
Abstract
da Vinci robotic surgery is becoming a standard alternative to open and laparoscopic surgical techniques. Robotic partial nephrectomy has been described in limited numbers. In this article, a surgical atlas of the transperitoneal four-arm approach to robotic partial nephrectomy is outlined. Surgical pearls, pitfalls, and limitations are reviewed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Patients with renal neoplasia face several treatment options. Radical nephrectomy, partial nephrectomy, and ablative modalities are well described [1, 2]. The open, laparoscopic, and percutaneous approaches are prevalent techniques [1, 2]. Robotic partial nephrectomy is in a fledgling state, but the complexity and reconstructive nature of laparoscopic partial nephrectomy may theoretically be well suited to a robotic assisted approach. There have been a few reports of the procedure, with differing techniques [3–5].
As evidenced with robotic prostatectomy, there are several advantages of da Vinci® assisted laparoscopic surgery [6]. The robotic approach subjectively allows better visualization, improved control via multiple effector arms, and reduced surgeon fatigue. Ergonomics are superior secondary to relaxed surgeon positioning, and tremors are reduced. Articulation is enhanced, which may aid in complex reconstructive procedures.
The goal of this publication is to describe one method to perform a da Vinci four-arm approach to partial nephrectomy using a parallelogram port placement. This approach has been validated in tumors in all locations except directly posterior midpole lesions. The subsequent surgical atlas will include clinical pearls for successful robotic partial nephrectomy.
Methods
Robotic partial nephrectomy will be outlined in several steps, with a similar format as a recently published communication regarding robotic prostatectomy [6]. For the purposes of this article, the instruments in the working arms may be interchanged depending on whether or the surgeon is right or left handed.
-
Step 1: Trocar placement with parallelogram arrangement and docking (Fig. 1).
Fig. 1 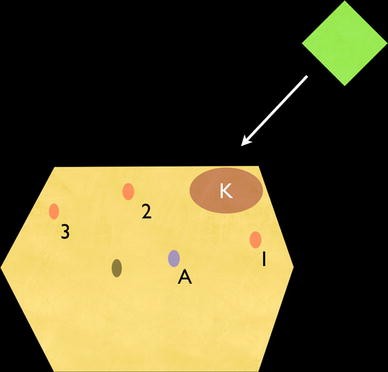
Four-arm approach to da Vinci partial nephrectomy. 1 Cephalad arm. 2 Lateral arm. 3 Caudal arm = fourth arm. A Camera port. Assistant port is not visualized, but is usually placed between the camera port and the cephalad arm. Umbilicus is visualized

Instruments:
-
Three robotic trocars with cannulae.
-
Two 12 mm disposable trocars (camera and assistant).
-
Handheld electrocautery (35 W).
-
Insufflation needle.
Extensive ex vivo work was performed to create a trocar arrangement that could be used in most renal tumors. Several challenges were present, especially since the kidney is many times larger than the prostate, and thus, a larger range of motion is necessary. The trocar arrangement was optimized for hilar dissection and retraction, with the acceptance of some minor collisions in the extreme upper and lower parts of the surgical field. The robot is arranged by the OR staff assistant. The camera and the cephalad arm are always paired on one side of the robot (with the joint on the camera arm towards the cephalad arm), and the caudal and fourth arms are paired on the other side of the robot.
The patient is placed in the flank position and all pressure points are padded. An axillary roll is used, and the table is flexed. Insufflation is performed and then the camera port is placed. After the abdomen is inspected, the remaining robotic trocars are placed, as seen in Fig. 1. The trocars are placed 8–12 cm apart depending on the size of the patient’s torso. The assistant’s trocar is placed in between the camera and the cephalad port. For the purposes of this article, the ports will be referred to as cephalad (CE), lateral (LA), caudal (CA), assistant (AS), and camera (CAM). In this communication the CE and LA arms are classified as the working arms. The caudal port is attached to the fourth arm. In older three-arm da Vinci systems, the assistant could place a second trocar in lieu of the fourth arm.
Docking is performed diagonally so that the center of the robot is in a line with the camera port and the renal hilum (usually off the tip of the 11th rib). Prior to docking, the anesthesia monitors and poles must be moved cephalad. The robot’s position may be tested prior to the patient arriving in the room to ensure that the arms do not become contaminated by collisions with anesthesia monitors or overhead lights.
After insufflation and port placement, the robot is docked, and the primary surgeon engages the console. The surgeon should ensure that the console is set for 30° downward visualization. Additionally, all cautery cords should be attached to the robotic instruments. The author prefers to attach insufflation tubing to the assistant’s trocar. For obese patients, all ports should be shifted laterally.
-
Step 2: Reflection of the colon (Fig. 2).
Fig. 2 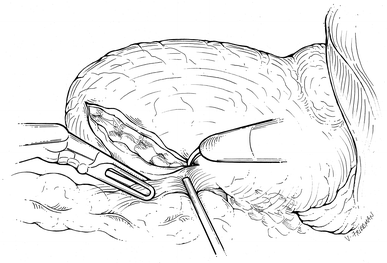
Colon is reflected over the anterior surface of the kidney

Instruments:
-
Working arms (CE and LA): monopolar scissor (35 W) and prograsp (alternative: bipolar or plasmakinetic forceps).
-
Caudal arm (CA): dual-blade atrial retractor.
-
Assistant: suction/irrigator.
-
Scope: 30° downward orientation.
Reflection of the colon is a critical step, as it confers exposure for the remainder of the operation. When beginning ones experience with robotic renal surgery, the surgeon should reflect the colon as much as possible to allow wide access to the retroperitoneum. However, with experience, the surgeon may choose to reflect the colon in a more limited fashion. The peritoneum should be incised and the colon reflected medially until Gerota’s fascia is visible along the medial length of the kidney. Note that the left colon lies quite laterally in comparison to the right colon, and more mobilization may be needed on the left. Under robotic visualization, the surgeon may see that the perinephric fat and Gerota’s fascia often possess a paler yellow color than the mesenteric fat. The proper plane between the peritoneum and retroperitoneum is often avascular, so the colo-renal attachments may be swept downwards or cut with an athermal technique when the plane is reached.
The colon should also be reflected below the lower pole of the kidney inferiorly. The cephalad extent of the dissection should occur up to the liver edge or splenic edge and then laterally along the edge of the spleen or liver. The mesenteric fat and the colo-renal attachments can be retracted by the assistant or with the fourth arm. The surgeon can easily provide countertraction with the prograsp, and the dual-blade retractor may be used to push the colon medially. On the right, the ureter and vena cava are commonly identified. On the left, the ureter and the gonadal vein may be identified, but the aorta is often not directly seen, since it is surrounded by more adherent lymphatics and fat. Caution is advised near the iliac vessels and appendix when incising the peritoneum near the pelvis; one usually does not need to dissect so caudally. Caution is also advised on dissecting too medially on the right side and hitting the duodenum. On the left, it is critical to avoid the pancreas by performing the dissection directly on the perinephric fat.
-
Step 3: Lateral retraction of the lower pole of the kidney to put hilum on stretch (Fig. 3).
Fig. 3 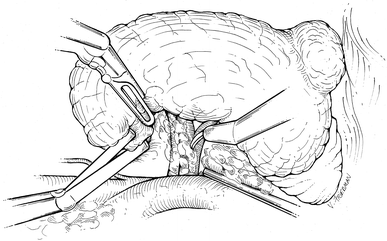
The kidney is retracted laterally to allow exposure and dissection of the renal hilum

Instruments:
-
Working arms (CE and LA): monopolar scissor and prograsp.
-
Fourth arm (CA): dual-blade retractor.
-
Assistant: suction/irrigator.
Lateral retraction of the kidney, originally popularized by Kavoussi laparoscopically, suspends the kidney to allow the renal hilum to be on stretch. Open surgeons who perform flank incisions also lateralize the kidney when they lift the kidney up from the psoas muscle during dissection. An analogous maneuver may be employed with robotic partial nephrectomy.
After reflection of the colon and identification of the ureter, the psoas muscle is identified medial to the ureter. Once a glimpse of the psoas muscle is identified, it is exploited with upward retraction of the kidney and perinephric fat. The dual-blade atrial retractor is the ideal instrument to cradle the kidney from its medial surface. The retractor is placed under the lower pole of the kidney and is used to elevate the kidney away from the great vessels. As such, the renal hilum is stretched and working space is created between the kidney and the great vessels. Any remaining colo-renal attachments will be visualized as they will also be placed on stretch and they can be taken down sharply. Once the hilum is on stretch, there are several maneuvers to find the renal vein: one may trace the gonadal vein to the cava and then trace the cava to the renal vein (or, on the left, trace the gonadal vein directly to the renal vein). With experience this tracing becomes unnecessary, and one may actually visualize the large biphasic venous pulsation. The console surgeon may use the scissors to gently push the fat off the anterior surface of the renal vein to gain exposure. Once the renal vein is identified, the artery is then dissected with the help of the assistant who can retract the vein cranially and caudally. The artery is generally harder to identify than the vein; however it is unnecessary to totally clean off the periarterial fat and lymphatics.
On the left side it may be difficult to identify the artery posterior to the renal vein, usually because the left gonadal vein obscures the underlying arterial vessel. To gain mobility around the renal vein, the surgeon may staple or clip the gonadal vein near the renal vein. On the right side, the artery is often easier to identify since the right renal vein is rarely tethered by other branches.
-
Step 4: Dissection of kidney off of the adrenal gland (Fig. 4).
Fig. 4 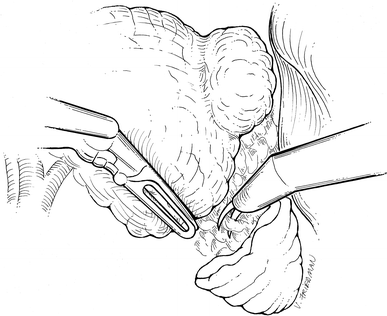
The upper pole is mobilized from the adrenal attachments

-
Working arms (CE and LA): monopolar scissor and prograsp.
-
Fourth arm (CA): dual-blade retractor or robotic clip applier.
-
Assistant: suction/irrigator.
Dissection of the kidney’s upper pole from the adrenal gland is useful for tumors in the upper part of the kidney, in which the adrenal resection is not anticipated. This step may be unnecessary in lower or midpole tumors. Often, there are significant unnamed blood vessels traveling in between the adrenal and the kidney. Rarely, an upper pole arterial branch will be encountered.
The adrenal gland is identified by its rich yellow appearance inside Gerota’s fascia. The area between the kidney parenchyma and adrenal gland can be divided with careful use of monopolar cautery. The assistant can thin out the fat with blunt dissection and strands are divided by the console surgeon. Clips may be required for larger venous branches. The prograsp is useful to give countertraction to the assistant’s suction device to allow dissection of the area. The fourth arm (CA) with the dual-blade retractor should be repositioned on the anterior surface of the kidney to retract the whole kidney caudally. Alternatively, the dual-blade retractor could be exchanged for a robotic clip applier.
If the upper pole renal tumor is very large, then the surgeon may elect to resect the adrenal gland en bloc with the mass. Thus, the surgeon will be dissecting along the lateral border of the vena cava or aorta. In such cases, careful dissection is necessary to visualize the adrenal vein (right) or the aorta (left side). To gain additional exposure for adrenal resection, the colon may need additional medialization. On the right, the colon should be reflected such that the infrahepatic cava is visualized; this involves incising the peritoneum along the edge of the liver. On the left side, the surgeon may incise the lateral splenic attachments near the diaphragm and the splenorenal ligaments. The spleen will then fall medially with the colon, gaining exposure to the medial aspect of the left adrenal gland. The surgeon should generally not take down the splenocolic attachments, as several blood vessels travel in this area. If collisions ensue or mobility is impaired, the scissors are switched to the cephalad arm and the fourth-arm instrument is removed. On the right, superior retraction of the liver is often needed with an extra 5 mm port in the subxyphoid location.
-
Step 5: Remove fat around lesion to expose renal parenchyma (Fig. 5).
Fig. 5 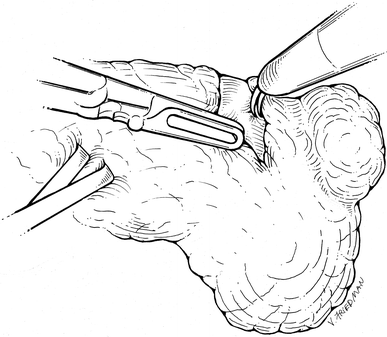
The parenchymal margins of the kidney are exposed by removing the fat around the lesion

-
Working arms (CE and LA): monopolar scissors and prograsp.
-
Fourth arm (CA): dual-blade retractor.
-
Assistant: laparoscopic ultrasound probe, suction/irrigator, 10 mm spoon.
The tumor is identified with intraoperative ultrasound. Using cautery and retraction, the parenchyma is exposed circumferentially around the tumor. Exposure of the parenchyma is important, as this edge will be sewn later in the case. The fourth arm can be used to give countertraction on the fat or the kidney. If fat is totally detached, the assistant may extract the tissue with a 10 mm spoon.
Technically, removal of adipose tissue around the tumor is not difficult except in patients with abundant adherent perinephric fat. If the perinephric fat does not easily slide off the kidney, this step becomes very tedious and time consuming, with numerous entries into vessels in Gerota’s fascia. In the initial experience, it would be prudent to avoid patients with abundant perinephric fat.
During exposure of the renal parenchyma, the OR staff should ensure that stitches are constructed for the renorrhaphy. All anticipated staff changes should occur during this step to maintain consistency of staff during tumor excision. Thrombogenic agents should be prepared so there are no distractions during clamping and tumor excision.
Intraoperative ultrasound is used to define the margins of resection and the parenchyma may be scored to delineate the margins. The deep margins should be mentally visualized with three-dimensional spatial orientation.
-
Step 6: Clamping the renal hilum (Fig. 6).
Fig. 6 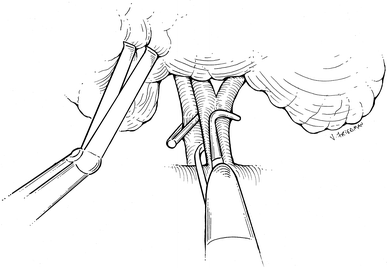
The renal hilum is clamped

-
Working arms (CE and LA): monopolar scissors and prograsp.
-
Fourth arm (CA): dual-blade retractor.
-
Assistant: laparoscopic bulldog applier and multiple bulldogs.
The renal hilum may be clamped with several types of bulldogs. Some bulldogs are controlled by the console surgeon; most are placed by the assistant. Mannitol (12.5 or 25 gm) and furosemide (10–20 mg) may be given to the patient prior to vascular occlusion. The hilum is exposed by lifting the lower pole of the kidney with the dual-blade retractor. The console surgeon may use the prograsp to retract the vein slightly to expose the artery. The artery is then clamped with a bulldog. Clamping the vein is optional, but the author prefers to clamp the vein to ensure a bloodless field and to help identify problems during resection (see step 6, below).
Theoretically, the kidney should only have one arterial vessel, but in practice, multiple arteries are not uncommon. The kidney should completely blanche when ischemic. Accessory upper pole arteries may be overlooked if the upper pole is not freed from the adrenal gland. Arterial branches may also be missed if the hilar dissection is performed too laterally, as the main artery may have branched.
Several pearls may aid in this step: 1. The author avoids the Satinsky clamp, as robotic arms may hit the device and theoretically could avulse the hilum. 2. If the assistant is inexperienced, the console surgeon may scrub into the field and clamp the hilum him/herself. 3. Some bulldogs may be handled by the prograsp and may be manipulated by the console surgeon; if this is desired, then rehearse ex vivo prior to the operation. 4. After arterial clamping, the OR timer/stopwatch should be started so that the console surgeon is aware of cumulative clamp time. The circulating nurse or anesthesiologist should call out the clamp times every 10 min so the console surgeon does not have to glance at the clock.
-
Step 7: tumor excision (Fig. 7).
Fig. 7 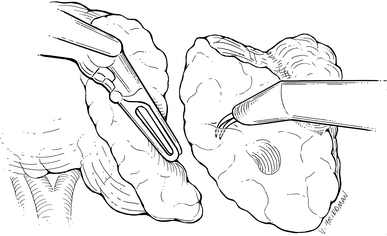
The renal mass is excised

-
Working arms (CE and LA): monopolar scissors and prograsp
-
Fourth arm (CA): dual-blade retractor.
-
Assistant: suction/irrigator.
Once clamped, the tumor is excised. The robotic three-dimensional visualization is useful when excising the tumor. The author also uses Tilepro® technology to visualize computed tomography (CT) or magnetic resonance (MR) images in the surgical field. Oncological principles should be followed; a negative margin is the paramount goal, and collecting system or hilar structures should be entered with impunity if needed. The author does not use a ureteral catheter, as the robotic camera offers superb visualization in the bloodless field, and the collecting system is identifiable. Nevertheless, a ureteral catheter, with retrograde indigo carmine injection, may be employed if desired. After excision of the tumor, the author sends frozen sections of the base of the nephrotomy. Reconstruction, however, is commenced long before these samples are reported. The ultimate utility of such frozen sections is debatable.
Bleeding from the nephrotomy while clamped is a major source of anxiety during resection, and troubleshooting must be done on the fly. First, when the kidney is initially incised, it will decompress with venous bleeding. Oozing is common for a few minutes, but should stop after the stored blood leaks out. If oozing continues for more than a few minutes, then the surgeon must question if there is ongoing flow to the kidney. Obviously, visualization of the margins is impaired with bleeding, and the surgeon must troubleshoot this situation immediately. The five major causes for ongoing bleeding are described below:
-
(a)
An accessory artery is still perfusing the kidney: occurs most commonly if the upper pole is not released from the adrenal gland and a small accessory artery is undiscovered.
-
(b)
A branch of the main artery is located behind the renal vein, and it has been missed. This occurs if the hilar dissection is performed too laterally after the main artery has branched.
To treat conditions (a) and (b), the assistant places a large bulldog across the entire hilum and places another long bulldog along the fat between the adrenal gland and the kidney.
-
(c)
The third cause of bleeding is a faulty arterial clamp, which does not occlude the artery fully. The assistant should place a second bulldog on the hilum.
-
(d)
The fourth cause is an unrecognized venous branch which is back-bleeding. This often occurs on the left side, when the vein is clamped too medially and the gonadal, lumbar, and/or adrenal vein still enter the renal vein lateral to the clamp. Replacement of the clamp is recommended.
-
(e)
The fifth cause of bleeding is from the collecting system, which may be caused by from collateral vessels from the ureter. Oversewing the collecting system results in hemostasis.
If arterial bleeding continues and all of the above maneuvers are unsuccessful, then the author would recommend unclamping a small portion of the renal vein, to allow venous outflow to counterbalance the arterial inflow. Sometimes this reduces bleeding, but sometimes it has no effect.
After excision, the renal parenchyma can be treated with an energy source, such as cautery (monopolar scissors) or an argon beam coagulator (assistant). Care should be taken with the argon beam to have veins clamped, as argon can induce gas embolism.
-
Step 8: Reconstruction (Fig. 8).
Fig. 8 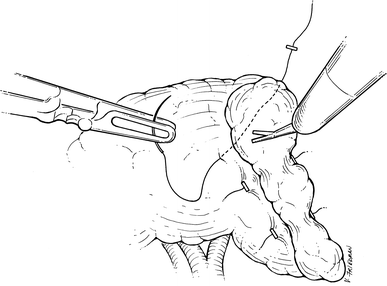
The renal parenchymal is reapproximated to close the defect

-
Working arms (CE and LA): needle driver and prograsp
-
Fourth arm (CA): dual-blade retractor or robotic clip applier.
-
Assistant: needle driver to pass/extract needles, scissors to cut suture, clip applier to tighten suture.
Only one needle driver is used since the prograsp is a much stronger grasper and is effective when tightening sutures. Additionally, the prograsp can easily be used to drive needles if the nondominant hand is needed.
The collecting system is oversewn with a 2–0 vicryl suture on an SH needle. The suture may be tied or a clip may be used to secure the suture. Individual larger veins or arteries can be sutured with figure-of-eight sutures if needed on central tumors. The parenchyma is then closed every 1 cm with a #1 vicryl suture on a CT needle. The stitches are approximately 7 cm long, and a clip has been preplaced on the distal end of the suture. After passing the suture through the parenchyma, the console surgeon grabs the stitch with the prograsp instrument and tenses the suture. Next, another clip (placed by the assistant or the robotic clip applier) is used to sandwich the renal parenchyma to ensure hemostasis. This technique has been used very effectively in the laparoscopic approach, and a similar approach is used robotically. The author usually places several sutures to completely close the parenchyma. After placing several stitches, the vein is unclamped. The artery can be unclamped as well, but if there is bleeding, more stitches need to be placed. Some surgeons use a “bolster” of thrombogenic material such as surgicel or gel foam to fill the renal defect. After the surgeon is satisfied with the closure, the assistant unclamps the hilum. Floseal may be placed at anytime during this step, depending on the surgeon’s preference and the size of the resection.
-
Step 9: Drain placement, extraction of specimen, and exiting the abdomen
Once hemostasis is achieved, the robot is undocked and the console surgeon scrubs into the operative field. The robotic camera is wielded by the assistant. The specimen is placed into an entrapment sack at the preferred extraction site. One of the robotic trocars can be removed and that site can be used for the entrapment sack. After specimen entrapment, a drain may be placed if desired. The drain is placed near the resection bed and exits out of a new puncture in the flank. If one of the existing trocar sites is used for the drain, patients will often experience leakage around the drain which soils the bed and gown of the patient. Wounds are closed with subcuticular sutures, staples, or biological adhesives.
Postoperative orders
The author checks a complete blood count and a creatinine level in the recovery room, and often a second check is performed within 12 h of surgery with larger resections. Patients are started on liquids the day after surgery, and advanced when tolerating liquids. Since essential hypertension is fairly prevalent in the author’s population, blood pressure is monitored to minimize hypertensive crisis. The drain fluid is sent for creatinine level test and the drain is removed prior to discharge if no urine leak is detected. Patients may be seen back in the office to discuss pathology results 1–2 weeks after surgery, depending on travel arrangements.
Results
The four-arm approach has been used in patients with tumors in all locations except posterior hilar midpole lesions. All cases have been successful. No cases have required conversion to open or laparoscopic techniques. As this communication represents a surgical atlas, the detailed assessment of our series is under separate submission.
Discussion
Robotic partial nephrectomy is an emerging procedure. Previous reports of robotic renal surgery are encouraging [3–5]. This submission and atlas may be useful for the surgeon who is interested in exploring minimally invasive partial nephrectomy in lieu of open partial nephrectomy or ablative technology.
There are limitations to this technique. The technique was devised on the da Vinci S system, and certainly the original da Vinci platform possesses mobility limitations which may result in tighter angles and reduced effectiveness of the fourth arm. To accommodate such limitations, the camera could be moved laterally and a 30° “up” scope could be used [3]. Although lateralization of the camera may aid in mobility, dissection of the upper pole may become more challenging. In practice, the parallelogram configuration offers sufficient mobility for virtually all resections.
Further limitations of robotic partial nephrectomy include the inherent need for the assistant to become an active participant in the surgery. The assistant may be required to achieve vascular control, biopsy the tumor bed, and place clips to sandwich the renal parenchyma. Such maneuvers are usually performed by the operating surgeon in open and laparoscopic partial nephrectomy. As instrumentation matures, it is expected that the robotic technique will continue to evolve. The newly developed robotic clip applier offers some increased control to the console surgeon.
Another limitation is for the resection of posterior tumors. Clearly a retroperitoneal approach would be more direct, but alternatively, the kidney could be mobilized and rotated so the posterior surface is visible. Such alterations may be easier to perform with an altered trocar arrangement. The author has performed this procedure with lateralization of all the trocars, and with a three-trocar approach instead of a four-trocar approach.
Lastly, the robotic approach has similar limitations to the laparoscopic approach. Such a discussion is beyond the scope of this atlas, but the major criticisms have been warm ischemia and the possibility that the laparoscopic approach may harbor more complications [1, 7]. Large series of robotic partial nephrectomy are needed to scrutinize these limitations.
References
Gill IS, Kavoussi LR, Lane BR et al (2007) Comparison of 1,800 laparoscopic and open partial nephrectomies for single renal tumors. J Urol 178:41–46
Link RE, Permpongkosol S, Gupta A et al (2006) Cost analysis of open, laparoscopic, and percutaneous treatment options for nephron-sparing surgery. J Endourol 20:782–789
Kaul S, Laungani R, Sarle R et al (2007) da Vinci-assisted robotic partial nephrectomy: technique and results at a mean of 15 months of follow-up. Eur Urol 51:186–191
Caruso RP, Phillips CK, Kau E et al (2006) Robot assisted laparoscopic partial nephrectomy: initial experience. J Urol 176:36–39
Gettman MT, Blute ML, Chow GK et al (2004) Robotic-assisted laparoscopic partial nephrectomy: technique and initial clinical experience with DaVinci robotic system. Urology 64:914–918
Patel VR, Shah KK, Thaly RK et al (2007) Robotic-assisted laparoscopic radical prostatectomy: the Ohio State University technique. J Robot Surg 1:51–59
Bhayani SB, Rha KH, Pinto PA et al (2004) Laparoscopic partial nephrectomy: effect of warm ischemia on serum creatinine. J Urol 172:1264–1266
Acknowledgments
This research was funded by the MSI research director’s fund. Chris Hyde and Katy Lyall provided developmental and technical assistance.
Open Access
This article is distributed under the terms of the Creative Commons Attribution Noncommercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License (https://creativecommons.org/licenses/by-nc/2.0), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
Bhayani, S.B. da Vinci robotic partial nephrectomy for renal cell carcinoma: an atlas of the four-arm technique. J Robotic Surg 1, 279–285 (2008). https://doi.org/10.1007/s11701-007-0055-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11701-007-0055-5