
Abstract
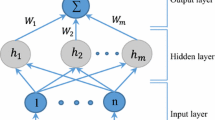
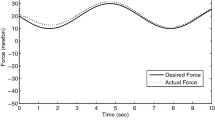
A dynamic velocity feed-forward compensation control (DVFCC) approach with RBF neural network (RBF-NN) dynamic model identification was presented for the adaptive trajectory tracking of industrial robots. The proposed control approach combined the advantages of traditional feedback closed-loop position control and computed torque control based on inverse dynamic model. The feed-forward compensator used a nominal robot dynamics as accurate dynamic model and on-line identification with RBF-NN as uncertain part to improve dynamic modeling accuracy. The proposed compensation was applied as velocity feed-forward by an inverse velocity controller that can convert torque signal into velocity in the standard industrial controller. Then, the need for a torque control interface was avoided in the real-time dynamic control of industrial robot. The simulations and experiments were carried out on a gas cutting manipulator. The results show that the proposed control approach can reduce steady-state error, suppress overshoot and enhance tracking accuracy and efficiency in joint space and Cartesian space, especially under highspeed condition.
Similar content being viewed by others

References
Brogardh T. Present and future robot control development: An industrial perspective [J]. Annual Reviews in Control, 2007, 31(1): 69–79.
Visioli A, Legnani G. On the trajectory tracking control of industrial SCARA robot manipulators [J]. IEEE Transactions on Industrial Electronics, 2002, 49(1): 224–231.
Lub J Y S, Walker M W. On-line computation schemes for mechanical manipulation [J]. ASME Journal of Dynamic Systems, Measurement and Control, 1980, 102(2): 69–76.
Otani K, Kakizaki T, Kogure K. Dynamic parameter identification of an industrial robot and its application to trajectory controls[C]. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Raleigh, USA, 1992.
Ortega R, Spong M W. Adaptive motion control of rigid robots: A tutorial [J]. Automatica, 1989, 25(6): 877–888.
Togai M, Yamano O. Learning control and its optimality: Analysis and its application to controlling industrial robots[C]. In: Proceedings of the IEEE International Conference on Robotics and Automation. San Francisco, USA, 1986.
Jiang Z H, Ishida T. Trajectory tracking control of industrial robot manipulators using a neural network controller[ C]. In: IEEE International Conference Systems on Man and Cybernetics. Montreal, Canada, 2007.
Wang H L, Xie Y C. Adaptive inverse dynamics control of robots with uncertain kinematics and dynamics [J]. Automatica, 2009, 45(9): 2114–2119.
Kim C S, Lee K W. Robust control of robot manipulators using dynamic compensator[C] In: American Control Conference. Baltimore, USA, 2010.
Grotjahn M, Heimann B. Model-based feedforward control in industrial robotics [J]. The International Journal of Robotics Research, 2002, 21(1): 45–60.
Goto S, Usui T, Kyura N. Forcefree control with independent compensation for industrial articulated robot arm [J]. Control Engineering Practice, 2007, 15(6): 627–638.
Verdonck W, Swevers J. Improving the dynamic accuracy of industrial robots by trajectory pre-compensation[C]. In: Proceedings of the IEEE International Conference on Robotics and Automation. Washington DC, USA, 2002.
Wang Gang, Ren Guoli, Yan Xiangan et al. Approach to improvement of robot trajectory accuracy by dynamic compensation [J]. Chinese Journal of Mechanical Engineering, 2004, 17(3): 446–449.
Broomhead D S, Lowe D. Multivariable functional interpolation and adaptive networks [J]. Complex Systems, 1988, 2(1): 321–355.
Feng Gang. A compensating scheme for robot tracking based on neural networks [J]. Robotics and Autonomous System, 1995, 15(3): 199–206.
Paccot F, Andreff N, Martinet P. A review on the dynamic control of parallel kinematic machines: Theory and experiments [J]. The International Journal of Robotics Research, 2009, 28(3): 395–416.
Author information
Authors and Affiliations
Corresponding author
Additional information
Song Weike, born in 1983, male, doctorate student.
Rights and permissions
About this article
Cite this article
Song, W., Xiao, J., Wang, G. et al. Dynamic velocity feed-forward compensation control with RBF-NN system identification for industrial robots. Trans. Tianjin Univ. 19, 118–126 (2013). https://doi.org/10.1007/s12209-013-1870-6
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12209-013-1870-6