
Abstract
A rapidly converging domain decomposition algorithm is introduced for a time delayed parabolic problem with mixed type boundary conditions exhibiting boundary layers. Firstly, a space-time decomposition of the original problem is considered. Subsequently, an iterative process is proposed, wherein the exchange of information to neighboring subdomains is accomplished through the utilization of piecewise-linear interpolation. It is shown that the algorithm provides uniformly convergent numerical approximations to the solution. Our analysis utilizes some novel auxiliary problems, barrier functions, and a new maximum principle result. More importantly, we showed that only one iteration is needed for small values of the perturbation parameter. Some numerical results supporting the theory and demonstrating the effectiveness of the algorithm are presented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the mathematical modeling of various physical phenomena in bioscience and control theory, delay differential equations arise frequently, for instance, in population dynamics [12], immunology [5], physiology [6], and neural networks [11]. The presence of the delay term in these models is due to feedback control because a finite time is required to sense and react to the data like the immune period, the time between a cell is infected and the new virus is produced, the stages of the life cycle, the duration of the infectious period, etc. [28]. In delay models, the evolution of the solution and its derivatives involve the past history also. Singularly perturbed delay differential equations form a significant category among these equations. When the highest order derivative term is multiplied with a small positive parameter, the delay differential equations are called as singularly perturbed delay differential equations. Some applications include modeling of the human pupil-light reflex [17], variational problems in control theory [8], the study of bistable devices [7], and chemical processes [2]. The following Hutchinson’s equation [3]
is a singularly perturbed differential equation in mathematical ecology, where \(\tau \) represents the time lag and \(\epsilon \) is the perturbation parameter. This equation serves as a fundamental model for the evolution of a population with density u(y, t). The following singularly perturbed partial differential equation is used to model the processing of metal sheets [3]
where u denotes the temperature distribution in the metal sheet with velocity v and heated by a source g. The fixed delay of length \(\tau \) is introduced by the controller’s speed.
Consider the singularly perturbed time delayed parabolic problem

with initial condition
and mixed boundary conditions
where
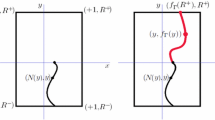
We define  . Suppose \(\gamma =\gamma _\ell \cup \gamma _b\cup \gamma _r\) and \({\overline{\gamma }}=\gamma _\ell \cup \gamma _o\cup \gamma _r,\) where \(\gamma _o=[0,1]\times \{0\}\). Also, assume that \( 0<\epsilon \le 1,\) \(a(y,t)+b(y,t)\ge \beta >0,\) with \(0<\alpha \le a(y,t),~b(y,t)\le 0,\) and \(\tau >0.\) Further, the terminal time T is assumed to be \(T=\sigma \tau ,\) for some integer \(\sigma >1\). We assume that the coefficients of the mixed boundary conditions verify \(\alpha _1>0,~\delta _1\ge 0,~\alpha _1\ge \delta _1,\) and \(\alpha _2,\delta _2\ge 0\) with \(\alpha _2+\delta _2>0\). The data of problem (3)-(4) is supposed to be enough smooth and satisfy appropriate compatibility conditions [31]. With these assumptions, there is a unique solution of (3)-(4) exhibiting boundary layers near \(y=0\) and \(y=1.\)
. Suppose \(\gamma =\gamma _\ell \cup \gamma _b\cup \gamma _r\) and \({\overline{\gamma }}=\gamma _\ell \cup \gamma _o\cup \gamma _r,\) where \(\gamma _o=[0,1]\times \{0\}\). Also, assume that \( 0<\epsilon \le 1,\) \(a(y,t)+b(y,t)\ge \beta >0,\) with \(0<\alpha \le a(y,t),~b(y,t)\le 0,\) and \(\tau >0.\) Further, the terminal time T is assumed to be \(T=\sigma \tau ,\) for some integer \(\sigma >1\). We assume that the coefficients of the mixed boundary conditions verify \(\alpha _1>0,~\delta _1\ge 0,~\alpha _1\ge \delta _1,\) and \(\alpha _2,\delta _2\ge 0\) with \(\alpha _2+\delta _2>0\). The data of problem (3)-(4) is supposed to be enough smooth and satisfy appropriate compatibility conditions [31]. With these assumptions, there is a unique solution of (3)-(4) exhibiting boundary layers near \(y=0\) and \(y=1.\)
It is well known that the classical discretization methods are unable to provide satisfactory results for problems with boundary layers, as they require a large number of mesh points to resolve the boundary layers and leads to a high computational cost. To address this issue, a variety of robust/uniform numerical methods have been considered in the literature, see, e.g. [3, 4, 9, 13, 32] for delay differential equations with Dirichlet boundary conditions and [29, 31] for delay differential equations with Robin boundary conditions. Additionally, some new developments addressing singularly perturbed delay differential equations can be observed in [19,20,21,22,23,24,25].
Domain decomposition-based numerical methods have gained significant popularity for solving partial differential equations. Schwarz’s groundbreaking study on domain decomposition in 1870 [30] is acknowledged as the initial work in this field. Domain decomposition enables the application of distinct treatments to each subdomain, allowing the use of different discretization techniques. This approach enables localized handling of singularities within specific subdomains. Additionally, domain decomposition methods offer the advantage of avoiding non-uniform meshes. Furthermore, these methods can be effectively implemented in parallel to enhance the computational efficiency of numerical computations. Most work on domain decomposition for singularly perturbed partial differential equations is restricted to Dirichlet boundary conditions (see [1, 14, 15, 27, 32] and the references therein). For an in-depth exploration of domain decomposition methods, it is recommended to refer to [26, 33]. The existence of a time delay in the differential model and the inclusion of mixed boundary conditions do, indeed, set the theoretical aspect apart. Consequently, problem (3)-(4) has received less attention in the literature.
As far as we are aware, there is no study on domain decomposition for singularly perturbed partial differential equations with a time delay and mixed boundary conditions. So, the purpose of this paper is two-fold: firstly, to develop a novel domain decomposition method for solving problem (3)-(4), and secondly, to provide a comprehensive error analysis of the developed method. We split the domain into three overlapping subdomains (a regular subdomain and two layer subdomains) with the help of a subdomain parameter. Subsequently, an iterative process is proposed, wherein the exchange of information to neighboring subdomains is accomplished through the utilization of piecewise-linear interpolation. It is shown that the algorithm provides uniformly convergent numerical approximations to the solution. More importantly, we showed that only one iteration is needed for very small values of the perturbation parameter \(\epsilon .\) Numerical results are presented that support the theory and demonstrate the effectiveness of the algorithm. The current research introduces several novel aspects in terms of analysis. Our analysis utilizes some novel auxiliary problems, barrier functions, and a new maximum principle result.
The work is arranged as follows. The continuous maximum principle and the bounds of the derivatives of the solution are discussed in Sect. 2. In Sect. 3 we introduce an algorithm which is analyzed in Sect. 4. Numerical results are presented in Sect. 5 for two test problems and some concluding remarks are included in Sect. 6.
Notation: C is assumed to be a positive constant independent of the discretization parameters \( N_y\), \( \varDelta t \), the iteration parameter k and the perturbation parameter \( \epsilon \). We define a function \( h_{i,n}=h(y_i,t_n) \), for \( h \in C([0,1] \times [0,T]) \). The norm  is defined as discrete maximum norm corresponding to the maximum norm
is defined as discrete maximum norm corresponding to the maximum norm  on a bounded and closed subset
on a bounded and closed subset  of \( [0,1] \times [0,T] \). And for a mesh function Z,
of \( [0,1] \times [0,T] \). And for a mesh function Z,  denotes a piecewise linear interpolation at time \( t_n \).
denotes a piecewise linear interpolation at time \( t_n \).
2 A priori estimates
We obtain some bounds on the derivatives of the solution of (3)-(4). For this purpose, first we introduce a continuous maximum principle for the operator  .
.
Lemma 1
Let  be a sufficiently differentiable function in
be a sufficiently differentiable function in  . Suppose
. Suppose  on (0, T] and
on (0, T] and  on \(\gamma _b\). Then
on \(\gamma _b\). Then  on
on  implies that
implies that  on
on  .
.
Proof
The proof can be obtained using the arguments in [21, 31]. \(\square \)
Lemma 2
Suppose  is a sufficiently differentiable function satisfying
is a sufficiently differentiable function satisfying  on (0, T] and
on (0, T] and  on \(\gamma _b\). Then
on \(\gamma _b\). Then  on
on  implies that
implies that  on
on  .
.
Proof
We assume that
 for
for
 . Therefore, we have
. Therefore, we have
 on
\((0,\tau ]\), and
on
\((0,\tau ]\), and
 on
\(\gamma _b\). Further,
on
\(\gamma _b\). Further,

as \(b\le 0\) and  for
for  . Therefore,
. Therefore,  for
for  by Lemma 1. Repeating the above arguments and using the fact that
by Lemma 1. Repeating the above arguments and using the fact that  for
for  , we can show that
, we can show that  , \(\forall \)
, \(\forall \)  . \(\square \)
. \(\square \)
Using the aforementioned maximum principle, we can readily derive the following stability estimate.
Lemma 3
The solution u of problem (3)-(4) satisfies

Furthermore, the continuous solution u of (3)-(4) satisfies the following estimates.
Lemma 4
Suppose  \(g_\ell ,~g_r\in C^{\frac{3+\mu }{2}}([0,T])\), \(g_b\in C^{(4+\mu ,2+\mu /2)}(\gamma _b)\), \(\mu \in (0,1).\) If the compatibility conditions are satisfied up to the second order, then there exists a unique solution to problem (3)-(4) such that
\(g_\ell ,~g_r\in C^{\frac{3+\mu }{2}}([0,T])\), \(g_b\in C^{(4+\mu ,2+\mu /2)}(\gamma _b)\), \(\mu \in (0,1).\) If the compatibility conditions are satisfied up to the second order, then there exists a unique solution to problem (3)-(4) such that  . Furthermore, it is true that
. Furthermore, it is true that

Proof
The first part is proved by using [16]. Now, by using the transformation \({\tilde{y}}=y/\sqrt{\epsilon }\), we transform problem (3)-(4) as follows

where  . Now, we use the result from [16, p. 352] to obtain
. Now, we use the result from [16, p. 352] to obtain
for all \(\tilde{D}_\delta \) in  . Here, \(0\le s_1+2s_2 \le 4,~s_1,s_2\ge 0,\) and \(\tilde{D}_\delta \) is a \(\delta -\)neighbourhood in
. Here, \(0\le s_1+2s_2 \le 4,~s_1,s_2\ge 0,\) and \(\tilde{D}_\delta \) is a \(\delta -\)neighbourhood in  of diameter \(\delta \).
of diameter \(\delta \).
Transitioning back to the original variable we get

Therefore, the proof is completed using Lemma 3. \(\square \)
A further decomposition of the solution u is required to prove the convergence analysis of the numerical algorithm. The actual solution u is decomposed as \(u=v+w\). The component v is further decomposed as \(v=v_0+\epsilon v_1,\) where \(v_0\) and \(v_1\) are the solutions of the problems

and

Thus, the component v solves

The component w solves

Lemma 5
Suppose  , \(g_\ell ,~g_r\in C^{\frac{5+\mu }{2}}([0,T])\), \(g_b\in C^{(6+\mu ,3+\mu /2)}( \gamma _{b})\), \(\mu \in (0,1),\) and appropriate compatibility conditions hold. Then, one can split u as \(u=v+w,\) where v and w are the regular and singular components, respectively, satisfying
, \(g_\ell ,~g_r\in C^{\frac{5+\mu }{2}}([0,T])\), \(g_b\in C^{(6+\mu ,3+\mu /2)}( \gamma _{b})\), \(\mu \in (0,1),\) and appropriate compatibility conditions hold. Then, one can split u as \(u=v+w,\) where v and w are the regular and singular components, respectively, satisfying


for  , \(~0\le s_1+2s_2 \le 4,~s_1,s_2\ge 0\).
, \(~0\le s_1+2s_2 \le 4,~s_1,s_2\ge 0\).
Proof
The bounds are derived as follows. Note that \(v_0\) is the solution of problem (8), which is a problem that does not involve \(\epsilon .\) Hence, using a classical argument, we get

Moreover, \(v_1\) is the solution to a problem in a form for which Lemma 4 is applicable. Consequently, it holds

Since \(v=v_0+\epsilon v_1\), the necessary bounds for the component v and its derivatives follow from the above two bounds. The bounds for the component w and its derivatives can be proved using the arguments in [10]. \(\square \)
3 The numerical algorithm
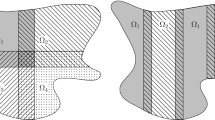
The computational domain  is divided into three overlapping subdomains
is divided into three overlapping subdomains  , \(p=\ell ,m,r,\) where
, \(p=\ell ,m,r,\) where  and
and  are the layer subdomains, and
are the layer subdomains, and  is the regular subdomain with
is the regular subdomain with
Here, \(\rho \) is the subdomain parameter, which is chosen as the Shishkin transition point. Each subdomain  , where
, where  , is discretized using a rectangular mesh which is formed by uniform meshes in both directions. We define
, is discretized using a rectangular mesh which is formed by uniform meshes in both directions. We define  , where \({\overline{\varOmega }}_o=[-\tau ,0]. \) The uniform mesh
, where \({\overline{\varOmega }}_o=[-\tau ,0]. \) The uniform mesh  in the spatial direction is defined as
in the spatial direction is defined as  , while \(\overline{\varOmega }_o^{m_\tau }\), \(\overline{\varOmega }^{M_{t}}\) are the meshes in time direction with uniform length \(\varDelta t=T/M_{t}\), which are obtained by dividing \( [-\tau ,0] \) and [0, T] in a number of subintervals \( m_\tau \) and \( M_{t}=\sigma m_\tau ,\) respectively. Defining
, while \(\overline{\varOmega }_o^{m_\tau }\), \(\overline{\varOmega }^{M_{t}}\) are the meshes in time direction with uniform length \(\varDelta t=T/M_{t}\), which are obtained by dividing \( [-\tau ,0] \) and [0, T] in a number of subintervals \( m_\tau \) and \( M_{t}=\sigma m_\tau ,\) respectively. Defining  and \(\varOmega ^{M_{t}}=\overline{\varOmega }^{M_{t}}\cap (0,T],\) then on each subdomain, the meshes
and \(\varOmega ^{M_{t}}=\overline{\varOmega }^{M_{t}}\cap (0,T],\) then on each subdomain, the meshes  and \( \gamma ^{N_{y},m_\tau }_{b,p}\) are defined as
and \( \gamma ^{N_{y},m_\tau }_{b,p}\) are defined as  and
and  where \(N_{y}\) and \(M_{t}\) are the discretization parameters in space and time directions respectively.
where \(N_{y}\) and \(M_{t}\) are the discretization parameters in space and time directions respectively.
On each subdomain  , the backward Euler scheme and central differencing are employed to discretize in time and space respectively. Thus, we have
, the backward Euler scheme and central differencing are employed to discretize in time and space respectively. Thus, we have

where

The boundary conditions are discretized with a special second order scheme as follows:

Here,

In this approach, we discretized the boundary conditions using a combination of spatial and temporal discretizations. It is important to observe that employing the typical upwind discretization for mixed boundary conditions results in linear accuracy. However, with the proposed methodology, we have the possibility to increase this accuracy to a quadratic order by refining the truncation error in both space and time.
Setting  , the numerical solution of (3)-(4) is computed using the step by step process defined as follows. Suppose the initial approximation
, the numerical solution of (3)-(4) is computed using the step by step process defined as follows. Suppose the initial approximation  is
is

and compute  for \(k\ge 1,\) by solving the following set of equations
for \(k\ge 1,\) by solving the following set of equations



The aforementioned process is repeated until the condition  is not met, where \( \delta \) represents a tolerance specified by the user and the approximate solution
is not met, where \( \delta \) represents a tolerance specified by the user and the approximate solution  of (3)-(4) is defined by
of (3)-(4) is defined by

4 Convergence analysis
To prove the convergence of the proposed method we first introduce the maximum principle for the discrete operators  and
and  for
for  . Suppose the operators \({ G}^{N_{y},M_{t}}_p,~p=\ell ,m,r,\) are defined as \({ G}^{N_{y},M_{t}}_{\ell }{ Z}(0,t_n)=\varGamma _{\ell }^{N_{y},M_{t}}{ Z}(0,t_n)\), \({ G}^{N_{y},M_{t}}_r{ Z}(1,t_n)=\varGamma _r^{N_{y},M_{t}} { Z}(1,t_n)\) and \({ G}^{N_{y},M_{t}}_p{ Z}(a,t_n)={ Z}(a,t_n)\) at the points \( a=\rho , 1-\rho , 2\rho , 1-2\rho \) for \(t_n \in \varOmega ^{M_{t}}\).
. Suppose the operators \({ G}^{N_{y},M_{t}}_p,~p=\ell ,m,r,\) are defined as \({ G}^{N_{y},M_{t}}_{\ell }{ Z}(0,t_n)=\varGamma _{\ell }^{N_{y},M_{t}}{ Z}(0,t_n)\), \({ G}^{N_{y},M_{t}}_r{ Z}(1,t_n)=\varGamma _r^{N_{y},M_{t}} { Z}(1,t_n)\) and \({ G}^{N_{y},M_{t}}_p{ Z}(a,t_n)={ Z}(a,t_n)\) at the points \( a=\rho , 1-\rho , 2\rho , 1-2\rho \) for \(t_n \in \varOmega ^{M_{t}}\).
Lemma 6
Let \({ Z}_p,~p=\ell ,m,r,\) be a mesh function satisfying \({ G}_{p}^{N_{y},M_{t}}{ Z}_p(y_0,t_n)\ge 0,~{ G}_{p}^{N_{y},M_{t}}{ Z}_p(y_{N_y},t_n)\ge 0,\) \(t_n\in \varOmega ^{M_{t}}\) and \({ Z}_p(y_i,t_n)\ge 0\), \((y_i,t_n)\in {\gamma }^{N_{y},m_\tau }_{b,p}\). Then
\(L_p^{N_{y},M_{t}}{ Z}_p(y_i,t_n)\ge 0\),  implies that \({ Z}_p(y_i,t_n)\ge 0\) for
implies that \({ Z}_p(y_i,t_n)\ge 0\) for  .
.
Proof
We prove the result for \(p=\ell \). A similar argument can be used for \(p=m,r\). Suppose the mesh function \({ Z}_\ell \) attains its minimum at \( ({{\overline{y}}}_i,\overline{t_n}) \), that is,

Clearly, \( ({{\overline{y}}}_i,\overline{t_n})\) is not a member of \({\gamma }^{N_{y},M_{t}}_{b,\ell }\). If  , then
, then
since \( { F}_{t}^-{ Z}_\ell ({{\overline{y}}}_i,\overline{t_n})\le 0 \) and \( D_{y} { Z}_\ell ({{\overline{y}}}_i,\overline{t_n})\ge 0, \) which contradicts the assumption.
Now, suppose \( ({{\overline{y}}}_i,\overline{t_n}) \in \gamma _{\ell }^{N_{y},M_{t}} \), then
since \( F_{t}^-{ Z}_\ell ({{\overline{y}}}_i,\overline{t_n})\le 0 \) and \( { F}_{y}^+{ Z}_\ell ({{\overline{y}}}_i,\overline{t_n})\ge 0 \), which contradicts the assumption. Hence, the proof is complete. \(\square \)
Lemma 7
Let \({ Y}_p,~p=\ell ,m,r,\) be a mesh function satisfying \({ G}_{p}^{N_{y},M_{t}}{ Y}_p(y_0,t_n)\ge 0,~{ G}_{p}^{N_{y},M_{t}}{ Y}_p(y_{N_y},t_n)\ge 0,\) \(t_n\in \varOmega ^{M_{t}}\) and \({ Y}_p(y_i,t_n)\ge 0\), \((y_i,t_n)\in {\gamma }^{N_{y},m_\tau }_{b,p}\). Then 
 implies that \({ Y}_p(y_i,t_n)\ge 0\) for
implies that \({ Y}_p(y_i,t_n)\ge 0\) for  .
.
Proof
Define  , \(p=\ell ,m,r,\) \(q_1=0,1\dots ,n,\) where \(\overline{\varOmega }^{m_\tau }_{q_1}\) is defined by splitting \([(q_1-1)\tau ,q_1\tau ]\) into \(m_\tau \) intervals of equal length. Further, we introduce
, \(p=\ell ,m,r,\) \(q_1=0,1\dots ,n,\) where \(\overline{\varOmega }^{m_\tau }_{q_1}\) is defined by splitting \([(q_1-1)\tau ,q_1\tau ]\) into \(m_\tau \) intervals of equal length. Further, we introduce  , where \(\overline{\varOmega }^{m_\tau }_{q_1,q_2}\) is obtained by splitting the interval \([(q_1-1)\tau ,q_2\tau ]\) into \((q_2-q_1+1)m_\tau \) intervals of equal length.
, where \(\overline{\varOmega }^{m_\tau }_{q_1,q_2}\) is obtained by splitting the interval \([(q_1-1)\tau ,q_2\tau ]\) into \((q_2-q_1+1)m_\tau \) intervals of equal length.
Assume that \({ Z}_p(y_i,t_n)={ Y}_p(y_i,t_n)\), for  . Therefore, we have
. Therefore, we have
and

Hence, Lemma 6 implies that \({ Y}_p(y_i,t_n)={ Z}_p(y_i,t_n)\ge 0\), for  . Similarly, for \(q_1\ge 2,\) we can establish \({ Y}_p(y_i,t_n)\ge 0\), for
. Similarly, for \(q_1\ge 2,\) we can establish \({ Y}_p(y_i,t_n)\ge 0\), for  using the fact \({ Y}_p(y_i,t_n)\ge 0\) for
using the fact \({ Y}_p(y_i,t_n)\ge 0\) for  . \(\square \)
. \(\square \)
Next, we define some values that will be used in further analysis.

Further, we define the following auxiliary problems that will be used to prove the convergence of the method.

Lemma 8
Let u be the exact solution of (3)-(4) and  the approximate solution provided by the proposed algorithm. Then, it holds that
the approximate solution provided by the proposed algorithm. Then, it holds that

Proof
For  ,
,

Applying Taylor expansions and using the bounds in (6) with \(h_\ell \le C\sqrt{\epsilon } N_{y}^{-1}\ln N_{y}\) we obtain

Next, for \(t_n \in \varOmega ^{M_{t}} \) we have  and equations (4) and (15) give
and equations (4) and (15) give

Now, using Taylor expansions and the bounds in (6), we get

Further, applying Lemma 7 to the mesh function  , we get
, we get

Similarly,

Now, we consider two cases to find an estimate for  .
.
Case 1: If \( \rho =1/4\), then \(h_m=1/(2N_{y})\) and \(\epsilon ^{-1}\le C\ln ^2 N_{y}\). Now, using (6) and equation (21), from Taylor expansions we get

Case 2: If \(\rho =2\sqrt{\frac{\epsilon }{\alpha }}\ln N_{y}\), then \(h_m \le CN_{y}^{-1}\). So by using Taylor expansion and (6), we get

To get a bound of the term \(\epsilon \left| \left( D_{y}u-u_{yy}\right) (y_i,t_n)\right| \) we use the solution decomposition \( u=v+w\) such that
Now, by using Taylor expansions and the bounds in (11), (12), we get
Thus, for  , we have
, we have

Now, applying Lemma 7 to the mesh function  , we get
, we get

Therefore, by combining the aforementioned bounds, the desired result can be obtained. \(\square \)
In the underlying theorem we have shown that the method converges uniformly for \(\rho =2\sqrt{\frac{\epsilon }{\beta }}\ln N_{y}\).
Theorem 1
The solution of (3)-(4) and the first iterate of the proposed scheme satisfy

Proof
Suppose

is the mesh function, where \(\varPsi _\ell \) is the solution of following problem

where the operator \({\widetilde{\varGamma }}_\ell ^{N_{y},M_{t}}\) is defined as
\( \varphi _1= 2\alpha _1\sqrt{\epsilon }h_\ell -2\delta _1\epsilon (\zeta _1-1)+\delta _1h_\ell ^2a ~,~ \varphi _2=2\alpha _1\sqrt{\epsilon }h_\ell -2\delta _1\epsilon (\zeta _2-1)+\delta _1h_\ell ^2a \) and \(\zeta _1=\beta _1+\beta _2,~\zeta _2=\beta _1-\beta _2 \) with
and  satisfies
satisfies

The solution of problem (23) is
which satisfies  and it is monotonically increasing. Also, we have \(\varPsi ^\pm (y_i,t_n)\ge 0~~\text{ for }~(y_i,t_n)\in {\gamma }^{N_{y},m_\tau }_{b,\ell },~\varGamma _\ell ^{N_{y},M_{t}}\varPsi ^\pm (0,t_n)\ge 0, \varPsi ^\pm (2\rho ,t_n)\ge 0\,\,\,\text{ for }~t_n\in \varOmega ^{M_{t}},\) and
and it is monotonically increasing. Also, we have \(\varPsi ^\pm (y_i,t_n)\ge 0~~\text{ for }~(y_i,t_n)\in {\gamma }^{N_{y},m_\tau }_{b,\ell },~\varGamma _\ell ^{N_{y},M_{t}}\varPsi ^\pm (0,t_n)\ge 0, \varPsi ^\pm (2\rho ,t_n)\ge 0\,\,\,\text{ for }~t_n\in \varOmega ^{M_{t}},\) and  , for
, for  . Thus, by applying Lemma 7 to the mesh function \(\varPsi ^{\pm }(y_i,t_n),\) we get
. Thus, by applying Lemma 7 to the mesh function \(\varPsi ^{\pm }(y_i,t_n),\) we get

Since \( y_i \le \rho \) for  , equation (24) implies that
, equation (24) implies that
Therefore, we have
since \(\lambda >1\) and \(\zeta _2/\zeta _1<1,\) and hence we get \(\left[ \frac{\lambda ^2-\zeta _2^{N_{y}}/\zeta _1^{N_{y}}}{\lambda -\zeta _2^{N_{y}}/\zeta _1^{N_{y}}}\right] \le C\lambda .\) Thus, we have
Further, employing the arguments presented in [18, Lemma 5.1] and utilizing the inequality \(\chi ^{[1]}\le C\), we can establish that \({\varPsi }_{\ell }(y_i,t_n)\le CN_{y}^{-2}\) for  . Thus, it is
. Thus, it is

Proceeding in a similar way we can arrive at

Now, take  , which satisfies the following
, which satisfies the following

Thus, Lemma 7 gives

and hence
Also, we note that \(\chi _{\rho }\le C(\varDelta t + N_{y}^{-2}\ln ^2N_{y})\) using Lemma 8 and  ,
,  . Thus, we get the result by combining (28) and Lemma 8. \(\square \)
. Thus, we get the result by combining (28) and Lemma 8. \(\square \)
In the following theorem, for \(\rho =1/4\), we find a bound on  and then combine it with Lemma 8 to establish a bound on
and then combine it with Lemma 8 to establish a bound on  .
.
Theorem 2
The exact solution of problem (3)-(4) and the approximate solution  defined by (19) satisfy
defined by (19) satisfy

Proof
Let consider the mesh function

where  satisfies
satisfies

For \(t_n \in \varOmega ^{M_{t}}\), we have

i.e. \(\varPhi ^{\pm }(y_i,t_n)\ge 0,~~(y_i,t_n)\in \gamma _{b,\ell }^{N_{y},m_\tau }~ \text{ and }~\varGamma _\ell ^{N_{y},M_{t}}\varPhi ^{\pm }(0,t_n)\ge 0,~ \varPhi ^{\pm }(2\rho ,t_n)\ge 0,~t_n\in \varOmega ^{M_{t}}.\)
For  , it is
, it is

Then, Lemma 7 leads to

Hence, for  , we get
, we get

Similarly, we can show that

Since  and
and  , we have the following
, we have the following

So, applying Lemma 7, we get

Next, we calculate a bound of \(\xi ^{[2]}\) for which we need to estimate \(\chi ^{[2]}\) first. We note that  . Consequently
. Consequently

Therefore, we have \(\chi ^{[2]}\le \chi _{2\rho }+\chi _{\rho }+5\chi ^{[1]}/6.\) Hence, it is
By performing the aforementioned procedure, we have
Simplifying the above expression we obtain
and therefore
Further, Lemma 8 gives \(\varUpsilon \le C(\varDelta t +N_{y}^{-2}\ln ^2N_{y})\), since \((2\rho ,t_n),\)  , and
, and  and
and  . Also, we have \(\chi ^{[1]}\le C.\) Hence, we get the proof by combining (33) and Lemma 8. \(\square \)
. Also, we have \(\chi ^{[1]}\le C.\) Hence, we get the proof by combining (33) and Lemma 8. \(\square \)
5 Numerical results
Here, two test problems are considered to illustrate the numerical scheme discussed earlier. We compute the uniform error and convergence rate as \({\mathbb {E}}^{N_{y},M_t}=\max _{\epsilon }{\mathbb {E}}^{N_{y},M_t}_\epsilon ~ \text{ and }~{\mathbb {R}}^{N_{y},M_t}=\log _2\left( \frac{{\mathbb {E}}^{N_{y},M_t}}{{\mathbb {E}}^{2N_{y},4M_t}}\right) \), taking \(\epsilon \in \{10^{-1},10^{-2},...,10^{-8}\}\) and different values of the discretization parameters \(N_{y}, M_t.\) The formula for computation of errors \({\mathbb {E}}^{N_{y},M_t}_\epsilon \) is given below. The approximate solutions are computed using Algorithm 1. The stopping criterion of the algorithm for the considered problems is  .
.

Algorithm
Example 1
Consider

where \( g_b,~f,~g_\ell \) and \(~g_r\) are determined with the help of the exact solution
\(u(y,t)=t\left[ \frac{e^{-y/\sqrt{\epsilon }}+e^{(y-1)/\sqrt{\epsilon }}}{1+e^{-1/\sqrt{\epsilon }}}-\cos ^2{\pi y}\right] .\)
The maximum pointwise errors for this example are evaluated as  ,
,
where u is the exact solution and  is the approximate solution with the proposed scheme.
is the approximate solution with the proposed scheme.
In Table 1 we present the maximum pointwise errors \({\mathbb {E}}^{N_{y},M_t}_{\epsilon }\), uniform errors \({\mathbb {E}}^{N_{y},M_t}\) and uniform convergence rate \({\mathbb {R}}^{N_{y},M_t}\) for Example 1, which verify the theoretical findings that we have proved earlier in Theorems 1 and 2. The iteration counts mentioned in Table 2 display the number of iteration needed to satisfy the stopping criterion for the algorithm. From Table 2 we can notice that only one iterate is required to stop the iterative procedure for small values of the perturbation parameters, i.e. we can get the desired approximate solution only after one iteration of the algorithm. Further, a comparison between our method and method [31] is given in Table 3. Notably, our method demonstrates lower errors than [31].
Example 2
Consider

where \( g_b,~f,~g_\ell \) and \(~g_r\) are calculated by the following exact solution
\(u(y,t)=(1-e^{-t})\left[ \frac{e^{-y/\sqrt{\epsilon }}+e^{(y-1)/\sqrt{\epsilon }}}{1+e^{-1/\sqrt{\epsilon }}}-\cos ^2{\pi y}\right] .\)

Solution plot for Example 1 with \(\epsilon =10^{-7} \) and \(N_{y}=64,M_{t}=32\)

Solution plot for Example 2 with \(\epsilon =10^{-7} \) and \(N_{y}=64,M_{t}=32\)

Error plot corresponding to Example 1

Error plot corresponding to Example 2
The maximum pointwise errors, uniform errors and uniform rates of convergence are also computed for this example. Table 4 displays the numerical results for Example 2, which agree with the theoretical findings established in Theorems 1 and 2. From this, we can conclude that the rate of convergence of the proposed scheme is almost two. This is evident by the fact that in this case, the space discretization errors dominate the global errors. To indicate the contribution of time discretization errors to global errors the following formula is used
The results are collected in Table 6. From this data, we can observe that the rate of convergence is one. Tables 5 and 7 show how many iterations the iterative procedure requires to reach the required accuracy.
The numerical solutions and corresponding loglog plots for Examples 1 and 2 are represented in Figs. 1, 2 and 3, 4 respectively. From Figs. 1 and 2 we can clearly observe the multiscale character of the solutions near the boundary points and that the slope obtained in the error plots validates the convergence order.
6 Conclusion
We developed a rapidly converging domain decomposition algorithm for solving singularly perturbed time delayed parabolic problems with mixed type boundary conditions. The numerical algorithm is proved to be robust convergent, with an accuracy of order one in time and almost two in space. Also, we observed that the numerical results obtained by the proposed numerical algorithm corresponding to the test problems validate the theoretical findings. The data displayed in Tables 2 and 5 illustrate that a single iteration is adequate to meet the specified threshold for low magnitudes of the perturbation parameter.
Availability of data and materials
Not applicable.
References
Aakansha, Singh, J., Kumar, S.: Additive schemes based domain decomposition algorithm for solving singularly perturbed parabolic reaction-diffusion systems. Comput. Appl. Math. 40, 1–15 (2021)
Adomian, G., Rach, R.: Nonlinear stochastic differential delay equations. J. Math. Anal. Appl. 91(1), 94–101 (1983)
Ansari, A., Bakr, S., Shishkin, G.: A parameter-robust finite difference method for singularly perturbed delay parabolic partial differential equations. J. Comput. Appl. Math. 205(1), 552–566 (2007)
Bashier, E.B.M., Patidar, K.C.: A novel fitted operator finite difference method for a singularly perturbed delay parabolic partial differential equation. Appl. Math. Comput. 217(9), 4728–4739 (2011)
Burić, N., Todorović, D.: Dynamics of delay-differential equations modelling immunology of tumor growth. Chaos Solitons Fractals 13(4), 645–655 (2002)
Chattopadhyay, J., Sarkar, R.R., El Abdllaoui, A.: A delay differential equation model on harmful algal blooms in the presence of toxic substances. Math. Med. Biol. J. IMA 19(2), 137–161 (2002)
Derstine, M., Gibbs, H., Hopf, F., Kaplan, D.: Bifurcation gap in a hybrid optically bistable system. Phys. Rev. A 26(6), 3720 (1982)
Glizer, V.: Asymptotic analysis and solution of a finite-horizon H-\(\infty \) control problem for singularly-perturbed linear systems with small state delay. J. Optim. Theory Appl. 117(2), 295–325 (2003)
Govindarao, L., Mohapatra, J., Das, A.: A fourth-order numerical scheme for singularly perturbed delay parabolic problem arising in population dynamics. J. Appl. Math. Comput. 63(1), 171–195 (2020)
Gracia, J., Lisbona, F.: A uniformly convergent scheme for a system of reaction-diffusion equations. J. Comput. Appl. Math. 206(1), 1–16 (2007)
Han, Q.L.: Robust stability of uncertain delay-differential systems of neutral type. Automatica 38(4), 719–723 (2002)
Kuang, Y.: Delay Differential Equations: With Applications in Population Dynamics. Academic Press (1993)
Kumar, S., Kumar, M.: High order parameter-uniform discretization for singularly perturbed parabolic partial differential equations with time delay. Comput. Math. Appl. 68(10), 1355–1367 (2014)
Kumar, S., Rao, S.C.S.: A robust overlapping Schwarz domain decomposition algorithm for time-dependent singularly perturbed reaction-diffusion problems. J. Comput. Appl. Math. 261, 127–138 (2014)
Kumar, S., Singh, J., Kumar, M.: A robust domain decomposition method for singularly perturbed parabolic reaction-diffusion systems. J. Math. Chem. 57(5), 1557–1578 (2019)
Ladyzhenskaya, O., Solonnikov, V., Ural’tseva, N.: Linear and quasilinear equations of parabolic type, transl. Math. Monographs. Am. Math. Soc. 23 (1968)
Longtin, A., Milton, J.G.: Complex oscillations in the human pupil light reflex with “mixed’’ and delayed feedback. Math. Biosci. 90(1–2), 183–199 (1988)
Miller, J.J.H., O’Riordan, E., Shishkin, G.I.: Fitted Numerical Methods for Singular Perturbation Problems. World Scientific, Singapore (1996)
Mohapatra, J., Priyadarshana, S., Raji Reddy, N.: Uniformly convergent computational method for singularly perturbed time delayed parabolic differential-difference equations. Eng. Comput. 40(3), 694–717 (2023)
Priyadarshana, S.: Monotone hybrid numerical method for singularly perturbed time-lagged semilinear parabolic problems. Natl. Acad. Sci. Lett. 46, 1–4 (2023)
Priyadarshana, S., Mohapatra, J.: An efficient numerical approximation for mixed singularly perturbed parabolic problems involving large time-lag. Indian J. Pure Appl. Math. 1–20 (2023) https://doi.org/10.1007/s13226-023-00445-8
Priyadarshana, S., Mohapatra, J., Govindrao, L.: An efficient uniformly convergent numerical scheme for singularly perturbed semilinear parabolic problems with large delay in time. J. Appl. Math. Comput. 68, 2617–2639 (2022)
Priyadarshana, S., Mohapatra, J., Pattanaik, S.: Parameter uniform optimal order numerical approximations for time-delayed parabolic convection diffusion problems involving two small parameters. Comput. Appl. Math. 41(6), 233 (2022)
Priyadarshana, S., Mohapatra, J., Pattanaik, S.: An improved time accurate numerical estimation for singularly perturbed semilinear parabolic differential equations with small space shifts and a large time lag. Math. Comput. Simul. 214, 183–203 (2023)
Priyadarshana, S., Mohapatra, J., Pattanaik, S.: A second order fractional step hybrid numerical algorithm for time delayed singularly perturbed 2d convection-diffusion problems. Appl. Numer. Math. 189, 107–129 (2023)
Quarteroni, A., Valli, A.: Domain Decomposition Methods for Partial Differential Equations. Oxford University Press (1999)
Rao, S.C.S., Kumar, S.: Robust high order convergence of an overlapping Schwarz method for singularly perturbed semilinear reaction-diffusion problems. J. Comput. Math. 31, 509–521 (2013)
Rihan, F.A., Rahman, D.H.A., Lakshmanan, S., Alkhajeh, A.S.: A time delay model of tumour-immune system interactions: global dynamics, parameter estimation, sensitivity analysis. Appl. Math. Comput. 232, 606–623 (2014)
Saini, S., Das, P., Kumar, S.: Parameter uniform higher order numerical treatment for singularly perturbed Robin type parabolic reaction diffusion multiple scale problems with large delay in time. Appl. Numer. Math. 196, 1–21 (2024)
Schwarz, H.A.: Über einen Grenzübergang durch alternierendes Verfahren. Vierteljahrsschrift der Naturforschenden Gesellschaft in Zürich 15, 272–286 (1870)
Selvi, P.A., Ramanujam, N.: A parameter uniform difference scheme for singularly perturbed parabolic delay differential equation with Robin type boundary condition. Appl. Math. Comput. 296, 101–115 (2017)
Singh, J., Kumar, S., Kumar, M.: A domain decomposition method for solving singularly perturbed parabolic reaction-diffusion problems with time delay. Numer. Methods Partial Differ. Equ. 34(5), 1849–1866 (2018)
Toselli, A., Widlund, O.: Domain Decomposition Methods-Algorithms and Theory, vol. 34. Springer (2004)
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature. Not applicable.
Author information
Authors and Affiliations
Contributions
All the authors have equivalently contributed to the work.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aakansha, Kumar, S. & Ramos, H. A rapidly converging domain decomposition algorithm for a time delayed parabolic problem with mixed type boundary conditions exhibiting boundary layers. J. Appl. Math. Comput. 70, 1043–1067 (2024). https://doi.org/10.1007/s12190-024-01987-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-024-01987-8
Keywords
- Delay differential equations
- Singularly perturbed problems
- Uniformly convergent methods
- Domain decomposition methods
- Parabolic problems