
Abstract
Wind energy is an effective and promising renewable energy source to produce electrical energy. Wind energy conversion systems (WECS) have been developing on a wide scale worldwide. The expansion of wind energy demand tends to produce high-quality output power in terms of grid integration. Due to the intermittent nature of wind energy, great challenges are found regarding WECS modeling, control, and grid integration. This paper introduces a comprehensive review of WECS and their grid-interface systems based on soft computing methods. To achieve this aim, more than 300 articles are organised and only 160 papers are presented in this review. This is intended to cover a broad range of topics concerning the configurations of WECS, electrical generators, and various topologies of power converters used for control and grid integration. Furthermore, international grid codes for wind energy integration with electric grids, particularly frequency, power factor, and low voltage ride through (LVRT) capability are investigated. The major controller approaches and topologies for grid and generator converters are discussed. Different aspects of modern control of WECS are introduced either for grid-side or generator-side. Moreover, control strategies for maximum power point tracking methods are compared along with methods of frequency control. This review paper introduces a comprehensive and a useful summery for the recent work in literature regarding WECS. Detailed modelling, control, and grid integration along with comparisons and discussion are introduced.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
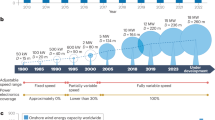
The change from fossil fuels to sustainable energy resources is becoming an international obligation. The main causes for this shift are harmful impacts on the environment, particularly climate and the lack of fossil fuels. Therefore, the renewable energy sources like solar, wind, wave energy are getting a lot of attention from the world [1]. With low demand for all other fuels, the use of renewable energy increased 3% in 2020. While in 2021, the generation of electricity from renewable energy is set to expand more than 8% to 8300 TWh, the fastest annual growth rate since the 1970s [2]. The wind and solar PV energy are expected to generate two-thirds of renewable energy growth. In 2021, China alone produces nearly half of the worldwide growth in renewable energy followed by the USA, European Union and India. The increase rate of renewable electricity generation for the years 2019–2020 and 2020–2021 based on TWh values and year-on-year growth is shown in Fig. 1a. The high efficiency and the relatively low cost of wind power generation are the reasons of why wind energy is the largest compared to other renewable energy resources [3]. The production of electricity from wind energy is rapidly developing among many renewable energy sources as shown in Fig. 1a. The installed wind capacity of the planet reached 175 TWh during 2019–2020, while it increases during 2020–2021 to 275 TWh [2].

a The increase rate of renewable electricity generation based on TWh values and year-on-year growth, b Schematic diagram of a WECS
A wind energy conversion system (WECS) is used to produce electrical energy from wind in a reliable, controlled, and efficient way. Figure 1b shows the layout of a WECS. The main components of a WECS can be generally categorised into electrical, mechanical and control systems. For the electrical components, they consist of electrical generator, possible grid-side and generator-side converters, step-up transformer, harmonic filters and three-phase grid. The mechanical components include the nacelle, etc. The control related components are employed with both the electrical and mechanical energy conversion systems [4]. The classification of WECSs is shown in Fig. 2. With regard to the technology of wind turbines, there are two main types which are offshore and onshore wind generation. Because of the low cost of maintenance and installation of onshore wind farms by comparison with offshore wind farms, onshore generation represents nearly 96% of the total global wind energy [5]. According to the application type, WECS is mainly classified into two categories, standalone and grid-connected WECS. For standalone WECS, it is a substitute option for power consumers in locations where the expansion of the electrical grid is too costly. Because of changing load demand with regard to time and the output power of turbine with the variation of wind speed, standalone WECS is used in integration with other types of power generation [6]. For grid-connected WECS, the connection between the grid and the turbine is carried out at different levels of voltage. The uncontrolled and variation of wind generation is one of the challenges that makes connecting to the grid a difficult task for the operators of system to make the power system balanced and stable. Additionally, the high penetration of wind generation affects various aspects of the power system operation like stability power quality, and economics [7]. According to the rotational speed of wind turbine, WECS is principally classified into two categories, variable speed and fixed speed. Fixed speed systems have led the way owing to their cheap initial costs, simplicity, and high reliability. They were prevalent until around two decades ago, when variable speed systems began to take their place. This is owing to its intrinsic drawbacks, which include inflexibility in supporting grid voltage adjustment, mechanical stress difficulties, low wind energy conversion efficiency, and inevitable power flicker. Moreover, any variation in wind power has an immediate impact on the grid [8]. Variable speed systems are attracting more popularity. They have several advantages, including rapid response under transient power system conditions, increased wind energy conversion efficiency and enhanced power quality. Furthermore, by employing a high-pole number electric machine, the requirement for a gearbox may be removed. Higher losses from the additional devices of power electronic, and also increased cost and the complexity of control, are some of its drawbacks.

The classification of WECSs
The distribution and transmission system operators face several problems as a result of the integration of large-capacity wind power plants into the grid, including electrical power system reliability and stability and power quality. As a result, a number of specific technical requirements known as grid codes have been created and are being updated on a regular basis [9]. The most prevalent grid code requirements are fault ride through (FRT) capabilities, as well as frequency and voltage change limitations, the control of voltage, reactive power, active power and frequency [10]. Owing to the rapid advancement of power electronic technology over the last three decades, power electronics have played an essential role in the integration of large-scale wind systems into the grid. In recent wind power generation plants, power converters are essential in order to provide independent active and reactive power control, variable speed operation and uncomplicated maximum power point tracking (MPPT) operations [11].
The contribution of this paper can be summarized as: (i) An intensive overview about grid-connected WECSs, including a review on electrical generators and power converters, (ii) An insight on different requirements of grid codes and various controllers that are used in wind generation systems, (iii) Recent approaches of LVRT, MPPT and frequency control and (iv) Artificial intelligence (AI) techniques that are used in grid-connected WECSs. This paper is organised as follows: Sect. 2 presents a review of the electrical machines for wind power generation. In Sect. 3, a review of the power converters which are used in wind power generation is introduced. Section 4 describes the different configurations of grid-connected wind systems. Section 5 presented an overview about standard grid codes for wind power integration around the world. Section 6 presents an overall view of the electrical controllers that are used for WECSs. Section 7 presented an overall view of AI techniques that are used in grid-connected WECSs. Finally, the conclusion is presented at the end of this paper.
2 Electrical Generators for WECSs
This section will cover an overview of the electrical machines for wind power generation. Currently, DC generators are often used in low voltage and low power standalone systems therefore, they are limited to very small wind applications. As for the modern trend, it is directed towards AC generators which are the most popular option for large-scale wind applications. So, the major types of electrical machines which are used for wind power generation are induction and synchronous generators as shown in Fig. 3 [12]. One of the negative sides of using induction generators in WECS is that a gear system is required [13, 14]. There are two types of synchronous generators utilised in the WECS: cylindrical pole and salient pole [15, 16]. The elimination of gear system is one of the benefits of synchronous generators over induction generators. The removal of the gear system decreases costs and losses and improves efficiency. It is necessary to increase the number of poles in the rotor to achieve the required turbine speed [17].

The various categories of electrical machines used in a WECS
Squirrel cage induction generator (SCIG) is considered one of the first machines employed in wind energy systems. SCIGs are usually used in fixed/semi variable speed systems. Complicated power factor (PF) improvement control schemes are needed because of the consumption of reactive power from grid by SCIGs to maintain their operation of generation. With regard to the advantages of SCIGs, they are commonly accepted choices for WECS where, they have high reliability, low cost and the operation with no maintenance. However, the major SCIGs drawbacks are large starting current and low starting torque [15, 18,19,20].
Wound rotor induction generators (WRIG) are also among the first machines used in WECS. For WRIGs, external resistance is connected to the windings of rotor via slip rings. By regulating the external resistance, WRIGs have large starting torque and small inrush current. Additionally, PF can be enhanced by WRIGs in comparison to SCIGs. However, the disadvantages related to WRIGs are complexity and the requirement for periodic maintenance for slip rings and brushes. WRIGs are generally used in fixed/semi variable speed systems. Power factor improvement is essential because WRIGs consume reactive power from the grid [15, 21, 22].
Doubly fed induction generators (DFIG) are an extension of the evolution of WRIGs where, they become more widespread in the generation of wind energy. DFIG is a WRIG with a wound rotor with a slip ring and brushes connected to controller, in place of external resistance. For compensating the fluctuations of turbine speed, the rotor input current is adapted in phase angle and frequency. Furthermore, reactive and active power injected to the grid can also be optimized by this adaption of the rotor input current. Therefore, DFIGs are convenient for variable speed wind systems [15, 23, 24]. Brushless doubly fed induction generator (BDFIG) has attracted wind attention because of the avoidance of the problems related with slip rings and brushes. Many versions of BDFIG have been evolved from traditional cascaded generators to self-cascaded generators and to modern DFIGs [25]. Because of the absence of brushes and slip rings, the advantages of BDFIGs are low maintenance and the increasing of reliability, besides the ease of reactive and active power control makes BDFIGs promising prospects in variable speed WECS. The grid is connected to the power windings, whereas the control windings are fed through a controller and converter in back-to-back configuration in order to flow the power in two directions [26]. The research on BDFIGs is still in the preliminary phase. The reason for this is the difficulty of implementing BDFIGs in practice because of power control intricacy [15, 24, 27].
For electrically excited synchronous generator (EESG), DC excitation may be either brushless exciters or an external DC source supplied through slip rings and brushes. In order to fulfil the turbine speed requirement, the number of poles must be raised [17, 28, 29]. In the year 1980, high-temperature superconducting (HTS) material was developed. The field winding for the high-temperature superconducting synchronous generator (HTS-SG) is made of a super conductivity material like Bi-2223 or BSCCO. This material operates at a high temperature (35–40 K). An off-shelf cooling system is used to easily cool this material [17]. The machine armature is designed in such a way that the density of magnetic flux in the stator is maximized, allowing the line voltage to remain constant [17, 30,31,32].
Permanent magnet synchronous generator (PMSG) is the most widely used generator among synchronous generators in WECS. There are two styles of PMSG: inset-mounted and surface-mounted PMSG. For low-speed stand-alone applications, the surface-mounted PMSG is employed. While, the inset mounted PMSG is more suited for high-speed applications [16, 26, 27]. There are some modifications to PMSGs to improve their performance in wind systems where these generators are Vernier, flux-switching, flux-reversal, and magnetic-geared PMSGs.
Vernier PMSG generators are gaining popularity because of their simple mechanical construction and large torque density. The topology of Vernier PMSG is the same structure of a traditional surface-mounted PMSG. For conventional PMSGs, the number of rotor and stator poles is equal, while Vernier PMSGs have a different number for rotor and stator poles. In general, Vernier PMSGs have a fairly small stator poles number and a greatly high rotor poles number to emphasise the effect of Vernier. The torque of Vernier PMSG increases when the rotor speed is less than the rotating field speed. Therefore, they are suitable choice for applications that require high-torque and low-speed such as wind power generation [17, 33,34,35,36,37]. Flux-switching PMSG (FS-PMSG) has permanent magnets on the stator unlike the traditional PMSGs which have permanent magnets on the rotor. Because of the simplicity of construction, the rotor of FS-PMSGs is mechanically durable. In direct-drive WECSs, a high number of poles are necessary to remove gearboxes. Because of the merits of FS-PMSGs such as basically sinusoidal back-EMF, the high density of torque, good thermal management of permanent magnets, and they have gained a lot of attention in the previous few decades [17, 38, 39]. Flux-reversal PMSGs (FR-PMSG) have attracted attention in recent decades due to their benefits; fast transient response, simplicity of rotor configuration, and high-power density, Moreover the mechanical robustness of FR-PMSG rotor. Each stator tooth has a pair of permanent magnets with alternating polarities placed on the inside surface. In addition, the windings are commonly coiled around the teeth of stator, causing short-end windings. Back-EMF waveforms in the tooth windings are generated by bipolar flux [17, 40]. The concept of magnetic-geared PMSGs (MG-PMSG) is magnetic gear. The mechanism of operation is based on magnetic field modulation generated by two permanent magnet rotors by using ferromagnetic pole pieces [17]. The permanent magnets on the rotor and the armature windings in the stator are designed to have various pole numbers, resulting in varying speeds. The rotating ferromagnetic pole pieces act as a flux modulator, ensuring that the stator and rotor magnetic fields have the same speed and pole number. As a result, steady torque is produced, similar to what a reduction gear does, resulting in low speed and high torque which is suitable in WECSs [17, 41, 42].
Table 1 summarises the major differences between common electrical generators that are used in WECSs. According to surveys, the industry uses DFIGs by approximately 48.6%, SCIGs by 48.1%, PMSGs by 3.2%, and the remaining machine types are around 0.1% [15]. Therefore, induction generators dominate the wind market with a large percentage of about 97%. The most widely used of the induction machines is BDFIG thanks to the avoidance of brushes, slip rings, and losses in rotor windings. The induction machines are not suitable for gearless drives due to the losses of excitation in these large machines as a result of the large air gap. The possibility of removing the gear system in the wind generator is one advantage of using the synchronous generator. The main problems of using PMSGs are the inability to regulate their excitation and the high cost of magnets. Nowadays, the cost of permanent magnets is falling substantially.
2.1 Recent Trend in Wind Generators
This subsection introduces the overall view of the recent research on the enhancement of the performance of wind generators. In [43], Liu et al. introduced a unique bearing current reduction technique by using the electrostatic shield on the DFIGs rotor side to mitigate the ratio of bearing voltage in the generator. This research proved that the bearing currents can be efficiently reduced by the novel suppression approach. Under the unsegmented state, the suppression effect is better, but the eddy current loss is greater. In [44], Mishra et al. presented a novel six-phase DFIG with asymmetrical winding structure to capture electric power from WECS. The attractive benefits of the proposed novel machine above the conventional induction machines are high reliability and efficiency, reduced per leg converter rating, low pulsating torque and per phase current, and the possibility of using for feeding 6-phase and 3-phase transmission line. In [45], Sourabh and Parida presented a novel design of BDFIG that considers a U-shaped rotor and dual-stator structure. The major advantages of this type of design are high power density and torque with low torque ripple, wide range of speed and torque in stable region, operating at synchronous speed like synchronous machines. In [46], Zhang et al. introduced a novel interior permanent magnet BDFIG for wind power applications, that is based on the magnetic field modulation theory. The merits of this design are high torque density and power density, and high permanent magnet utilisation. In [47], Zhang et al. presented a novel BDFIG with the hybrid rotor that is used in large-scale offshore wind power generation with number of distinct benefits. In [48], Zhang et al. presented BDFIG with novel hybrid rotor with a new technique based on the magnetic field modulation theory for the best selection of slot combination.
In [49], Cheng et al. introduced a novel 10 MW HTS synchronous machine with extra permanent magnets installed between the pole-tips of silent rotor for offshore wind energy applications. This study concluded that the proposed generator offers advantages in terms of torque density increase and mass reduction, as well as general short-circuit fault performance in comparison to traditional machines. In [50], Dong et al. presented a novel radial partitioned stator HTS-excitation flux-switching machine. The key is that the single ring-shaped HTS-excitation coil is independently placed in the coaxial claw-pole outer stator. While the armature windings are wound around the U-shaped iron core on the inner flux-switching armature stator without permanent magnets. In [31], Zhou et al. introduced a 2 MW direct drive HTS wind generator by using HTS wires in copper transposed conductor in the stator windings and the rotor field coils. In [32], Xue et al. discussed the performance of machines with HTS armature windings which are more sensitive to the parameters of design owing to the interaction between the flux density and the operating current compared with the conventional electrical machines.
In [51], Kumar et al. introduced the characteristics and design for a novel PMSG for the application of wind power. The rotor of the proposed generator features is a V-shaped embedded magnetic pole and the stator includes six-phase windings. The conclusion of this paper was higher reliability and power density of the proposed generator as compared to the conventional generators. In [52], Yang et al. introduced a novel asymmetric-magnetic-pole interior PMSG by combining the permanent magnet structures of flat-type and dual-layer reluctance rotor. The major merits of this proposed machine are greater high efficiency region because of the improvement of torque, and higher power and torque in the low-speed region. In [53], Xiao et al. proposed a novel topology of spoke-type asymmetric interior PMSG featured by asymmetric flux barrier with 12 slots, 8 poles, and no overlapping stator windings. In [54], Jiang et al. presented a novel doubly-fed doubly-salient machine with DC saturation-relieving effect which can capture more wind power and extend speed range. The proposed machine is suitable for low and high wind power applications. In [55], Zeinali and Keysan introduced a novel electrically excited claw pole Vernier generator for wind turbines. This novel topology has the potential to decrease the bulk and cost of generator, as well as making manufacture and handling easier. In [56], Allahyari and Torkaman presented a novel construction of consequent pole dual rotor Vernier PMSG. Windings are put on the dual-sided stator slots, and magnets are positioned on the inner and outer rotor slots in this structure. In [57], Jia et al. introduced a novel stator and rotor dual permanent magnet Vernier machine with multiple magnetic sources. Genetic algorithm and finite element method were employed to optimize the number of slots and poles where the optimal numbers are 12 slots and 10 poles. In [58], Siddiqi et al. introduced a novel topology of dual air gap radial flux Vernier PMSG with. The proposed machine consists of two stators and a sandwiched yokeless rotor that aids in the reduction of magnet volume by allowing for effective flux coupling in the stator windings. In [59], Chen et al. introduced a novel FS-PMSG with dual sets of magnet arrangements. Compared with the conventional multi-tooth FSPM machine, it is demonstrated that the proposed topology can achieve 79.4% lower cogging torque, 30.8% higher torque density, and 15.6% higher power factor than the traditional machine. In [60], Jiang et al. presented a novel 24/17-pole 3-phase stator wound field FS-PMSG with the combination of asymmetric stator poles and overlapping armature winding for higher torque density. In [61], Yang et al. proposed a novel FR-PMSG with asymmetric stator pole configuration. Unlike traditional FRPM machines, which have regular “NS-NS-NS” permanent magnet sequence, the proposed machine has “NSN-S-NSN” permanent magnet configuration. In [62], Zhou et al. presented a novel field-modulated MG-PMSG. The key design feature of the proposed machine was the use of an inner rotor configuration and a stator core with fixed modulator parts to increase fabrication feasibility and rotation dependability.
3 Power Electronic Converters for WECSs
The connecting of wind turbine to the grid is a vital aspect of the wind-based power system. There are two options for dealing with this issue, one is to employ an appropriate energy storage system, which is difficult to implement owing to the high cost and large space. Another option is the usage of power electronic converters majorly on the grid side with a suitable control mechanism. For variable speed WECSs, by employing the power converter on the generator side, the extraction of maximum power from the wind is possible while keeping the system stable. In addition, by employing the power converter on the grid side, the wind turbine can control the exchange of reactive power and enable it to participate in the regulation of voltage. The power converters must meet certain requirements like limited weight and physical size, reliability, low power losses, and minimum maintenance to be utilized in the WECSs. Many topologies of power converters which take into account these properties have been presented by researchers of WECSs. As illustrated in Fig. 4, the converter topologies are divided into three categories [4, 63, 64].

Power electronic converters classification for WECSs
3.1 Back-to-Back Power Converters
Back-to-back power converters are two similar converters which are connected back-to-back at the DC link through inductors or capacitors. They convert the variable frequency and voltage of the generator to DC voltage and then to AC with a constant voltage and frequency at the grid side. Back-to-back converters provide a four-quadrant operation for wind generators. Figure 4 shows the various back-to-back power converters that can be utilized in variable-speed WECSs. They are generally divided into low voltage and medium voltage converters [4, 63, 64]. Two-level back-to-back converter is commonly used in WECSs. The generator-side converter is realized by two-level rectifier while, the two-level inverter is employed on grid side as illustrated in Fig. 4a. To obtain voltage and capacitance levels, the DC link is accomplished using a parallel/series string of electrolytic capacitors. Furthermore, the DC link allows for decoupling between the grid and generator. As a result, the generator transients do not appear on the grid side. To increase the power ratings, more three-phase two-level converter modules are connected in parallel with common DC-link element for all converters to decrease space and cost. This configuration provides redundancy and energy efficiency. A mismatch in the parameters of grid-side filter and converter causes circulating currents in both grid-side and generator-side converters. This problem must be considered in the controller design. To solve the reliability and circulating currents issues, the individual DC-link element in each converter module is employed in order not to lose the best qualities like modularity, power handling capability, efficiency, and redundancy. But, the cost of system increases due to the individual DC link [4, 63, 64]. The increasing of power level in wind turbines is driving the technology of power electronics toward medium voltage operation. The medium voltage power converters will dominate the future generation of wind turbines due to their cost-effective, compact, and reliable design. The two-level back-to-back converter shown in Fig. 5a can also be used for medium voltage applications by connecting switching devices in series. To provide same voltages among the series switches, an appropriate voltage equalization method must be developed. Three-level back-to-back neutral-point clamped converter is an alternative solution for medium voltage operation as shown in Fig. 5b. Neutral-point clamped converters lead to low output current ripple, reduced switching losses, and small harmonic filter than two-level back-to-back converters. The voltages across the capacitors should be balanced in order not to damage the semiconductor switches due to high stress on switches [65]. The multilevel converters are promise for future wind turbines because of their technical advantages and suitability for medium voltage operation. The traditional multilevel converter topologies like cascaded H-bridge converter, flying capacitor converter, and hybrid converter provide high power density which are needed for the wind turbine manufacturers due to the limited space in nacelle. Therefore, development activities and research in the medium voltage power converters area must become more rigorous in the next years [9, 63, 64].

a WECS with two-level back-to-back converter, b WECS with three-level back to-back neutral-point clamped converter, c WECS with passive generator-side converter
3.2 Passive Generator-Side Power Converters
WECS has a unidirectional power flow from the generator to the grid. Therefore, diode-bridge rectifiers can be used instead of pulse width modulated active converters to convert AC to DC on the generator side. Diode-bridge rectifiers are less costly and more reliability than pulse width modulated converters. Diode-bridge rectifiers are suitable on the generator side for WECSs which uses EESG and PMSG because of generating the rotor flux by rotor field excitation and permanent magnets, respectively. But they are not suitable for WECSs that use induction generators like SCIG and DFIG because they require magnetizing current during their operation. DC-DC converter is used to enable MPPT operation in WECSs which employing a diode-bridge rectifier. Therefore, there are three power converters, AC/DC then DC/DC then DC/AC as shown in Fig. 5c [9, 63,64,65].
3.3 Power Converters Without an Intermediate DC Link
The variable frequency and voltage on the generator side can be transformed to fixed frequency and voltage on the grid side without the need of any DC-link elements which have short life time and are bulky. Matrix converters convert direct AC/AC power through single stage, resulting in high efficiency power conversion with compact size. Additionally, matrix converters provide reliable option for wind turbines, especially when employing in offshore. They can be used with both synchronous and induction wind generators because they enable the four-quadrant operation similar to back-to-back power converters. Direct AC-AC conversion is also performed by cycloconverters where, their output voltage and frequency are only a portion of the input voltage and frequency. They can produce a narrow range of output voltages and frequencies compared with matrix converters [9, 63,64,65].
4 Grid-Connected Wind Systems
This section will cover an overview of grid-connected wind system configurations. The power electronic converters and electrical generators employed determine the method through which a wind turbine is linked to the grid. The turbine configurations may be classified into a few topologies based on the use of power converters in the WECS: directly connected to the grid without any need for power converters, connection to the grid through a full-scale converter, and connection to the grid through a partial-scale converter. For full-scale converter, the converter rating is equal to generator rating where, whole power exchanged from the generator to grid must be passed via the converter. For partial-scale converter, the converter rating is a proportion of the generator rating where, a part of power exchanged from the generator to grid must be passed via the converter [4, 66]. A broad range of WECS configurations may be produced by combining electrical generator and power converter in various designs and combinations. According to surveys, over the past three decades, there are five common configurations as depicted in Fig. 5. Table 2 summarises the five different types of WECS configurations according to generator used, the utilization of power converters, power converter ratings, possible speed range, gearbox requirement, soft-starter need, external reactive power compensation requirement, the ability of MPPT, FRT compliance, advantages and disadvantages. In general, type 3 and type 4 WECS configurations are the best suitable for megawatt scale applications. But, using fully rated power converter for type 4 is the particular disadvantage of this configuration. Therefore, type 3 configuration is considered the best system compared to other systems.
4.1 Type 1 WECS Configuration
Type 1 WECS is the original and earliest wind turbine technology. For this type, SCIG is connected to the grid via a step-up transformer and soft starter without the use of power converter as illustrated in Fig. 6a. The soft starter is bypassed by a switch after the start-up operation and the system continues its operation without the use of any power converter. Three-phase capacitor banks are commonly used to improve PF. This configuration is distinguished by its reliability, low initial costs and simplicity. The main drawbacks of this Type configuration are the direct effect of wind speed fluctuations on the grid, low efficiency of wind energy conversion and the stress on the mechanical wind turbine components during the grid faults. Additionally, this type of WECS has a fixed speed. For compliance with grid standards, fixed-speed WECSs are equipped with extra hardware, like STATCOM. Fixed-speed WECSs were common until a decade ago, and due to its inherent drawbacks, this technology is progressively becoming obsolete [4, 8, 10].

WECS configurations a Type 1, b Type 2, c Type 3, d Type 4, e Type 5
4.2 Type 2 WECS Configuration
Type 2 WECS configuration employs WRIG with variable resistance, which is adjusted by a power converter that is partially rated (10%) as shown in Fig. 6b. This type also necessitates the use of a soft starter, gearbox, and reactive power adjustment. The speed and torque characteristics of generator are affected by the rotor resistance variation, allowing the turbine to run at different speeds. Typically, the speed variation range is restricted to roughly 10% of the rated speed. Therefore, it is a semi-variable-speed WECS configuration. The variable-speed operation decreases mechanical stress, improves the energy conversion efficiency, reduces the requirements of maintenance, and decreases the tear and wear of bearings and gearbox therefore extending the life cycle. But the major problem is high energy losses in the resistance of rotor. Due to its restricted speed range and high losses, this type is becoming less popular among the manufacturers of wind turbines [4, 8, 10].
4.3 Type 3 WECS Configuration
The generator power is supplied to the grid via the rotor and stator windings in type 3 WECS configuration as shown in Fig. 6c. It employs DFIG or BDFIG with a partially rated power converter that is used in the rotor circuit to process the slip power, which is about 30% of the generator rated power. Power converter provides bidirectional power flow in the rotor circuit and extends the generator speed range to about 30%. Therefore, it is a semi-variable-speed WECS configuration. This configuration employs the gearbox in the same way as type 1 and type 2 WECSs, but there is no requirement for a reactive power adjustment or soft starting. In comparison to type 1 and type 2, this system increases the efficiency of power conversion by using MPPT, resilience against power system disruptions and improves dynamic performance. The disadvantages are the high cost due to power converters and the regular maintenance due to gear system [4, 8, 10].
4.4 Type 4 WECS Configuration
The generator power is supplied to the grid via full-scale power converter that is 100% of the rated power of generator for type 4 WECS configuration as shown in Fig. 6d. The employment of full-scale power converters can significantly improve the WECS performance. This type uses SCIG, PMSG or EESG with power rating of up to several megawatts. Because power converter should be rated at the same level as the capacity of generator, the cost, size and complexity of system increase. Although the cost of a power converter is significant, it only accounts for about 7–12% of the total cost of a wind turbine. Furthermore, power converter losses are greater, resulting in poorer efficiency. The generator, on the other hand, is totally disconnected from the grid and can run at full speed range from 0 to 100% with the use of full-scale power converter. In addition, the power converters allow the system to compensate reactive power and to connect with grid smoothly. The merits of this configuration in comparison to other types of WECSs are highest overall wind energy conversion efficiency, more robust against the faults of power system, the necessity for gearbox can be removed by employing synchronous generator with high pole number, and the accomplishment of the best FRT compliance without the use of any additional hardware. Although SCIG and EESG may be utilized in this type, PMSG is the best choice since it removes the requirement for brushes and slip rings, resulting in a more uncomplicated design [4, 8, 10, 67].
4.5 Type 5 WECS Configuration
Type 5 WECS configuration uses EESG which its power is supplied directly to the grid by using torque/speed converter as illustrated in Fig. 6e. The mechanical converter, instead of the electrical converter, is used to provide variable speed operation in wind turbines, which is an old conception. The torque/speed converter, commonly known as variable ratio transmission. It transforms variable wind turbine speed to fixed speed. The generator runs at a constant speed and is linked to the grid directly through synchronizing circuit breaker point without using any step-up transformer or power electronic converter. The total system cost and area are reduced compared to other types because no power electronic converter is required. Despite its benefits, this configuration is rarely employed in WECSs because of the limited knowledge and the problems associated with mechanical converters [10].
5 Grid Codes
Compliance with grid codes is vital because it is necessary to keep the power system running smoothly and safely. The fundamental mains code rules govern the behaviour of wind turbines in the case of voltage, frequency, and mains failures. The operators of transmission system face several challenges as a result of the integration of large capacity WECS into electrical grids like the reliability and stability of electrical system and power quality. As a result, a number of precise technical criteria known as grid codes which have been updated on a regular basis. The principal keys for grid codes are reactive power control to adjust the voltage of grid, active power control to regulate the frequency of grid, grid power quality, harmonic oscillations, system protection, and the capability of FRT. The comparison between the requirements of group of countries around the world to integrate wind energy into their national grids is shown in Table 3. The major requirements of grid code are outlined in the following subsections as follows [15, 68]:
5.1 Frequency Requirements
Most grid codes necessitate that wind turbines operate continuously within a small frequency range, with disconnection permitted only when the frequency falls below the minimum or exceeds the limit of maximum frequency. The power system must meet various frequency range requirements and assess the state of each wind turbine. The control of active power enables the wind turbine to control the generation of real power as demanded by transmission system operators either by frequency control (primary control) or power curtailment (secondary control). According to the deviations of frequency, the generation of active power is regulated in frequency control. The profile of active power curtailment for various countries varies from each other [9, 68].
5.2 Power Factor Requirements
The requirements of reactive power for wind power plants concern with the ranges of P–Q capability in different control modes. The control of reactive power aids in the compensation of transmission equipments like transformers and cables while also preserving voltage stability. As a result, PF requirement becomes a vital requirement in order to maintain efficient and reliable distribution and transmission networks. Various countries have different approaches for controlling reactive power where, the grid voltage varies depending on the short circuit impedance and power of the circuit. The detailed requirements may differ depending on the country and the capacity of wind power plant. The reactive power control mode, PF control mode, and voltage control mode are the three control modes commonly required by European grid codes. The majority of countries specify the range of reactive power requirement between 0.95 lagging to 0.95 leading, as indicated in Table 3 [9, 68].
5.3 Power Quality and Harmonic Requirements
With respect to power quality requirements, Denmark has the majority of detailed power quality compliance requirements for WECSs. The requirements of power quality for WECSs are not clearly and well defined, thus the same requirements that are applied on the traditional power grids are used. For example, USA follows IEEE 519 while, Italy and Ireland apply IEC standards and China uses GB/T 14549 requirements. The Danish grid code provides higher standards for power quality requirements for WECSs with extra limits for total and partial weighted harmonic distortion and short circuit ratio as compared to conventional power plants. The power quality requirements differ according to the capacity of WECSs. For smaller WECSs, harmonic distortions limits are defined. However, harmonic distortion limits for larger WECSs are determined by voltage distortion to accommodate for local changes in grid impedance and WECSs capacity relative to grid capacity [9].
5.4 Fault Ride Through Requirements
The unexpected disconnection of large-scale units of wind power generation during faults causes the utility network to become unstable. Therefore, grid code requirements for FRT capabilities are provided to assure continuous operation, minimize excessive power losses caused by faults, assist grid recovery during a fault and reduce resynchronization issues. The zero-voltage ride through, low voltage ride through (LVRT), and high voltage ride through requirements are all covered by the FRT standard. The requirements of LVRT and zero-voltage ride are nearly identical where, during grid failures, the grid voltage drops to zero in the zero-voltage ride profile, whereas the grid voltage drops from 15 to 25% of its rated value in the LVRT profile. LVRT requirement is described using voltage–time characteristic curves, which also represent the minimum allowable voltage sag. Figure 7 shows a general LVRT capability curve for WECS. The grid codes for LVRT determine the allowable fault voltage (VFault), fault time (Tfault), recovery time (Trecovery), recovered voltage within recovery time (VRecovery) and the settling time (Tsettling) as shown in Fig. 6. These LVRT requirements limits may differ from one country to another [68, 69].

General LVRT capability curve for WECS
The classification of different types of LVRT techniques for grid-connected based WECS is shown in Fig. 8. These techniques may be classified into two groups. The first sort contains hardware modifications, while the second type includes changes to the traditional controllers for DFIG. There are two types of hardware-based LVRT methods, the first method employs protection circuits, while the second employs reactive power injection devices [68, 69].

LVRT approaches classification for grid-connected based WECS
The crowbar protection is the most commonly known hardware-based LVRT technique for DFIG based WECS. It is an electrical circuit made up of resistors that are linked across the terminals of rotor winding. Figure 9a depicts the configuration of LVRT capability using crowbar protection for DFIG based WECS. The enhancement of crowbar protection circuit is performed by combining the series RL circuit and crowbar resistance to overcome the negative effects of crowbar resistance circuit or by integrating the crowbar circuit with dynamic series resistance [68,69,70]. Passive resistive hardware known as a stator damping resistor (SDR) is connected to the winding of stator for DFIG in a cascaded connection. As shown in Fig. 9b, three resistors are connected in parallel with a static bidirectional bypass switch. The key advantage of SDR is that, unlike the crowbar protection strategy, the generator will not be disconnected and will continue to deliver power during disturbances that improve grid stability [68, 70]. The DC-link voltage may increase over the maximum allowable limits during fault occurrences therefore, the power electronic switches and DC-link capacitor may damage. This problem may be solved by cascading chopper circuit to the DC-link capacitor as shown in Fig. 9c. The principal disadvantage of this method is that it wastes energy rather than storing it such as an energy storage system, although it is less expensive than a storage system [68, 71]. Dynamic voltage restorer (DVR) comprises a voltage-source converter that is placed in series between grid and DFIG to enhance LVRT requirement. DVR can compensate the sag and swell of voltage and harmonics. DVR is connected in series at point of common coupling (PCC) for voltage injection, allowing for the adjustment of reactive and active power in the grid, that aids in fault recovery as illustrated in Fig. 9d [68, 72].

LVRT capability for DFIG based WECS using a crowbar protection, b SDR, c DC-link chopper, d DVR
For PMSG based WECS, power fed into the grid begins to decrease during grid failures. As a result, the grid-side converter controller is unable to detect voltage drop at PCC, and the generator-side converter stays to supply real power to the DC-link capacitor. This active power imbalance raises DC-link voltage, which may damage capacitors causing the saturation of generator, and increasing the stress of voltage on the grid-side and generator-side converters. To overcome these problems, LVRT methods are used [68, 69, 73]. As shown in Fig. 10a, the energy storage system (ESS) is connected to DC link through a buck-boost converter for LVRT improvement. ESS absorbs the excess energy of the DC link during fault, preventing the DC link from overvoltaging. The most popular types of ESSs used for enhancement of LVRT capability are batteries, flywheels, electrical double-layer capacitors, and superconducting magnetic ESS [68, 74]. LVRT capability using braking chopper is an active crowbar circuit that relies on external devices for LVRT enhancement. It comprises a switch and a high-power resistance connected in parallel with DC link of PMSG as shown in Fig. 10b. It features cheap cost and a simple control structure [68, 73]. The pitch angle control (PAC) is recently implemented to enhance the LVRT for PMSG based WECS through some modifications to the controller. PAC is generally employed to reduce the input of power in the event of gusty wind. Figure 10c shows a simple PAC for the capability of LVRT for PMSG based WECS. The normal control mode will stay active for all wind speeds greater than the rated value. The PI controller, which operates with regard to voltage changes, is employed to adjust the value of pitch angle reference during instances of drop in grid voltage. The major drawback of this scheme is slow response to the dips of grid-side voltage but, the main advantage of this approach is quite inexpensive [68]. Flexible AC transmission system (FACTS) is an advanced technology that depends on the power electronic devices. FACTS has been utilized to protect sensitive loads with great effectiveness from damping and transient oscillations, as well as the sags of voltage. Lately, FACTS devices have developed as a viable option for keeping wind turbine systems linked to the electrical grid in the event of fault occurrences. These devices are classified into three types with regard to their connection, which includes shunt, series, and hybrid connections. The common types of FACTS devices used in PMSG based WECS for LVRT requirements are DVR, static VAR compensator (SVC), static synchronous compensator (STATCOM), and unified power flow controller (UPFC). The arrangement of LVRT capability using different types of FACTS devices for PMSG based WECS is illustrated in Fig. 11. For PMSG LVRT applications, the most efficient FACTS device is the UPFC, despite its high cost [68, 73].

LVRT capability for PMSG based WECS using a ESS, b Braking chopper, c PAC

LVRT capability for PMSG based WECS using FACTS devices: a STATCOM, b SVR, c DVR, d UPFC
5.4.1 Recent LVRT Methods
In recent years, cost-effective LVRT approaches for WECSs have been introduced. Table 4 presents recent modified control methods for enhancing LVRT capability. This subsection presents some interesting background papers about improving LVRT during the past 4 years as follows:
In [75], Priyavarthini et al. presented a novel approach for usage of DVR to adjust reactive power requirement for the fixed speed wind generator along with FRT regardless of reducing the swell and sag of grid voltage. The mitigation of swell and sag was performed by proposed phase angle control. The key features of the proposed control are maintaining constant phase shift between the voltage of grid and generator, better DVR usage is obtained without affecting on wind generator steady state operation, and no effect on the active power provided by generator to the grid. In [76], Yan et al. introduced a non-linear adaptive controller for the ESS embedded DVR in order to enhance LVRT requirements for WECSs. The ESS embedded DVR was controlled by proposed control to rapidly compensate the dips of grid voltage for supporting the voltage of PCC and store the blocked power of wind to overcome the possible variations of wind energy. In [77], Tilli et al. proposed a novel control technique for the rotor-side converter for DFIGs to endow WECS with efficient LVRT capability under severe unbalanced and balanced grid voltage decreases. The proposed control was depended on the arguments of nonlinear control theory which were employed for the design of controller to mitigate oscillations of rotor voltages and currents where, the system will not disconnect for protection. In [78], Tripathi et al. presented a simple control approach for the improving of LVRT capability for PMSG based WECS. The major idea of this approach was that the altering between the variables of reference control of the grid-side and stator-side converters for keeping the DC-link voltage in the safe range during the occurrence of grid voltage drops by storing excess real power in the inertia of system. In [79], Hossam-Eldin et al. introduced the parallel switched DVR with modified feedback control for the improvement of FRT capability in DFIG based WECS under abnormal conditions. In [80], Mosaad et al. presented a model-free adaptive control for UPFC for improving the FRT capability of the DFIG based WECS during several disturbance events and the overall dynamic performance during wind gusts. The proposed control is employed to control the shunt and series converters of the unified power flow controller. In [81], Asghar et al. presented a novel structure of modified switch type fault current limiter for enhancing LVRT capability of the DFIG based WECS. The proposed system involves of two parts. The first part is diode bridge, IGBT switch and snubber circuit while the second part is the major part, which consists of a limiting inductor connected in series with the main line. In [82], Ali et al. introduced a modified control for rotor-side converter to improve LVRT capability for DFIG based WECSs during the occurrence of grid faults. This research focused on the reduction of DC-link voltage fluctuations and rotor overcurrents. To improve the transient performance for the rotor-side converter control, additional voltage terms were injected into the references of rotor voltage. In [83], El-Naggar et al. proposed an optimum PI controller for 4-phase 8/6 switched reluctance generator to control the off-delay angle to improve LVRT capability for WECS during the variations of wind speed and faults. In [84], Raghavendran et al. presented reduced order generalized integrator based negative–positive sequence control with the purpose of controlling grid-side converter of PMSG for FRT capability in order to preserve the parameters of system stable under faults. In [85], Senapati et al. introduced an adapted demagnetization control scheme and an external resistor on the rotor and stator side of DFIG to enhance the LVRT capability. By lowering the time constant, the external resistance in the stator accelerates the transient flux damping. In [86], Nasiri et al. introduced a control approach based on sliding mode control for braking chopper during grid faults and normal conditions for PMSG based WECS. In [87], Manohar et al. introduced a hybrid technique control model for improving the LVRT capability of DFIG. The hybrid technique was the combined implementation of both random forest and modified elephant herding algorithms.
The objective function that considers multiple parameters related to LVRT such as active and reactive power, voltages, and currents was solved by modified elephant herding method. While, the random forest technique was used to predict the optimal control signals of generator-side converter. In [88], Du et al. proposed a novel modified bridge-resistive-type superconducting fault current limiter for the enhancement of FRT capability for DFIG. The comparative analysis between the traditional superconducting fault current limiter and the proposed limiter shows that the proposed method can enhance LVRT capability during the fault occurrence and after its removal.
6 Electrical Controllers
This section presents an overall view of electrical controllers that are used for WECSs, such as converter controllers, MPPT controller and frequency controller.
6.1 Converter Controllers
The controllers for generator-side and grid-side converters are the major controllers that are used in grid connected WECSs. These conventional controllers are discussed as follows:
6.1.1 Generator-Side Converter Control
The purposes of the controller for generator-side converter are to perform perfect decoupling control of the machine flux and torque in order to regulate its speed, extract maximum power from wind, and regulate the active and reactive components of machine current. Direct torque control and field-oriented control are two major control types used to achieve these goals in an efficient way [15, 89]. Blachke introduced field-oriented control in 1969 to regulate the generator speed by changing the amplitude, phase, and frequency of stator current. This approach has a number of advantages, including low reactive and active power ripple, good steady state performance, minimal switching loss, constant and low converter switching frequency, and robustness against measurement noise. However, it has a number of drawbacks, including a lot of online calculation because of pulse width modulation, slow transient response under grid failure circumstances because of limited control bandwidth of PI controllers, dependence on the grid filter parameters change, the difficulties of parameter tuning, and reducing the robustness under varying operating conditions [15, 89, 90]. Direct torque control has many advantages as compared with vector control like no requirement for coordinating transformations that lead to decreasing the compensation burden, quicker dynamic response, no requirement for an internal current control loop, perfectly decoupled system, and simplicity. The torque of the generator can be varied either through adjusting the torque angle or flux. The major disadvantages of this control are variable switching frequency operation, high current total harmonic distortion, high error of tracking, and large filter inductance. The use of space vector modulation based direct torque control can solve the difficulties of variable switching frequency operation while also reducing the filter inductance size [15, 89, 91].
6.1.2 Grid-Side Converter Control
The functions of grid-side converter are controlling of reactive and real power in the grid, adjusting DC-link voltage, grid synchronization, and ensuring high-quality injected power. Grid-side converter configuration is independent of the type of generator. The voltage-oriented control and direct power control are two types of grid-side converter control [15, 89]. To perform grid synchronization, voltage-oriented control used a synchronous reference frame phase-locked loop. It has several advantages such as quicker tracking ability, high sensitivity under sudden parametric change, higher injected power quality, no need for voltage vector switching states, and operating in both variable and fixed switching frequency. The drawbacks of employing this type of control are weak dynamic response, complex implementation, and the requirement for co-ordinate transformation block [15, 89]. Direct power control technique is similar to the direct torque control used in the generator-side converter. It uses a voltage vector state for the control of reactive and active power. It has many advantages such as simplicity due to no necessity for an internal current control loop, robustness, rapid transient response, close unity power factor, no need for pulse width modulation and co-ordinate transformation, and stable operation under parametric change. The disadvantages of this method are increasing of total harmonic distortion, high current ripples, and increasing of filter size, and poor performance when the operating point of the converters reaches its rated power [15, 89, 91].
6.1.3 Recent Converter Controllers
Table 5 presents recent control methods for grid-side and generator-side converters during the past four years which are summarized as follows:
In [92], Giannakis et al. presented a sensorless decoupled P-Q control for DFIG based WECS with intelligent controllers. The estimation of the rotor speed and position was achieved by modified phase-locked loop instead of using mechanical sensors to measure them. The whole implemented control method was based on fuzzy logic controllers that were employed for tuning the gains of PI controllers instead of constant gain. In [93], Debouza et al. introduced a disturbance observer based control scheme for grid connected DFIG. The proposed control comprises disturbance observer and state-feedback controller which was used to eliminate the steady state error by compensating for model uncertainty. In [94], Xiong et al. proposed a fractional order sliding mode control based direct torque control approach for grid connected DFIG with the purpose of adjusting the output reactive and real power for DFIG directly. In [95], Harrabi et al. presented a Takagi–Sugeno fuzzy control technique for WECSs. The WECS system was divided into two interrelated subsystems to make modelling easier. After that, each subsystem was represented by a Takagi–Sugeno fuzzy model. In [96], Merabet et al. introduced an overall sliding mode control method for controlling the currents and powers of stator and grid and adjusting DC-link voltage for DFIG based WECS. The improvements of robustness to uncertainties and tracking performance were achieved by sliding mode control law structure, integral and sliding terms, and compensating combination. In [90], Mohammadi et al. proposed combined control scheme based on virtual flux direct power control and vector control for grid-side converter of DFIG based WECSs to take the advantages of two controllers. In [97], Soliman et al. presented a novel cascaded control approach based on genetic algorithm and adaptive neuro-fuzzy inference system for controlling both the grid-side inverter and the generator-side converter. The proposed control was designed by using the data of dynamic response for the studied system with PI controllers under various wind speed conditions. In [98], Morshed et al. proposed an integral terminal sliding mode-based control for both the rotor-side and grid-side converters of DFIG based WECS under disturbances and unbalanced voltage conditions. In [99], Mbukani and Guleet al. presented a phase-locked loop based high-order sliding mode observer estimator for the sensorless vector control of the rotor of DFIG based WECS using a slip speed and angle estimator. In [100], Djilali et al. introduced a real-time neural sliding mode field oriented control for DFIG based WECS connected to the grid. This control approach relies on high-order recurrent neural network identifier which is trained online by an extended Kalman filter which is employed to approximate DFIG mathematical models and DC link. In [101], Abo‐Khalil et al. presented a multivariable state feedback current controller with a feedforward component for enhancing the transient and steady-state characteristics of controller. Multivariable state feedback controllers were proposed to substitute the PI controllers on the grid-side and rotor-side converters. In [102], Moradi et al. proposed an adaptive sliding mode type-2 neuro-fuzzy controller for DFIG power control. Due to the changes in parameters in WECS and uncertainties in wind speed, the proposed control used an interval type-2 fuzzy system. Sliding mode control was employed to train online the membership functions parameters of type-2 fuzzy controller to improve its performance. In [103], Rocha-Osorio et al. introduced a deadbeat-fuzzy controller for improvement of the steady-state response of DFIG based WECS. The proposed control was compared with conventional deadbeat power controller and a classical DFIG PI controller. It was concluded that the proposed deadbeat fuzzy controller is an appropriate solution to the rotor-side control. In [104], Amin and Uddin presented a novel adaptive backstepping based nonlinear control method for the controller of rotor-side converter to reduce machine losses and to overcome parameter uncertainties to improve transient performance and ensure stability of the grid connected DFIG based WECS. In [105], Xiong et al. introduced a fractional order sliding mode control scheme for PMSG to improve the quality of output power. The proposed control was used to control both grid-side and generator-side converters. The boundaries of controller coefficient were decided by stability analysis based on Lyapunov function and then the optimal parameters were obtained by the gravitational search technique. In [106], Samanes et al. proposed a simple sub-synchronous resonance control approach which employed in the rotor-side converter with variable gain in PI controller regulated as a function of DFIG rotational speed. In [107], Huang et al. presented a fixed-time fractional-order sliding mode controller for PMSG based WECS for power quality enhancement. The proposed control was implemented in the rotor-side converter and grid-side converter for stabilizing PMSG based WECS within an upper limited convergence time and for improving the dynamic performance. In [108], Patel et al. introduced a command-filtered integral backstepping controller for controlling the rotor-side converter in DFIG based WECS. By adjusting the electromagnetic torque, this controller basically stabilizes the speed of rotor. The Lyapunov criteria were employed to establish the overall stability of closed loop system and controller parameters were optimally determined by using particle swarm optimization. In [109], Sami et al. presented a Gaussian process regression based fuzzy fractional-order terminal sliding mode control for DFIG based WECS. It is a hybrid of fuzzy control and fractional order control, which solves the issues of inherent chattering in both conventional controllers while preserving system stability and robustness. This research also proposed a new wind speed estimation approach based on Gaussian process regression where, its inputs are rotational speed and wind turbine power. In [110], Noussi et al. introduced an adaptive multi-objective sliding mode control for DFIG based WECS. The proposed control was designed to control both the rotor-side converter and the grid-side converter. The difficulties of the control problem that are represented by external disturbances and the uncertainty and nonlinearity of the system dynamics were solved by the proposed control. In [111], Bossoufi et al. proposed a nonlinear adaptive backstepping control scheme for DFIG based WECS. To ensure the system stability, the backstepping control approach used the Lyapunov nonlinear algorithm. It was employed on both the rotor-side converter and the grid-side converter and then enhanced by using estimators to make the proposed system more robust against parametric change.
6.2 MPPT Controllers
With the growing usage of wind generators in power grids, it is necessary to extract the available maximum wind power. Therefore, WECSs must track or operate at maximum power point (MPP). The wind turbine produces rated power (Prated) at a certain speed of wind (Vrated). The control of output power for wind turbine can be performed more efficiently within a certain bounded wind speed range between cut-in speed (VCut-In) and cut-out speed (VCut-Out). For safe operation for both the generator and turbine, turbine must not be operated outside of this range. Figure 12a illustrates the four major operational zones of wind turbine. In the second region, the controller of wind turbine begins to operate to extract the maximum possible wind energy [112, 113]. For a wind turbine exposed to a wind of velocity Vw (m/s), has a blade radius R and a swept area by blades A (m2); the power extracted from wind can be calculated from:
where Pm is the output power of turbine (watt), ρ is the air density (kg/m3), CP is the power coefficient of turbine which is a function of tip speed ratio (λ). The tip speed ratio of wind turbine is defined as follows where \({\omega }_{m}\) is the mechanical rotational speed of the turbine (rad/s):

a The operating regions of wind turbine, b Turbine characteristic for various wind speeds
From the equations from (1) to (2), the output power is primarily dependent on turbine power coefficient value and this depends on wind turbine rotor speed. For a certain wind speed, the optimal power coefficient values and blade tip speed ratio occur at only one optimal rotor speed for maximizing the extracted power. For operating the system at MPP in all operational circumstances, the turbine rotational speed should be changed as the speed of wind varies instantly.
The nonlinear power-speed characteristics of a turbine at various wind speeds is depicted in Fig. 12b. The wind turbine output power can be maximized by regulating the rotational speed of turbine rotor at optimal value, and maintaining operating points at optimal power coefficient value [112, 113]. Figure 13 shows the classification of MPPT techniques which are divided into main categories in general; indirect power controller, direct power controller, hybrid MPPT techniques, and smart MPPT techniques. The indirect power controller based MPPT algorithms increase the output power by adjusting the mechanical power according to pre-stored data of power-speed curves. While, the direct power controller based MPPT algorithms analyze the alteration of electrical output power for tracking the MPP. In this subsection, a brief review of several MPPT algorithms is discussed and is summarized in Table 6 [112,113,114].

The classification of MPPT approaches
6.2.1 Indirect Power Controller Based MPPT Algorithms
6.2.1.1 Power Signal Feedback Algorithm
This method necessitates knowledge about the curve of maximum power for a wind turbine as shown in Fig. 12b, which is followed by its control methods. Experimental tests or simulations can be used to obtain maximum power curves for individual wind turbines. The block diagram of power signal feedback (PSF) MPPT algorithm for WECS is shown in Fig. 14a. Look-up table is employed in this algorithm for recording the optimal power and its corresponding wind turbine speed. The main drawback of employing this algorithm is that it necessitates the use of several sensors to obtain previous knowledge about reference power. However, it is robust and cost-effective approach [112,113,114].

The block diagram for a PSF MPPT, b TSR MPPT, c OT MPPT
6.2.1.2 Tip Speed Ratio Algorithm
It is necessary to maintain the tip speed ratio at an optimum value, where the extracted power is maximized by adjusting the rotational speed of generator. It needs to measure the speeds of wind and generator to get the optimal tip speed ratio (λopt) of turbine for extracting possible maximum power. The optimal rotational speed is determined from Eq. (2) as:
The block diagram of tip speed ratio (TSR) algorithm for WECS is shown in Fig. 14b. There are two primary ways to obtain wind speed; wind speed estimation or mechanical sensors. For mechanical sensors method, numerous anemometers are mounted around the swept area of wind turbine to measure the wind speed. These anemometers have low accuracy which leads to a reduction in the total efficiency and reliability with high maintenance and initial costs. While for wind speed estimation method, the operating wind speed can be calculated by accurate wind speed estimation algorithms to overcome the disadvantages of anemometer [112, 114].
6.2.1.3 Optimal Torque Algorithm
The generator torque is regulated in this method to get optimum reference torque curve based on the wind turbine peak power at a particular wind speed. The expression of mechanical optimal torque for the turbine if the rotor is rotating at optimal tip speed ratio and power coefficient is:
The block diagram of optimal torque (OT) MPPT algorithm for WECS is illustrated in Fig. 14c.
This algorithm is widely used in WECSs because of its advantages such as fast tracking with high efficiency and simplicity. But this algorithm needs prior information about the mechanical parameters of turbine as well as weather conditions [112,113,114,115].
6.2.2 Direct Power Controller Based MPPT Algorithm
6.2.2.1 Perturb and Observe Algorithm
Perturb and observe (P&O) method is widely employed in WECS for maximum power extraction by searching for the MPP. It depends on disturbing a control variable in some step size and detecting the resulting variations in the objective function till the slope becomes zero. Therefore, it does not require anemometers and prior knowledge about wind turbine parameters [112,113,114]. This method is slow and detects wrong direction to reach the MPP during fast wind variations. The modified and adaptive step P&O algorithms efficiently solve this problem. These modified methods achieve an appropriate balance of control efficiency and tracking speed, as well as solving incorrect directionality problem of P&O algorithm under changing wind conditions. The direction and size of variable step for the next perturbation are intelligently decided by observation of the distance between the optimal curve and operating point. The block diagram of P&O MPPT algorithm for WECS is shown in Fig. 15a [112,113,114].

The block diagram for a P&O MPPT, b IC MPPT, c ORB MPPT smart MPPT algorithms
6.2.2.2 Incremental Conductance Algorithm
This method does not need any sensors and generator and turbine parameters, resulting in improving system reliability and lowering costs. The output power of turbine can be expressed as a function of DC-link voltage where, there is an optimum DC-link voltage that maximizes the generator output power. Because power equals the product of voltage (Vdc) and current (Idc), the slope can be calculated as:
For MPP, the expansion of this derivative is as follows:
The basic concept is that the tangent slope of power–voltage characteristic must be zero at MPP, negative on the right side, and positive on the left side of MPP. Therefore, this method can tackle MPP by looking for rectifier output power rather than the observation of weather-dependent parameters such as wind direction and wind speed. The block diagram of incremental conductance (IC) MPPT algorithm for WECS is illustrated in Fig. 15b. The performance of the IC MPPT algorithm can be enhanced by employing automatically adjusting the variable step size for Vdc changes. These modified IC algorithms provide convergence speed improvement and decrease the power variations around MPP [112,113,114].
6.2.2.3 Optimal Relation-Based Algorithm
This MPPT method is based on the optimal relationships between variables such as turbine output power, wind speed, converter power, and DC current and voltage of converter, etc. The benefit of this method is not requiring a speed sensor or the use of a lookup table. It works on the basis of a previously established power versus DC current curve where, the MPP can be tracked at all times by working on the optimum current curve. The DC current for a certain wind speed must not exceed the curve of maximum current in order to maintain generating. The approximate relation between the optimal DC current (\({I}_{\mathrm{dc}}^{\mathrm{opt}}\)) and the optimal DC voltage (\({V}_{\mathrm{dc}}^{\mathrm{opt}}\)) when the system is at MPP is as follows:
It is obvious from Eqs. (4) and (5) that if k is known by the control action, it is possible to determine the optimal curve and effectively apply the optimal relation based (ORB) MPPT method. The block diagram of ORB MPPT algorithm for WECS is shown in Fig. 15c [112,113,114].
6.2.3 Hybrid MPPT Algorithms
The hybridization of two or more MPPT methods is an effective and simple technique for overcoming the disadvantages of the classic MPPT algorithms. The ORB MPPT technique is adopted with self-tuning capability by employing the traditional P&O method. There are two modes of operation for this method. The first mode is using initially the traditional constant step P&O MPPT technique for searching for MPP at any wind speed. Then, the unknown parameter (k) in the ORB method may be easily computed once the MPP has been identified and the current and voltage are measured. The optimum current curve can be calculated after the k is obtained. The hybrid MPPT method then changes to the second mode, which can track the MPP using the ORB method equation. The PSF, OT and IC techniques can also be used with the P&O method to solve the shortcomings related to P&O algorithm, such as incorrect directionality during fast wind speed changes [112,113,114, 116, 117]. Many alternative MPPT methods are used by employing intelligent controllers, like the neural network (NN), fuzzy logic controller (FLC), and other soft computing techniques. Additionally, other MPPT algorithms use meta-heuristic optimization techniques to avoid the limitations of traditional MPPT algorithms. Currently, soft computing methods are the popular choice for WECSs since they do not necessitate any mathematical parameters for WECS. But its disadvantage is the inaccuracy of its optimal response to the control variables. Therefore, several adaptive methods are developed to deal with the uncertainty of system for optimal circumstances without the need for mechanical sensors. Furthermore, the multivariable P&O MPPT algorithm is more effective for MPP tracking in WECSs [112,113,114].
Various control methods have been presented for MPPT applications that employ FLC either alone or in combination with other approaches. The major advantages of this controller are that the controller parameters can be varied relatively fast in response to system dynamic changes without parameter estimation, less oscillations around the MPP, and strong performance when changing the climatic conditions. However, their advantages are extremely dependent on the ability of user to select the appropriate surface error, membership function levels, and selection of the rule-base layer with significant memory space requirement. The NN algorithms have been significantly expanded for the MPPT applications where, they are used in several research studies to improve their proposed MPPT methods. In general, the NN structure has three layers: input, hidden, and output layers, with variable nodes number depending on the user judgement.
The optimum state of various control variables, as well as the inputs and suitable weights of layers are regulated by NN algorithms. Terminal voltage, pitch angle, wind speed, rotor speed, output torque, or any combination of these variables can be used as input variables. The output is commonly a reference signal such as reference rotor speed, power, torque, etc. which is employed to drive power electronic circuit to force WECS to operate at the MPP [112,113,114].
The adaptive MPPT technique, on the other hand, can measure uncertain system parameters and gives an accurate optimum response. It is dependent on a vector control scheme that transitions between multi-operational modes based on the detection of changeable wind speed. This approach is especially adapted to changes in climate using these specially-designed modes, resulting in significantly improving the performance of tracking [112,113,114, 118]. The goal of multivariable P&O MPPT technique is maximization the produced output power of wind farm while lowering the need for sensors and control units. Such this technique makes wind power plants economically viable since the extracted power is the same as that of conventional wind farms with decreasing required components number. The P&O MPPT method extension is adopted for optimizing the currents of all generators existing in the wind farm for maximization of the output power of wind farm. Using the P&O concept, the multivariable P&O MPPT method is developed for optimization of the operating point for each generator. The current of the first generator is perturbed in this approach, while the aggregated output power rises. The procedure is carried out frequently to cover all the available generators in the wind farm [112,113,114].
6.2.4 Recent MPPT Algorithms
This subsection introduces the overall view of the recent research on the improvement of MPPT algorithms. In [119], Yang et al. presented a novel passivity-based sliding mode control approach for achieving MPPT for PMSG based WECS. This study was concluded that the proposed control achieves MPPT quickly with less overshoot under gradual and random wind speed changes. In [120], Zhang et al. introduced an improved MPPT control scheme which is based on decreasing torque gain control method. It dynamically adjusts the gain coefficient to maximize energy capture in low wind locations. In [121], Chen et al. proposed a robust MPPT control approach for a grid connected PMSG based WECS by using perturbation and observation based nonlinear adaptive controller for enhancing the efficiency of energy conversion. Parameter uncertainties, system nonlinearities, and external disturbances are represented as lumped perturbation term that is estimated by high-gain perturbation observer in the proposed approach. In [122], Chen et al. presented a novel robust data-driven approximate optimal MPPT control method for WECS by using the adaptive dynamic programming technique combined with a recurrent neural network. A recurrent neural network first constructs a data-driven model to recreate the dynamics of wind power system by employing available input–output data. Then, adaptive dynamic programming method is used to create the approximation optimum tracking controller, that comprises of the optimal feedback and steady-state controllers. In [123], Youssef et al. introduced an intelligent self-adaptive P&O and fast-hybrid P&O techniques for WECSs for enhancing the dynamic performance and overcoming the limitations of current P&O methods. The proposed methods depend on the estimation of the optimal relationship between rotor speed and power to accurately adapt step sizes perturbation under various environmental conditions. They decrease MPP search area to 10% of the optimum power and speed curve with on need for prior knowledge of perturbation step-sizes and without dividing the curve into modular operation sectors. In [124], González-Hernández et al. proposed a novel MPPT PI discrete reverse-acting controller based on TSR method for WECS for the extraction of peak power from wind, maintaining a basic structure which can be easily implemented in any reasonably priced numerical digital processor. In [125], Wang and Bo presented adaptive fixed-time control approach to the MPPT algorithm for DFIG based WECS. The fixed time observer was employed for the estimation of aerodynamic torque without the need to wind speed sensors. Next, without knowing the upper limits of the system uncertainties in advance, an adaptive fixed-time controller was presented for implementing optimum rotation speed tracking for MPPT. In [126], Buduma et al. introduced a robust new control and Kalman filter for a grid-connected WECS for controlling the reactive and real power. The proposed Kalman filter based MPPT was developed for high gain boost converter that improves the performance of maximum power tracking.
6.3 Frequency Controller
Nowadays, the power networks inertia has been decreased as wind energy has become more widely integrated into the current power grid. In the event of a substantial frequency disturbance, the capability of system frequency regulation tends to deteriorate. Therefore, wind turbines can participate in controlling the network frequency to maintain the network frequency stability. Inertia and droop controls are commonly used for frequency control using derivative and proportional control. Figure 16 shows the response of grid frequency under power disturbances [127,128,129,130]. To ensure that variable speed wind turbines perform the function of frequency regulation correctly in accordance with certain requirements of frequency regulation, supplemental controllers must be developed and integrated into both the existing pitch angle control loop and the converter power control loop for manipulation of the corresponding reference set points of real power, torque, or the speed of rotor. A variable speed wind turbines must be operated in a suboptimal mode through deloaded control to participate in secondary, primary, and tertiary frequency control. This guarantees that a specific amount of spinning reserve margin is available at all times to provide additional real power in the case of frequency contingency. Currently, primary reserve is generally established by balance, delta, or fixed reserve control. A constant percentage of rated power is reserved through balance control while, delta control reserves a certain percentage of the available peak real power. For fixed reserve control, a constant amount of real power is reserved. The level of the reserve margin depends on the magnitude of the prevailing wind speed, the wind speed prediction accuracy, and the upper permissible limit of the variable speed wind turbine rotor speed [125,126,127,128].

The grid frequency response under power disturbances
The primary frequency control of WECS is similar to that of a traditional generator, which normally within a few tens of seconds is activated and continued for up to 15 min as soon as the deviation of grid frequency exceeds the permitted threshold. For emulating the conventional governor response, droop control is used in variable speed wind turbine for correlating the changes in the frequency of grid with corresponding changes in the output of real power via the controller of power converter. It adjusts the output of power in response to large grid frequency changes. The relationship between frequency deviation and real power change can be expressed as [127,128,129,130]:
where f0 is the rated frequency and the parameter (Kdr) is the speed droop inverse (R) which is defined as follows:
Secondary frequency control is employed both under normal operating conditions and during emergency frequency occurrences. It begins within seconds and lasts for multiple tens of minutes. This control is a continuous response on the minute timescale for allocating the change of load among individual wind turbines with the goal of keeping the tie line power flow and system frequency deviations at zero. The secondary frequency controller based on the wind farm supervisory control system fully uses secondary frequency reserve to adjust the power flow and follow up the commands from the system operator [127,128,129,130]. Tertiary frequency control has longer decision time step from minutes to hours in comparison to the other frequency controls. It takes action after secondary control. It includes dispatching procedures from the operator of system to accomplish power reserve and recovery for tertiary frequency control for WECS in order to provide economic dispatch, unit commitment, and optimal power flow in response to market signals or other system requirements [127,128,129,130]. The use of combination of different frequency controllers can improve overall frequency regulation performance of power system and reduce the stress of frequency regulation in traditional units. The coordinated frequency control process can be described as follows. Once occurring frequency drop, the inertial response plays a vital role in the reduction of frequency change rate and the increase of frequency nadir point. When the dead-band condition for a certain delay time is satisfied, primary frequency response is activated to further improve the frequency regulation by droop control till the frequency reaches to secondary steady state. Then, secondary frequency control is employed to accomplish zero frequency error regulation by using PI controller [127,128,129,130].
6.3.1 Recent Frequency Control Methods
This subsection provides an overview of recent research on frequency regulation control methods, which are discussed below:
In [131], Zhang et al. presented a frequency regulation control approach by wind power based on limited over-speed de-loading curve partitioning. The range of over-speed control was quantified, and the restricted over-speed de-loading curve was developed and fitted. This technique improves the usage of over-speed de-loading while also improving the wind turbine frequency regulating capability. This study was concluded that the proposed approach can efficiently enhance the frequency stability and system inertia and enhance the response of frequency under complex operating conditions for wind power systems. In [132], Peng et al. introduced a novel fuzzy theory based coordinated control approach to enhance the short-term frequency response capability of a DFIG-ESS. Four wind speed zones were categorized because of making the short-term frequency response capability of the DFIG-energy storage system adaptive for different conditions of wind speeds. Two types of FLCs were designed and used in the proposed control where its inputs are DFIG operation state and frequency deviation and the its output are DFIG participation coefficient for short-term frequency support and the power support from the combined system. The results of simulation were demonstrated that the proposed control can efficiently enhance the short-term frequency response capability of the DFIG-ESS under different wind speed conditions. In [133], Hu and Wu proposed a new linear-gain droop control loop for a DFIG based wind farms to approximate the capability of frequency control. The gain of droop is proportional to the rotor speeds of wind turbine. The proposed linear droop gain can provide a satisfactory approximation to the quadratic droop gain by selecting the suitable coefficients of the linear function. The results of simulation demonstrated that the proposed scheme is able to closely approaching the kinetic energy-based droop control loop. In [134], Li et al. presented a de-loading control approach which combines pitch control and over speeding of wind turbines operating at varying wind speeds. The proposed control approach can regulate wind turbines static frequency difference coefficient, that is dependent on the proportion of variable-speed wind turbines running at high speeds of wind. Additionally, it supports frequency control of the grid under power limitations, and appropriately supports frequency regulation for wind turbines operating at various wind speeds. This study was concluded that the control approach can enhance the primary frequency control performance. In [135], Verij Kazemi et al. introduced a new approach for adaptive tuning of gains for second-order derivative terms (PDD2) controller in DFIG for frequency control. The proposed approach is based only on control system output and input data, which aids in overcoming system modelling problems. A parabolic sliding-mode filter was also employed to eliminate measured frequency noise. The results of simulation were indicated that the efficacy and robustness of the proposed control in the steady state and transient for supporting grid frequency in wind turbine. It enhanced the frequency nadir by minimum 18% as compared to the conventional frequency control approaches. In [136], Xu et al. proposed an enhanced droop control method for a DFIG which can reduce the maximum frequency change rate and frequency nadir during the frequency regulation. The proposed droop control coefficient is a linear function of the frequency change rate. So, it can regulate the control coefficient according to the frequency change rate. This study was concluded that the proposed approach is more successful in improving the maximum rate of frequency change and frequency nadir under varied disturbance sizes, even with fluctuating wind speed. In [137], Yang et al. presented an improved frequency control strategy using dynamic droop coefficients of type 3 WECS that effectively mitigates system frequency variations. The results of simulation were indicated that the proposed frequency control method is useful to enhance the capability of frequency regulation under several patterns of wind speed and the penetration levels especially for power systems with highly wind generation. In [138], Chen et al. introduced a technique for the estimation of the virtual moment of inertia given by a DFIG-based wind farm with additional frequency control. Routh approximation was used to derive the explicit formulation of the virtual moment of inertia for grid connected DFIG-based WECS. The proposed expression of the virtual moment of inertia is validated by numerical results tested by a modified IEEE 30-bus system and DFIG grid-connected system. It was concluded that the proposed estimation method is conventional for power systems with a lot of wind energy. In [139], Yang et al. proposed an adaptive droop control approach with smooth rotor speed recovery capability for type 3 WECS for adjusting the time to meet MPPT curve, enhancing the frequency nadir, and minimizing the second drop in frequency. The first purpose was achieved by making the ratio of the proposed control output to MPPT output reference proportionate to rotor speed, which is mostly determined by wind speed. While, the two objectives were realized by the use of the proposed adaptive droop gain that reduces with time. It was concluded that the proposed control approach prevents DFIGs from stalling, improves the frequency nadir, and reduces second drop in frequency.
7 AI Techniques in Grid-Connected WECSs
The following section provides an overview of artificial intelligence (AI) techniques in grid-connected WECSs. Optimum control of large-scale wind farms and their integration into power grids is a vital challenge for providing reliable, effective, and secure electrical energy. As a result, AI techniques and soft computing methods can be used with conventional control approaches to effectively enhance the system performance in WECSs. Many soft computing-based optimization techniques like artificial NN, FLC, genetic algorithm, particle swarm optimization, etc. have been proposed for WECS. It is verified by many researchers that AI techniques can be efficiently employed in controller parameter tuning, MPPT, and LVRT methods for grid-connected WECSs. The recent AI techniques in grid-connected WECSs are tabulated in Table 7 [140,141,142].
7.1 AI Techniques for Controller Parameter Tuning
7.1.1 DFIG Based WECS
In [143, 144], Elkholy et al. presented an effective controller of wind turbine DFIG based on teaching learning-based optimization (TLBO) algorithm and artificial neural networks to have MPPT and optimal active and reactive power control. In [145], Yang et al. proposed a novel grouped grey wolf optimization for obtaining the optimum PI parameters of generator-side controller for DFIG-based WECS for achieving a MPPT together with improving FRT capability. The results of simulation showed that the proposed method can capture the maximum wind energy and efficiently restore the system after occurring a fault at the electrical grid. In [146], Madan and Kumar introduced an optimized LVRT control by using the grey wolf optimization technique with fuzzified error algorithm. This paper compared the proposed optimized method with other traditional optimization algorithms. It was concluded that the proposed technique is more effective in simulating the LVRT system as compared to other traditional methods. In [147], Bakir et al. introduced a bacteria foraging optimization technique to tune PI controllers parameters in a grid connected DFIG-based WECS. The effectiveness of proposed optimization strategy was assessed using a variety of performance criteria based on tracking errors. In [148], Alhato and Bouallègue introduced a thermal exchange optimization algorithm for obtaining the optimal gains of PI controllers for a DFIG-based WECS. The tuning of the gains of PI controllers was investigated as an optimization problem against non-smooth and nonlinear operational limitations. In [149], Memon et al. presented a salp swarm algorithm-based vector control to enhance the transient response of a BDFIG-based WECS. The proposed method was used for the tuning of PI controller to optimally adjust torque, current, speed, reactive, and active power of the system in the case of sharp variations in the load and wind speed. In [150], Nasef et al. introduced an optimum tuning of FLC for a 1.5 MW grid connected DFIG-based WECS by using intelligent methods like the gray wolf, particle swarm optimizer, multi-verse optimizer, and moth-flame optimizer for both grid and generator side controllers. A multi-objective optimization was proposed with the aim of reducing the steady-state errors of these controllers to enhance the transient operation of the system under variable wind speed conditions. It was concluded that moth-flame optimizer-FLC has the best performance as compared to other various optimization techniques regarding the convergence speed, controller step response and best fitness function value. In [87], Manohar et al. presented a hybrid algorithm which combines both modified elephant herding technique and random forest technique for improving LVRT capability of the DFIG based WECS. In the proposed method, several parameters related to LVRT like, current, voltage, and active and reactive powers were used as objective function which was solved by proposed method. In [151], B. Aguilar et al. proposed a particle swarm optimization for the tuning of the parameters of PI controllers for obtaining damped behaviour and minor peaks in the mechanical and electrical variables during the occurrence of electrical faults. The results of simulation showed that the proposed method is an effective for continuous and nonlinear problems, accomplishing an acceptable tuning of the PI controller parameters. In [152], Bakir et al. introduced a water cycle optimization technique for tuning six control PI parameters by reducing a cost function carried out using the tracking errors in rotor-side and grid-side controllers in a grid connected DFIG-based WECS. In [153], Han et al. presented a novel quantum parallel multi-layer Monte Carlo optimization for optimizing the rotor-side controller parameters based on PI of DFIG to achieve MPPT and enhance the efficiency of generation. The proposed method was used to obtain the best solutions in a precise small search space. This study was concluded that the proposed method can provide the result of optimization objective function of the rotor-side controller with at least 0.51% lower than other techniques and improve the average power coefficient of DFIG based WECS by at least 0.0028%.
7.1.2 PMSG Based WECS
In [154], Yang et al. presented a novel democratic joint operations optimization technique to obtain the optimal PID controllers parameters of PMSG-based WECS for achieving the optimal MPPT under several wind speed profiles. In [155], Qais et al. proposed a grey wolf optimization for tuning the optimal gain of eight PI controllers used in the control of generator-side and grid-side converters to improve the MPPT, LVRT capability and the steady-state operation by obtaining of the minimum of the summation of integral-squared error of produced real power error, DC voltage error, and terminal voltage errors of the grid and PMSG. In [97], Soliman et al. introduced a novel cascaded adaptive neuro-fuzzy inference system-genetic algorithm based control strategy to improve the performance of the PMSG based grid-connected WECS. The proposed control strategy was employed to control both of the grid-side and generator-side converters where, GA algorithm was proposed to adapt the ANFIS parameters. In [156], Qais et al. presented an optimal design of multi-sugeno FLCs based on the whale optimization technique to enhance the FRT capability of grid connected PMSG based WECS in the event of unbalanced and balanced grid fault conditions. The whale optimization was used to design the rules of control and the Gaussian memberships of 8 sugeno FLCs, simultaneously, by reducing the high-dimensional multi-objective objective function. In [157], Amin et al. proposed a grasshopper optimization technique based PI controller for the improvement of transient stability performance of grid connected PMSG based WECS. The proposed method was used in the process of optimization, where the integration of square error criterion was considered as objective function. In [158], Amin et al. presented a novel transient search optimizer to optimally design the PI controllers that are used in generator-side and grid-side controllers for improving LVRT capability for grid connected PMSG-based WECS. The transient search optimizer was coded by using the Fortran language within the PSCAD software. The effectiveness of proposed method was compared with that accomplished by using a recent grey wolf optimization under various grid disturbances. In [159], Amin et al. proposed a new hybrid cuckoo search technique and grey wolf optimization-based on control method for improving the dynamic stability of grid connected PMSG-based WECS. The grid-side and generator-side converters were controlled by using an optimal PI controller for the extraction of maximum power from the PMSG at unity PF. In [160], Shutari et al. proposed a novel application of the sine cosine technique which aims to obtain the finest PI gains values leading to the extraction of maximum wind power and improving the WECS performance under random wind speed changes and severe grid disturbance. The proposed method was employed to minimize the sum of the integral squared error of 12 PI controllers error inputs in the control methods simultaneously.
8 Conclusion
This paper introduced a comprehensive review of grid-interfaced WECSs with main focus on electrical view. An overview of different topics concerning the WECS configurations, electrical generators and various power converter topologies are investigated. Furthermore, the international grid codes of frequency, power factor, power quality, harmonics and LVRT capability requirements were discussed. The major controller approaches for grid and generator converters such as MPPT, frequency controller, generator-side and grid-side converter controllers were analyzed. Additionally, the recent AI techniques which employed in the controllers of grid-connected WECSs were introduced.
Data Availability
Not applicable.
References
Ashraf H, Abdellatif SO, Elkholy MM, El-Fergany AA (2022) Computational techniques based on artificial intelligence for extracting optimal parameters of PEMFCs: survey and insights. Arch Comput Methods Eng. https://doi.org/10.1007/s11831-022-09721-y
IEA (2021) Global energy review 2021. IEA, Paris. Available https://www.iea.org/reports/global-energy-review-2021/renewables
Sang LQ, Li QA, Cai C, Maeda T, Kamada Y, Wang X et al (2021) Wind tunnel and numerical study of a floating offshore wind turbine based on the cyclic pitch control. Renew Energy 172:453–464. https://doi.org/10.1016/j.renene.2021.03.027
Yaramasu V, Wu B, Sen PC, Kouro S, Narimani M (2015) High-power wind energy conversion systems: state-of-the-art and emerging technologies. Proc IEEE 103:740–788. https://doi.org/10.1109/JPROC.2014.2378692
Khan MA, Javed A, Shakir S, Syed AH (2021) Optimization of a wind farm by coupled actuator disk and mesoscale models to mitigate neighboring wind farm wake interference from repowering perspective. Appl Energy 298:117229. https://doi.org/10.1016/j.apenergy.2021.117229
Venkata Y, Bin W (2017) Basics of wind energy conversion systems (Wecs). In: Model predictive control of wind energy conversion systems. pp 1–60. https://doi.org/10.1002/9781119082989.ch1
Ghanavati H, Kocewiak ŁH, Jalilian A, Gomis-Bellmunt O (2021) Transfer function-based analysis of harmonic and interharmonic current summation in type-III wind power plants using DFIG sequence impedance modeling. Electr Power Syst Res 199:107419. https://doi.org/10.1016/j.epsr.2021.107419
Jha D (2017) A comprehensive review on wind energy systems for electric power generation: current situation and improved technologies to realize future development. Int J Renew Energy Res 7:1786–1805. https://doi.org/10.20508/ijrer.v7i4.6264.g7219
Wu YK, Chang SM, Mandal P (2019) Grid-connected wind power plants: a survey on the integration requirements in modern grid codes. IEEE Trans Ind Appl 55:5584–5593. https://doi.org/10.1109/TIA.2019.2934081
Mahela OP, Shaik AG (2016) Comprehensive overview of grid interfaced wind energy generation systems. Renew Sustain Energy Rev 57:260–281. https://doi.org/10.1016/j.rser.2015.12.048
Tawfiq KB, Mansour AS, Ramadan HS, Becherif M, El-kholy EE (2019) Wind energy conversion system topologies and converters: comparative review. Energy Procedia 162:38–47. https://doi.org/10.1016/j.egypro.2019.04.005
Polinder H, Ferreira JA, Jensen BB, Abrahamsen AB, Atallah K, McMahon RA (2013) Trends in wind turbine generator systems. IEEE J Emerg Sel Top Power Electron 1:174–185. https://doi.org/10.1109/JESTPE.2013.2280428
Cheng M, Zhu Y (2014) The state of the art of wind energy conversion systems and technologies: a review. Energy Convers Manag 88:332–347. https://doi.org/10.1016/j.enconman.2014.08.037
Bhutto DK, Ansari JA, Bukhari SSH, Chachar FA (2019) Wind energy conversion systems (WECS) generators: a review. In: 2019 2nd international conference on computing, mathematics and engineering technologies (iCoMET). pp 1–6. https://doi.org/10.1109/ICOMET.2019.8673429
Chatterjee S, Chatterjee S (2018) Review on the techno-commercial aspects of wind energy conversion system. IET Renew Power Gener 12:1581–1608. https://doi.org/10.1049/iet-rpg.2018.5197
Kömürgöz G, Gündogdu T (2012) Comparison of salient pole and Permanent Magnet Synchronous Machines designed for wind turbines. In: 2012 IEEE power electronics and machines in wind applications. pp 1–5. https://doi.org/10.1109/PEMWA.2012.6316381
Chen H, Zuo Y, Chau KT, Zhao W, Lee CHT (2021) Modern electric machines and drives for wind power generation: a review of opportunities and challenges. IET Renew Power Gener 15:1864–1887. https://doi.org/10.1049/rpg2.12114
de Azevedo IA, Barros LS (2021) Comparison of control strategies for squirrel-cage induction generator-based wind energy conversion systems. In: 2021 14th IEEE international conference on industry applications (INDUSCON). pp 790–796. https://doi.org/10.1109/INDUSCON51756.2021.9529574
Chen WL, Huang CH (2021) Active power control of grid-tied squirrel-cage induction generators under subsynchronous mode. In: 2021 16th international conference on engineering of modern electric systems (EMES). pp 1–3. https://doi.org/10.1109/EMES52337.2021.9484136
Ahuja H, Singh A, Bhadoria VS, Singh S (2021) Performance assessment of distinct configurations for squirrel cage induction generator based wind energy conversion systems. In: AIP conference proceedings. p 040004. https://doi.org/10.1063/5.0043408
Beainy A, Maatouk C, Moubayed N, Kaddah F (2016) Comparison of different types of generator for wind energy conversion system topologies. In: 2016 3rd international conference on renewable energies for developing countries (REDEC). pp 1–6. https://doi.org/10.1109/REDEC.2016.7577535
Mishra V, Gupta P (2019) Wind energy generation system using wound rotor induction machine. In: 2019 innovations in power and advanced computing technologies (i-PACT). pp 1–7. https://doi.org/10.1109/i-PACT44901.2019.8960076
Kumar B, Sandhu KS, Sharma R (2022) Comparative analysis of control schemes for DFIG-based wind energy system. J Inst Eng (India) Ser B 103:649–668. https://doi.org/10.1007/s40031-021-00660-z
Thaghipour Boroujeni S (2020) Complex vector modeling of a doubly fed cascaded cage rotor induction machine. Electr Eng 102:1831–1842. https://doi.org/10.1007/s00202-020-00996-7
Mehrjardi RT, Ershad NF, Rahrovi B, Ehsani M (2021) A precise analytical model of the grid connected cascaded doubly fed induction machine. In: 2021 IEEE Texas power and energy conference (TPEC). pp 1–6. https://doi.org/10.1109/TPEC51183.2021.9384962
Ademi S, Jovanović MG, Hasan M (2015) Control of brushless doubly-fed reluctance generators for wind energy conversion systems. IEEE Trans Energy Convers 30:596–604. https://doi.org/10.1109/TEC.2014.2385472
Zhang D, Chen Y, Su J, Kang Y (2021) Dual-mode control for brushless doubly fed induction generation system based on control-winding-current orientation. IEEE J Emerg Sel Top Power Electron 9:1494–1506. https://doi.org/10.1109/JESTPE.2019.2960111
Zhang F, Jia G, Zhao Y, Yang Z, Cao W, Kirtley JL (2015) Simulation and experimental analysis of a brushless electrically excited synchronous machine with a hybrid rotor. IEEE Trans Magn 51:1–7. https://doi.org/10.1109/TMAG.2015.2450684
Bouras A, Bouras S, Eddine-Rouabhia C, Hernández-Callejo L, Eddine-Haouem N (2020) Experimental investigation of an alternative wind energy generator, particularly designed. Revista Facultad de Ingeniería Universidad de Antioquia. https://doi.org/10.17533/udea.redin.20200802
Zhang Y, Cheng Y, Fan X, Li D, Qu R (2021) Electromagnetic fault analysis of superconducting wind generator with different topologies. IEEE Trans Appl Supercond 31:1–6. https://doi.org/10.1109/TASC.2021.3070924
Zhou Y, Dong Q, Niu X-J, Xu H, Xiong Q, Su H et al (2021) A pole pair segment of oil-cooling air-core stator for a 2 MW direct-drive high temperature superconducting wind power generator. J Electr Eng Technol 16:3145–3155. https://doi.org/10.1007/s42835-021-00852-z
Xue S, Thomas AS, Zhu ZQ, Huang L, Duke A, Clark RE et al (2021) Stator optimization of wind power generators with high-temperature superconducting armature windings and permanent magnet rotor. IEEE Trans Appl Supercond 31:1–10. https://doi.org/10.1109/TASC.2020.3037057
Tlali PM, Wang RJ, Gerber S, Botha CD, Kamper MJ (2020) Design and performance comparison of Vernier and conventional PM synchronous wind generators. IEEE Trans Ind Appl 56:2570–2579. https://doi.org/10.1109/TIA.2020.2979111
Kim B (2019) Design method of a direct-drive permanent magnet Vernier generator for a wind turbine system. IEEE Trans Ind Appl 55:4665–4675. https://doi.org/10.1109/TIA.2019.2923717
Kim B (2018) Design of a direct drive permanent magnet Vernier generator for a wind turbine system. In: 2018 IEEE energy conversion congress and exposition (ECCE). pp 4275–4282. https://doi.org/10.1109/ECCE.2018.8557731
Labuschagne CJJ, Kamper MJ (2021) Permanent magnet Vernier generator design for a small-scale passive wind generator system. In: 2021 IEEE international electric machines & drives conference (IEMDC). pp 1–7. https://doi.org/10.1109/IEMDC47953.2021.9449547
Kana Padinharu DK, Li G-J, Zhu Z-Q, Clark R, Azar Z, Thomas A (2020) Investigation of scaling effect on power factor of permanent magnet Vernier machines for wind power application. IET Electr Power Appl 14:2136–2145. https://doi.org/10.1049/iet-epa.2020.0442
Prakht V, Dmitrievskii V, Kazakbaev V, Andriushchenko E (2021) Comparison of flux-switching and interior permanent magnet synchronous generators for direct-driven wind applications based on Nelder-Mead optimal designing. Mathematics. https://doi.org/10.3390/math9070732
Diab H, Amara Y, Barakat G (2020) Open circuit performance of axial air gap flux switching permanent magnet synchronous machine for wind energy conversion: modeling and experimental study. Energies. https://doi.org/10.3390/en13040912
Mirnikjoo SA, Abbaszadeh K, Abdollahi SE (2020) Design of an outer rotor flux switching permanent magnet generator for wind turbine. In: 2020 11th power electronics, drive systems, and technologies conference (PEDSTC). pp. 1–6. https://doi.org/10.1109/PEDSTC49159.2020.9088477
Jian L, Chau KT, Jiang JZ (2009) A magnetic-geared outer-rotor permanent-magnet brushless machine for wind power generation. IEEE Trans Ind Appl 45:954–962. https://doi.org/10.1109/TIA.2009.2018974
Li X, Chau K-T, Cheng M, Hua W (2013) Comparison of magnetic-geared permanent-magnet machines. Prog Electromagn Res 133:177–198. https://doi.org/10.2528/PIER12080808
Liu R, Yang E, Chen J, Niu S (2019) Novel bearing current suppression approach in doubly-fed induction generators. IEEE Access 7:171525–171532. https://doi.org/10.1109/ACCESS.2019.2955803
Mishra NK, Husain Z, Iqbal A (2020) Modeling and analysis of novel six-phase DFIG through asymmetrical winding structure for disperse generation. Int Trans Electr Energy Syst 30:e12649. https://doi.org/10.1002/2050-7038.12649
Sourabh S, Parida SK (2018) Design of a novel U shaped dual stator brushless doubly fed induction machine. In: 2018 IEEE international conference on power electronics, drives and energy systems (PEDES). pp 1–6. https://doi.org/10.1109/PEDES.2018.8707783
Zhang J, Jiang Y, Zhao J, Hua W (2019) An improved brushless doubly fed generator with interior PM rotor for wind power applications. IEEE Trans Magn 55:1–6. https://doi.org/10.1109/TMAG.2019.2902442
Zhang F, Wang H, Yu S, Ma D (2019) Rotor optimisation design and performance comparison of BDFG for wind power generation. IET Electr Power Appl 13:370–378. https://doi.org/10.1049/iet-epa.2018.5200
Zhang F, Song Y, Yu S, Jin S, Gerada C (2019) Influence of slot combination on performance of brushless doubly fed generator with hybrid rotor. IEEE Trans Magn 55:1–6. https://doi.org/10.1109/TMAG.2019.2932122
Cheng Y, Qu R, Li D, Chen C, Lin F (2019) A novel HTS wind generator having permanent magnets between the rotor pole-tips. IEEE Trans Appl Supercond 29:1–5. https://doi.org/10.1109/TASC.2019.2908581
Dong Y, Li X, Feng X (2021) Investigation of a novel radial partitioned stator HTS-excitation flux-switching machine. IEEE Trans Appl Supercond 31:1–5. https://doi.org/10.1109/TASC.2021.3063644
Kumar RR, Chetri C, Devi P, Saket RK, Blaabjerg F, Sanjeevikumar P et al (2020) Design and characteristic investigation of novel dual-stator V-shaped magnetic pole six-phase permanent magnet synchronous generator for wind power application. Electr Power Compon Syst 48:1537–1550. https://doi.org/10.1080/15325008.2020.1854388
Yang H, Qian C, Wang W, Lin H, Zhu ZQ, Niu S et al (2021) A novel asymmetric-magnetic-pole interior PM machine with magnet-axis-shifting effect. IEEE Trans Ind Appl 57:5927–5938. https://doi.org/10.1109/TIA.2021.3111153
Xiao Y, Zhu ZQ, Jewell GW, Chen J, Wu D, Gong L (2021) A novel spoke-type asymmetric rotor interior permanent magnet machine. IEEE Trans Ind Appl 57:4840–4851. https://doi.org/10.1109/TIA.2021.3099452
Jiang J, Zhang X, Niu S, Zhao X (2021) A novel doubly-fed doubly-salient machine with DC-saturation-relieving structure for wind power generation. IET Renew Power Gener 15:2042–2051. https://doi.org/10.1049/rpg2.12225
Zeinali R, Keysan O (2019) A rare-earth free magnetically geared generator for direct-drive wind turbines. Energies. https://doi.org/10.3390/en12030447
Allahyari A, Torkaman H (2020) A novel high-performance consequent pole dual rotor permanent magnet Vernier machine. IEEE Trans Energy Convers 35:1238–1246. https://doi.org/10.1109/TEC.2020.2980146
Jia S, Yan K, Liang D, Qu R, Liu J, He J (2021) A novel DC-biased current dual PM Vernier machine. IEEE Trans Ind Appl 57:4595–4605. https://doi.org/10.1109/TIA.2021.3084544
Siddiqi MR, Yazdan T, Im J-H, Humza M, Hur J (2021) Design and analysis of a dual airgap radial flux permanent magnet Vernier machine with yokeless rotor. Energies. https://doi.org/10.3390/en14082311
Chen C, Ren X, Li D, Qu R, Liu K, Zou T (2021) Torque performance enhancement of flux-switching permanent magnet machines with dual sets of magnet arrangements. IEEE Trans Transport Electrif 7:2623–2634. https://doi.org/10.1109/TTE.2021.3063426
Jiang W, Huang W, Lin X, Zhao Y, Wu X, Zhao Y et al (2022) A novel stator wound field flux switching machine with the combination of overlapping armature winding and asymmetric stator poles. IEEE Trans Ind Electron 69:2737–2748. https://doi.org/10.1109/TIE.2021.3063955
Yang H, Lin H, Zhu ZQ, Lyu S, Liu Y (2020) Design and analysis of novel asymmetric-stator-pole flux reversal PM machine. IEEE Trans Ind Electron 67:101–114. https://doi.org/10.1109/TIE.2019.2896097
Zhou K, Ge Y, Yang J (2020) Analysis and experimental verification of a novel field modulated permanent magnet gear machine. IET Electr Power Appl 14:1134–1140. https://doi.org/10.1049/iet-epa.2019.0858
Venkata Y, Bin W (2017) Review of generator‐converter configurations for WECS. In: Model predictive control of wind energy conversion systems. IEEE, pp 61–90. https://doi.org/10.1002/9781119082989.ch2
Blaabjerg F, Liserre M, Ma K (2012) Power electronics converters for wind turbine systems. IEEE Trans Ind Appl 48:708–719. https://doi.org/10.1109/TIA.2011.2181290
Hossam-Eldin AA, Negm E, Elgamal MS, AboRas KM (2020) Operation of grid-connected DFIG using SPWM- and THIPWM-based diode-clamped multilevel inverters. IET Gener Transm Distrib 14:1412–1419. https://doi.org/10.1049/iet-gtd.2019.0248
Zhu ZQ, Hu J (2013) Electrical machines and power-electronic systems for high-power wind energy generation applications. COMPEL 32:34–71. https://doi.org/10.1108/03321641311293740
Singh S, Kumar D (2021) Performance of type-4 direct driven PMSG based wind energy conversion system under nonlinear load demand. IOP Conf Ser Mater Sci Eng 1033:012009. https://doi.org/10.1088/1757-899x/1033/1/012009
Mahela OP, Gupta N, Khosravy M, Patel N (2019) Comprehensive overview of low voltage ride through methods of grid integrated wind generator. IEEE Access 7:99299–99326. https://doi.org/10.1109/ACCESS.2019.2930413
Howlader AM, Senjyu T (2016) A comprehensive review of low voltage ride through capability strategies for the wind energy conversion systems. Renew Sustain Energy Rev 56:643–658. https://doi.org/10.1016/j.rser.2015.11.073
Gholizadeh M, Tohidi S, Oraee A, Oraee H (2018) Appropriate crowbar protection for improvement of brushless DFIG LVRT during asymmetrical voltage dips. Int J Electr Power Energy Syst 95:1–10. https://doi.org/10.1016/j.ijepes.2017.07.018
Naderi SB, Negnevitsky M, Muttaqi KM, (2017) A modified DC chopper for limiting the fault current and controlling the DC link voltage to enhance ride-through capability of doubly-fed induction generator based wind turbine. In: 2017 IEEE industry applications society annual meeting. pp 1–8. https://doi.org/10.1109/IAS.2017.8101743
Amalorpavaraj RAJ, Kaliannan P, Padmanaban S, Subramaniam U, Ramachandaramurthy VK (2017) Improved fault ride through capability in DFIG based wind turbines using dynamic voltage restorer with combined feed-forward and feed-back control. IEEE Access 5:20494–20503. https://doi.org/10.1109/ACCESS.2017.2750738
Ibrahim RA, Hamad MS, Dessouky YG, Williams BW (2012) A review on recent low voltage ride-through solutions for PMSG wind turbine. In: International symposium on power electronics power electronics, electrical drives, automation and motion. pp 265–270. https://doi.org/10.1109/SPEEDAM.2012.6264594
Nguyen TH, Lee D-C (2010) Ride-through technique for PMSG wind turbines using energy storage systems. J Power Electron 10:733–738. https://doi.org/10.6113/JPE.2010.10.6.733
Priyavarthini S, Nagamani C, Ilango GS, Rani MAA (2018) An improved control for simultaneous sag/swell mitigation and reactive power support in a grid-connected wind farm with DVR. Int J Electr Power Energy Syst 101:38–49. https://doi.org/10.1016/j.ijepes.2018.03.016
Yan L, Chen X, Zhou X, Sun H, Jiang L (2018) Perturbation compensation-based non-linear adaptive control of ESS-DVR for the LVRT capability improvement of wind farms. IET Renew Power Gener 12:1500–1507. https://doi.org/10.1049/iet-rpg.2017.0839
Tilli A, Conficoni C, Hashemi A (2019) An effective control solution for doubly-fed induction generator under harsh balanced and unbalanced voltage sags. Control Eng Pract 84:172–182. https://doi.org/10.1016/j.conengprac.2018.11.014
Tripathi SM, Tiwari AN, Singh D (2019) Low-voltage ride-through enhancement with the ω and T controls of PMSG in a grid-integrated wind generation system. IET Gener Transm Distrib 13:1979–1988. https://doi.org/10.1049/iet-gtd.2018.6275
Hossam-Eldin AA, Negm Abdallah E, Elgamal MS, AboRas KM (2020) Fault ride-through of grid-connected THIPWM fired DCMLI-based DFIG using parallel switched feedback-controlled DVR. IET Gener Transm Distrib 14:945–954. https://doi.org/10.1049/iet-gtd.2019.0215
Mosaad MI, Alenany A, Abu-Siada A (2020) Enhancing the performance of wind energy conversion systems using unified power flow controller. IET Gener Transm Distrib 14:1922–1929. https://doi.org/10.1049/iet-gtd.2019.1112
Asghar R, Rehman F, Ullah Z, Aman A, Iqbal K, Ali Nawaz A (2020) Modified switch type fault current limiter for low-voltage ride-through enhancement and reactive power support of DFIG-WT under grid faults. IET Renew Power Gener 14:1481–1490. https://doi.org/10.1049/iet-rpg.2019.1058
Ali MAS, Mehmood KK, Baloch S, Kim C-H (2020) Modified rotor-side converter control design for improving the LVRT capability of a DFIG-based WECS. Electr Power Syst Res 186:106403. https://doi.org/10.1016/j.epsr.2020.106403
El-Naggar MF, Mosaad MI, Hasanien HM, AbdulFattah TA, Bendary AF (2021) Elephant herding algorithm-based optimal PI controller for LVRT enhancement of wind energy conversion systems. Ain Shams Eng J 12:599–608. https://doi.org/10.1016/j.asej.2020.07.013
Raghavendran CR, Roselyn JP, Sowmmiya U, Devaraj D (2021) Effective power transfer and reduced-order generalized integrator sequence based fault ride through strategy in grid connected DFIG based WECS. Int J Electr Power Energy Syst 130:106809. https://doi.org/10.1016/j.ijepes.2021.106809
Senapati MK, Pradhan C, Nayak PK, Padmanaban S, Gjengedal T (2020) Modified demagnetisation control strategy for low-voltage ride-through enhancement in DFIG-based wind systems. IET Renew Power Gener 14:3487–3499. https://doi.org/10.1049/iet-rpg.2019.1128
Nasiri M, Arzani A (2022) Robust control scheme for the braking chopper of PMSG-based wind turbines—a comparative assessment. Int J Electr Power Energy Syst 134:107322. https://doi.org/10.1016/j.ijepes.2021.107322
Manohar G, Venkateshwarlu S, Jaya Laxmi A (2021) A DFIG-based wind energy conversion system (WECS) for LVRT enhancement using a hybrid approach: an efficient MEHRFA technique. Soft Comput 25:2559–2574. https://doi.org/10.1007/s00500-020-05276-x
Du KJ, Ma XP, Zheng ZX, Li CS, Hu WX, Dong KS (2021) LVRT capability improvement of DFIG-based wind turbines with a modified bridge-resistive-type SFCL. IEEE Trans Appl Supercond 31:1–5. https://doi.org/10.1109/TASC.2021.3091114
Jain B, Jain S, Nema RK (2015) Control strategies of grid interfaced wind energy conversion system: an overview. Renew Sustain Energy Rev 47:983–996. https://doi.org/10.1016/j.rser.2015.03.063
Mohammadi J, Vaez-Zadeh S, Ebrahimzadeh E, Blaabjerg F (2018) Combined control method for grid-side converter of doubly fed induction generator-based wind energy conversion systems. IET Renew Power Gener 12:943–952. https://doi.org/10.1049/iet-rpg.2017.0539
Cardenas R, Pena R, Alepuz S, Asher G (2013) Overview of control systems for the operation of DFIGs in wind energy applications. IEEE Trans Ind Electron 60:2776–2798. https://doi.org/10.1109/TIE.2013.2243372
Giannakis A, Karlis A, Karnavas YL (2018) A combined control strategy of a DFIG based on a sensorless power control through modified phase-locked loop and fuzzy logic controllers. Renew Energy 121:489–501. https://doi.org/10.1016/j.renene.2018.01.052
Debouza M, Al-Durra A, Errouissi R, Muyeen SM (2018) Direct power control for grid-connected doubly fed induction generator using disturbance observer based control. Renew Energy 125:365–372. https://doi.org/10.1016/j.renene.2018.02.121
Xiong L, Wang J, Mi X, Khan MW (2018) Fractional order sliding mode based direct power control of grid-connected DFIG. IEEE Trans Power Syst 33:3087–3096. https://doi.org/10.1109/TPWRS.2017.2761815
Harrabi N, Souissi M, Aitouche A, Chaabane M (2018) Intelligent control of grid-connected AC–DC–AC converters for a WECS based on T-S fuzzy interconnected systems modelling. IET Power Electron 11:1507–1518. https://doi.org/10.1049/iet-pel.2017.0174
Merabet A, Eshaft H, Tanvir AA (2018) Power-current controller based sliding mode control for DFIG-wind energy conversion system. IET Renew Power Gener 12:1155–1163. https://doi.org/10.1049/iet-rpg.2017.0313
Soliman MA, Hasanien HM, Azazi HZ, El-kholy EE, Mahmoud SA (2018) Hybrid ANFIS-GA-based control scheme for performance enhancement of a grid-connected wind generator. IET Renew Power Gener 12:832–843. https://doi.org/10.1049/iet-rpg.2017.0576
Morshed MJ, Fekih A (2019) A sliding mode approach to enhance the power quality of wind turbines under unbalanced voltage conditions. IEEE/CAA J Autom Sin 6:566–574. https://doi.org/10.1109/JAS.2019.1911414
Mbukani MWK, Gule N (2019) Comparison of high-order and second-order sliding mode observer based estimators for speed sensorless control of rotor-tied DFIG systems. IET Power Electron 12:3231–3241. https://doi.org/10.1049/iet-pel.2018.6225
Djilali L, Sanchez EN, Belkheiri M (2019) Real-time neural sliding mode field oriented control for a DFIG-based wind turbine under balanced and unbalanced grid conditions. IET Renew Power Gener 13:618–632. https://doi.org/10.1049/iet-rpg.2018.5002
Abo-Khalil AG, Alghamdi A, Tlili I, Eltamaly AM (2019) Current controller design for DFIG-based wind turbines using state feedback control. IET Renew Power Gener 13:1938–1948. https://doi.org/10.1049/iet-rpg.2018.6030
Moradi H, Alinejad-Beromi Y, Yaghobi H, Bustan D (2019) Sliding mode type-2 neuro-fuzzy power control of grid-connected DFIG for wind energy conversion system. IET Renew Power Gener 13:2435–2442. https://doi.org/10.1049/iet-rpg.2019.0066
Rocha-Osorio CM, Solís-Chaves JS, Rodrigues LL, Puma JLA, Sguarezi Filho AJ (2019) Deadbeat–fuzzy controller for the power control of a doubly fed induction generator based wind power system. ISA Trans 88:258–267. https://doi.org/10.1016/j.isatra.2018.11.038
Amin IK, Uddin MN (2020) Nonlinear control operation of DFIG-based WECS incorporated with machine loss reduction scheme. IEEE Trans Power Electron 35:7031–7044. https://doi.org/10.1109/TPEL.2019.2955021
Xiong L, Li P, Ma M, Wang Z, Wang J (2020) Output power quality enhancement of PMSG with fractional order sliding mode control. Int J Electr Power Energy Syst 115:105402. https://doi.org/10.1016/j.ijepes.2019.105402
Samanes J, Gubia E, Lopez J, Burgos R (2020) Sub-synchronous resonance damping control strategy for DFIG wind turbines. IEEE Access 8:223359–223372. https://doi.org/10.1109/ACCESS.2020.3043818
Huang S, Wang J, Huang C, Zhou L, Xiong L, Liu J et al (2022) A fixed-time fractional-order sliding mode control strategy for power quality enhancement of PMSG wind turbine. Int J Electr Power Energy Syst 134:107354. https://doi.org/10.1016/j.ijepes.2021.107354
Patel R, Hafiz F, Swain A, Ukil A (2021) Nonlinear rotor side converter control of DFIG based wind energy system. Electr Power Syst Res 198:107358. https://doi.org/10.1016/j.epsr.2021.107358
Sami I, Ullah S, Ullah N, Ro J-S (2021) Sensorless fractional order composite sliding mode control design for wind generation system. ISA Trans 111:275–289. https://doi.org/10.1016/j.isatra.2020.11.001
Noussi K, Abouloifa A, Giri F, Katir H, Lachkar I, Aourir M et al (2021) Adaptive multi-objective sliding mode control of a wind energy conversion system involving doubly fed induction generator for power capture optimization. J Control Autom Electr Syst 32:1663–1677. https://doi.org/10.1007/s40313-021-00797-8
Bossoufi B, Karim M, Taoussi M, Aroussi HA, Bouderbala M, Deblecker O et al (2021) Rooted tree optimization for the backstepping power control of a doubly fed induction generator wind turbine: dSPACE implementation. IEEE Access 9:26512–26522. https://doi.org/10.1109/ACCESS.2021.3057123
Kumar D, Chatterjee K (2016) A review of conventional and advanced MPPT algorithms for wind energy systems. Renew Sustain Energy Rev 55:957–970. https://doi.org/10.1016/j.rser.2015.11.013
Hemanth Kumar MB, Saravanan B, Sanjeevikumar P, Blaabjerg F (2018) Review on control techniques and methodologies for maximum power extraction from wind energy systems. IET Renew Power Gener 12:1609–1622. https://doi.org/10.1049/iet-rpg.2018.5206
Mousa HHH, Youssef A-R, Mohamed EEM (2021) State of the art perturb and observe MPPT algorithms based wind energy conversion systems: a technology review. Int J Electr Power Energy Syst 126:106598. https://doi.org/10.1016/j.ijepes.2020.106598
Yin M, Li W, Chung CY, Zhou L, Chen Z, Zou Y (2017) Optimal torque control based on effective tracking range for maximum power point tracking of wind turbines under varying wind conditions. IET Renew Power Gener 11:501–510. https://doi.org/10.1049/iet-rpg.2016.0635
Dida A, Attous DB (2017) Adaptive hill-climb searching method for MPPT algorithm based DFIG system using fuzzy logic controller. Int J Syst Assur Eng Manag 8:424–434. https://doi.org/10.1007/s13198-015-0392-0
Mousa HHH, Youssef A-R, Mohamed EEM (2020) Hybrid and adaptive sectors P&O MPPT algorithm based wind generation system. Renew Energy 145:1412–1429. https://doi.org/10.1016/j.renene.2019.06.078
Hussain J, Mishra MK (2016) Adaptive maximum power point tracking control algorithm for wind energy conversion systems. IEEE Trans Energy Convers 31:697–705. https://doi.org/10.1109/TEC.2016.2520460
Yang B, Yu T, Shu H, Zhang Y, Chen J, Sang Y et al (2018) Passivity-based sliding-mode control design for optimal power extraction of a PMSG based variable speed wind turbine. Renew Energy 119:577–589. https://doi.org/10.1016/j.renene.2017.12.047
Zhang X, Zhang Y, Hao S, Wu L, Wei W (2019) An improved maximum power point tracking method based on decreasing torque gain for large scale wind turbines at low wind sites. Electr Power Syst Res 176:105942. https://doi.org/10.1016/j.epsr.2019.105942
Chen J, Yao W, Zhang C-K, Ren Y, Jiang L (2019) Design of robust MPPT controller for grid-connected PMSG-based wind turbine via perturbation observation based nonlinear adaptive control. Renew Energy 134:478–495. https://doi.org/10.1016/j.renene.2018.11.048
Chen P, Han D, Li KC (2020) Robust adaptive control of maximum power point tracking for wind power system. IEEE Access 8:214538–214550. https://doi.org/10.1109/ACCESS.2020.3039048
Youssef A-R, Mousa HHH, Mohamed EEM (2020) Development of self-adaptive P&O MPPT algorithm for wind generation systems with concentrated search area. Renew Energy 154:875–893. https://doi.org/10.1016/j.renene.2020.03.050
González-Hernández JG, Salas-Cabrera R, Vázquez-Bautista R, Ong-de-la-Cruz LM, Rodríguez-Guillén J (2021) A novel MPPT PI discrete reverse-acting controller for a wind energy conversion system. Renew Energy 178:904–915. https://doi.org/10.1016/j.renene.2021.06.106
Wang J, Bo D (2022) Adaptive fixed-time sensorless maximum power point tracking control scheme for DFIG wind energy conversion system. Int J Electr Power Energy Syst 135:107424. https://doi.org/10.1016/j.ijepes.2021.107424
Buduma P, Vulisi NK, Panda G (2021) Robust control and Kalman MPPT for grid-assimilated wind energy conversion system. IEEE Trans Ind Appl 57:1274–1284. https://doi.org/10.1109/TIA.2020.3047585
Wu Z, Gao W, Gao T, Yan W, Zhang H, Yan S et al (2018) State-of-the-art review on frequency response of wind power plants in power systems. J Mod Power Syst Clean Energy 6:1–16. https://doi.org/10.1007/s40565-017-0315-y
Yingcheng X, Nengling T (2011) Review of contribution to frequency control through variable speed wind turbine. Renew Energy 36:1671–1677. https://doi.org/10.1016/j.renene.2010.11.009
Lin CH, Wu YK (2021) Overview of frequency-control technologies for a VSC-HVDC-integrated wind farm. IEEE Access 9:112893–112921. https://doi.org/10.1109/ACCESS.2021.3102829
Debouza M, Al-Durra A (2019) Grid ancillary services from doubly fed induction generator-based wind energy conversion system: a review. IEEE Access 7:7067–7081. https://doi.org/10.1109/ACCESS.2018.2890168
Zhang X, Zha X, Yue S, Chen Y (2018) A frequency regulation strategy for wind power based on limited over-speed de-loading curve partitioning. IEEE Access 6:22938–22951. https://doi.org/10.1109/ACCESS.2018.2825363
Peng B, Zhang F, Liang J, Ding L, Liang Z, Wu Q (2019) Coordinated control strategy for the short-term frequency response of a DFIG-ES system based on wind speed zone classification and fuzzy logic control. Int J Electr Power Energy Syst 107:363–378. https://doi.org/10.1016/j.ijepes.2018.11.010
Hu YL, Wu YK (2019) Approximation to frequency control capability of a DFIG-based wind farm using a simple linear gain droop control. IEEE Trans Ind Appl 55:2300–2309. https://doi.org/10.1109/TIA.2018.2886993
Li P, Hu W, Hu R, Huang Q, Yao J, Chen Z (2019) Strategy for wind power plant contribution to frequency control under variable wind speed. Renew Energy 130:1226–1236. https://doi.org/10.1016/j.renene.2017.12.046
Verij Kazemi M, Sadati SJ, Gholamian SA (2020) Adaptive frequency control support of a DFIG based on second-order derivative controller using data-driven method. Int Trans Electr Energy Syst 30:e12424. https://doi.org/10.1002/2050-7038.12424
Xu Y, Chen P, Zhang X, Yang D (2021) An improved droop control scheme of a doubly-fed induction generator for various disturbances. Energies. https://doi.org/10.3390/en14237980
Yang D, Zheng T, Jin E, Zhang X, Hua L (2021) Frequency control scheme with dynamic droop characteristics of a DFIG for mitigating the frequency fluctuations. Int Trans Electr Energy Syst 31:e13044. https://doi.org/10.1002/2050-7038.13044
Chen P, Qi C, Chen X (2021) Virtual inertia estimation method of DFIG-based wind farm with additional frequency control. J Mod Power Syst Clean Energy 9:1076–1087. https://doi.org/10.35833/MPCE.2020.000908
Yang D, Jin Z, Zheng T, Jin E (2022) An adaptive droop control strategy with smooth rotor speed recovery capability for type III wind turbine generators. Int J Electr Power Energy Syst 135:107532. https://doi.org/10.1016/j.ijepes.2021.107532
Behera S, Sahoo S, Pati BB (2015) A review on optimization algorithms and application to wind energy integration to grid. Renew Sustain Energy Rev 48:214–227. https://doi.org/10.1016/j.rser.2015.03.066
Marugán AP, Márquez FPG, Perez JMP, Ruiz-Hernández D (2018) A survey of artificial neural network in wind energy systems. Appl Energy 228:1822–1836. https://doi.org/10.1016/j.apenergy.2018.07.084
Karad S, Thakur R (2021) Recent trends of control strategies for doubly fed induction generator based wind turbine systems: a comparative review. Arch Comput Methods Eng 28:15–29. https://doi.org/10.1007/s11831-019-09367-3
Elkholy MM, Metwally HMB, Regal GM, Sadek MA (2016) Efficient operation of wind turbine with doubly fed induction generator using TLBO algorithm and artificial neural networks. Int Rev Model Simul 9:464. https://doi.org/10.15866/iremos.v9i6.10309
Elkholy MM, Metwally HMB, Regal GM, Sadek MA (2017) Optimal active and reactive power control of wind turbine driven DFIG using TLBO algorithm and artificial neural networks. Int J Renew Energy Technol 8:132–153. https://doi.org/10.1504/IJRET.2017.086810
Yang B, Zhang X, Yu T, Shu H, Fang Z (2017) Grouped grey wolf optimizer for maximum power point tracking of doubly-fed induction generator based wind turbine. Energy Convers Manag 133:427–443. https://doi.org/10.1016/j.enconman.2016.10.062
Madan CJ, Kumar N (2019) Fuzzy grey wolf optimization for controlled low-voltage ride-through conditions in grid-connected wind turbine with doubly fed induction generator. Simulation 95:327–338. https://doi.org/10.1177/0037549718777607
Bakir H, Merabet A, Dhar RK, Kulaksiz AA (2020) Bacteria foraging optimisation algorithm based optimal control for doubly-fed induction generator wind energy system. IET Renew Power Gener 14:1850–1859. https://doi.org/10.1049/iet-rpg.2020.0172
Alhato MM, Ibrahim MN, Rezk H, Bouallègue S (2021) An enhanced DC-link voltage response for wind-driven doubly fed induction generator using adaptive fuzzy extended state observer and sliding mode control. Mathematics. https://doi.org/10.3390/math9090963
Memon A, Mustafa MWB, Jumani TA, Olatunji Obalowu M, Malik N-u-R (2021) Salp swarm algorithm–based optimal vector control scheme for dynamic response enhancement of brushless double-fed induction generator in a wind energy conversion system. Int Trans Electr Energy Syst 31:e13157. https://doi.org/10.1002/2050-7038.13157
Nasef SA, Hassan AA, Elsayed HT, Zahran MB, El-Shaer MK, Abdelaziz AY (2022) Optimal tuning of a new multi-input multi-output fuzzy controller for doubly fed induction generator-based wind energy conversion system. Arab J Sci Eng 47:3001–3021. https://doi.org/10.1007/s13369-021-05946-4
Aguilar MEB, Coury DV, Machado FR, Reginatto R (2021) Tuning of DFIG wind turbine controllers with voltage regulation subjected to electrical faults using a PSO algorithm. J Control Autom Electr Syst 32:1417–1428. https://doi.org/10.1007/s40313-021-00779-w
Bakir H, Merabet A, Dhar RK, Kulaksiz AA (2021) Experimental evaluation of water cycle technique for control parameters optimization of double-fed induction generator-based wind turbine. Eng Sci Technol Int J 24:890–898. https://doi.org/10.1016/j.jestch.2020.12.024
Han K, Huang T, Yin L (2021) Quantum parallel multi-layer Monte Carlo optimization algorithm for controller parameters optimization of doubly-fed induction generator-based wind turbines. Appl Soft Comput 112:107813. https://doi.org/10.1016/j.asoc.2021.107813
Yang B, Yu T, Shu H, Zhang X, Qu K, Jiang L (2018) Democratic joint operations algorithm for optimal power extraction of PMSG based wind energy conversion system. Energy Convers Manag 159:312–326. https://doi.org/10.1016/j.enconman.2017.12.090
Qais MH, Hasanien HM, Alghuwainem S (2018) A grey wolf optimizer for optimum parameters of multiple PI controllers of a grid-connected PMSG driven by variable speed wind turbine. IEEE Access 6:44120–44128. https://doi.org/10.1109/ACCESS.2018.2864303
Qais MH, Hasanien HM, Alghuwainem S (2020) Whale optimization algorithm-based Sugeno fuzzy logic controller for fault ride-through improvement of grid-connected variable speed wind generators. Eng Appl Artif Intell 87:103328. https://doi.org/10.1016/j.engappai.2019.103328
Amin MN, Soliman MA, Hasanien HM, Abdelaziz AY (2020) Grasshopper optimization algorithm-based PI controller scheme for performance enhancement of a grid-connected wind generator. J Control Autom Electr Syst 31:393–401. https://doi.org/10.1007/s40313-020-00569-w
Qais MH, Hasanien HM, Alghuwainem S (2020) Optimal transient search algorithm-based PI controllers for enhancing low voltage ride-through ability of grid-linked PMSG-based wind turbine. Electronics. https://doi.org/10.3390/electronics9111807
Amin MN, Soliman MA, Hasanien HM, Abdelaziz AY (2021) Hybrid CSA-GWO algorithm-based optimal control strategy for efficient operation of variable-speed wind generators. In: Eltamaly AM, Abdelaziz AY, Abo-Khalil AG (eds) Control and operation of grid-connected wind energy systems. Springer, Cham, pp 227–245. https://doi.org/10.1007/978-3-030-64336-2_9
Shutari H, Saad N, Nor NBM, Tajuddin MFN, Alqushaibi A, Magzoub MA (2021) Towards enhancing the performance of grid-tied VSWT via adopting sine cosine algorithm-based optimal control scheme. IEEE Access 9:139074–139088. https://doi.org/10.1109/ACCESS.2021.3119019
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Research Involving Human and/or Animal Participants
The study did not involve humans or animals.
Informed Consent
The study did not involve humans.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Abdelateef Mostafa, M., El-Hay, E.A. & ELkholy, M.M. Recent Trends in Wind Energy Conversion System with Grid Integration Based on Soft Computing Methods: Comprehensive Review, Comparisons and Insights. Arch Computat Methods Eng 30, 1439–1478 (2023). https://doi.org/10.1007/s11831-022-09842-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11831-022-09842-4