
Abstract
Silicon is of great economic importance for the semiconductor industry as well as of academic interest because of its high-pressure phase transformations. These transformations also occur during the indentation of silicon. To further investigate these transformations, a modified method using the continuous stiffness measurement (CSM) during unloading is presented in this work. The use of the CSM signal allows directly calculating the mean contact pressure while unloading. The measurements will be compared to conventional indentation tests and data from high-pressure cell experiments reported in the literature. Furthermore, the influence of constant load holding segments on the phase transformation during unloading is investigated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
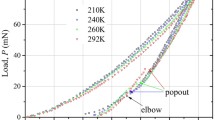
Within the last 30 years and Oliver and Pharr’s groundbreaking publication,1 the field of nanoindentation has been expanding in both methodology and types of investigated materials. Silicon is one material that has been extensively investigated by nanoindentation within this entire period.2,3,4,5,6,7,8,9,10,11,12,13 Much of this research focuses on a phase transformation occurring during the unloading of the indenter. These phase transformations of silicon also occur in other loading scenarios with high local contact pressures like cutting or micromachining.2,14 According to high-pressure cell experiments, the stable, diamond-structure Si-I loses stability above approximately 12 GPa of hydrostatic pressure and transforms to a denser beta-tin structure, referred to as Si-II.15 With this structural change, the character of silicon becomes metallic, as Si-II is plastically deformable, and the electric resistivity drops dramatically upon phase transformation.16 This change in electric behavior has been used to monitor the phase transformation upon loading in the past.3,9,10,17,18 During unloading, silicon cannot transform back to Si-I directly. Instead, depending on the unloading conditions, different metastable phases (Si-III, Si-XII) or amorphous silicon is formed.15,19 Domnich et al.7 have suggested that the transformation to a metastable phase is commonly accompanied by a distinct pop-out event during unloading, whereas the formation of amorphous silicon can be seen as a smooth elbow during unloading. Also, combinations of pop-out and elbow can be found, referred to as mixed type in the following. Raman investigations of residual imprints showed that unloading of the mixed type is associated with the formation of a mixture of metastable-crystalline and amorphous silicon.7 Selected load-displacement curves, acquired during the current study, are exemplarily shown in Fig. 1 to illustrate these different features. There, it can also be seen that the transition from pop-out via mixed to elbow is a fluent one, making distinction into strict categories difficult. In the past, it has been observed that the probability of pop-out occurring increases with increasing temperature5,12,20,21 and decreasing unloading rates.2,7,11,22,23 Also, higher maximum loads lead to more pop-outs.24 In the literature, methods have been proposed to calculate the pressures at which these unloading transformations take place from the load-displacement data. To describe these methods, first, some principles of the Oliver-Pharr method1 need to be addressed.

Overview of the different shapes of load-displacement curves (and corresponding reduced modulus over displacement data in the inset) during indentation. The different behavior is always visible in the unloading segment; (a) pop-out behavior without previous change in slope. (b) Elbow behavior with the drift measurement at maximum load. (c) Elbow behavior interrupted by the drift measurement upon unloading to 5 mN. (d) Comparison of two load-displacement curves showing mixed type behavior; the data in black circles are similar to a perfect elbow; however, it was considered mixed because of the increase in slope towards the end of unloading. The data in red crosses show a pop-out, but the slope starts to decrease before the event; thus, it also was considered to be of mixed type (Color figure online).
In indentation testing the projected contact area and thus the mean contact pressure (hardness) cannot be measured directly. In conventional indentation testing, the contact area is measured after the indentation experiment, using microscopic techniques. In instrumented indentation testing, the formulplajcas established by Oliver and Pharr1 are used to calculate the contact depth and the reduced modulus of the system; see Eqs. 1 and 2, respectively.
Here, hc denotes the contact depth, h is the indenter’s displacement into the surface, hs is the elastic sink-in depth, ε is a geometrical constant dependent on the shape of the indenter (ε = 0.75 for pyramidal indenters and paraboloids of rotation), P is the applied load, and S is the contact stiffness.
In this formula, Er stands for the reduced modulus and A for the contact area. S is again the contact stiffness. If the contact depth as well as the exact shape of the indenter, usually in form of a fitting function (see Eq. 3), is known, the contact area can be calculated. This area function is a mathematical representation of the real shape of the indenter, taking deviations from the ideal geometry into account. The idea of developing such an area function to describe the tip was developed by Pethica et al.25
Cis are the fitting constants, which can be calibrated for each self-similar tip by indenting a reference material with well-known mechanical properties.
As Eq. 1 shows, the formula for the contact depth is dependent on the contact stiffness. In classical instrumented indentation, the contact stiffness and thus the contact area are only determined at maximum applied load as the initial slope of the unloading curve.1 As a way of calculating contact pressure during loading and unloading, Novikov et al.6 suggested that the contact area can be estimated by knowing the sink-in depth at maximum load and estimating a dependence of the elastic sink-in depth proportional to the square root of the applied load. Thus, a measure for the contact depth and therefore the contact area and mean contact pressure can be calculated throughout the entire indentation process. However, to gain actual continuous knowledge of the contact area the contact stiffness needs to be determined continuously.
Modern nanoindentation devices often offer such a function of continuous stiffness measurement (CSM). Here, additionally to the usual loading of the sample, a small harmonic signal is superimposed. From the response of the material to this harmonic load, the contact stiffness can be derived.1,26 One can then use Eq. 1 to calculate a continuous contact depth without needing to assume a certain sink-in behavior. So, contact area and hardness can be calculated during the entire loading sequence. However, as Merle et al.27 elaborated, this is erroneous during unloading, as the actual contact depth is not only reduced by the elastic sink-in but also by the formation of the residual impression. As a workaround, the concept of using the CSM during unloading to define an effective indenter shape described by Merle et al.27 was adapted for this work to measure the contact area and thus the mean contact pressure while unloading.
Methods
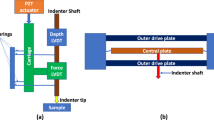
Examined was a piece of an arsenic doped silicon-wafer (0.002 Ωcm, provided by KAI Kompetenzzentrum Automobil- und Industrieelektronik GmbH, Villach, Austria). The experiments were run on a {100} oriented surface with a G200 nanoindentation system (KLA Corp., Milpitas, CA, USA, formerly Keysight) using a diamond Berkovich tip (Synton-MDP, Nidau, Switzerland) and equipped with a CSM unit. In the applied indentation method this CSM signal was activated during both loading and unloading of the sample. With the help of the continuous stiffness data during loading, an average value of the reduced elastic modulus (using Eq. 2) is calculated between 50% and 90% of the maximum displacement into the surface. This reduced modulus value is then set as a fixed value during unloading, and the contact area is calculated by rearranging Eq. 2. Therefore, an unloading hardness, representing the mean contact pressure, can be calculated. The method is schematically summarized in supplementary Figs. S-1 to S-3 (refer to online supplementary material). The assumption of a constant reduced modulus while unloading is justified at least until the onset of the reverse phase transformation, as the phases under the indenter remain the same as during loading in this period. Furthermore, only the volume experiencing the highest stresses is transformed while a larger volume contributes to the elastic response, as the stress distribution in silicon under a Berkovich indenter suggests.28 Additionally, it is assumed in the literature that the pop-in behavior during the loading of silicon with spherical indenters is linked to the primary high-pressure phase transformation.24 For this study, preliminary indentations with spherical indenters and active CSM were performed. In these, no discontinuities in the measured reduced modulus could be identified during pop-in. Likely, the same behavior can be expected of the reverse phase transformation during unloading. According to these two observations, the assumption of a reduced modulus should also hold up during and after the unloading phase transformation.
To see whether the CSM signal influences the phase transformation behavior during unloading, reference indentations were carried out with CSM activated during loading only. All experiments were loaded at a constant indentation strain rate of 0.05 s−1 to a maximum load of 50 mN. The unloading was done with constant load rates. Unloading rates between 0.5 mN/s and 50 mN/s were used to study different transformation behaviors and whether they are affected by the CSM-unload method. For every unloading rate, > 45 indentations with and without CSM-unload were completed each. This large number of indentations was performed to ensure a statistically sound calculation of the probability of occurrence of pop-out, elbow, or mixed transformation. When creating the CSM-unload method a further important change was implemented. The drift measurement sequence was shifted from the last part of the unloading segment to the maximum load holding segment. This change was implemented as indentations that show an elbow behavior undergo a late pop-out if the unloading is interrupted by the constant load hold before the drift measurement in the reference method. Shifting the drift measurement to the maximum load allows an undisturbed recording of the complete unloading curve until the end of contact. The absolute value of the average thermal drift of each set of measurements is < 0.1 nm/s, regardless of whether the drift was measured at maximum load or the end of the unloading.
Changing the unloading rate influences both the rate at which the contact pressure decreases—and therefore the driving force for phase transformation increases—and the rate at which the possible transformation volume increases. Naturally, faster unloading also lowers the available time for phase transformations taking place. Concerning the transformation volume, it has to be considered that the stress distribution under an indentation tip is not homogeneous.28 Therefore, while the tip is retracted the volume of sufficiently low pressure to destabilize Si-II grows gradually. However, if the indenter is held at constant load this volume should remain constant as well. So, to separate the influence of available time from the other effects associated with changing the unloading rate, holding experiments were performed. In these a holding segment of 60 or 120 s was added to the unloading phase at various loads. The unloading rate used when not holding was set to 5 mN/s. Again, > 45 indentations were performed for each set of parameters.
In addition to the nanoindentation experiments, Raman spectroscopy was performed on the residual impressions to verify whether the unloading abnormalities are indeed accompanied by phase changes. These investigations were performed on an alpha300R confocal Raman microscope (WITec wissenschaftliche Instrumente und Technologie GmbH, Ulm, Germany). The laser power was initially set to 5 mW. However, it was quickly reduced to 3 mW as higher powers were observed to promote phase changes during measurement.
Furthermore, scanning electron microscopy (SEM) was performed on the residual impressions. This investigation was performed in a Vega 3 (TESCAN ORSAY HOLDING, a.s.) tungsten filament microscope using an accelerating voltage of 25 kV. Secondary electron and backscattered electron contrasts were used for imaging.
Results and Discussion
Nanoindentation
Mechanical properties were calculated from the continuous hardness and stiffness data between an indenter displacement of 300 nm and 400 nm during loading. The average hardness of the silicon sample is 13 GPa; the average reduced modulus is 160 GPa. Correcting the anisotropy according to Vlassak et al.29 resulted in a representative isotropic elastic modulus of 173 GPa. The anisotropy factor for this correction was calculated from the elastic tensor for silicon given by Hopcroft et al.30 Representative plots of the measured reduced modulus against the displacement into surface are shown in the inset diagrams in Fig. 1.
An evaluation of the probability of occurrence of the different types of unloading abnormalities is shown in Fig. 2. For this diagram, the probabilities were calculated by counting the number of load-displacement curves showing the feature of interest and dividing by the total number of indentations performed with a certain set of parameters. Generally, the trend of decreasing pop-out probability and increasing elbow probability with increasing unloading-rate is in good agreement with results previously reported in the literature2,7,11,22,23. Figure 2 also shows that the general distribution of the unloading abnormalities appears to be mostly unaffected whether the CSM is activated while unloading or not. The CSM signal during unloading only seems to slightly encourage mixed-type transformations. At high unloading rates the lower probability of elbow transformations can also be related to the shift of the drift measurement, as some elbows, affected by the drift measurement, would probably have shown mixed character had they not been interrupted. However, the simultaneous shift to slightly lower pop-out probabilities cannot be explained by the interruption due to the drift measurement. A more significant influence of the CSM signal on the transformation behavior during unloading can be seen when comparing the loads at which the pop-out events occur. When activating the CSM signal during unloading, the arithmetic mean of all pop-out loads observed changed from 14.2 mN to 18.0 mN, whereas the median value rose from 13.2 mN to 17.4 mN. This suggests that the CSM signal encourages the phase transformation to take place more easily. The reason for this change remains unknown as of now.

Development of the probability of occurrence of the different unloading phenomena pictured in Fig. 1. The data plotted in full lines represent the measurements performed without CSM during unloading. The dashed lines show the data collected from the CSM-unload indentations.
Figure 3 exemplarily shows the mean contact pressure vs. the displacement into the surface. The graphs on the left were calculated using the method by Novikov et al.6 The ones on the right were acquired using the new CSM-unload method based on a concept from Merle et al.27 and described in the methodological section. Indentation examples are displayed for each method showing pop-out, mixed, or elbow behavior. To enhance comparability, the same indentation data were used for each method. As Fig. 3 shows, the calculation according to Novikov leads to an increase of contact pressure during the pop-out event. This behavior is inherent to the formula used by Novikov, as the calculation of the pressure is based on the load-displacement data directly. For slow unloading rates, an increase in contact pressure after the pop-out was also observed with the CSM-unloading measurement. However, for measurements with an unloading rate of 5 mN/s or faster, no increase in contact pressure was measured after the pop-out (see Fig. 3). Whether this effect is a measurement artifact or signifies a change in material behavior remains debatable. It has been shown for materials with a high ratio of elastic modulus to hardness (E/H-ratio) that CSM can be compromised by fast loading rates.31,32 At a first glance, the CSM plasticity error described by Merle et al.31,33 does not seem to pose a problem here as no typical plastic deformation is involved in unloading and silicon has a low E/H ratio. However, an argument can be made that much quasi-plastic deformation occurs in the phase transformation in a short time, affecting the CSM non-elastically. Nevertheless, this fast deformation is the same regardless of the unloading rate. Furthermore, Merle et al.33 suggested a CSM phase angle > 10° as an indicator for occurring CSM plasticity errors. This also supports the assumption of unaffected measurements in this work, since the CSM phase angle stays below 6° during unloading even for the fastest unloading rate used (50 mN/s).

Changes in the mean contact pressure in dependence of indenter displacement upon loading as well as unloading. For the diagrams on the left, the contact pressure was calculated according to the assumptions by Novikov et al.6 On the right, the contact pressure was acquired using the CSM signal during both loading and unloading. The data for the diagrams are from three indentations performed at an unloading rate of 5 mN/s with the CSM signal activated during unloading.
The contact pressures at the onset of the unloading phase transformation measured with CSM-unload are plotted in Fig. 4. For mixed transformations, the transformation pressure of the pop-out part was measured and is included in the data for pop-out transformations. As can be seen, the pressure at which a pop-out transformation occurs is more dependent on the unloading rate than the onset pressure of an elbow transformation. At fast unloading rates, the pressure for elbow occurrence approaches a relatively constant value of about 3 GPa, whereas the pressure for pop-out occurrence decreases continuously. Especially at low unloading rates, the pop-out contact pressure decreases steeply with increasing unloading rate. The decrease is roughly linear if plotted over the logarithmic unloading rate, shown in the bottom graph of Fig. 4. However, such dependence cannot extend to very low unloading rates as this would lead to infinite transformation pressures. Accordingly, it has to be assumed that this relation flattens out towards exceptionally slow unloading. The average pop-out transformation pressure measured for the slowest unloading rate was 5.8 GPa, whereas the highest single value was 8.1 GPa. For diamond anvil cells, it has been reported that the transformation of Si-II to Si-III takes place between 10.8 GPa and 8.5 GPa.15 Taking the Si-XII phase into account, the onset of the Si-II to Si-XII transformation was reported at 9.9 GPa.19 The Si-XII to Si-III transformation started at 3.2 GPa, with some Si-XII remaining until ambient pressure.19 Apparently, the transformation can occur in nanoindentation at similar pressures as in diamond anvil cell experiments. However, it is delayed for most experiments until a higher driving force is achieved because of further lowering of the contact pressure. This may be caused by the small transforming volume in nanoindentation at comparably low loads of 50 mN. Juliano et al.24 calculated mean transformation pressures during the unloading. They observed that the mean transformation pressure is dependent on the maximum indentation load (and therefore the transformed volume). They also observed a similar unloading-rate dependence like the one shown in this work. Taking these factors into consideration, a better agreement of the pressure values between indentation and diamond anvil cell experiments can be achieved for slow unloading and a high maximum load during the indentation process.

Contact pressure at which pop-out and elbow transformations occur at different unloading rates. The data are plotted to a linear scale on the top and with a logarithmic x-axis on the bottom graph. The points indicate the arithmetic mean value, and the error bars indicate the highest and lowest value measured for each unloading rate
As established in the methodological section, indentations with a constant-load holding segment during unloading were additionally performed. The displacement changes during the holding segments interrupting the unloading process for 120 s are shown in Fig. 5. Generally, the occurring phase transformations during holding take a variable amount of time to start. A similar time dependence was reported by Wong et al.34 for the phase transformation from Si-I to Si-II. In their study constant load holding segments were applied to the loading of a spherical indenter, creating a similar constant pressure hold as used in the present work. Once the main unloading transformation at constant load starts, it is completed in a burst of only 1 to 3 tenths of a second. For higher holding loads, especially for the 25 mN case, the transformation happens more slowly but still within a second. This resembles the kink pop-out behavior described for pop-outs at high loads during unloading described by Juliano et al.24,35. As these transformations take place under a constant load situation, probably the time it takes for this sudden drop to start is solely determined by the formation of crystal seeds. However, Fig. 5 also shows that the slope of decreasing displacement over time is steeper if the drop has not taken place yet (marked with lines in Fig. 5b). This effect is more pronounced for lower holding loads, pointing towards a dependence on the driving force for phase transformation. The difference between these two modes of decrease of displacement will be evaluated further in the discussion of the Raman measurements. Figure 5a shows that the displacement drops during holding at 10 mN happen within the first 30 s. Furthermore, all samples that had not shown a pop-out before reaching the 10 mN holding force already started developing an elbow-type transformation before being interrupted by the holding segment. Shown in Fig. 5b, some drops take significantly longer at 15 mN holding force. At 20 mN holding force (see Fig. 5c), displacement drops occur right to the end of the holding segment. Likely more drops during holding could be induced if the load is kept constant for longer times. If the force is held constant at 25 mN (see Fig. 5d), only very few displacement drops occur during holding. Across all holding loads, some indentations showed a pop-out during further unloading despite showing no sign of a sudden drop in displacement during the holding segment. This phenomenon occurred with greater probability in the case of high holding loads, as Fig. 6 shows. Thus, a long available time at a constant load promotes the occurrence of additional burst-like transformations in a limited range of holding loads only. If low holding loads are chosen, some form of phase transformation will already take place before holding. Contrarily, if high holding loads are chosen, the transformation will not occur even after prolonged holding, likely because of a lack of driving force. The medium load holding segments also increase the overall probability of obtaining a burst-like transformation. This is especially noticeable for the 15 mN hold for 120 s where > 90% of indentations showed burst-like behavior.

The 120-s-long holding segments during unloading at different constant load levels. Sudden displacement drops taking place during holding appear as almost vertical lines in these diagrams. (a) Holding segments at 10 mN holding force are shown (phase transformation occurs either before the holding segment or relatively quickly during the segment). (b) For 15 mN, the majority of transformations takes place during the holding segment (some transformations take longer times to occur). (c) Holding at 20 mN leads to most transformations taking place after the holding segment (transformations taking place during holding occur right until the end of the holding segment). (d) For 25 mN almost all transformations take place after the holding segment.

Phase transformation occurrence before, after, or during the unloading hold segment in dependence on the holding load as well as duration. The holding load has a significant influence on the phase transformation behavior, where low loads (10 mN) lead to the transformation happening during or before the hold segment and high holding loads (25 mN) lead to the transformation occurring mainly after the hold segment. The holding time has no significant influence at the chosen experimental conditions.
Lastly, the acquired load-displacement curves show that the remaining final indent depth is dependent on the unloading behavior (exemplarily shown in Fig. 1). Pop-outs lead to a larger final indent height hf, whereas mixed type transformations lead to increasingly lower final indent depth with increasing elbow character. The shallowest remaining impressions are recorded for indentations showing exclusively elbow behavior. This is expected to be caused by the metastable-crystalline phases having a higher density than amorphous silicon and in good agreement with previous nanoindentation observations.21
Detailed Impression Characterization Using SEM and Raman Spectroscopy
In the scanning electron microscope, no difference was obvious between the indentations, regarding their unloading behavior. All indents were also checked for cracking, material extrusions, or whether excessive sink-in or pile-up occurred. However, no such abnormalities were identified. The SEM images are displayed in supplementary Figs. S-4 to S-21.
Furthermore, Raman spectroscopy was performed for phase characterization. There, metastable-crystalline phases and amorphous silicon can be clearly distinguished from one another as well as from the surrounding untransformed silicon. Examples of measured Raman spectra are displayed in Fig. 7. The strong Raman peak of bulk silicon at a shift of 520 cm−1 is shown in the topmost diagram in Fig. 7. This peak position is in good agreement with Raman spectra of silicon reported in the literature.36 The second diagram in Fig. 7 shows an example of a metastable-crystalline spectrum. These spectra were generally measured in impressions that showed pop-out transformation behavior during unloading. Variability in the height of the individual peaks was observed, likely dependent on the ratio of Si-III to Si-XII phase generated. The peaks also showed some variation in the observed Raman shift; this is likely caused by differences in residual stress.37 The peaks at ~165 cm−1, ~180 cm−1, ~350 cm−1, ~380 cm−1, ~395 cm−1, ~440 cm−1, and ~480 cm−1 were attributed to these metastable crystalline phases.37,38,39 All indentations showing broad bands (around ~150 cm−1 and ~470 cm−1 in agreement with35) were identified as amorphous silicon (see the bottom diagram in Fig. 7). This amorphous silicon was typically found in indents that showed elbow behavior. In the third diagram of Fig. 7, the gradual transition between purely metastable-crystalline and amorphous silicon is displayed. Such spectra with varying amounts of the two types of materials were found in indents that showed mixed transformation behavior.

Overview of different Raman spectra acquired. The topmost spectrum is that of the undeformed silicon wafer away from any indent. The other spectra show the different phases found within the indentations.
Raman spectroscopy was also carried out on the indents performed with a constant load holding segment. Here, the focus was put on the correlation of the time-dependent behavior with the resulting phase composition. All impressions that showed a sudden displacement drop during holding at 10 mN for 120 s have a fully amorphous Raman spectrum. The indentations that already transformed with a pop-out before the holding segment show a purely crystalline or mixed Raman spectrum. The prominence of the crystalline peaks is hereby correlated to the clarity of the pop-out in the load-displacement data. The same behavior for indentations showing a pop-out before the hold segment was observed at a holding force of 15 mN. Here, indents that transformed during the hold segment generally revealed a mixed Raman spectrum. However, the spectrum changes to a more amorphous configuration if the sudden drop occurs after longer holding times (shown in the upper row in Fig. 8). This indicates that the gradual decrease of displacement at constant loads (depicted in Fig. 5b) can be attributed to an amorphization of the silicon, whereas the sudden drop of displacement can be linked to a metastable-crystalline transformation. Indentations undergoing no burst-like transformation until the end of the holding segment showed mainly amorphous spectra. For the indentations held at 20 mN, the same behavior as in the 15 mN case was observed. Only the crystalline Raman peaks were more intense for all indents that transformed during holding (see Fig. 8), while holding at 25 mN only three indentations showed a sudden drop of displacement. For those three, a highly metastable-crystalline Raman spectrum was observed.

Raman spectra of indentations that showed transformation while being held at constant load at 15 mN (top) and 20 mN (bottom) for 120 s. All spectra are printed to the same intensity scale. In all spectra, a dotted red line indicates the approximate contribution of amorphous material to the spectrum. The metastable crystalline peaks, observable in all spectra, are highlighted with black arrows in the top left spectrum. The spectra on the left show an average of all spectra acquired from indents that showed a sudden drop within the first 40 s of constant load holding. The spectra in the middle are sampled from drops between 40 s to 80 s and the ones on the right between 80 s and 120 s of holding time, respectively. Please note that the indents held at 20 mN were observed at a higher Raman laser power (5 mW instead of 3 mW). This led to slight recrystallization to the stable crystalline phase during the Raman measurement; therefore, a minor peak at 520 cm−1 is observable (marked with a blue, dashed arrow) (Color figure online).
Overall, Raman investigations showed that pop-outs are linked to crystalline transformation and stronger elbow character to an increasingly amorphous transformation, as was expected from the literature.7 New observations were made for the unloading hold experiments. Here, the results of continuous unloading translate to constant load transformations. In that, the amount of amorphous signal being linked to the amount of gradual decrease of displacement at constant load resembles the gradual displacement reduction of a continuous elbow. A sudden drop in displacement at constant load was observed to lead to metastable-crystalline peaks appearing in the Raman spectrum, in analogy to the pop-out in the continuous case. However, this was not observed for the case of holding at 10 mN. It needs to be considered that for this load all indents transforming at constant load had already experienced a starting elbow transformation and strong gradual reduction of displacement upon holding. Also, the release of displacement during the sudden drop is comparably small. Therefore, a small portion of metastable-crystalline material could be present, but undetectable in the Raman spectra.
Conclusion
A new CSM-based method to measure the mean contact pressure during the unloading phase of a nanoindentation experiment has been presented. The method allows basing calculations of the average contact pressure on an actual measurement of the unloading contact stiffness rather than load-displacement data alone. The contact pressure at which the pop-out event in silicon occurs was measured. Clear rate dependence of the transformation pressure could be identified, where faster unloading led to lower transformation pressures. The pressure values acquired with CSM unloading are lower compared to reference data from diamond anvil cell experiments. This may be linked to the aforementioned pressure release rate, the small, probed volume, and the non-hydrostatic stress state under an indenter. By applying Raman spectroscopy, it could be determined that the same dependence between unloading behavior and resultant microstructure exists regardless of whether CSM is active during unloading or not.
Furthermore, experiments with constant-load holding phases were performed to identify whether the unloading phase transformations are more dependent on the change of load or of the time. Here, the gathered data suggest that the load influence is more important even though there is a component to the burst-like transformations that is dependent on time exclusively. It has also been shown that the holding segments have a significant influence on the transformation behavior and can be used to promote more burst-like transformations, especially at a holding force of 15 mN. In analogy to the pop-out during continuous unloading, this sudden drop of displacement at constant load is usually linked to the appearance of metastable-crystalline phases. This crystallinity is more pronounced at higher holding loads. A gradual decrease of displacement at constant load is linked to the formation of amorphous silicon, much like the elbow behavior during continuous unloading. If an elbow transformation already started before the holding segment, usually a sudden drop of displacement occurs during short holding times. This effect also needs to be considered if drift measurements are applied to the unloading curve of silicon. As a solution, it could be shown that a shift of the drift measurements to maximum load can be done when measuring silicon at room temperature.
References
W.C. Oliver, and G.M. Pharr, J. Mater. Res. 7, 1564 (1992).
V. Domnich, and Y. Gogotsi, Rev. Adv. Mater. Sci. 3, 1 (2002).
G.M. Pharr, W.C. Oliver, R.F. Cook, P.D. Kirchner, M.C. Kroll, T.R. Dinger, and D.R. Clarke, J. Mater. Res. 7, 961 (1992).
V. Domnich, Y. Aratyn, W.M. Kriven, and Y. Gogotsi, Rev. Adv. Mater. Sci. 17, 33 (2008).
S. Ruffell, J. E. Bradby, J. S. Williams, D. Munoz-Paniagua, S. Tadayyon, L. L. Coatsworth, and P. R. Norton, Nanotechnology 20 (2009).
N.V. Novikov, S.N. Dub, Y.V. Milman, I.V. Gridneva, and S.I. Chugunova, J. Superhard Mater. 18, 36 (1996).
V. Domnich, Y. Gogotsi, and S. Dub, Appl. Phys. Lett. 76, 2214 (2000).
J.E. Bradby, J.S. Williams, J. Wong-Leung, M.V. Swain, and P. Munroe, J. Mater. Res. 16, 1500 (2001).
A.B. Mann, D. Van Heerden, J.B. Pethica, P. Bowes, and T.P. Weihs, Philos. Mag. A 82, 1921 (2002).
J. E. Bradby, J. S. Williams, and M. V. Swain, Phys. Rev. B 67, 085205 (2003).
J. Il Jang, M. J. Lance, S. Wen, T. Y. Tsui, and G. M. Pharr, Acta Mater. 53, 1759 (2005).
M. M. O. Khayyat, D. G. Hasko, and M. M. Chaudhri, J. Appl. Phys. 101, (2007).
J. il Jang and G. M. Pharr, Acta Mater. 56, 4458 (2008).
B.V. Tanikella, A.H. Somasekhar, A.T. Sowers, R.J. Nemanich, and R.O. Scattergood, Appl. Phys. Lett. 69, 2870 (1996).
J.Z. Hu, L.D. Merkle, C.S. Menoni, and I.L. Spain, Phys. Rev. B 34, 4679 (1986).
S. Minomura, and H.G. Drickamer, J. Phys. Chem. Solids 23, 451 (1962).
I.V. Gridneva, Y.V. Milman, and V.I. Trefilov, Phys. Status Solidi 14, 177 (1972).
D.R. Clarke, M.C. Kroll, P.D. Kirchner, R.F. Cook, and B.J. Hockey, Phys. Rev. Lett. 60, 2156 (1988).
J. Crain, G.J. Ackland, J.R. Maclean, R.O. Piltz, P.D. Hatton, and G.S. Pawley, Phys. Rev. B 50, 13043 (1994).
S. Wang, H. Liu, L. Xu, X. Du, D. Zhao, B. Zhu, M. Yu, and H. Zhao, Sci. Rep. 7, 8682 (2017).
M. S. R. N. Kiran, T. T. Tran, L. A. Smillie, B. Haberl, D. Subianto, J. S. Williams, and J. E. Bradby, J. Appl. Phys. 117, 205901 (2015).
S. Ruffell, J. E. Bradby, and J. S. Williams, Appl. Phys. Lett. 89, 091919 (2006).
S. Ruffell, J. E. Bradby, J. S. Williams, and P. Munroe, J. Appl. Phys. 102, 063521 (2007).
T. Juliano, V. Domnich, and Y. Gogotsi, J. Mater. Res. 19, 3099 (2004).
J.B. Pethica, R. Hutchings, and W.C. Oliver, Philos. Mag. A 48, 593 (1983).
X. Li, and B. Bhushan, Mater. Charact. 48, 11 (2002).
B. Merle, V. Maier, M. Göken, and K. Durst, J. Mater. Res. 27, 214 (2012).
I. Zarudi, L.C. Zhang, W.C.D. Cheong, and T.X. Yu, Acta Mater. 53, 4795 (2005).
J.J. Vlassak, and W.D. Nix, J. Mech. Phys. Solids 42, 1223 (1994).
M.A. Hopcroft, W.D. Nix, and T.W. Kenny, J. Microelectromechanical Syst. 19, 229 (2010).
B. Merle, W.H. Higgins, and G.M. Pharr, J. Mater. Res. 34, 3495 (2019).
B. Merle, W.H. Higgins, and G.M. Pharr, J. Mater. Res. 35, 343 (2020).
B. Merle, V. Maier-Kiener, and G.M. Pharr, Acta Mater. 134, 167 (2017).
S. Wong, B. Haberl, J. S. Williams, and J. E. Bradby, J. Appl. Phys. 118, 245904 (2015).
T. Juliano, Y. Gogotsi, and V. Domnich, J. Mater. Res. 18, 1192 (2003).
J.P. Russell, Appl. Phys. Lett. 6, 223 (1965).
M. Hanfland, and K. Syassen, High Press. Res. 3, 242 (1990).
R.J. Kobliska, S.A. Solin, M. Selders, R.K. Chang, R. Alben, M.F. Thorpe, and D. Weaire, Phys. Rev. Lett. 29, 725 (1972).
A. Kailer, Y.G. Gogotsi, and K.G. Nickel, J. Appl. Phys. 81, 3057 (1997).
Acknowledgements
The financial support by the Austrian Federal Government represented by the Austrian Research Promotion Agency (FFG) within Project No. 884573 is gratefully acknowledged.
Funding
Open access funding provided by Montanuniversität Leoben.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Schaffar, G.J.K., Kappacher, J., Tscharnuter, D. et al. The Phase Transformation of Silicon Assessed by an Unloading Contact Pressure Approach. JOM 74, 2220–2230 (2022). https://doi.org/10.1007/s11837-022-05290-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11837-022-05290-4