
Abstract
Enthalpy method is commonly used in the simulation of melting and solidification owing to its ease of implementation. It however has a few shortcomings. When it is used to simulate melting/solidification on a coarse grid, the temperature time history of a point close to the interface shows waviness. While simulating melting with natural convection, in order to impose no-slip and impermeability boundary conditions, momentum sink terms are used with some arbitrary constants called mushy zone constants. The values of these are very large and have no physical basis. Further, the chosen values affect the predictions and hence have to be tuned for satisfactory comparison with experimental data. To overcome these deficiencies, a new cell splitting method under the framework of the enthalpy method has been proposed. This method does not produce waviness nor requires mushy zone constants for simulating melting with natural convection. The method is then demonstrated for a simple one-dimensional melting problem and the results are compared with analytical solutions. The method is then demonstrated to work in two-dimensions and comparisons are shown with analytical solutions for problems with planar and curvilinear interfaces. To further benchmark the present method, simulations are performed for melting in a rectangular cavity with natural convection in the liquid melt. The solid–liquid interface obtained is compared satisfactorily with the experimental results available in literature.













Similar content being viewed by others

References
Brent A D, Voller V R and Reid K J 1988 Enthalpy-porosity technique for modelling convection-diffusion phase change: Application to the melting of a pure metal. Numer. Heat Transfer 13(3): 297–318
Cao Y and Faghri A 1990 Numerical analysis of phase-change problems including natural convection. J. Heat Trans. 112(3): 812–816
Cerimele M M, Mansutti D and Pistella F 2002 Numerical modelling of liquid / solid phase transitions analysis of a gallium melting test. Comput. Fluids 31(4–7): 437–451
Crank J 1984 Free and moving boundary problems (Oxford: Oxford University Press)
Date A W 1994 A novel enthalpy formulation for multidimensional solidification and melting of a pure substance. Sadhana 19(5): 833–850
Donea J, Giuliani S and Halleux J P 1982 An arbitrary Lagrangian-Eulerian finite element method for transient dynamic fluid-structure interactions. Comput. Method Appl. M. 33(1–3): 689–723
Gartling D K 1980 Finite element analysis of convective heat transfer problems with change of phase. Computer Methods in Fluids, Morgan K, Taylor C, Brebbia C A (eds), Pentech, London, 257–284
Gua C and Viskanta R 1986 Melting and solidification of a pure metal on a vertical wall. J. Heat Trans. 108(1): 174–181
Kim S and Anghaie S 2001 An effective conduction length model in the enthalpy formulation for the Stefan problem. Int. Commun. Heat Mass 28(6): 733–741
Kumar V, Durst F and Ray S 2006 Modeling moving-boundary problems of solidification and melting adopting an arbitrary Lagrangian-Eulerian approach. Numer. Heat Tr. B- Fund. 49(4): 299–331
Lacroix M 1989 Computation of heat transfer during melting of a pure substance from an isothermal wall. Numer. Heat Tr. B- Fund. 15(2): 191–210
Li C Y, Garimella S V and Simpson J E 2003 Fixed-grid front-tracking algorithm for solidification problems, part I: Method and validation. Numer. Heat Tr. B- Fund. 43(2): 117–141
Mathur S R and Murthy J Y 1997 A pressure-based method for unstructured meshes. Numer. Heat Tr. B- Fund. 31(2): 195–215
Niranjan G N and Iyer K 2011 Modified enthalpy method for the simulation of melting and solidification. Proc. 21 st National and 10 th ISHMT-ASME Heat and Mass Transfer Conf., Chennai, India, December 27–30. Paper number ISHMT_16_017
Okada M 1984 Analysis of heat transfer during melting from a vertical wall. Int. J. Heat Mass Tran. 27(11): 2057–2066
Patankar S V 1980 Numerical Heat Transfer and Fluid Flow (Washington, DC: Taylor and Francis)
Paterson S 1952 Propagation of a boundary of fusion. Glasgow Math. J. 1(1): 42–47
Pilliod Jr J E and Puckett E G 2004 Second-order accurate volume-of-fluid algorithms for tracking material interfaces. J. Comput. Phys. 199(2): 465–502
Price P H and Slack M R 1954 The effect of latent heat on numerical solutions of the heat flow equation. Br. J. Appl. Phys. 5(11): 285–287
Rhie C M and Chow W L 1983 Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 21(11): 1525–1532
Rider W J and Kothe D B 1998 Reconstructing volume tracking. J. Comput. Phys. 141(2): 112–152
Shmueli H, Ziskind G and Letan R 2010 Melting in a vertical cylindrical tube: Numerical investigation and comparison with experiments. Int. J. Heat Mass Trans. 53(19–20): 4082–4091
Tacke K 1985 Discretization of the explicit enthalpy method for planar phase change. Int. J. Numer. Meth. Eng. 21(3): 543–554
Udaykumar H S, Shyy W and Rao M M 1996 ELAFINT: A mixed Eulerian-Lagrangian method for fluid flows with complex and moving boundaries. Int. J. Numer. Meth. Fl. 22(8): 691–712
Voller V and Cross M 1981 Accurate solutions of moving boundary problems using the enthalpy method. Int. J. Heat Mass Tran. 24(3): 545–556
Voller V R, Cross M and Markatos N C 1987 Enthalpy method for convection/diffusion phase change. Int. J. Numer. Meth. Eng. 24(1): 271–284
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
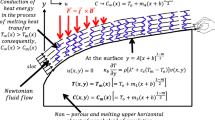
In this section, we prove that the interface constructed is second order accurate. Let Γ(x, y) = 0 denote the equation of the actual interface. Consider the situation shown in figure 14. We assume that in the neighbourhood of x = 0 the curve Γ(x, y) can be written as, y = f(x). Let y = g(x) = mx + c denote the straight line approximation to this curve.

The error analysis for interface construction method.
The error e will be defined as the distance between the points A and B in figure 14. The error is thus
The approximate interface g(x) will be chosen by the present interface construction method such that ratio in which it divides the control volumes ‘P’ and ‘E’ are same as that by f(x).
The above mentioned conditions will hold true only if f(x) and g(x) intersect each other at least once in ‘P’ and ‘E’.
Let x a and x b denote these points of intersection such that 0 < x b < h and − h < x a < 0, where h denotes the dimension of the control volume in the x direction. By Taylor series
At the points x a and x b
Thus,
Multiplying equation (60) by x b and equation (61) by x a and subtracting,
The above equation can be simplified into,
Taking the modulus of the function
Since
Thus from equations (57) and (66)
Appendix B
In this section, the form taken by the present cell splitting method for one-dimension situation is presented. The significant differences between the present scheme and the explicit enthalpy scheme of Tacke (1985) which eliminate waviness are also highlighted. Consider a stencil of control volume as show in figure 15. The solid–liquid interface is assumed to be present in the control volume ‘P’ while control volume ‘E’ is liquid and ‘W’ is solid. The centroids of the liquid and the solid control volumes are denoted by X L and X S, respectively. The liquid fractions at the east and the west face of the control volume are denoted by f e and f w , respectively. For the sake of clarity, the temperatures in the solid and the liquid domain are distinguished by the superscripts ‘S’ and ‘L’, respectively.

The stencil for the control volume discretisation.
The differential form of the energy equation for the liquid domain obtained by suitably substituting for ϕ in equation (11) is
Equation (68) can be discretised for the control volume shown in figure 15 as
where
In the above equations the superscript ‘O’ denotes the values in the previous time steps and Δx P denotes the width of the control volume ‘P’ in figure 15. In the situation shown in figure 15 where the liquid is not present on the east face \(a_E^L =0\). A similar equation can be derived to obtain the temperature in the solid domain.
The enthalpy form of the energy equation (12) is
which can be written in a discrete form of as
where \(a_E^S \) and \(a_W^S \) the coefficients obtained by solving the energy equation in the solid domain. From the enthalpy equation the liquid fraction can be recovered from,
which asserts that the enthalpy of a control volume is composed of its sensible and latent heat parts.
Tacke (1985) had proposed an explicit enthalpy scheme which eliminates waviness in the enthalpy method. The significant difference between the schemes of the present cell splitting method with that of Tacke (1985) are
-
(a)
In the method by Tacke (1985) the diffusive flux on the west face of the control volume for e.g., was discretised as
$$\label{b10} Q_W = -k\frac{T_M - T_W}{X_I - X_W}, $$(77)while in the present method the diffusive flux is discretised as
$$\label{b11} Q_W = -k\frac{T_P^L - T_W}{X_P^L - X_W}. $$(78) -
(b)
In the method by Tacke (1985) the temperature of the solid and liquid domains which are necessary to calculate the sensible heat in the equation (76) are obtained by linear interpolation of the temperatures T M , T E and T M , T W . While in the present method these temperature are obtained by solving the energy equation (69).
Nomenclature
-
A Area of a face of a control volume, m2
-
A I Area of the interface part of a control volume, m2
-
A C Area of the Cartesian part of a control volume, m2
-
a Coefficients appearing in a transport equation
-
b Source term in discretised equation
-
C P Specific heat, J/kg-K
-
C y intercept of the constructed interface, m
-
D Net diffusion into a control volume
-
d Coefficients appearing in a diffusion equation
-
e Error between the actual and the predicted location of the interface
-
f Liquid fraction
-
f (x) Equation of the interface
-
F PX F PY Force due to pressure in x and y direction, N
-
g Acceleration due to gravity, m/s2
-
g(x) Equation of the constructed interface
-
H Enthalpy, J/kg
-
h Width of the control volume in appendix A, m
-
k Thermal conductivity, W/m-K
-
L S A characteristic length scale, m
-
m Slope of the constructed interface
-
N Direction normal to the solid–liquid interface, m
-
\(\hat{n}\) Unit vector normal to a face
-
P Pressure, N/m2
-
P′ Pressure correction, N/m2
-
Q Strength of a line heat source, W/m
-
q D Net diffusion into a control volume
-
r Radial coordinate, m
-
r ∗ Non-dimensional radial coordinate
-
R Radial location of the solid–liquid interface, m
-
R ∗ Radial location of the solid–liquid interface in non-dimensional form
-
S Volumetric source terms in a transport equation
-
S(τ) Non-dimensional position of the solid–liquid interface along the x direction
-
S S Source term due to secondary gradient in transport equation
-
S SP Source term due to secondary gradient in pressure, m/s
-
s(t) Position of the solid–liquid interface along the x direction, m
-
T Temperature, K
-
T ref A reference temperature, K
-
T M Melting point temperature, K
-
T W Temperature at the wall, K
-
t Time, s
-
(u,v ) Velocity coordinates, m/s
-
\(\tilde{u},\tilde{v}\) Tilde velocity used in momentum interpolation, m/s
-
V Volume of a control volume, m3
-
V Velocity vector, m/s
-
V \(_{\textbf{g}}\) Velocity of the grid, m/s
-
X Non-dimensional coordinate along x axis
-
(x,y) Coordinate axis, m
-
(x a ,x b ) x location of the points at which the constructed interface intersects the actual interface
-
ΔH M Latent heat of melting, J/kg
-
ΔV Volume of a control volume, m3
Non-dimensional numbers
-
Pr Prandtl number
-
Ra Rayleigh number
-
St Stefan number
Greek Symbols
-
α Thermal diffusivity, m2/s
-
β Volumetric expansion coefficient, 1/K
-
Γ(x, y) Equation of the interface
-
θ Non-dimensional temperature
-
θ a , θ b Non-dimensional temperatures at the start and end of a wavy cycle respectively
-
λ A constant appearing in equation (55)
-
μ Dynamic viscosity, Pa-s
-
ν Kinematic viscosity, m2/s
-
ξ A coordinate along the line joining the centroids of the control volumes, m
-
ρ Density, kg/m3
-
τ Non-dimensional time
-
τ a , τ b Non-dimensional times at the start and end of a wavy cycle respectively
-
τ* Non-dimensional time at which the interface is at the centroid of the control volume
-
τ** Non-dimensional time when the one dimension melting system reaches pseudo steady state as predicted by classical enthalpy method
-
Φ A generic transport variable
-
Ω The domain
Subscripts
-
E,W,N,S Tags used to address the neighbours of chosen control volume
-
e,w,n,s Tags used to address the faces of chosen control volume
-
f Face
-
I Interface
-
nb Neighbours
-
P A tag used to address a chosen control volume
-
n Normal
-
x,y, ξ Partial derivatives along the corresponding directions
-
S Solid
-
L Liquid
Subscripts
-
S Solid
-
L Liquid
Abbreviations
-
CV Control Volume
-
SL Solid–liquid
Rights and permissions
About this article
Cite this article
GUDIBANDE, N.N., IYER, K.N. Modified enthalpy method for the simulation of melting and solidification. Sadhana 38, 1259–1285 (2013). https://doi.org/10.1007/s12046-013-0210-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12046-013-0210-9