and sticky properties. The properties of diatom adhesion varies with respect to species [18, 19] and attachment substrate [20]. Atomic force microscopy (AFM) can be a useful means of characterising the strength of EPS adhesion. Higgins et al. [21] reported pull-off forces of 3.58 ± 1.97 nN of EPS from the girdle of the diatom Craspedostauros australis, while in the raphe region, the adhesion forces were significantly higher at 15.4 ± 11.2 nN, with maximum values recorded at 60nN. These forces are similar to those required to pull polypropylene (PP) from silica glass (14nN), which is strongly correlated to van der Waals interactions [22, 23], though electrostatic interactions have also been quantified between diatom EPS molecules and silica [12]. Though the Young’s modulus of EPS varies from species to species, it can generally be observed as being within range of ca. 0.5 MPa, confirming its bulk properties are similar to those of other soft polymers [24].
The sticky properties of diatoms allow them to connect to one another, by which means they form colonies. Cell-to-cell attachment has been studied extensively for diatoms of the same species (intra-species attachment) including; Phaeodactylum tricornutum [25], Thalassiosira [26] and Skeletonema costatum [27]. Though diatoms also attach between species (inter-species attachment), there are only a handful of studies covering their attachment characteristics, and for only a small number of interacting species. Amphora and Cymbella are for example, critical contributors to the development of biofilms. Amphora acts essentially, as an initial coloniser forming a direct substrate-EPS linkage for stalked Cymbella, which in turn traps other centric and non-EPS forming diatoms [13]. Manoylov [28] demonstrated that the stalked structure of Cymbella facilitates Achnanthidium attachment, allowing both species to occupy shaded environments, and consequently winning space over its local competition, Cocconeis placentula. Amphora and Nitzschia are also known to interact and attach, such that the former selectively chooses the latter species as a host, utilising the motile character of Nitzschia to transport itself as an attached diatom to a more favourable environment [29, 30].
In this paper, we consider diatom interactions as a tangible future approach to the construction of micro-bio machines, robots, and their parts. Diatoms are hard-bodied but have flexible attachment polymers (EPS), which potentialises their utility as stiff-compliant-stiff micro-bio machine parts. The Young’s modulus of diatom frustules typically ranges between 7 and 20GPa [31] while its strength in tension and compression has been recorded as high as 560 MPa and 680 MPa, respectively [32]. Importantly, we consider the characteristic geometries that result from both inter- and intra-species diatom attachments (using both pennate and centric diatoms), as these will guide the design functionality of self-assembling multi-cellular-component micro-bio machines.
2 Materials and methods
2.1 Cell culturing
Five species of microalgae were cultured in species-specific media for optimal growth. Phaeodactylum sp. (pennate), Skeletonema costatum (centric) and Nitzschia sp. (pennate) obtained from Situbondo Marine Aquaculture, East Java were cultured in f/2 medium (1 mL/L NaNO3, 1 mL/L NaH2PO4, 1 mL/L Na2SiO3, 1 mL/L trace metal solution and filtered natural seawater) pH 7.5, Navicula sp. (pennate) obtained from Jepara Marine Aquaculture, Central Java was cultured in Walne medium (1 mL/L nutrient solution, 1 mL/L stock vitamin solution and 1 L filtered natural seawater) pH 7.5 [33], while Thalassiosira sp. (centric) obtained from Gondol Marine Aquaculture, Bali was cultured in Na medium (3 mL/L NaNO3, 1 mL/L Na2HPO4, 1 mL/L Na2SiO3, 1 mL/L stock vitamin solution) pH 8.5 (Gondol Marine Aquaculture, 2018). The culturing process was performed under 3000 lx lighting at 24 °C in several 500 mL glass bioreactors under a constant stream of air bubbles to ensure diatom cells in the media were adequately agitated. After the diatoms reached their exponential growth phase, the colonies formed by attaching intra- and inter-species diatoms were observed under both light and phase-contrast microscopes.
2.2 Intra and inter-species diatom cultures
Intra-species cultures included the following individual diatom species; Phaeodactylum sp., Nitzschia sp., Navicula sp., Thalassiosira sp. and Skeletonema costatum. Each diatom species was cultured individually in a 500 mL bioreactor with the medium described above for the specific species. Intra-species diatoms reached an exponential phase of growth within 7 days, after which these cultures were used to make inter-species cultures. Inter-species cultures were conceived by mixing 100 mL of diatom culture from a specific individual diatom species with 100 mL diatom culture from different specific individual diatom species. Each inter-species culture consisted of only two specific individual species of diatom since the specific attachments and geometries would be easier to assess in this way. The specific paired diatom couplings are shown in Table 1.
Both inter- and intra-species diatoms were cultured for seven days, after which the diatoms reach their exponential growth phase.
2.3 Light and phase-contrast microscopy
Following seven days of growth, diatom cultures were mounted onto microscope slides together with immersion oil on the cover glass to enhance the resolving power of the microscope. The slides were then observed using an Olympus CX22LED light microscope and an Olympus BX40 phase-contrast microscope with a × 100 objective. The images were captured using an Optilab device and camera. Light microscopy was used for early examination of the diatoms, after which the phase contrast microscope was used to differentiate the bioglass and EPS phases of both inter- and intra-species attached diatoms.
2.4 Image analysis
Micrograph images from both light and phase-contrast microscopy were probed using image analysis softwares Fiji v.1.52p and ImageRaster. This enabled a clearer view of the connections that arose between diatoms in both inter- and intra-species attachments. Fiji v.1.52p was used to superimpose images captured using a different aperture focus, while ImageRaster was used to correctly scale the images. Since diatoms are not flat, images were taken using different aperture focuses so that important attachment geometries could be captured at different depths in 3-dimensional space. Images were overlaid in Fiji v.1.52p using different colours as it made it easier to differentiate between the different depths of focus, as well as between the frustule and EPS. The scaling was calibrated in each image using the pre-calibrated scale bar from the original microscope image to avoid dimensioning errors.
3 Results and discussion
3.1 Biological attachments
Intra-species diatom attachments revealed several interesting connection points and resultant diatom-diatom geometries (Figs. 1, 2 and 4). Inter-species attachments were predominantly found to occur between raphid diatoms at their tips, to the walls of cylindrical and centric diatoms (Figs. 5 and 6).

a-d Intra-species connection patterns between raphid diatoms were shown to form four different attachment geometries (here: Phaeodactylum sp.). Scale bar = 10 μm in all images

Intra-species connection patterns between raphid diatoms (here: Nitzschia sp. (a-c) and Navicula sp. (d)). Scale bar = 5 μm in all images
Intra-species attachments between Phaeodactylum sp. revealed four different patterns of connection (Fig. 1). In the first pattern, the cells connected across the entire length of each Phaeodactylum sp. cell (both the two tip regions and the central region) (Fig. 1a1-a2), and this pattern of connection was also noted to occur in intra-species connections between Nitzschia sp. cells (Fig. 2a). Another intra-species attachment pattern observed between Nitzschia sp. was similar to that in Fig. 2a, but differed in that it only connected at the centre of the adjoined diatoms (Fig. 2b). Phaeodactylum sp. cells were also noted to attach at only the tip region, creating a V-shape (Fig 1b1-b2), which was also noted to occur between both Nitzschia sp. cells (Fig 2c1-c3) and Navicula sp. cells (Fig. 2d). Intra-species Phaeodactylum sp. cells also showed tip-to-tip attachments however, rather than forming V-shapes, they formed a staggered chain-like geometry (Fig. 1c1-c2). Contrarily, another tip-to-tip pattern observed between intra-species Phaeodactylum sp. cells formed a cross-like structure of four diatoms or a linear tip-linked structure between two diatoms (Fig. 1d1-d3).
Both Phaeodactylum sp. and Navicula sp. are classified as raphid diatoms, since they possess raphe in their frustules [34, 35] from which EPS is secreted. Nevertheless, raphid diatoms are reported to secrete EPS through the raphe, as well as through their girdles and through other pores, such as apical pores [35, 36]. The location of secreted EPS is a factor determining how the diatoms will attach to one another, and the consequent geometries that form. For example, we note that raphe secreted EPS connects only at the centre of the valve face [37] (cf. Fig. 2b); girdle secreted EPS connects in only the region around the tip (cf. Fig. 1b and c), and apical pore secreted EPS facilitates specific connections at only the very end of a raphid diatom (cf. Fig. 1d). Figure 3 shows the locations of the girdle, apical pores, raphe and valves in a raphid diatom.

Schematic of a raphid diatom showing the locations of the raphe, valves, apical pores and the girdle
Figure 4 shows the results of intra-species connections between cylindrical centric diatoms. Thalassiosira sp. cells were noted to join directly at the valve face (Fig. 4a1-a2). This type of attachment occurs between centrally strutted process secreted β-chitin fibrils [36,38]. Fryxell et al. [26] noted that some Thalassiosira sp. formed gelatinous colonies, while certain other species of Thalassiosira, such as T. weissflogii, cannot connect unless the connections are facilitated by EPS secreting bacteria [39, 40]. There is therefore importance in committing to a focussed species selection during the design process of self-assembling cells. Unlike Thalassiosira sp., S. costatum connects through a siliceous structure that extends from tubular processes called fultoportulae [41, 42]. These connections were evident in our intra-species cultures of S. costatum and examples are provided in Fig. 4b1-b2.

Intra-species connections between the cylindrical centric diatoms (a) Thalassiosira sp. and (b) Skeletonema costatum. Scale bar = 10 μm in all images
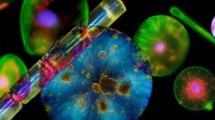
Interestingly, when we mixed two different araphid species of diatoms in a single culture (Thalassiosira sp. and S. costatum), we found that they would not connect to each other (Fig. 5a). In turn, attachments between raphid and araphid diatoms occurred for the most part, between the tips of the raphid diatoms and the sides of the centric diatoms (Figs. 5b-e and 6a-b).

Inter-species attachment between raphid and araphid diatoms: aThalassiosira sp. (upper) and Skeletonema costatum sp. (lower); bThalassiosira sp. (centric cell in the middle) and Phaeodactylum sp. (pennate cells attaching to centric cell by their tips); cThalassiosira sp. (cylindrical cell) and Navicula sp. (pennate cells); dS. costatum (cylindrical cells) and Navicula sp.; (pennate cells); eNitzschia sp. (upper) and Navicula sp. (lower). Scale bar = 5 μm in all images

Self-assembled branched structures generated between raphid and araphid diatoms (inter-species attachment). In (a) we see a Navicula sp. (pennate cell) attached by its tip to the side of a linear array of Thalassiosira sp. (cylindrical cells). In (b) we see Navicula sp. (pennate cells) attached linearly by their tips to each other, and at their extent to the side of a Thalassiosira sp. diatom. Scale bar = 5 μm in all images
Though both cylindrical species of Thalassiosira sp. and S. costatum were cultured together, they did not attach to one another (Fig. 5a). These cells only formed clusters of cells between their own species. By contrast, raphid-araphid diatoms did self-assemble together to form inter-species geometries. Phaeodactylum sp. for example would tend to connect to the side of the cylindrical Thalassiosira sp. via its (apical pore) tip (Fig. 5b1-b2). Navicula sp. (Fig. 5c1-c8) were noted to connect anywhere to Thalassiosira sp. via both its tip region (girdle/apical pore) and its centre (valve). Nitzschia sp. was observed to connect to Navicula sp. via its tip region (Fig. 5e), indicating the importance of the EPS secretions from the apical pores for attachment, Hoagland et al. [36].
Girdle EPS initiated attachments [35] were also noted in Navicula sp./S. costatum pairs (Fig. 5d1). Thus far, all observed attachment mechanisms between diatoms have been diatom-EPS-diatom (i.e. stiff-compliant-stiff structures). One specific pairing (S. costatum with Navicula sp.) exhibited a very different attachment mechanism. In this pairing, Navicula sp. mechanically interlocked itself between the fultoportulae of S. costatum (Fig. 5d2), creating a diatom-diatom (i.e. stiff-stiff) connection, a combined schematic and CAD interpretation for which is provided in Fig. 7.

Schematic drawing and CAD interpretation of the interlocking of Navicula sp. between the fultoportulae of S. costatum, resulting in a stiff-stiff attachment
In nature, both intra- and inter-species diatom attachments may be a way of advancing species success in a competitive environment [43], since colony formation is hypothesised to be critical in this respect [44, 45]. This said, cell-to-cell attachment depends largely on cellular motility, and raphid diatoms from the genera Phaeodactylum, Navicula and Nitzschia are noted herein to have greater characteristics of motility than cylindrical centric Skeletonema and Thalassiosira species.
3.2 Conceptual design of micro-bio machine parts
This section aims to propose possible applications of primarily, the inter-species cellular connections observed and discussed in the previous section. Much of the previous research on micro-bio robots consider individual cells as motile biological robotic carries/transporters [2, 4, 8, 10]. The cellular connections elucidated herein are entirely different in structure, properties and purpose of previously proposed conceptual designs of micro-bio robots. Our connected diatoms self-assembled into both stiff-compliant-stiff, and stiff-stiff (interlocked) structures. The stiff-compliant-stiff structures have the advantage of having flexible EPS polymer joints that enable coupled rotations and translations of the adjoined stiff bioglass diatoms. The stiff-stiff (interlocked) diatoms are micro-scale bioglass orthogonally connected structures, presumably with no rotational or translational freedom.
Our first conceptual designs were inspired by raphid-araphid interactions, whereby the raphid diatom tip attaches to the body of a cylindrical araphid diatom. The final structures resemble micro-bio propellers, Fig. 8, with a rotational point at the centroid of the planar end of the cylindrical araphid diatom. Rotation for propulsion could theoretically be borne from magnetic sources as reported by Fu et al. [46] and Todd et al. [47], or through the incorporation of cilia micro-bio technologies as reported by Ghanbari and Bahrami [2]. A micro-bio machine part such as this, could hypothetically, form part of a device that is either powered to turn and thus propel, or, that turns in accordance with local fluid movements to produce power for other micro-devices. From the point of view of propulsion, hydrodynamic motion at the microscale and below, occurs at low Reynolds numbers (laminar), and requires that the ‘swimming object’ is essentially able to outrun diffusion [48] such that l > D/v where l is the swim-length, D is the diffusion constant (10−5 cm2/s in water) and v is the swimming velocity. Rotating swimmers such as E. coli for example, are able to outrun diffusion reaching speeds of ca. 30 μm/s by rotating their bodies at ca. 20 Hz [49].

a Optical micrograph of a propeller-like structure created by the self-assembly of raphid and araphid diatoms (scale bar = 5 μm ), (b-c) conceptual design of an underwater micro-bio propeller inspired by structure in (a), (d) optical micrograph showing inter-species connections between pennate and cylindrical diatoms, as well as intra-species attachments between pennate diatoms (scale bar = 5 μm ), (e) hypothetical utility example of as an underwater microscopic propeller inspired by the structure in (d)
We also noted unique stiff-compliant-stiff arm-like structures that formed through the inter-species connections of Thalassiosira sp. (sides) and Navicula sp. tips, followed by intra-species attachments between Navicula sp. cell-tips, Fig. 9a. We hypothesise these structures show potential as micro-bio robotic arms (Fig. 9b) as the cellular structures themselves are hard (bioglass diatoms), while the connections between them are flexible EPS polymer. As such, the arms have a degree of translational and rotational freedom.

a Optical micrograph of both inter- and intra-species connections created by Thalassiosira sp. and Navicula sp. and (b) micro-arms modelled as a part of a micro-bio robot inspired by the connections shown in Fig. 8a. Scale bar = 5 μm
The interlocked connection between S.costatum and Navicula sp., as shown in Fig. 10, provides inspiration for stiff-stiff micro-bio machine applications. In this inter-species connection, half of the body of Navicula sp. is mechanically interlocked between the fultoportulae of S.costatum (cf. Figure 7), both of which in combination create a stiff orthogonally structured assembly. Since these structures are both mechanically interlocked, and are likely to continue to secrete EPS, we can assume that these structures are well attached and thus physically very stable in their hook-like conformation. A stable stiff-stiff micro-hook has many potential applications. These might include micro-hooks used for climbing on micro-rough or soft surfaces, as a complementary part for micro-robotic arm, and attached in tandem to enable multi-hook devices for stable gripping micro-bio technologies, Fig. 10. The integration of such diatom assemblies into larger or connected systems could be possible using nanowire techniques reported by Agarwal et al. [50]. Using a wall-climbing robot equipped with hooked-claws and claw tips, as inspired by the spiny structures on cockroach legs, Xu et al. [3, 51] reported upon the importance of surface topography, material, and structure on robotic-climbing effectiveness. They moreover noted that the mobility of their robots was constrained despite being subjected to vibration. The implication is therefore, that size is a critical parameter in the design of a climbing robot, with smaller sized robots being lighter with respect to grip strength and less affected by its own inertia. Herein we postulate therefore, that due to their microscopic sizes, diatoms turned into mobile micro-bio robots, might exhibit improved grip and stability than larger robots.

Optical micrograph showing stiff-stiff interlocking between S.costatum and Navicula sp. and hypothesised micro-bio technologies including; micro-hook for micro-rough or soft-surface climbing, complementary parts of micro-bio robotic arms, and in tandem for use in micro- bio gripping technologies
4 Conclusions
This paper was concerned with intra- and inter-species attachments between self-assembling diatoms, and the structures that develop from them. We find several structures from both pennate and centric diatoms that provide inspiration for future micro-bio propellers, translating and rotating arms, and micro-hooks. Our results revealed that cell-to-cell attachments within the same species of raphid diatoms follow four typical, but fundamentally different patterns, while those occurring amongst cylindrical diatoms only attach at their valves in Thalassiosira sp., and via the siliceous structures of Skeletonema costatum. The connections formed between different species of diatom, by contrast, typically entailed raphid diatoms connected at their tips, to the sides of cylindrical diatoms. Our work shows there is potential in manufacturing micro-bio machine parts by the self-assembly of diatoms. Diatoms have hard bioglass shells and secrete soft, flexible polymeric substances, and as such, provide ideal possibilities for hard bodied micro-machines with flexible joints, or in the case of interlocking diatoms, hard-bodied micro-machine parts with unconventional shapes.
References
Sitti M (2017) Mobile microrobotics. MIT Press, Cambridge
Ghanbari A, Bahrami M (2011) A novel swimming microrobot based on artificial cilia for biomedical applications. J Intell Robot Syst 63:399–416
Xu T, Hwang G, Andreff N, Regnier S (2016). Influence of geometry on swimming performance of helical swimmers using DoE. J Micro-Bio Robot, 11(1–4): pp 57–66
Khalil ISM, Magdanz V, Sanchez S, Schmidt OG, Misra S (2014). Biocompatible, accurate, and fully autonomous: a sperm-driven micro-bio-robot. J Micro-Bio Robot, 9(3–4):79–86
Hogg T (2016). Energy dissipation by metamorphic micro-robots in viscous fluids. J Micro-Bio Robot, 11(1–4): 85–95
Strzepek RF, Harrison PJ (2004) Photosynthetic architecture differs in coastal and oceanic diatoms. Nature 403:689–692
Yang W, Lopez PJ, Rosengarten G (2011) Diatoms: self assembled silica nanostructures, and templates for bio/chemical sensors and biomimetic membranes. Analyst 136:42–53
Panda A, Reddy AS, Venkateswarlua S, Yoon M (2018) Bio-inspired self-propelled diatom micromotor by catalytic decomposition of H2O2 under low fuel concentration. Nanoscale 10:16268–16277
Gale DK, Gutu T, Jiao J, Chang C, Rorrer GL (2009) Photoluminescence detection of biomolecules by antibody - functionalized diatom biosilica photoluminescence detection of biomolecules by antibody-functionalized diatom biosilica. Adv Funct Mater 19:926–933
Delalat B, Sheppard VC, Ghaemi SR, Rao S, Prestidge CA, McPhee G, Rogers M-L, Donoghue JF, Pillay V, Johns TG, Kroger N, Voelcker NH (2015). Targeted drug delivery using genetically engineered diatom biosilica. Nat Commu, 6:8791
Subash G, Yao S, Bellinger B, Gretz MR (2005) Investigation of mechanical properties of diatom frustules using Nanoindentation. J Nanosci Nanotechnol 5:50–56
Sanka I, Suyono EA, Alam P (2017) The effects of diatom pore-size on the structures and extensibilities of single mucilage molecules. Carbohydr Res 448:35–42
Richard C, Mitbavkar S, Landoulsi J (2017). Diagnosis of the diatom community upon biofilm development on stainless steels in natural freshwater. Scanning, 5052646, p 13
Steele DJ, Franklin DJ, Underwood GJC (2014) Protection of cells from salinity stress by extracellular polymeric substances in diatom biofilms. J Bioadhesion Biof Res 30:987–998
Stal LJ, Brouwer JFC (2003) Biofilm formation by benthic diatoms and their influence on the stabilization of intertidal mudflats. Berichte Forschungszentrum Terramare 12:109–111
Callow JA, Callow ME (2011) Friendly fouling-resistant marine coatings. Nat Commun 2:210–244
Zusron M, Sanka I, Nuhamunada M, Damayanti Y, Nopitasari S, Kamila AD, Kusuma AB, Ningrum EFC, Rahmawati AR, Zakiyah N, Islami DA, Prabaswara CB, Adhikari M, Suyono EA, Alam P (2016) Glass coating natural Fibres by Diatomisation: a bright future for biofouling technology. Mater Today Commu 7:81–88
Gebeshuber IC, Thompson JB, Del Amo Y, Stachelberger H, Kindt JH (2002) In vivo nanoscale atomic force microscopy investigation of diatom adhesion properties. Mater Sci Technol 18(7):763–766
Harper MA, Harper JF (1967) Measurements of diatom adhesion and their relationship with movement. Br Phycol Bull 3:195–207
Holland R, Dugdale TM, Wetherbee R, Brennan AB, Finlay JA, Callow JA, Callow ME (2004) Adhesion and motility of fouling diatoms on a silicone elastomer. Biofouling 20(6):323–329
Higgins MJ, Crawford SA, Mulvaney P, Wetherbee R (2002) Characterization of the adhesive MucilagesSecreted by live diatom cells using atomic force microscopy. Protist 153:25–38
Dvir H, Jopp J, Gottileb M (2006) Estimation of polymer–surface interfacial interaction strength by a contact AFM technique. J Colloid Interface Sci 304:58–66
Jiang Y, Turner KT (2016) Measurement of the strength and range of adhesion using atomic force microscopy. Extreme Mech Lett 9:119–126
Higgins MJ, Sader JE, Mulvaney P, Wetherbee R (2003) Probing the surface of living diatoms with atomic force microscopy: the nanostructure and nanomechanical properties of layer1. J Phycol 39:722–734
Iwasa K, Shimizu A (1972) Motility of the diatom, Phaeodactylum tricornutum. Exp Cell Res 74:552–558
Fryxell GA, Gould RW Jr, Watkins TP (1984) Gelatinous Colonies of The Diatom Thalassiosira in Gulf Stream Warm Core Rings Including T . fragilis, sp. nov. Br Phycol J 19:141–156
Nayar S, Goh BPL, Chou LM (2005) Dynamics in the size structure of Skeletonema costatum (Greville) Cleve under conditions of reduced Photosynthetically available radiation in a dredged tropical estuary. J Exp Mar Biol Ecol 318:163–182
Manoylov KM (2009) Intra- and interspecific competition for nutrients and light in diatom cultures. J Freshwater Ecol 24:145–157
Bondoc KGV, Heuschele J, Gillard J, Vyverman W, Pohnert G (2016) Selective silicate-directed motility in diatoms. Nat Commun 7:1–7
Roubeix V, Coste M (2017) A case of close interspecific interaction between diatoms: selective attachment on a benthic motile species. Aquat Microb Ecol 80:55
Almqvist N, Delamo Y, Smith BL, Thompson NH, Bartholdson A, Lal R, Brzeznski M, Hansma PK (2001) Micromechanical and structural properties of a pennate diatom investigated by atomic force microscopy. J Microsc 202:518–532
Hamm CE, Merkel R, Springer O, Jurkocj P, Maier C, Prechtel K, Smetacek V (2003) Architecture and material properties of diatom shells provide effective mechanical protection. Nature 421:841–843
Andersen RA (ed) (2005) Algal Culturing Techniques. Elsevier Academic Press, Cambridge, pp 507–518
Wang J, Cao S, Du C, Chen D (2013) Underwater locomotion strategy by a benthic Pennate diatom Navicula sp. Protoplasma 250:1203–1212
Willis A, Chiovitti A, Dugdale TM, Wetherbee R (2013) Characterization of the extracellular matrix of Phaeodactylum tricornutum (Bacillariophyceae): structure, composition, and adhesive characteristics. J Phycol 49:937–949
Hoagland KD, Rosowski JR, Gretz MR, Roemer SC (1993) Diatom extracellular polymeric substances: function, fine structure, chemistry, and physiology. J Phycol 29:537–566
Borowitzka MA, Chiappino ML, Volcani BE (1977) Ultrastructure of a chain-forming diatom Phaeodactylum tricornutum. J Phycol 13:162–170
Stoermer EF & Julius ML (2003). Centric Diatoms. In: John D. Wehr & Robert G. Sheath Freshwater Algae North America: Ecology and Classification. Elsevier, London, pp 559–594
Crocker KM, Passow U (1994) Differential aggregation of diatoms. Mar Ecol Prog Ser 117:249–257
Gardes A, Iversen MH, Grossart H-P, Passow U, Ullrich MS (2011). Diatom-associated bacteria are required for aggregation of Thalassiosira weissflogii. The ISME Journal, 5:436–445
Castillo JA, Meave del Castillo ME, Hernández-Becerril DU (1995) Morphology and distribution of species of the diatom genus Skeletonema in a tropical coastal lagoon. Eur J Phycol 30:107–115
Round FE, Crawford RM, Mann DG (2007) Diatoms: biology and morphology of the genera. Cambridge University press, Cambridge, p 26
Verhaegh W, Aarts E, Korst J (2006) Intelligent algorithms in ambient and biomedical computing. Springer Netherlands, Dordrecht, p 16
Passy SI (2017) Diatom ecological guilds display distinct and predictable behavior along nutrient and disturbance gradients in running waters. J Aqua Botany 86:171–178
Rimet F, Bouchez A (2012) Life-forms, cell-sizes and ecological guilds of diatoms in European Rivers. Knowl Manag Aquat Ecosyst 406:1–12
Fu Q, Zhang S, Guo S, Guo J (2019) Performance evaluation of a magnetically actuated capsule microrobotic system for medical applications. Micromachines 9(12):641
Todd T, Zhen Z, Tang W, Chen H, Wang G, Chuang YJ, Deaton K, Pan Z, Xie J (2014) Iron oxide nanoparticle encapsulated diatoms for magnetic delivery of small molecules to tumors. Nanoscale 6(4):2073–2076
Purcell E (1977) Life at low Reynolds numbers. Am J Phys 45:3–11
Darnton NC, Turner L, Rojevsky S, Berg HC (2006) On torque and tumbling in swimming Escherichia coli. J Bacteriol 189:1756–1764
Agarwal R, Ladavac K, Roichman Y, Yu G, Lieber C, Grier D (2005) Manipulation and assembly of nanowires with holographic optical traps. Opt Express 13:8906–8912
Xu F, Shen J, Wang B (2015) Analysis, design, and experiments of a Rough Wall climbing robot based on grabbing claws. In: Su H, Wang T, Tokhi MO, Virk GS (eds) Assistive robotics. World Scientific Publishing, Singapore, pp 191–198
Acknowledgements
We acknowledge Sukirno, Ph.D. for his assistance in teaching Fahrunnida and Puspa Restu Sayekti on the usage of phase contrast microscope in the Laboratory of Parasitology, Faculty of Biology, Universitas Gadjah Mada. We acknowledge Thoriq Teja Samudra, M.Sc. for the assistance in project funding management in Faculty of Biology, Universitas Gadjah Mada.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fahrunnida, Sayekti, P.R., Nuhamunada, M. et al. Self-assembly of cellular micro-bio machine parts. J Micro-Bio Robot 16, 111–121 (2020). https://doi.org/10.1007/s12213-020-00125-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12213-020-00125-4