
Abstract
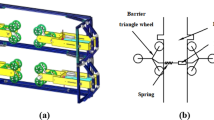
To detect internal steel wire fractures in the cylindrical cable of cable-stayed or suspension bridges automatically in hazardous environments instead of workers, a trilateral clamping-wheeled, rod-climbing robot is designed in this study. In line with this objective, this study also introduces the climbing principle and mechanical structure of this robot (Model-1) and analyzes the static dynamic characteristics of this mechanism. Furthermore, it establishes the mathematical models of the moving wheels during obstacle negotiation. This study also analyzes the relationships of main driving force and resistance with obstacle height to determine the obstacle-negotiation capability of the robot and the two main parameters that influence its obstacle negotiation performance, namely, wheel radius and positive pressure. The Model-1 structure was updated to a new climbing mechanism (Model-2) based on analysis results. Furthermore, the optimal angles of the upper and lower supporting arms were obtained by building the static model of the new mechanism. Finally, Model-2 is superior to Model-1 in terms of obstacle-negotiation capability and satisfies the requirements for suspended cable detection.
Similar content being viewed by others

References
A. B. Mehrabi, M. Asce, C. A. Ligozio, A. T. Ciolko and S. T. Wyatt, Evaluation, rehabilitation planning, and stay-cable replacement design for the hale boggs bridge in luling, Louisiana Journal of Bridge Engineering, 15 (4) (2010) 364–372.
Y. C Yu, K. Yuan and W. Zou, Dynamic model of all-wheeldrive mobile robot climbing over obstacles and analysis on its influential factors (in Chinese), Robot, 30 (1) (2008) 1–6.
K. H. Cho, H. M. Kim and Y. H. Jin, Inspection robot for hanger cable of suspension bridge: Mechanism design and analysis, IEEE-ASME Transactions on Mechatronics, 18 (6) (2013) 1665–1674.
A. Sadeghi, H. Moradi and M. N. Ahmadabadi, Analysis, simulation, and implementation of a human-inspired pole climbing robot, Robotica, 30 (2) (2012) 279–287.
M. J. Spenko, G. C. Haynes and J. A. Saunders, Biologically inspired climbing with a hexapedal robot, Journal of Field Robotics, 25 (4-5) (2008) 223–242.
T. L. Lam and Y. S. Xu, Biologically inspired tree-climbing robot with continuum maneuvering mechanism, Journal of Field Robotics, 29 (6) (2012) 843–860.
S. H. Lee, Design of the out-pipe type pipe climbing robot, Interantional Jouranl of Precision Engineering and Manufacturing, 14 (9) (2013) 1559–1563.
J. C. Fauroux and J. Morillon, Design of a climbing robot for cylindro-conic poles based on rolling self-locking, Industrial Robot: An International Journal, 37 (3) (2010) 287–292.
G. C. Haynes, A. Khripin, G. Lynch and J. Amory, Rapid pole climbing with a quadrupedal robot, IEEE International Conference on Robotics and Automation, Kobe, Japan, May 12-17 (2009) 2767–2772.
H. Shokripour, W. I. W. Ismail and Z. M. Karimi, Development of an automatic self balancing control system for a tree climbing robot, African Journal of Agricultural Research, 5 (21) (2010) 2964–2971.
H. Schempf, E. Mutschler, A. Gavaert, G. Skoptsov and W. Crowley, Visual and nondestructive evaluation inspection of live gas mains using the ExplorerTM family of pipe robots, Journal of Field Robotics, 27 (3) (2010) 217–249.
M. Tavakoli, L. Marques and A. T. Almeida, 3DCLIMBER: Climbing and manipulation over 3D structures, Mechatronics, 21 (1) (2011) 48–62.
M. Tavakoli, L. Marques and A. T. Almeida, Development of an industrial pipeline inspection robot, Industrial Robot: An International Journal, 37 (3) (2010) 309–322.
F. Y. Xu, J. L. Hu, X. S. Wang and G. P. Jiang, Helix cabledetecting robot for cable-stayed bridge: Design and analysis, International Journal of Robotics and Automation, 29 (4) (2014) 406–414.
F. Y. Xu and X. S. Wang, Inspection method of cable-stayed bridge using magnetic flux leakage detection: Principle, sensor design, and signal processing, Journal of Mechanical Science and Technology, 26 (3) (2012) 661–669.
F. Y. Xu, L. Wang, X. S. Wang and G. P. Jiang, Dynamic performance of a cable with an inspection robot - analysis, simulation and experiments, Journal of Mechanical Science and Technology, 27 (5) (2013) 1479–1492.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Kyoungchul Kong
Fengyu Xureceived his M.S. degree from Hefei University of Technology in 2005 and the Ph.D. degree from Southeast University in 2009. He was an associate professor of the Automation Engineering of Nanjing University of Posts and Telecommunications. His current research interests include robotics and dynamics.
Jinlong Hu recieved his M.S. degree from South East University in 2008. He was a senior engineer of Jiangsu Yangli CNC machine Tools Co., Ltd. His current research interests include R&D of CNC machine Tools and Dynamic analysis of structure using finite element analysis technology.
Guoping Jiang received his M.S. degree and the Ph.D. degree from Southeast University, Nanjing, China, in 1994 and 1997, respectively, all in automation school. Dr. Jiang was a professor with the Department of Automation Engineering at Nanjing University of Posts and Telecommunications. His research interests include robotics and Complex network theory and its application.
Rights and permissions
About this article

Cite this article
Xu, F., Hu, J.L. & Jiang, G. The obstacle-negotiation capability of rod-climbing robots and the improved mechanism design. J Mech Sci Technol 29, 2975–2986 (2015). https://doi.org/10.1007/s12206-015-0628-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-015-0628-6