
Abstract
We constructed a discrete-time predator–prey model by adding prey refuge and Allee effects (predator saturation on prey and mate limitation on predator) to an earlier prey–predator model and examined its dynamics. We show the existence of positive fixed points and study the stability properties. The numerical simulations and bifurcation diagrams verify the impact of refuge and the Allee mechanism on the system.












Similar content being viewed by others


References
Celik C and Duman O 2009 Allee effect in a discrete time predator-prey system. Chaos, Solitons Fractals. 40 1956–1962
Courchamp F, Berec L and Gascoigne J 2008 Allee effects in ecology and conservation (Oxford: Oxford University Press)
Elaydi S 2008 Discrete chaos: With applications in science and engineering 2nd edition (Boca Raton: Chapman & Hall/CRC)
Hassell MP 1978 The dynamics of arthropod predator-prey systems (Princeton, NJ: Princeton University Press)
Hassell MP and May RM 1973 Stability in insect host-parasite models. J. Anim. Ecol. 42 693–726
Hassell MP, Lawton JH and Beddington JR 1976 The components of arthropod predation: I. The prey death-rate. J. Anim. Ecol. 45 135–164
Jana D 2013 Chaotic dynamics of a discrete predator-prey system with prey refuge. Appl. Math. Comput. 224 848–865
Ma Z, Li W, Zhao Y, Wang W, Zhang H and Li Z 2009 Effects of prey refuges on a predator–prey model with a class of functional responses: The role of refuges. Math. Biosci. 218 73–79
McNair JN 1986 The effects of refuges on predator-prey interactions—a reconsideration. Theor. Popul. Biol. 29 38–63
Rana S, Bhowmick AR and Bhattacharya S 2014 Impact of prey refuge on a discrete time predator-prey system with Allee effect. Int. J. Bifurcation Chaos 24 1450106
Scheuring I 1999 Allee effect increases the dynamical stability of populations. J. Theor. Biol. 199 407–414
Schreiber SJ 2003 Allee effects, extinctions, and chaotic transients in simple population models. Theor. Popul. Biol. 64 201–209
Taylor RJ 1984 Predation (NY: Chapman and Hall)
Ufuktepe U, Kapcak S and Akman O 2013 Stability and invariant manifold for a predator–prey model with Allee effect. Adv. Differ. Equ. 1 1–8
Wang G, Liang X-G and Wang F-Z 1999 The competitive dynamics of populations subject to an Allee effect. Ecol. Model. 124 183–192
Acknowledgement
This study is supported by The Scientific and Technological Research Council of Turkey (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Additional information
Corresponding editor: N. G. Prasad
Appendix
Appendix
If a non-hyperbolic map is defined on \( {\mathbb{R}}^{2} \), then its dynamics may be analyzed by studying the dynamics on an associated one-dimensional center manifold \( M_{\text{c}} \) (Elaydi 2008). This theorem is applicable only for the fixed point (0,0). Hence, we get the following new system by setting \( x_{t} = N_{t} - 1 \) and \( y_{t} = P_{t} \):
Let \( J^{*} \) be the Jacobian matrix of the system (6). Then
Rewriting system (6), we obtain
where
and
By using the Taylor series expansion of \( e^{ - (\beta /1 + s + sx)} \) at the point \( x = 0 \), we approximate
For simplification, let \( k = e^{ - (\beta /1 + s)} \). Then
Since the invariant manifold is tangent to the corresponding eigenspace by the Invariant Manifold Theorem, assume that the map \( h \) takes the form
To compute \( c_{1} \) and \( c_{2} \), the following functional equation should be solved:
We have
and
This leads to the equation
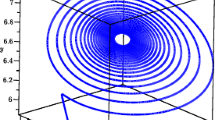
We have \( P^{\prime}(0) = 1 \) and \( P^{\prime \prime } (0) = 2a(1 - d)/m > 0 \) for \( a > 0 \), \( m > 0 \) and \( d \in [0,1) \). Hence, by Theorem 1.5 in Elaydi (2008), (1, 0) is a semistable fixed point if \( \beta /(1 + s) > \ln (r/2) \) (See figure 13).

The map P on the semistable invariant manifold \( x = h(y) \) for \( \beta = 4 \), \( a = 2 \), \( r = 5 \), \( s = 1 \), \( m = 2 \) and \( d = 0.4 \).
Rights and permissions
About this article

Cite this article
Ufuktepe, U., Kulahcioglu, B. & Akman, O. Stability analysis of a prey refuge predator–prey model with Allee effects. J Biosci 44, 85 (2019). https://doi.org/10.1007/s12038-019-9911-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12038-019-9911-5