
Abstract
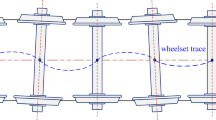
This paper presents a new method for modelling and simulation of the dynamic behaviour of the wheel-rail contact. The proposed dynamic wheel-rail contact model comprises wheel-rail contact geometry, normal contact problem, tangential contact problem and wheelset dynamic behaviour on the track. This two-degree of freedom model takes into account the lateral displacement of the wheelset and the yaw angle. Single wheel tread rail contact is considered for all simulations and Kalker’s linear theory and heuristic non-linear creep models are employed. The second order differential equations are reduced to first order and the forward velocity of the wheelset is increased until the wheelset critical velocity is reached. This approach does not require solving mathematical equations in order to estimate the critical velocity of the dynamic wheel-rail contact model. The mathematical model is implemented in Matlab using numerical differentiation method. The simulated results compare well with the estimated results based on classical theory related to the dynamic behaviour of rail-wheel contact so the model is validated.
Similar content being viewed by others

References
W. Yan, F. D. Fischer. Applicability of the Hertz contact theory to rail-wheel contact problems. Archive of Applied Mechanics, vol. 70, no. 4, pp. 255–268, 1999.
J. B. Ayasse, H. Chollet. Determination of the wheel rail contact patch in semi-Hertzian conditions. Vehicle System Dynamics, vol. 43, no. 3, pp. 161–172, 2005.
X. Quost, M. Sebes, A. Eddhahak, J. B. Ayasse, H. Chollet, P. E. Gautier, F. Thouverez. Assessment of a semi-Hertzian method for the determination of the wheel-rail contact patch. Vehicle System Dynamics, vol. 44, no. 10, pp. 789–814, 2006.
B. Jacobson, J. J. Kalker. Rolling Contact Phenomena, CISM Courses and Lectures, Springer, no. 411, pp. 1–87, 2000.
T. Telliskivi, U. Olofsson. Contact mechanics analysis of measured wheel-rail profiles using the finite element method. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, vol. 215, no. 2, pp. 65–72, 2000.
J. J. Kalker. Wheel-rail rolling contact theory. Wear, vol. 144, no. 1–2, pp. 243–261, 1991.
J. J. Kalker. Three Dimensional Elastic Bodies in Rolling Contact, 2nd ed., Berlin, Germany: Springer, 1990.
S. Iwnicki. Simulation of wheel-rail contact forces. Fatigue & Fracture of Engineering Materials and Structures, vol. 26, no. 10, pp. 887–900, 2003
J. Pombo, J. Ambrosio, M. Silva. A new wheel-rail contact model for railway dynamics. Vehicle System Dynamics, vol. 45, no. 2, pp. 165–189, 2007.
A. H. Wickens. The dynamics of railway vehicles on straight track: Fundamental considerations for lateral stability. Proceedings of the Institution of Mechanical Engineers, vol. 180, no. 6, pp. 29–44, 1965.
S. Y. Lee, Y. C. Cheng. A new dynamic model of high speed railway vehicle moving on curved tracks. Journal of Vibration and Acoustics, vol. 130, no. 1, 011009, 2008.
Rail Safety and Standards Board (RSSB). Feasibility of Reducing the Number of Standard Wheel Profile Designs, Research and Development Programme, Report Commentary, 2002.
British Standards (BSI), Specification for Railway Rails, pp. 37, 2004.
E. B. Magrab, S. Azarm, B. Balachandran, J. Duncan, K. Herold, G. Walsh. An Engineers Guide to Matlab, 1st ed., New Jersey, USA: Prentice Hall, 2000.
R. L. Burden, J. D. Faires. Numerical Analysis, 8th ed., California, USA: Thompson Brooks/Cole, 2005.
A. Jaschinski, H. Chollet, S. D. Iwnicki, A. H. Wickens, J. V. Wrzen. The application of roller rigs to railway vehicle dynamics. Vehicle System Dynamics, vol. 31, no. 5–6, pp. 345–392, 1999.
M. I. A. Lourakis. A Brief Description of the Levenberg-Marquardt Algorithm Implemented by levmar, [Online], Available: http://browse-code.mrpt.org/mrpt-0.9.0/doc/papers/levmar.pdf, March 10, 2012.
MATLAB Documentation, Mathsworks. [Online], Available: http://www.mathworks.com/help/toolbox/optim/ug/fsolve.html, March 10, 2012.
A. Anyakwo, C. Pislaru, A. Ball, F. Gu. A novel approach to modelling and simulation of the dynamic behaviour of the wheel-rail interface. In Proceedings of the 17th IEEE Conference on Automation and Computing, IEEE, Huddersfield, UK, pp. 283–288, 2011.
Author information
Authors and Affiliations
Corresponding author
Additional information
Arthur Anyakwo graduated from Federal University of Technology Owerri (FUTO), Nigeria in 2007. He received his M. Sc. (Distinction) degree from University of Strathclyde Glasgow, UK in 2009. He is currently a Ph. D. candidate in Centre for Diagnostic Engineering, University of Huddersfield, UK.
His research interests include modelling and monitoring rail-wheel contact in rolling railway vehicles using intelligent wireless sensors, wear, rolling contact fatigue, wheel profile design, and railway vehicle dynamics.
Crinela Pislaru obtained M. Eng. (Distinction) degree in electrical and electronic engineering from Transilvania University Brasov, Romania in 1991. She received her Ph.D. degree in control engineering from the University of Huddersfield, UK in 2001. Currently, she is senior lecturer in the Engineering and Technology Department at the University of Huddersfield, UK. She is the author of over 90 refereed publications and a reviewer for several internationally leading journals. She has been working on EPSRC and EU projects with the total amount of over 600K and currently co-ordinates rail research activities within the UK Centre for Diagnostic Engineering.
Her research interests include intelligent control systems, mechatronic technologies, real time implementation, multibody system dynamics, expert systems, ultrasonics, process monitoring, modeling, control and optimal design, self-maintenance of electrical drives, and automation.
Andrew Ball obtained B. Eng. degree in mechanical engineering from University of Leeds, UK in 1987. Later on he received the Ph.D. degree in machinery condition monitoring from the University of Manchester. Currently, he is a professor of diagnostic engineering and pro-vice-chancellor for research and enterprise at the University of Huddersfield, UK. Also he is the director of the UK Centre for Diagnostics Engineering — the largest independent engineering diagnostics R&D activity in the world. The Centre specialises in machinery condition and performance monitoring, data analysis, signal processing and sensor systems design and development. He is the author of well over 200 technical and professional publications, and he has spent a large amount of time lecturing and consulting to industry in all parts of the world.
His research interests include detection and diagnosis of faults in mechanical, electrical and electro-hydraulic machines, and data analysis and signal processing.
Rights and permissions
About this article
Cite this article
Anyakwo, A., Pislaru, C. & Ball, A. A new method for modelling and simulation of the dynamic behaviour of the wheel-rail contact. Int. J. Autom. Comput. 9, 237–247 (2012). https://doi.org/10.1007/s11633-012-0640-6
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-012-0640-6