
Abstract
We study analytical properties of a semi-discrete discontinuous Galerkin (DG) scheme for the kinetic Cucker–Smale (CS) equation. The kinetic CS equation appears in the mean-field limit of the particle CS model and it corresponds to the dissipative Vlasov type equation approximating the large particle CS system. For this proposed DG scheme, we show that it exhibits analytical properties such as the conservation of mass, \(L^2\)-stability and convergence to the sufficiently regular solution, as the mesh-size tends to zero. In particular, we verify that the convergence rate of the DG numerical solution to the sufficiently regular kinetic solution is dependent on the Sobolev regularity of the kinetic soluiton. We also present several numerical simulations for low-dimensional cases.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Flocking of self-propelled particles (agents) denotes a collective motion in which particles are organized into an ordered state from a disordered state only using the limited environmental information and simple rules. It appears in natural and man-made systems [1, 4, 5, 47, 49], e.g., flocking of birds, drones and robots, flocking of birds, swarming of fish and herding of sheep, etc. Despite of its ubiquitous presence, modeling and analysis for flocking were begun only several decades ago. After Reynolds’ boid model [45], Vicsek et al. [48] proposed a simple discrete planar model with a unit speed constraint. As far as the authors know, there is no rigorous convergence proof for the Vicsek model (see [37] for a convergence proof under a priori connected assumption for each instant). To circumvent this a priori connectedness assumption, Cucker and Smale introduced a second-order Newton type model [22, 23] for position and velocity which we call it as the Cucker–Smale (in short CS) model. In fact, the CS model uses a weighted sum of relative velocities as an force. For a brief introduction on CS flocking, we refer to a survey article [13]. To set up the stage, we begin with a brief discussion for the (particle) CS model.
Let \(x_i\) and \(\xi _i\) be the position and velocity of the ith CS particle on a spatial domain \(\Omega ^x (\subset {\mathbb {R}}^d)\), respectively. Then, the CS model reads as follows.
where N and \(\psi \) denote the total number of particles and Lipschitz continuous communication weight function satisfying symmetry and boundedness, respectively: there exists a positive constant \(\psi _M\) such that
The global well-posedness for (1)–(2) is guaranteed by the standard Cauchy–Lipschitz theory. Hence, most literature for (1) are concerned with the emergence of flocking under various contexts, e.g., collision avoidance [18, 19], stochastic environment [2, 21, 25, 26, 33, 44], time-delay [27], network topologies [20, 24, 38, 39], relativistic and thermodynamic effects [32, 36], etc.
On the other hand, when the number of particles is sufficiently large (namely a mesoscopic regime), direct integration of (1) will be too expensive to describe the motion of CS ensemble with \(N \gg 1\). Hence, as an effective mean-field approximation of a large particle system (1), we can use the corresponding mean-field kinetic equation (see [34] for the mean-field limit). More precisely, let \(f = f(t, x, \xi )\) be the one-particle distribution function at position x, velocity \(\xi \) at time t. Then, the temporal-phase space evolution of f is governed by the following initial boundary value problem to the kinetic CS equation on a spatial domain \(\Omega ^x (\subset {\mathbb {R}}^d)\):
subject to suitable boundary conditions on \(\partial ( \Omega ^x \times {\mathbb {R}}^d)\). Here \(F_a(f)\) is a velocity alignment force whose explicit form is given as follows:
The global well-posedness and flocking dynamics of the Cauchy problem (3)–(4) have been extensively studied in [11, 29, 34, 35]. However due to the non-local nature of (4), numerical implementation of (3) is less investigated. Recently, structure and positivity preserving schemes are proposed for the related collective models such as the continuum Kuramoto model [8] and kinetic flocking model [46]. In particular, the latter work [46] introduces a fully discrete DG scheme for (1) and flocking model [40] in one-dimensional setting and the author also showed that his DG scheme exhibits a positivity preserving property which results in the stability in \(L^1\) under the suitable CFL type condition on time-step and mesh size. The DG method, proposed in [46], can be reduced to a classical high order finite volume method, which is proved to be positive preserving, for (3), where the transport term is neglected and the velocity alignment (4) is independent on the space variable. As long as there is no confusion, we will use the jargons “kinetic model” and “kinetic equation” interchangeably.
The main results of this paper are two-fold. First, we introduce a local discontinuous Galerkin method for the computation of the approximate solution with high order approximations in time, space and velocity (see Sect. 2.2. Indeed, the preservation of high order accuracy allows us to investigate complicate structures in space, as it has already been observed for macroscopic models. Discontinuous Galerkin methods [6, 15, 17, 30, 31] are particularly suited for transport type equations with several attractive properties, such as their easiness for adaptivity and parallel computation, and their nice stability properties. We refer to the survey paper [16] and the references therein for a discontinuous Galerkin methods. For discontinuous Galerkin methods solving kinetic type equations we refer to [3, 12]. Discontinuous Galerkin methods are particularly suitable for transport type equations with several attractive properties, such as their easiness for adaptivity and parallel computation, and their nice stability properties. Second, we study \(L^2\)-stability, consistency and convergence of numerical solutions given by the discontinuous Galerkin method for (3) and (4) (see Theorem 2.5).
The paper after this introduction is organized as follows. In Sect. 2, we study basic properties and well-posedness of the kinetic CS model, and discuss a semi discrete discontinuous Galerkin numerical approximation and main results. In Sect. 3, we study the mass conservation and \(L^2\)-stability of the numerical solutions. In Sect. 4, we provide an \(L^2\)-convergence of numerical solutions to the regular solutions to the kinetic CS model. In Sect. 5, we present several numerical implementations in one and two dimensional settings. Finally, Sect. 6 is devoted to a brief summary of our main results and some remaining issues for a future work.
Notation In what follows, we often suppress domain depencence \(\Omega ^x \times {\mathbb {R}}^d\) for Lebesgue space \(L^p(U \times {\mathbb {R}}^d)\):
As long as there is no confusion, we use the subscript and superscript to denote the particle number and component, respectively, i.e., \(x_i^j, \xi _i^j\) are the jth spatial and velocity component of the ith particle:
2 Preliminaries and main results
In this section, we first present basic properties of the kinetic Cucker–Smale model and review the global well-posedness of the Cauchy problem to (3)–(4), and then we delineate a semi-discrete discontinuous Galerkin method and provide our main results on the \(L^2\)-stability and convergence of numerical solutions.
2.1 The kinetic CS equation on \(\Omega ^x = {\mathbb {R}}^{d}\)
Consider the Cauchy problem to the kinetic CS equation on the whole space \({\mathbb {R}}^{2d}\):
In what follows, we discuss the propagation of the first three velocity moments: for \(t \ge 0\),
where \(z = (x, \xi )\) and \(dz = d\xi dx\).
Lemma 2.1
Let \(f = f(t, z)\) be a global classical solution to (5) which decays to zero sufficiently fast at infinity in the phase space. Then, velocity moments \(m_i,~i=0,1,2\) satisfy the following relations: for \(t \ge 0\),
Proof
(i) The first relation directly follows from the integration of (5)\(_1\) over \({\mathbb {R}}^{2d}\) using the divergence theorem and fast decay of f at infinity. For the second relation, we multiply \(\xi \) to (5)\(_1\) to find
Again we integrate the above equation over \({\mathbb {R}}^{2d}\) using the symmetry property of \(\psi \), and use the divergence theorem to find the desired relation.
(ii) We use (5)\(_1\) to find
Now, we integrate (6) over \({\mathbb {R}}^{2d}\) and use index exchange transformation \((x, \xi ) \leftrightarrow (x_*, \xi _*)\) to get
Again, we integrate the above relation in time to get the desired estimate. \(\square \)
Remark 1
Note that if we assume that initial total mass is unity, then total mass is conserved in time:
Next, we discuss the dynamics of particle trajectories (or bi-characteristics) corresponding to (5). For this, we rewrite (5)\(_1\) into a quasi-linear form:
Note that the coefficient \(-(\nabla _{\xi } \cdot F_a(f))\) in the R. H. S. of (7) can be rewritten as
This yields
For \((x, \xi ) \in \text{ supp}_{(x, \xi )} f_0\), we define bi-charteristics (forward particle trajectory):
as a solution to the following ODE system:
Lemma 2.2
Suppose that the communication weight function \(\psi \) satisfies an extra condition together with (2): there exists positive constants \(\psi _m\) and \(\psi _M\) such that
and let \((x(t), \xi (t))\) be the particle trajectory of (5) issued from \((x, \xi ) \in \text{ supp } f_0\) at time 0. Then, the ith velocity component \(\xi _i(t)\) satisfies
Here uniform lower and upper bounds \(\underline{\xi }^i\) and \(\overline{\xi }^i\) are defined as follows.
Proof
We use the same argument in [35]. For \((x, \xi ) \in \text{ supp}_{(x, \xi )} f_0\) at time 0, we set
Then, it follows from (8)\(_2\) that for \(l \in [d]\),
Below, we estimate \(\alpha _i,~i=1,2\) one by one.
\(\bullet \) (Estimate of \(\alpha _1\)): we apply the extra condition (9) to find
\(\bullet \) (Estimate of \(\alpha _2\)): again, we use (9), the Cauchy-Schwarz inequality and Lemma 2.1 to obtain
Now, in (11) we combine all the estimates (12) and (13) to get differential inequalities:
Then, we use the Gronwall type arguments to derive the desired estimates. \(\square \)
Remark 2
Below, we briefly comment on the result of Lemma 2.2.
-
1.
Note that the explicit relations (10) imply
$$\begin{aligned} \begin{aligned}&\min \Big \{ \min _{1 \le i \le d} \xi ^i(0),~-\frac{\psi _m}{\psi _M} \sqrt{ \frac{m_2(0)}{m_0(0)} } \Big \} \le \inf _{0 \le t< \infty } \underline{\xi }^i (t), \,\, \lim _{t \rightarrow \infty } \underline{\xi }^i (t) = -\frac{\psi _m}{\psi _M} \sqrt{ \frac{m_2(0)}{m_0(0)} }, \\&\sup _{0 \le t < \infty } \overline{\xi }^i (t) \le \max \Big \{ \max _{1 \le i \le d} \xi ^i(0),~\frac{\psi _M}{\psi _m} \sqrt{ \frac{m_2(0)}{m_0(0)} } \Big \}, \,\, \lim _{t \rightarrow \infty } \overline{\xi }^i (t) = \frac{\psi _M}{\psi _m} \sqrt{ \frac{m_2(0)}{m_0(0)} }. \end{aligned} \end{aligned}$$ -
2.
Suppose that communication weight and initial datum satisfy
$$\begin{aligned} \psi \equiv 1, \quad m_0(0)< \infty , \quad |m_1(0) | < \infty . \end{aligned}$$Then, it follows from (11) that particle trajectory \(\xi ^i(t)\) satisfies
$$\begin{aligned} \frac{d \xi (t)}{dt} = -m_0(0) \xi (t) + m_1(0), \quad t > 0. \end{aligned}$$By direct calculation, one has
$$\begin{aligned} \begin{aligned}&\xi (t) = \frac{m_1(0)}{m_0(0)} + \Big ( \xi - \frac{m_1(0)}{m_0(0)} \Big ) e^{-m_0(0) t}, \\&x(t) = x + \frac{m_1(0)}{m_0(0)} t + \frac{1}{m_0(0)} \Big ( \xi - \frac{m_1(0)}{m_0(0)} \Big ) (1 - e^{-m_0(0) t}). \end{aligned} \end{aligned}$$Therefore we have
$$\begin{aligned} \lim _{t \rightarrow \infty } \Big | \xi (t) - \frac{m_1(0)}{m_0(0)} \Big | = 0, \quad \lim _{t \rightarrow \infty } \Big | x(t) - x - \frac{m_1(0)}{m_0(0)} t - \frac{1}{m_0(0)} \Big ( \xi - \frac{m_1(0)}{m_0(0)} \Big ) \Big | = 0. \end{aligned}$$
Next, we return to the global well-posedness of (5). Then, the global well-posedness of (6) follows from a priori \(W^{k, \infty }\)-estimates along the particle trajectory.
Theorem 2.3
[35] Suppose that the initial datum \(f_0\) is compactly supported in the phase space and sufficiently regular such that
Then for any \(T \in (0, \infty )\), there exists a unique classical solution \(f(t) \in W^{k, \infty }({\mathbb {R}}^{2d})\) for \(t \in (0, T)\) and a positive constant C(T) such that
Proof
The proof is basically based on a priori estimate on the control of \(W^{k, \infty }\)-norm for f along bi-characteristics: for \(T \in (0, \infty )\), let \((x(t), \xi (t))\) be a particle trajectory defined by (8). Then, we have
This yields
For the higher-order \(W^{k, \infty }\)-estimate, we use the same arguments to get
Then we combine the above a priori estimate (14) and standard local existence result to derive a global existence of classical solution for \(k \ge 2\). We refer to [35] for details. \(\square \)
Next, we discuss a global well-posedness of a measure-valued solution to the Cauchy problem (5). For the concept of measure-valued solutions, we refer to [34]. Now, we briefly recall some jargons. For the particle solution \((x_i(t),\xi _i(t))\) to (1), we introduce the associated empirical measure \(\mu ^N(t)\):
Then we can show that \(\mu ^N\) satisfies the Eq. (5) in the sense of distributions, i.e., \(\mu ^N\) is a measure-valued solution to (5).
Let \({\mathcal {M}}({\mathbb {R}}^{2d})\) be the set of positive Radon measures and we fix \(T > 0\). Then, we define the set \({{\mathcal {S}}}\) of test functions and a bounded Lipschitz distance \(d_{BL}(\mu _1,\mu _2)\) on \({{\mathcal {S}}}\) as follows:
Theorem 2.4
[34] Suppose that the initial measure \(f_0 dx d\xi \in {\mathcal {M}}({\mathbb {R}}^{2d} )\) is compactly supported, and we take a sequence of \(\mu ^N_0\) of measures of the form \(\mu ^N_0 = \frac{1}{N} \sum _{i=1}^N \delta _{(x_i(0), \xi _i(0))}\) such that
Define the empirical measure \(\mu _N(t)\) made of particle solution \((x_i, \xi _i)\) with initial data \((x_i(0), \xi _i(0))\). Then there exists a unique measure-valued solution f to (5) with the initial datum \(f_0\) such that
2.2 A semi-discrete DG scheme
In this subsection, we describe a semi-discrete DG scheme for (5) on the spatial periodic domain \(\Omega ^x\).
Suppose that \(\psi \) and initial datum \(f_0\) are spatially periodic with the same period, and compactly supported in the velocity variable. Then, it is easy to see that the solution f is periodic in spatial variable and compactly supported in velocity variable as well. Before we describe the DG scheme, we first discuss finite-dimensional function spaces. Let \(\Omega =\Omega ^x\times \Omega ^\xi \subset {\mathbb {R}}^d\times {\mathbb {R}}^d\) be an open bounded set such that
and we set \(\partial \Omega ^x\) and \(\partial \Omega ^\xi \) to be the boundaries of \(\Omega ^x\) and \(\Omega ^\xi \), respectively. Let \({\mathcal {P}}_h(\Omega ^x)= \left\{ \Omega ^x_h \right\} \) and \({\mathcal {P}}_h(\Omega ^\xi )= \{\Omega ^\xi _h\}\) be the partitions of \(\Omega ^x\) and \(\Omega ^\xi \) with maximal amplitude h, respectively and we define a partition of \(\Omega \) as follows:
On the other hand, for a nonnegative integer k, let \(P^k(\Omega _h^x\times \Omega _h^\xi )\) be the set of polynomials of total degree at most k on \(\Omega _h^x\times \Omega _h^\xi \). We define the discrete P-type space:
to be used for the approximation of the kinetic function f. We also recall that one can replace the space \({\mathcal {G}}^k_h\) by the space \(P^k(\Omega _h^x)\times P^k(\Omega _h^\xi )\). Moreover, we use the Q-type space, \(Q^k(\Omega _h^x\times \Omega _h^\xi )\) which is the set of polynomials of degree at most k in each variable in \(\Omega _h^x\times \Omega _h^\xi \), then
or the space \(Q^k(\Omega _h^x)\times Q^k(\Omega _h^\xi )\). The presented results hold for each space defined above in the same manner. For the simplicity of notation, we formulate our results in the space \({\mathcal {G}}_h^k\) only, but the same arguments can be done for Q-type space. We will make this more precise in Sect. 5.
Next, we are ready to delineate a semi-discrete DG scheme for (5). For fixed k, h and \(\Omega _h^x\times \Omega _h^\xi \in {\mathcal {P}}_h(\Omega ^x\times \Omega ^\xi )\), we look for \(f_h(t,\cdot ,\cdot )\in {\mathcal {G}}^k_h\) such that
where \(n_{x}\) and \(n_{\xi }\) are the outward unit normal vectors of \(\partial \Omega _h^x\) and \(\partial \Omega _h^{\xi }\), resepctively and all hat functions are numerical fluxes determined by upwind condition (see upwind standard formulation [6, 12]):
where
are the average and the jump across the edge \(\Omega ^{x^{+}}_h\cap \Omega ^{x^{-}}_h\) for a piecewise functions \(f_{h}\) in x, with \(x^{+}\in \Omega ^{x^+}_h\) and \(x^{-}\in \Omega ^{x^-}_h\), respectively. The expressions \( \left\{ f_{h}\right\} _{\xi }\) and \( \left[ f_{h}\right] _{\xi }\) can be defined similarly.
2.3 Main results
Define the local mass density \(\rho _h\) as
Now, we are ready to state our main results in the following theorem.
Theorem 2.5
Suppose that initial datum \(f_h(0,\cdot ,\cdot )\) is compactly supported and lies in the space \(W^{2,\infty }(\Omega ^x\times \Omega ^{\xi })\), and let f be a classical solution to (5) such that
and let \(f_h \in {\mathcal {G}}^k_h\) be a numerical solution given by the semi-discrete DG scheme supplemented with periodic boundary conditions in \(\Omega ^x\times \Omega ^\xi \). Then, for any \(h_0, T \in (0, \infty )\), there exists a positive constant \(C_T = C(f, T, h_0)\) such that for \(h < h_0\) and \(t \in [0, T]\), the following assertions hold:
-
1.
(Mass conservation and \(L^2\)-stability):
$$\begin{aligned} \frac{d}{dt} \int _{\Omega ^x}\rho _{h}(t,x)dx=0 \quad \text{ and } \quad \Vert f_h(t)\Vert _{L^2(\Omega )} \le C_T. \end{aligned}$$(17) -
2.
(\(L^2\)-convergence):
$$\begin{aligned} \Vert f(t)-f_h(t)\Vert _{L^2(\Omega )}\le C_T h^{k+1/2}. \end{aligned}$$(18)
Proof
Since the proof is very lengthy, we leave its proof in Sects. 3 and 5. \(\square \)
3 Mass conservation and \(L^2\)-stability
In this section, we provide the proof of the first assertion (17) on the mass conservation and the \(L^2\)-stability of the numerical solution \(f_h\) to the semi-discrete DG scheme described in Sect. 2.2.
3.1 Mass conservation
For fixed h and k, let \(f_h \in {\mathcal {G}}_h^k\) be the numerical solution to the semi-discrete nonlinear Galerkin method for (5) supplemented with periodic boundary conditions. We choose the test function
Then, it is easy to see that
This and (15)\(_1\) yield
We sum (19) over all the partitions using the periodic boundary condition to find the mass conservation:
3.2 \(L^2\)-stability
Let h, k and \(T>0\) be fixed. Suppose that the initial datum \(f_h(0,\cdot ,\cdot )\in \left( C^1\cap W^{2,\infty }\right) \left( \Omega ^x\times \Omega ^\xi \right) \) and let \(f_h \in {\mathcal {G}}_h^k\) be a numerical solution to (15) with periodic boundary conditions. Then, (17)\(_2\) can be divided into two steps.
\(\bullet \) Step A (Differential inequality for \(\left\| f_{h}\right\| _{L^{2}}^{2}\)): we claim that
for each \(t>0\).
Proof of claim (20)
In (15)\(_1\), we choose \(g = f_h\) as a test function to find
In what follows, we estimate each term \({{\mathcal {I}}}_{1i}\) one by one. \(\square \)
\(\diamond \) Case A.1 (Estimates of \({{\mathcal {I}}}_{11}\)): by direct calculation, we have
\(\diamond \) Case A.2 (Estimate of \({{\mathcal {I}}}_{12}\) and \({{\mathcal {I}}}_{13}\)): by integration by parts, we have
Similarly, we have
\(\diamond \) Case A.3 (Estimate of \({{\mathcal {I}}}_{14}\) and \({{\mathcal {I}}}_{15}\)): by direct calculations, we have
In (21), we combine (22), (23), (24), (25) and use (16) to get the desired estimate:
where we used (16) in the last equality.
\(\bullet \) Step B (A bound for \(\left\| f_{h}\right\| _{L^{2}}^{2}\)): it follows from (20) that
where we used (2), (15)\(_2\) and conservation of mass to find
Then, we apply Gronwall’s lemma for (26) to obtain, for \(t \in [0,T]\),
Now we set
to get the desired \(L^2\)-stability estimate:
4 Preparatory lemmas for convergence analysis
In this section, we study several preparatory estimates to be used in the \(L^2\)-convergence of the numerical solution \(f_h\) for (15) to the classical solution f for (5).
4.1 Error functional
Let f an g be piecewise \(C^1\) functions in each partition box \(\Omega ^x_h\) and \(\Omega _h^\xi \), and we also assume that f has integrable first time-derivative. Then, we set
For a classical solution f and semi-disctete DG solution \(f_h\), one has
Note that
where \({\mathcal {L}}\) is the linear part of \({\mathcal {E}}\), while the terms \({\mathcal {N}}\) and \({\mathcal {N}}_{h}\) are nonlinear.
4.2 Estimates for \({{\mathcal {L}}}\) and \({{\mathcal {N}}}\)
In this subsection, we study reduced expressions for the linear and nonlinear functionals introduced in (27). We denote the \(L^2\)-projection onto \({\mathcal {G}}_h^k\) by \({{\mathbb {P}}}_h\), and we set
Lemma 4.1
The linear functional \({{\mathcal {L}}}\) defined in (27) satisfies
where \({{\mathcal {K}}}\) is given by
Proof
It follows from (28) that
Then, we use (31) to get
where \({\mathcal {K}}\) is given by (30). \(\square \)
Lemma 4.2
The functional \({{\mathcal {N}}}\) defined in (27) satisfies
where \({{\mathcal {H}}}\) is given by
Proof
Recall that
Then, these yield
Next, we estimate the term \({{\mathcal {I}}}_{2i}\) one by one.
\(\bullet \) (Estimate of \({{\mathcal {I}}}_{21}\)): note that
Below, we estimate the term \({{\mathcal {I}}}_{21i},~i=1,2,3\) one by one.
\(\diamond \) (Estimate of \(-{{\mathcal {I}}}_{211}\) and \(-{{\mathcal {I}}}_{213}\)): note that
and
\(\bullet \) (Estimate of \({{\mathcal {I}}}_{22}\)): by direct estimate, we have
Finally, we combine all the estimates (34), (35), (36) and (37) to obtain
where we used
Moreover, we have
We combine (38) and (39) to obtain
\(\square \)
4.3 \(L^{\infty }\)-estimates for \({{\mathcal {K}}}\) and \({{\mathcal {H}}}\)
In this subsection, we study uniform bound estimate for functionals defined in (30) and (33). For this, we first recall a lemma regarding approximation and Poincare type inequality. We set
Lemma 4.3
[15] Let k and h be a nonnegative integer and positive real number, respectively, and let \(\Omega = \Omega ^{x} \times \Omega ^{\xi }\) be a periodic domain in x and \(\xi \)-variables. We denote the \(L^2\)-projection onto \({\mathcal {G}}_h^k\) by \({{\mathbb {P}}}_h\). Then, there exists a positive constant \(C = C(k, \Omega ) > 0\) independent of h such that the following assertions hold.
-
1.
(Approximation properties): for any \(g\in H^{k+1}(\Omega )\) and \(\Omega _h \in {\mathcal {P}}_h(\Omega )\),
$$\begin{aligned} \Vert g- {{\mathbb {P}}}_h g\Vert _{L^2(\Omega _h)}+h^{1/2} \Vert g- {{\mathbb {P}}}_h g\Vert _{L^2(\partial \Omega _h)}\le C h^{k+1}\Vert g\Vert _{H^{k+1}(\Omega )}, \end{aligned}$$(41) -
2.
(Poincare type inequality): for any \(g \in P^k(\Omega _h)\) with \(\Omega _h \in {\mathcal {P}}_h(\Omega )\),
$$\begin{aligned} \Vert \nabla _{x} g\Vert _{L^2(\Omega _h)}\le \frac{C}{h}\Vert g\Vert _{L^2(\Omega _h)}, \quad \Vert \nabla _{\xi } g\Vert _{L^2(\Omega _h)}\le \frac{C}{h}\Vert g\Vert _{L^2(\Omega _h)}. \end{aligned}$$(42)
Now, we are ready to provide \(L^\infty \)-estimates for \({\mathcal {K}}\) and \({\mathcal {H}}\) in the following two lemmas.
Lemma 4.4
For a positive constant \(h_0 \), if \(h \le h_0\), there exits a positive constant \(C = C(k, \Omega )\) independent of the mesh sizes h such that
Proof
Note that
Below, we estimate the term \({{\mathcal {I}}}_{3i},~i=1,2,3\) one by one.
\(\bullet \) (Estimate of \({{\mathcal {I}}}_{31}\)): now, we use (41) and Young’s inequality to get
\(\bullet \) (Estimate of \({{\mathcal {I}}}_{32}\)): let \(\xi _{0}\) be the \(L^{2}\) projection of \(\xi \) onto the piecewise constant space with respect to \({\mathcal {P}}_h(\Omega )\). Then, we have
By definition of \(\sigma _{h}\) in (28), it follows from [28] that
Then, we use (41), (42), (46) and (47) to find
where we used \(\left\| \xi -\xi _{0}\right\| _{L^{\infty }} \le C h\) in [28].
\(\bullet \) (Estimate of \({{\mathcal {I}}}_{33}\)): we use (40) to find
In (44), we combine all the estimates (45), (48) and (49) to find the desired estimate. \(\square \)
Recall that the quantity \(\left\| F_a(f_h)\right\| _{\infty }\) is bounded for each time \(t\in [0,T]\) as \(f_h\in {\mathcal {P}}_h^k(\Omega )\).
Lemma 4.5
For \(h_0 > 0\), if \(h \le h_0\), there exits a positive constant \(C = C(k, \Omega )\) independent of the mesh sizes h such that
Proof
It follows from (33) that
Below, we estimate the term \({{\mathcal {I}}}_{4i}\) one by one.
\(\bullet \) (Estimate of \( {{\mathcal {I}}}_{42}\)): we use (40) and (41) to obtain
\(\bullet \) (Estimate of \( {{\mathcal {I}}}_{41}\)): similarly, one has
In (51), we combine (52) and (53) to get the desired estimate. \(\square \)
In the following lemma, we give an \(L^2\)-estimate of the velocity divergence of the interaction term:
Lemma 4.6
For \(h_0 > 0\), if \(h \le h_0\), there exits a positive constant \(C = C(k, \Omega )\) independent of the mesh sizes h such that
Proof
We use (41) and (42) to find the desired estimate:
\(\square \)
5 \(L^2\)-convergence
In this section, we provide the proof of the second part in Theorem 2.3 on \(L^2\)-convergence. Suppose that the initial data \(f_h(0)\) lies in \((C^1 \cap W^{k,\infty })(\Omega ^x\times \Omega ^\xi ),~k \ge 2\) and f is the corresponding classical solution to (3)–(4) satisfying the regularity assumption:
Let \(f_h \in {\mathcal {G}}^k_h\) be the numerical solution given by the semi-discrete DG scheme supplemented with periodic boundary conditions in \(\Omega ^x\times \Omega ^\xi \). Then, we claim that for any \(h_0 > 0\), there exists a positive constant \(C_T = C(f, T, h_0) > 0\) such that for \(h < h_0\)
In what follows, we provide a derivation of (55). For this, we use (29), (32) and
to find
where \({\mathcal {K}}\) and \({\mathcal {H}}\) are given in (30) and (33), respectively. We use (43), (50) and (54) to rewrite (56) as
This yields
Now, we estimate \(\left\| F_a(f_h)\right\| _{\infty }\) as follows.
Since \(h<h_0\), we can chose a positive constant C such that one can rewrite (57) as
Again, this yields
Finally, we apply Gronwall’s lemma to (58) and use the projection inequality (41) to find
This completes the proof.
In the sequel, we provide a corollary which improves the \(L^2\)-stability estimate and the \(L^\infty \) bound of the interaction function in term of h, and the \(L^2\)-norm of the classical solution.
Corollary 5.1
Suppose that the same assumptions in Theorem 2.5 hold, and let f and \(f_h \in {\mathcal {G}}^k_h\) be a classical solution to (5) and a numerical solution given by the semi-discrete DG scheme supplemented with periodic boundary conditions in \(\Omega ^x\times \Omega ^\xi \). Then, we have the following estimates:
Proof
(i) Note that
Then, we use the above relation and (18) to get the desired estimate.
(ii) We use the result (i) and the relation
The third estimate can be treated analogously. \(\square \)
6 Numerical simulations
In this section, we present several numerical results. Let \(\phi _j\), for \(j=1,\dots ,N_k\) be the \(N_k\)-polynomials of k almost degree in the box \(\Omega _h^{x} \times \Omega _h^{\xi }\) (for example Lagrange interpolant polynomials or Legendre polynomial expansion). Then, we set
On each box of the partition, we have the following system of ODEs:
where the square matrices \({\mathcal {M}} = ({\mathcal {M}}_{ij}), {{\mathcal {S}}}^1 = ({{\mathcal {S}}}^1_{ij})\) and a vector \( {\mathcal {S}}^2(\textbf{f}_h) \) are defined as follows.
and the integral in the interaction term \(F_a(f_h)\) is computed by the Cavalieri-Simpson rule on a grid which ensures the \(h^{2k}\) convergence. To solve the method of lines ODE resulting from the semi-discrete DG scheme (\({\mathcal {M}}\) is invertible and \({\mathcal {R}}={\mathcal {M}}^{-1}{\mathcal {S}}\)):
we use the total variation diminishing third order Runge–Kutta method (see [30, 31]):
where \(\textbf{f}^n_h\) represents a numerical approximation of the solution at discrete time \(t^n\). Such time stepping methods are the convex combinations of the Euler forward time discretization. We now present a numerical experiment.
Consider the domain
with boundary condition in the x domain and zero at the boundary of the velocity domain. The region is divided into N rectangles, and we choose Lagrange polynomial of degree less then 2 (\(N_2=6\)), on each rectangle. Consider the following initial datum:
As the initial datum is rapidly decaying, it is almost zero at the boundaries of the computational domain considered. So that we can assume that it is periodic in x and with compact support in \(\xi \). As a communication weight function, we consider
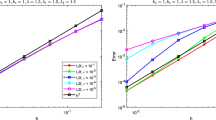
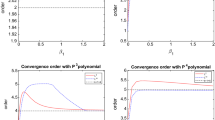
with \(\beta =2\) (see [13]). The numerical computation is performed up to a time such that the numerical solution is compactly supported in the \(\xi \) variable. In our case this time is \(t\approx 2.5\). The order of accuracy of the method is summarized in the table below, where the errors and the orders are computed at time \(t=1\):
N | \(L^2\) error | Order | \(L^\infty \) error | Order | |
|---|---|---|---|---|---|
\(k=2\) | 16 | 0.113 | 1.98 | 0.0855 | 2.73 |
64 | 0.0381 | 2.22 | 0.0253 | 2.94 | |
256 | 0.0142 | 2.48 | 0.0105 | 3.01 |
In Fig. 1, we show the temporal evolution of the mass density function
and the evolution in time of the total mass \(\int _{[-\pi ,\pi ]}\rho _h(t,x)dx,\) which is shown to be constant up to fifth digit order.

Temporal evolutions of \(\rho _h\) and \(\Vert \rho _h \Vert _{L^1}\)
7 Conclusion
In this paper, we have presented a semi-discrete DG scheme tor the kinetic Cucker–Smale equation. The kinetic Cucker–Smale equation is a dissipative Vlasov type equation whose total energy is non-increasing along the solution. This is a contrasted difference with the classical Vlasov equation. From the viewpoint of numerics, due to the non-local nature of velocity alignment forcing, its numerical studies are vary few, compared to extensive analytical studies. We showed that our proposed semi-discrete DG scheme exhibits three crucial properties such as the total mass conservation, \(L^2\)-stability estimate and \(L^2\)-convergence of the numerical solution to the corresponding classical solution to the kinetic CS equation. Moreover, we showed that the convergence is at most \(k + \frac{1}{2}\), as long as the target classical solution lies in \(H^{k+ 2}\). In this paper, we assume that the communication weight function is bounded. However, there are several analytical studies [7, 9, 10, 14, 41,42,43] for the particle and kinetic CS models with singular communication weights. Thus, it would be interesting to extend current DG method to the setting with a singular communication weight. We leave this interesting problem for a future work.
References
Acebrón, J.A., Bonilla, L.L., Pérez Vicente, C.J.P., Ritort, F., Spigler, R.: The Kuramoto model: a simple paradigm for synchronization phenomena. Rev. Mod. Phys. 77, 137–185 (2005)
Ahn, S., Ha, S.-Y.: Stochastic flocking dynamics of the Cucker–Smale model with multiplicative white noises. J. Math. Phys. 51, 103301 (2010)
Ayuso De Dios, B., Carrillo, J.A., Shu, C.-W.: Discontinuous Galerkin methods for the multi-dimensional Vlasov–Possion problem. Math. Models Methods Appl. Sci. 22, 1250042 (2012)
Ballerini, M., Cabibbo, N., Candelier, R., Cavagna, A., Cisbani, E., Giardina, I., Lecomte, V., Orlandi, A., Parisi, G., Procaccini, A., Viale, M., Zdravkovic, V.: Interaction ruling animal collective behavior depends on topological rather than metric distance: evidence from a field study. Proc. Natl. Acad. Sci. USA 105, 1232–1237 (2008)
Bellomo, N., Ha, S.-Y.: A quest toward a mathematical theory of the dynamics of swarms. Math. Models Methods Appl. Sci. 27, 745–770 (2017)
Brezzi, F., Cockburn, B., Marini, L.D., Suli, E.: Stabilization mechanisms in discontinuous Galerkin finite element methods. Comput. Methods Appl. Mech. Eng. 195, 3293–3310 (2006)
Byeon, J., Ha, S.-Y., Kim, J.: Asymptotic flocking dynamics of a relativistic Cucker–Smale flock under singular communications. J. Math. Phys. 63, 012702 (2022)
Carrillo, J.A., Choi, Y.-P., Pareschi, L.: Structure preserving schemes for the continuum Kuramoto model: phase transitions. J. Comput. Phys. 376, 365–389 (2019)
Carrillo, J.A., Choi, Y.-P., Hauray, M.: Local well-posedness of the generalized Cucker–Smale model with singular kernels. In: Mathematical Modeling of Complex Systems, ESAIM: Proceedings and Surveys, vol. 47, pp. 17–35. EDP Science, Les Ulis (2014)
Carrillo, J.A., Choi, Y.-P., Mucha, P.B., Peszek, J.: Sharp conditions to avoid collisions in singular Cucker–Smale interactions. Nonlinear Anal. Real World Appl. 37, 317–328 (2017)
Carrillo, J.A., Fornasier, M., Rosado, J., Toscani, G.: Asymptotic flocking dynamics for the kinetic Cucker–Smale model. SIAM J. Math. Anal. 42, 218–236 (2010)
Cheng, Y., Gamba, I.M., Majorana, A., Shu, C.-W.: A discontinuous Galerkin solver for Boltzmann–Poisson systems in nano devices. Comput. Methods Appl. Mech. Eng. 198, 3130–3150 (2009)
Choi, Y.-P., Ha, S.-Y., Li, Z.: Emergent dynamics of the Cucker–Smale flocking model and its variants. In: Bellomo, N., Degond, P., Tadmor, E. (eds.) Active Particles vol 1-Theory, Models, Applications. Modeling and Simulation in Sciences and Technology. Springer, Birkhauser (2017)
Choi, Y.P., Zhang, X.: One dimensional singular Cucker–Smale model: uniform-in-time mean-field limit and contractivity. J. Differ. Equ. 287, 428–459 (2021)
Ciarlet, P.-G.: The Finite Element Methods for Elliptic Problems. North-Holland, Amsterdam (1975)
Cockburn, B., Shu, C.-W.: Runge–Kutta discontinuous Galerkin methods for convection-dominated problems. J. Sci. Comput. 16, 173–261 (2001)
Cockburn, B., Shu, C.-W.: TVB Runge–Kutta local projection discontinuous Galerkin finite element method for conservation law II: general framework. Math. Comput. 52, 411–435 (1989)
Cucker, F., Dong, J.-G.: Avoiding collisions in flocks. IEEE Trans. Automat. Control 55, 1238–1243 (2010)
Cucker, F., Dong, J.-G.: On flocks influenced by closest neighbors. Math. Models Methods Appl. Sci. 26, 2685–2708 (2016)
Cucker, F., Dong, J.-G.: On flocks under switching directed interaction topologies. SIAM J. Appl. Math. 79, 95–110 (2019)
Cucker, F., Mordecki, E.: Flocking in noisy environments. J. Math. Pures Appl. 89, 278–296 (2008)
Cucker, F., Smale, S.: On the mathematics of emergence. Jpn. J. Math. 2, 197–227 (2007)
Cucker, F., Smale, S.: Emergent behavior in flocks. IEEE Trans. Automat. Control 52, 852–862 (2007)
Dong, J.-G., Qiu, L.: Flocking of the Cucker–Smale model on general digraphs. IEEE Trans. Automat. Control 62, 5234–5239 (2017)
Dalmao, F., Mordecki, E.: Cucker–Smale flocking under hierarchical leadership and random interactions. SIAM J. Appl. Math. 71, 1307–1316 (2011)
Dalmao, F., Mordecki, E.: Hierarchical Cucker–Smale model subject to random failure. IEEE Trans. Automat. Control 57, 1789–1793 (2012)
Erban, R., Haskovec, J., Sun, Y.: On Cucker–Smale model with noise and delay. SIAM J. Appl. Math. 76, 1535–1557 (2016)
Filbet, F., Shu, C.-W.: Discontinuous Galerkin methods for a kinetic model of self-organized dynamics. Math. Models Methods Appl. Sci. 28(6), 1171–1197 (2018)
Fornasier, M., Haskovec, J., Toscani, G.: Fluid dynamic description of flocking via Povzner–Boltzmann equation. Physica D 240, 21–31 (2011)
Gottlieb, S., Shu, C.-W.: Total variation diminshing Runge–Kutta schemes. Math. Comput. 67, 73–85 (1998)
Gottlieb, S., Shu, C.-W., Tadmor, E.: Strong stability preserving high-order time discretization methods. SIAM Rev. 43, 89–112 (2001)
Ha, S.-Y., Kim, J., Ruggeri, T.: From the relativistic mixture of gases to the relativistic Cucker–Smale flocking. Arch. Ration. Mech. Anal. 235, 1661–1706 (2020)
Ha, S.-Y., Lee, K., Levy, D.: Emergence of time-asymptotic flocking in a stochastic Cucker–Smale system. Commun. Math. Sci. 7, 453–469 (2009)
Ha, S.-Y., Liu, J.-G.: A simple proof of Cucker–Smale flocking dynamics and mean field limit. Commun. Math. Sci. 7, 297–325 (2009)
Ha, S.-Y., Tadmor, E.: From particle to kinetic and hydrodynamic description of flocking. Kinet. Relat. Models 1, 415–435 (2008)
Ha, S.-Y., Ruggeri, T.: Emergent dynamics of a thermodynamically consistent particle model. Arch. Ration. Mech. Anal. 223, 1397–1425 (2017)
Jadbabaie, A., Lin, J., Morse, A.S.: Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 48, 988–1001 (2003)
Li, Z., Ha, S.-Y.: On the Cucker–Smale flocking with alternating leaders. Q. Appl. Math. 73, 693–709 (2015)
Li, Z., Xue, X.: Cucker–Smale flocking under rooted leadership with fixed and switching topologies. SIAM J. Appl. Math. 70, 3156–3174 (2010)
Motsch, S., Tadmor, E.: A new model for self-organized dynamics and its flocking behavior. J. Stat. Phys. 144, 923–947 (2011)
Mucha, P.B., Peszek, J.: The Cucker–Smale equation: singular communication weight, measure-valued solutions and weak-atomic uniqueness. Arch. Ration. Mech. Anal. 227, 273–308 (2018)
Peszek, J.: Existence of piecewise weak solutions of a discrete Cucker–Smale’s flocking model with a singular communication weight. J. Differ. Equ. 257, 2900–2925 (2014)
Poyato, D., Soler, J.: Euler-type equations and commutators in singular and hyperbolic limits of kinetic Cucker–Smale models. Math. Models Methods Appl. Sci. 27, 1089–1152 (2017)
Ru, L., Li, Z., Xue, X.: Cucker–Smale flocking with randomly failed interactions. J. Frankl. Inst. 352, 1099–1118 (2015)
Reynolds, C.W.: Flocks, herds, and schools. Comput. Graph. 21, 25–34 (1987)
Tan, C.: A discontinuous Galerkin method on kinetic flocking models. Math. Models Methods Appl. Sci. 27, 1199–1221 (2017)
Toner, J., Tu, Y.: Flocks, herds and Schools: a quantitative theory of flocking. Phys. Rev. E 58, 4828–4858 (1988)
Vicsek, T., Czirók, A., Ben-Jacob, E., Cohen, I., Shochet, O.: Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 75, 1226–1229 (1995)
Vicsek, T., Zefeiris, A.: Collective motion. Phys. Rep. 517, 71–140 (2012)
Acknowledgements
The work of S.-Y. Ha was supported by National Research Foundation of Korea (NRF-2020R1A2C3A01003881). The work of F. Gargano and V. Sciacca has been partially supported by GNFM of INdAM and the grant PRIN2017 2017YBKNCE: “Multiscale phenomena in Continuum Mechanics: singular limits, off-equilibrium and transitions”. The authors F. Gargano and V. Sciacca has been also partially supported by the University of Palermo (via FFR personal grants).
Funding
Open access funding provided by Università degli Studi di Palermo within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Dedicated to the memory of prof. Salvatore Rionero.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gargano, F., Ha, SY. & Sciacca, V. On the stability and convergence of a semi-discrete discontinuous Galerkin scheme to the kinetic Cucker–Smale model. Ricerche mat 73 (Suppl 1), 157–187 (2024). https://doi.org/10.1007/s11587-023-00791-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11587-023-00791-z