
Abstract
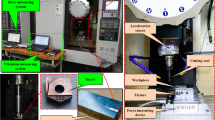
Monolithic mechanism is a potential mechanism for used in precision machining applications. However, it exhibits the limited problems of the resonant frequency and the capacity of load. This paper proposes a design optimization for a new monolithic mechanism. This mechanism is built in a symmetric configuration to generate a translation movement along the vertical axis. Basically, there is a complex relationship among the performances of the mechanism and its geometrical factors. Firstly, a mechanical model of the proposed MM was built, and the numerical data are collected through the finite element simulations. Next, the intelligent surrogate model based on the adaptive-network-based fuzzy inference system with three Genfis types is built to form the fitness function for both the resonant frequency and the force. The modeling results indicated that the Genfis2 and Genfis3 are the best modeler for the resonant frequency and the force, respectively. Lastly, the bonobo optimizer is utilized to maximize the resonant frequency and the force. For case study 1, the results found that the optimal frequency is found about 1013 Hz. For case study 2, the optimal force is found approximately 202.0154 N. Lastly, the errors between the predicted and verified values for two case studies are lower than 4%. The proposed method is a potential optimizer for other monolithic mechanisms and related engineering designs.








Similar content being viewed by others

References
Babbar, A., Jain, V., Gupta, D., Agrawal, D., Prakash, C., Singh, S., et al.: Experimental analysis of wear and multi-shape burr loading during neurosurgical bone grinding. J. Mater. Res. Technol. 12, 15–28 (2021)
Khan, I.A.: Multi-response ergonomic design of human-CNC machine interface. Int. J. Interact. Des. Manuf. 8(1), 13–31 (2014)
Limón-Molina, G.M., González-Ángeles, Á., Nuño-Moreno, V., Luna-Sandoval, G.: Proposes to enable a CNC mill from 3 axes to 5 axes synchronized. Int. J. Interact. Des. Manuf. 12(1), 145–150 (2018)
Le Chau, N., Tran, N.T., Dao, T.-P.: Topology and size optimization for a flexure hinge using an integration of SIMP, deep artificial neural network, and water cycle algorithm. Appl. Soft Comput. 113, 108031 (2021). https://doi.org/10.1016/j.asoc.2021.108031
Le Chau, N., Ho, N.L., Vinh Chung, T.T., Huang, S.C., Dao, T.P.: Computing optimization of a parallel structure-based monolithic gripper for manipulation using weight method-based grey relational analysis. Int. J. Ambient Comput. Intell. 12(3), 39–74 (2021)
Chau, N.L., Ho, N.L., Tran, N.T., Dao, T.-P.: Analytical model and computing optimization of a compliant gripper for the assembly system of mini direct-current motor. Int. J. Ambient Comput. Intell. 12(1), 1–28 (2021)
Pramanik, A., Islam, M.N., Basak, A.K., Dong, Y., Littlefair, G., Prakash, C.: Optimizing dimensional accuracy of titanium alloy features produced by wire electrical discharge machining. Mater. Manuf. Process. 34(10), 1083–1090 (2019). https://doi.org/10.1080/10426914.2019.1628259
Sharma, A., Kumar, V., Babbar, A., Dhawan, V., Kotecha, K., Prakash, C.: Experimental investigation and optimization of electric discharge machining process parameters using grey-fuzzy-based hybrid techniques. Materials (Basel) 14(19), 5820 (2021)
Hao, G.: Determinate synthesis of symmetrical, monolithic tip-tilt-piston flexure stages. J. Mech. Des. Trans. ASME 139(4), 1–9 (2017)
Liang, C., Wang, F., Tian, Y., Zhao, X., Zhang, H.: A novel monolithic piezoelectric actuated flexure-mechanism based wire clamp for microelectronic device packaging, p. 045106 (2015). https://www.springer.com/engineering/electronics/j
Search H, Journals C, Contact A, Iopscience M, Address IP, Rahman AM, et al. Ce Pte Us Pt. pp. 0–68 (2017)
Yongli He RL. Authors : Ac ce d M us pt. 2D Mater., pp. 1–6 (2020). https://doi.org/10.1088/2053-1583/abe778
Hao, G., Li, H., Kavanagh, R.: Design of decoupled, compact, and monolithic spatial translational compliant parallel manipulators based on the position space. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 230(3), 367–378 (2016)
Cai, K., Tian, Y., Wang, F., Zhang, D., Shirinzadeh, B.: Development of a piezo-driven 3-DOF stage with T-shape flexible hinge mechanism. Robot. Comput. Integr. Manuf. 37, 125–138 (2016). https://doi.org/10.1016/j.rcim.2015.07.004
Lee, C.B., Lee, S.K., Tarbutton, J.A.: Positioning control effectiveness of optical knife edge displacement sensor-embedded monolithic precision stage. Sens. Actuators A Phys. 233, 390–396 (2015). https://doi.org/10.1016/j.sna.2015.07.035
Guo, K., Ni, M., Chen, H., Sui, Y.: A monolithic adjusting mechanism for optical element based on modified 6-PSS parallel mechanism. Sens. Actuators A Phys. 251, 1–9 (2016). https://doi.org/10.1016/j.sna.2016.09.035
Ding, B., Li, Y., Xiao, X., Tang, Y., Li, B.: Design and analysis of a 3-DOF planar micromanipulation stage with large rotational displacement for micromanipulation system. Mech. Sci. 8, 117–126 (2017)
Ding, B., Li, X., Li, Y.: FEA-based optimization and experimental verification of a typical flexure-based constant force module. Sens. Actuators A Phys. 332, 113083 (2021). https://doi.org/10.1016/j.sna.2021.113083
Ding, B., Zhao, J., Li, Y.: Design of a spatial constant-force end-effector for polishing/deburring operations. Int. J. Adv. Manuf. Technol. 116, 3507–3515 (2021)
Qin, Y.D., Zhao, X., Shirinzadeh, B., Tian, Y.L., Zhang, D.W.: Closed-form modeling and analysis of an XY flexure-based nano-manipulator. Chin. J. Mech. Eng. Engl. Ed. (2018). https://doi.org/10.1186/s10033-018-0211-z
Xie, Y., Li, Y., Cheung, C.F., Zhu, Z., Chen, X.: Design and analysis of a novel compact XYZ parallel precision positioning stage. Microsyst. Technol. 27(5), 1925–1932 (2021). https://doi.org/10.1007/s00542-020-04968-6
Meng, R., Zhang, W., Zhou, S., Wang, C., Zhao, J., Ge, W.: A micro monolithic integrated force-torque sensor with piezoelectric tuning mechanism. Microsyst. Technol. 26(9), 2879–2886 (2020). https://doi.org/10.1007/s00542-020-04829-2
Naves, M., Nijenhuis, M., Seinhorst, B., Hakvoort, W.B.J., Brouwer, D.M.: T-Flex: a fully flexure-based large range of motion precision hexapod. Precis. Eng. 72, 912–928 (2021). https://doi.org/10.1016/j.precisioneng.2021.08.015
Ghafarian, M., Shirinzadeh, B., Al-Jodah, A., Das, T.K., Wei, W., Tian, Y., et al.: An XYZ micromanipulator for precise positioning applications. J. Micro-Bio Robot. 16(1), 53–63 (2020)
Liu, M., Zhang, X., Fatikow, S.: Design and analysis of a multi-notched flexure hinge for compliant mechanisms. Precis. Eng. (2017). https://doi.org/10.1016/j.precisioneng.2016.12.012
Ling, M., Cao, J., Zeng, M., Lin, J., Inman, D.J.: Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms. Smart Mater. Struct. 25(7), 1–11 (2016). https://doi.org/10.1088/0964-1726/25/7/075022
Noveanu, S., Lobontiu, N., Lazaro, J., Mandru, D.: Substructure compliance matrix model of planar branched flexure-hinge mechanisms: design, testing and characterization of a gripper. Mech. Mach. Theory 91, 1–20 (2015). https://doi.org/10.1016/j.mechmachtheory.2015.04.001
Šalinić, S., Nikolić, A.: A new pseudo-rigid-body model approach for modeling the quasi-static response of planar flexure-hinge mechanisms. Mech. Mach. Theory 124, 150–161 (2018)
Kuresangsai, P., Cole, M.O.T.: Kinematic modeling and design optimization of flexure-jointed planar mechanisms using polynomial bases for flexure curvature. Mech. Mach. Theory 132, 80–97 (2019)
Lum, G.Z., Teo, T.J., Yeo, S.H., Yang, G., Sitti, M.: Structural optimization for flexure-based parallel mechanisms—towards achieving optimal dynamic and stiffness properties. Precis. Eng. 45, 195–207 (2015)
Ghafarian, M., Shirinzadeh, B., Al-Jodah, A., Das, T.K., Pinskier, J.: FEA-based optimization of a complete structure of a monolithic z/tip/tilt micromanipulator. J. Micro-Bio Robot. 16(1), 93–110 (2020)
Lee, C., Lee, J.W., Ryu, S.G., Oh, J.H.: Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis. Robot. Comput. Integr. Manuf. 58, 109–119 (2019). https://doi.org/10.1016/j.rcim.2019.02.005
Ling, M., Howell, L.L., Cao, J., Chen, G.: Kinetostatic and dynamic modeling of flexure-based compliant mechanisms: a survey. Appl. Mech. Rev. 72(3), 1–19 (2020)
Das, A.K., Pratihar, D.K.: Bonobo optimizer (BO): an intelligent heuristic with self-adjusting parameters over continuous spaces and its applications to engineering problems. Appl. Intell. 52, 2942–2874 (2021)
Dinh, V.B., Le, N., Nam, C., Le Thanh, T.P., Dao, P.: Topology—based geometry optimization for a new compliant mechanism using improved adaptive neuro-fuzzy inference system and neural network algorithm. Eng. Comput. (2021). https://doi.org/10.1007/s00366-021-01552-y
Acknowledgements
This research is supported by Industrial University of Ho Chi Minh City (IUH) under Grant Number 01/HD-DHCN.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Nguyen, D.N., Dang, M.P., Huang, SC. et al. Computational optimization of a steel A-36 monolithic mechanism by bonobo algorithm and intelligent model for precision machining application. Int J Interact Des Manuf 17, 2271–2281 (2023). https://doi.org/10.1007/s12008-022-00967-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12008-022-00967-1