
Abstract
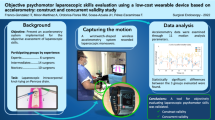
Purpose
For an in-depth analysis of the learning benefits that a stereoscopic view presents during endoscopic training, surgeons required a custom surgical evaluation system enabling simulator independent evaluation of endoscopic skills. Automated surgical skill assessment is in dire need since supervised training sessions and video analysis of recorded endoscope data are very time-consuming. This paper presents a first step towards a multimodal training evaluation system, which is not restricted to certain training setups and fixed evaluation metrics.
Methods
With our system we performed data fusion of motion and muscle-action measurements during multiple endoscopic exercises. The exercises were performed by medical experts with different surgical skill levels, using either two or three-dimensional endoscopic imaging. Based on the multi-modal measurements, training features were calculated and their significance assessed by distance and variance analysis. Finally, the features were used automatic classification of the used endoscope modes.
Results
During the study, 324 datasets from 12 participating volunteers were recorded, consisting of spatial information from the participants’ joint and right forearm electromyographic information. Feature significance analysis showed distinctive significance differences, with amplitude-related muscle information and velocity information from hand and wrist being among the most significant ones. The analyzed and generated classification models exceeded a correct prediction rate of used endoscope type accuracy rate of 90%.
Conclusion
The results support the validity of our setup and feature calculation, while their analysis shows significant distinctions and can be used to identify the used endoscopic view mode, something not apparent when analyzing time tables of each exercise attempt. The presented work is therefore a first step toward future developments, with which multivariate feature vectors can be classified automatically in real-time to evaluate endoscopic training and track learning progress.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
While endoscopic surgery has many advantages over traditional open surgery in terms of blood loss, length of stay, etc. [1], the increased degree of complexity compels residents in training for cardiac surgery to dedicate their free time to training and preparation. Minimal-invasive procedures can be simulated and prepared for in mock-up operations, done with the proper endoscopic instruments on phantoms equipped with camera systems [2].
With additional image depth information adjustment to the unusual visual feedback would be shortened and the improvement of the instrument handling settle in earlier.
To evaluate the skill improvement that trainees achieve through multiple endoscopic training exercises and highlight the differences caused by the additional depth information, a system for the multivariate comparison of 2D and 3D endoscopic training was developed. Multiple studies have focused on the skill assessment by employing time-consuming scoring systems which are dependent on additional personnel, hence, this paper focuses on the development and utilization of an automated skill assessment system [3,4,5,6]. The Simball Box or research and development results like TrEndo provide skill assessment by instrument tracking, continuous attachment of instruments restrict alterations of the training setup and can interfere training through altered instrument handling [7,8,9]. Analyzing multiple motion analysis parameters (MAP) through instrument tracking with additional sensors or colored markers and image analysis pose smaller influences on the tools' characteristic behavior, yet, are inefficient due to instrument modification and simulator-dependent software adjustments [10,11,12,13,14]. Determining instrument positions and angles by edge detection alone forgoes the problem entirely, the necessary image processing increases the complexity of the system, decreases reliability in altered circumstances, and decreases portability to different phantom trainers [15,16,17,18,19].
Other works focus on the analysis of the training motions using motion data fusion of time-of-flight, inertial measurement, and infrared sensor data of the upper body posture as well as instrument movement [20, 21]. Furthermore, superficial electromyography (sEMG) concluded that [22] sEMG frequency shifts and decreases in activation potential can help monitor performance and skill acquisition in a meaningful quantitative way [23,24,25,26]. The combination of sEMG data with instrument tracking data was shown to be successful for surgical instrument recognition [27, 28]. Beyond skill assessment Siu et al. developed a method for automatic training optimization, tailoring exercise sessions and schedules according to skill level and desired development, to improve laparoscopic training and support medical staff during changes of operation theater, from civilian to military or vice versa [29].
In conclusion, a multivariate measurement setup, focusing on body motion and electromyography, should monitor training progress well enough, to detect and evaluate learning curve progress. The contributions of this work are the presentation of a simulator-independent system for multivariate training evaluation, processing of synchronously captured data to extract training metrics or features, and the analysis of features significances regarding temporal and endoscope-dependent differences.
Methods
Study design
The study was carried out at the Leipzig Heart Center and included 15 volunteering medical experts of different specializations and different levels of experience, divided into two groups. All participants were either practicing or studying a surgical profession. The corresponding ethics committee approved the presented study which complies with the Declaration of Helsinki (ethics approval number: EA2/064/19). Each participant was informed about the study’s purpose and procedure in detail. One group used the 2D endoscope and consisted of seven volunteers, while the other group employed the 3D stereoscopic endoscope mode and consisted of eight volunteers. Endoscopic exercises were performed on a fixed piece of cloth surrounded by artificial leather inside an endoscopic phantom, a simulator which had to be interacted with by hand, hence no additional robotic systems were used during this study.
An endoscopic camera image of each exercise task is presented in Fig. 1, all selected tasks of this study have been validated on simulators for minimally invasive surgery before [30,31,32,33]. For the first task, participants had to use endoscopic grasping forceps and place six small plastic pegs onto six needles fixed on a circular cloth piece inside the phantom. Participants had to pick up and stack two pegs on three needles. Afterward, three plastic pegs were to be restacked onto the upper three needles. The second task was surgical needle-passing, which had to be repeated three times per attempt. To complete the attempt successfully, the needle needed to be positioned under the leather and driven through it. Afterward, it was to be passed to a needle driver in the off-hand and pulled through with a circular wrist movement. The third and final exercise required two perforations with threaded suture needles, with the addition that a thread, connected to each needle, had to be fastened in clasps outside the phantom.

Overview of exercises performed on the phantom module during training study; a first exercise, bimanual carrying of 2 pegs over one lower needle each, afterwards restack one peg over one upper needle b second exercise, needle passing through the artificial leather of the phantom c needle passing with suture thread through the artificial leather and subsequent thread mounting on the outside
The Myo armband requires an initial maximum voluntary contraction for the setup, which was performed by each participant through an initial calibration process once. The armband was not unequipped until all exercises and attempts were concluded. Each exercise attempt was initiated and concluded with a synchronizing gesture, i.e. an elevation of the main hand and arm. Exercises were repeated nine times, featuring a small break after every third attempt. For each attempt, the time to completion of the task was measured. In case the time of the exercise attempt reached 90 s, the attempt was aborted.
Data collection
Data collection was done continuously for three attempts. The authors chose a Myo armband for recording sEMG data and the Microsoft Kinect for the tracking of body and limb movement. For measurements, the Myo Gesture Control Armband was placed on the prominent bulge of the lower arm where the main muscle mass is formed [34]. For subsequent analysis, all endoscopic videos were recorded and stored as well. The devices were used in an internet of things, developed with the Message Queuing Telemetry Transport (MQTT) protocol. Device communication and data processing is summarized in Fig. 2.

System design for multivariate laparoscopic training evaluation
Statistical analysis
For data visualization and analysis, Matlab 2018b (MathWorks, Natick, USA) was employed. The gathered data of each participant was separated into nine data sequences per exercise by manually marking the points in time during which the arm raises occurred and extracting all measured data between the marked timestamps, as shown in Fig. 3. Separated Kinect and Myo measurements were used for the calculation of features, with which each exercise attempt can be represented. An overview of the chosen features with respective descriptions is presented in Table 1 with bold sEMG feature names signifying features that were averaged by the sEMG sample number of each attempt. In total, each attempt was represented by 160 different metrics. All sEMG features were calculated eight times, once for each sEMG channel, and all motion analysis parameters (MAPs) were calculated for each body part (head, spine/shoulders, left elbow, left wrist, left hand, right elbow, right wrist, right hand). After feature extraction, corrupted and incomplete data from three volunteers was excluded from further analysis.

Right-Hand-Y-Position-Curve of 3 exercise attempts, recorded in one file; the curve (blue) of the right hand Y-position in the Kinect recording shows the synchronization gesture, i.e. hand raises, as an increase in the Y-position (red rectangles with dashed lines) at the beginning and end of each attempt (green rectangles with straight lines)
RANOVA analysis
To determine significant features for the distinction of training progress as well as possible differentiation between the two endoscope groups, a Repeated measure ANalysis Of VAriance (RANOVA) was used. The basis for model construction were the feature tables with the attempt number marking the columns and the participant numbers and their endoscope type marking the rows. The participant numbers have been omitted during the model construction. Models for repeated measurements were constructed, focusing on a sequence of attempts (1–3, 4–6, 7–9), termed session, spanning over all participants and the respective attempt numbers. The resulting models were created by combining three columns and all table row entries of one feature. Afterward, the RANOVA-p-values were calculated with epsilon correction according to Huynh–Feldt [35].
Feature distance calculation
For distance calculation between 2 and 3D feature results all values resulting from one kind of feature calculation were collected in one metric-specific vector per exercise and endoscope type. Afterward, the elements of each metric-specific vector with 2D values were used to calculate the median distance towards each 3D feature vector of the same exercise, resulting in 160 × 160 distance calculations per exercise. With i as address index for the 2D metric-specific vector \({x}_{2D}\) and j as address index for the 3D metric-specific vector \({x}_{3D}\), the Euclidean distance \({d}_{Eij}\) between two elements from different vectors was calculated accordingly to Eq. 1.
Additionally, with the calculation of the covariance matrix \(C\) between the two vectors, the Mahalanobis distance \(d_{Mij}\) was calculated accordingly to Eq. 2.
The distance values per comparison were accumulated in an array with ascending value order. As a result, from this comparison, the median value of the distance array was selected and stored as a representative value for the distance calculation. Furthermore, for a more efficient distance comparison, certain feature calculations were combined. To achieve this, the results of each of the six tables (two distance maps for each exercise) containing the comparison parameters, were averaged based on their affiliation which is either body part or sEMG feature. Comparison results based on sEMG values were averaged over the eight channels, resulting in one distance value per sEMG feature calculation. As for Kinect values, comparison results of each body part were averaged.
Classification
For the final analysis, a classification of the feature vectors for each attempt was performed, training multiple models to predict the endoscope type, which was in use during the exercise attempt of the respective feature vector. For each exercise, feature vectors were accumulated and divided into the target groups, i.e. Ex1_2D and Ex1_3D for data recorded while using either 2D or 3D endoscope during the first exercise. Before classification, all features were normalized according to the maximum and minimum overall attempts of all participants per exercise. Concluding this calculation, models for classification were trained with the classification toolbox, provided by Matlab. As a first step, each table containing the normalized features was used for the training of support vector machine (SVM), k-nearest-neighbor (KNN), decision tree models (DT), and multiple different ensemble variants.
Results
Study
Over two days, 15 volunteers joined the study and attempted to complete the defined tasks. The respective times of each attempt per volunteer and exercise are collected in the supplementary material document, Table SI to Table SXV.
Data collection
Resulting from the recordings during training and the following data separation, the complete study yielded 402 datasets of different lengths, from which 81 datasets of three participants (9 attempts, 3 exercises, 3 participants) were excluded, due to transmission issues and data corruption. Further analysis procedures were executed with 160 feature calculations for overall 324 attempts (12 volunteers, 3 exercises, 9 attempts), accumulated in 160 feature tables per exercise type, having 9 columns and 12 rows.
Statistical analysis
RANOVA analysis
The RANOVA analysis resulted in multiple p-Values describing significance in time or significance in time and between the two groups. Figure 4 shows the resulting boxplot of exercise 3, after the RANOVA calculation of each repeated model, generated from the partial feature tables. Each boxplot shows the RANOVA p-Values after epsilon correction according to Huynh and Feldt, divided into the corresponding session group the metric significance according to time-dependent evolvement as well as time and endoscope differentiation [35]. Boxplot values were converted to their negative logarithmic values (base 10) as well as three ticks on the Y-Axis, marking significance thresholds 0.05%, 0.01% and 0.001% (the ticks value being 1.3010, 2, and 3 respectively) While most whiskers reach above it, only the endoscope-dependent p-Values of session 1 (Ses. 1: Time/Endo) and the time-dependent p-Values of session 3 (Ses. 3: Time) do not feature an upper whisker above 0.05%. All boxplots show outliers far beyond 0.01% significance, with every time-dependent calculation exceeding 0.001%. As an example for repeatedly high significance, outliers belonging to the feature Vel_Elbow_Left have been highlighted with dashed circles.

Boxplots representing RANOVA p-Value calculation results for each session of exercise 1, representing significance depending on time and the combination of time and the used endoscope type; outliers circled with dashed orange lines represent the reoccurring high p-Value of the feature Velocity ElbowL
RANOVA p-Value calculation of exercise 1 (Fig. S1) is displayed in Fig. S1 as part of the supplementary material. Only the boxplots of session 3 have whiskers above the 0.05% significance threshold, while all RANOVA calculations of the different sessions have outliers above 0.05% and 0.01% with time-dependent calculations of session 1 and session 3 feature p-Values exceeding the 0.001% threshold. Results in Fig. S2 show, that all calculations led to outliers above the 0.05% threshold and all time-dependent boxplots have outliers above the threshold marking 0.001% significance, yet none of the upper whiskers exceed 0.05%. Of the endoscope-dependent results, only the first two sessions feature outliers above 0.01%.
Feature distance calculation
Further significance analysis was performed through the calculation of distances between the metric-specific vectors, which resulted in 25,600 comparison values per exercise for each distance calculation algorithm. The distance calculation between metric-specific vectors resulted in six different heatmaps, consisting of the comparison results between the 2D and 3D metric-specific vectors, simplified to visualize averaged sEMG-feature-specific distances and averaged joint-specific distances.
Figure 5 presents the distance heatmap of exercise 3, calculated according to the Euclidean distance algorithm. All rows are ordered descending in their mean value from top to bottom, columns are ordered descending from right to left.

Heatmap visualizing the averaged Euclidean distances between 2D values and 3D values of the features for the exercise 3 dataset; Y-Axis contains the averaged 2D metric-specific feature vector which were used for element-wise comparison with the 3D metric-specific feature vector
In Fig. 5 the features with the highest distance between 2 and 3D are VMax, followed by VMin, and the subsequent difference between the two, VRange. The three features with the lowest average distance per row are, in ascending order, fMin, the FES, and ElbowR. The columns with the smallest average value are fMin, FES and fRange. Fig. S3, located in the supplementary materials, contains all heatmaps for visual comparison of the chosen features. As is the case with exercise 3, the plot of exercise 1 and exercise 2 show that the rows and columns with the highest mean distance are VMax, VMin, and VRange.
Figure 6 is an excerpt of Fig. S4 in the supplementary material and shows median differences between each metric-specific vector, calculated according to the Mahalanobis distance. The 2D metric-specific vector with the most occurrences of high median distances is VSSC, followed by POC and WristL at third place. The columns and thereby metric-specific 3D vectors with the overall highest amount of large median distances are ElbowL, POC, and HandL. For exercise 1 in Fig. S4 the largest row values of distant comparisons are caused by the metric POC, V, and VRange, while VMax, VRange, and VMin are the features with the highest mean distance column-wise. Distance calculation results of Exercise 2 have a similar distribution, with VZC, VMax, and VRange being at the top of the 2D distance order, while ElbowL, POC, VMax are at the top of the 3D feature order.

Heatmap visualizing the averaged Mahalanobis distances between 2D values and 3D values of the features for the exercise 3 dataset; Y-Axis contains the averaged 2D metric-specific feature vector which were used for element-wise comparison with the 3D metric-specific feature vector
Classification
The accuracy rates of the classification are shown in Table 2. The most left column shows the classification learner, the columns from 2nd to left until the far right shows the respective accuracy rate of each classification per exercise. Results alternate column-wise between classifications made with all available features and classifications made with only 15% of the most distant features. The highest percentage of right classifications of each column is highlighted grey. With all features, the accuracy rating for correct endoscope type prediction achieved 98.1% (exercise 1 with cubic SVM), 93.5% (exercise 2 with quadratic SVM), and 93.5% (exercise 3 with bagged DT ensemble).
Feature selection led to a feature space with 36 (exercise 1), 38 (exercise 2), and 39 (exercise 3) features. After leaving out features that do not reach the upper 15% of the distance values, the largest classification result difference was with the dataset of exercise 2 dropping by 11.1%.
The highest rate of correct predictions with a smaller feature space is, in order of exercise number, 88.9% (SVM Quadratic, Gaussian SVM Medium, Fine KNN), 82.4% (bagged DT ensemble), and 92.6% (bagged DT ensemble).
Discussion
Study
The results of the study were achieved over two days with multiple recording sessions, yet the yielded data is sparse. The number and especially the duration of each attempt should be increased considerably, not only to increase dataset size but also to give volunteers a larger amount of time to adjust to the task and allow for the training effect to settle more properly. The way this study was planned and executed, volunteers had little time to adjust to the task and enter a proper training mindset. Even skilled surgeons needed time to adjust to the exercises, a problem partly caused by the nature of the tasks being more relevant to beginner surgeons than already trained professionals accustomed to more complex methods.
Data collection
The system provided the considerable advantage of synchronizing all data in real-time automatically and during recording. The data loss that occurred during this study was largely due to communication problems between the devices and the MQTT broker, a problem that needs to be addressed through additional safety measures and more development time.
Statistical analysis
RANOVA analysis
The results of the RANOVA analysis show that some features exceed the chosen threshold and can be considered to possess a high significance. This supports the hypothesis that the proposed system and certain calculated features can be used as means to represent and analyze the learning progress during endoscopic training. Additionally, the results can be used to mark a difference between the use of 2D and 3D endoscopic view, however, looking at the measured times throughout the recorded tables (Table SI to Table SXV), the proposed progress does not reflect well in the actual time records, which might be attributed to the short exercise time and the little number of task attempts.
Analyzing the extracted, significant features and the RANOVA-p-Value trends of every exercise, we conclude that some features have a rising and falling significance, while some exceed the threshold during every session. Figure 4 shows the reoccurring significance of Velocity of the left Elbow, and the statistical impact its’ changes have on the progress during every session of exercise 3. As a continuous outlier of the time-dependent RANOVA, with all time-dependent p-Values under 0.01%, it can be safely assumed, that the feature is useful for the analysis of training progress with the proposed setup and the used exercises, at least in the early stages. Similar significant features exist, yet their time- and endoscope-dependent significance rise above and fall below the different significance thresholds. This may be attributed to the learning process as well, causing former significant features to lose informational value once the trainee reached a skill level. With the feature only being of importance during the first few tries and ceasing to visualize made progress once a certain degree of competence has been reached, the acquisition of a certain skill level can be marked with the irrelevance of the feature or, vice versa, the increase of significance in features with no former informational value. Dependent on what features show significant behavior during the training, it could be concluded what kind of skill level the trainee possesses at the start of the training session, how it changes during the session, and that a feature space is justified. This could allow for the interpretation of how well a trainee progressed throughout an overall training schedule, comparing session results, and allow for a qualified assessment of the usefulness of exercises, similar to Siu et al. [29].
Feature distance calculation
The results of the median calculation for the distances show, that the system can be used to evaluate combined data and distinguish between 2D-endoscopic and 3D-endoscopic vision during endoscopic training. The repeatedly high distances of amplitude describing sEMG features like VMax and the continuously prominent VZC in Fig. S3 prove their significance when differentiating between the two endoscope types. The calculation algorithms result in different distance distributions, with the heatmaps based on Euclidean distance calculation showing more prominent gradients between the highest and the medium distances, noticeable at the border between VRange and VSSC at the y-axis of Fig. 5. Features with high distances are very distinctive and an analysis of the top 15% distance comparison reveals, that no distance map of Sig. S3 has more than 1/5th of the comparisons reaching the 85% of the maximum distance. This emphasizes their influence in the differentiation between the two endoscopic view modes (2D and 3D endoscope), that while not apparent in the time records, seem to have an influence on sEMG and some motion-related metrics.
The distance distributions in the heatmaps in Fig. 6 and Fig. S4 are more uniform with decreased gradients between ordered comparison results. While favorites for analyzing data between and the prediction of the endoscopic types are not as distinctive as they were in the Euclidean distance maps, reoccurring high distance values for amplitude-related sEMG features emphasize their significance and the relevance of the different muscle activation amplitudes during the training session.
Classification
The classification results proved, that there are distinctive differences between the endoscopic uses, which reflect in the measured motion- and muscle-related data. The high values of right predictions among the different classification learners support the claim, that the proposed setup and methods enable an endoscopic training analysis, which can also provide analysis results that do not reflect in simple time measurements.
The highest rate of correct predictions was achieved with the dataset of exercise 1, leading to the conclusion, that the difference in endoscope use is more apparent in exercise 1 than in exercises 2 and 3. This might be due to the fact, that exercises 2 and 3 resemble parts of actual surgical techniques and provide familiar actions. Exercise 1 is more abstract with nine depth-based stacking tasks instead of maximal 3 needle passing procedures, making the effects of the improved view provided by the 3D endoscope more apparent. Another factor for the decrease in the possible distinction between 2 and 3D, occurring in the later exercises, could be the learning effect, through which the trainees also grow more accustomed to the endoscopic view and the laparoscopic exercise. Volunteers using the 2D endoscope would struggle less after their first attempts at laparoscopic training during the first task and the initial benefit of the stereoscopic view would decrease. It can be argued that the trainees already made small progress in the learning curve, had a better sense for the instrument positions, required less focus on their depth approximation in the 2D image, and approached efficiency they would have had when provided with the stereoscopic view.
Conclusion
The work presented in this paper focused on the analysis of data acquired with a multimodal device setup. The results largely support the claim, that the chosen approach and the used setup are well-suited to identify and emphasize progress in a trainee’s surgical skill, familiarity with the exercise, and conscious as well as subconscious control over the endoscopic instrument. The proposed device combination is a basis for a system, usable for the evaluation of the learning progress during endoscopic surgery training at any desired trainer. Analysis of the multimodal data enabled the identification of features well suited for the differentiation between data recorded during 2D endoscope and data recorded during 3D endoscope training. A proof-of-concept classification with classification learners resulted in accuracy results reaching up to 98.1% for 2D/3D classification. Leaving out features, following significance analysis results, the highest achieved classification was 92.6%. In conclusion, results from the training measurements and the classification of the calculated features support the claim, that the automatic, multimodal observation and evaluation of endoscopic training with the proposed setup is valid.
Yet the initial work is inconclusive, especially regarding the evaluation of actual learning progress, largely due to the limited size of the training data. The attempts per exercise were too few with not enough time per attempt. The next steps are improvement of communication stability, enabling real-time feature analysis, and conducting a study with more exercise attempts, larger time frames, and more volunteers.
Availability of data and materials
The datasets generated and analyzed during the current study are available from the corresponding author on reasonable request.
Code availability
The entire code for the system setup, feature calculations, and subsequent analysis is available from the corresponding author on reasonable request.
References
Van Praet KM, Kempfert J, Jacobs S, Stamm C, Akansel S, Kofler M, Sündermann SH, Nazari Shafti TZ, Jakobs K, Holzendorf S, Unbehaun A, Falk V (2021) Mitral valve surgery: current status and future prospects of the minimally invasive approach. Expert Rev Med Devices 18:245–260. https://doi.org/10.1080/17434440.2021.1894925
Madan AK, Frantzides CT (2007) Prospective randomized controlled trial of laparoscopic trainers for basic laparoscopic skills acquisition. Surg Endosc 21:209–213. https://doi.org/10.1007/s00464-006-0149-6
Vassiliou MC, Feldman LS, Andrew CG, Bergman S, Leffondré K, Stanbridge D, Fried GM (2005) A global assessment tool for evaluation of intraoperative laparoscopic skills. Am J Surg 190:107–113. https://doi.org/10.1016/j.amjsurg.2005.04.004
Chang OH, King LP, Modest AM, Hur H-C (2016) Developing an objective structured assessment of technical skills for laparoscopic suturing and intracorporeal knot tying. J Surg Educ 73:258–263. https://doi.org/10.1016/j.jsurg.2015.10.006
Gumbs AA, Hogle NJ, Fowler DL (2007) Evaluation of resident laparoscopic performance using global operative assessment of laparoscopic skills. J Am Coll Surg 204:308–313. https://doi.org/10.1016/j.jamcollsurg.2006.11.010
Duarte RJ, Cury J, Oliveira LCN, Srougi M (2013) Establishing the minimal number of virtual reality simulator training sessions necessary to develop basic laparoscopic skills competence: evaluation of the learning curve. Int Braz J Urol 39:712–719. https://doi.org/10.1590/S1677-5538.IBJU.2013.05.14
Hagelsteen K, Sevonius D, Bergenfelz A, Ekelund M (2016) Simball box for laparoscopic training with advanced 4D motion analysis of skills. Surg Innov 23:309–316. https://doi.org/10.1177/1553350616628678
Chmarra MK, Bakker NH, Grimbergen CA, Dankelman J (2006) TrEndo, a device for tracking minimally invasive surgical instruments in training setups. Sens Actuators Phys 126:328–334. https://doi.org/10.1016/j.sna.2005.10.040
Minor A, Lorias D, Ortiz Simon EF (2011) Intelligent mechatronic system for automatically evaluating the training of the laparoscopic surgeon. Intell Mechatron. https://doi.org/10.5772/15987
Allen B, Nistor V, Dutson E, Carman G, Lewis C, Faloutsos P (2010) Support vector machines improve the accuracy of evaluation for the performance of laparoscopic training tasks. Surg Endosc 24:170–178. https://doi.org/10.1007/s00464-009-0556-6
Falk V, Mintz D, Grunenfelder J, Fann JI, Burdon TA (2001) Influence of three-dimensional vision on surgical telemanipulator performance. Surg Endosc 15:1282–1288. https://doi.org/10.1007/s004640080053
Pérez F, Sossa H, Martínez R, Lorias D, Minor A (2013) Video-based tracking of laparoscopic instruments using an orthogonal webcams system. 7:4
Pérez-Escamirosa F, Chousleb-Kalach A, del Hernández-Baro MC, Sánchez-Margallo JA, Lorias-Espinoza D, Minor-Martínez A (2016) Construct validity of a video-tracking system based on orthogonal cameras approach for objective assessment of laparoscopic skills. Int J Comput Assist Radiol Surg 11:2283–2293. https://doi.org/10.1007/s11548-016-1388-1
Pérez-Escamirosa F, Alarcón-Paredes A, Alonso-Silverio GA, Oropesa I, Camacho-Nieto O, Lorias-Espinoza D, Minor-Martínez A (2020) Objective classification of psychomotor laparoscopic skills of surgeons based on three different approaches. Int J Comput Assist Radiol Surg 15:27–40. https://doi.org/10.1007/s11548-019-02073-2
Allen BF, Kasper F, Nataneli G, Dutson E, Faloutsos P (2011) Visual tracking of laparoscopic instruments in standard training environments. Stud Health Technol Inform 163:11–17. https://doi.org/10.3233/978-1-60750-706-2-11
Oropesa I, Sánchez-González P, Chmarra MK, Lamata P, Fernández A, Sánchez-Margallo JA, Jansen FW, Dankelman J, Sánchez-Margallo FM, Gómez EJ (2013) EVA: laparoscopic instrument tracking based on endoscopic video analysis for psychomotor skills assessment. Surg Endosc 27:1029–1039. https://doi.org/10.1007/s00464-012-2513-z
Yamaguchi T, Nakamura R (2018) Laparoscopic training using a quantitative assessment and instructional system. Int J Comput Assist Radiol Surg 13:1453–1461. https://doi.org/10.1007/s11548-018-1771-1
Lorias ED, Minor MA, Ortiz SJL, Olivares PVH, Gnecchi JA (2010) Computer system for the evaluation of laparoscopic skills. In: 2010 IEEE electronics, robotics and automotive mechanics conference. pp 19–22
Lorias D, Minor A, Gamino D, Ordorica R, Martínez R (2012) Integration of a system for evaluating in a box trainer: hybrid system for laparoscopic training. In: 2012 Pan American health care exchanges. pp 25–29
Lin Z, Uemura M, Zecca M, Sessa S, Ishii H, Tomikawa M, Hashizume M, Takanishi A (2013) Objective skill evaluation for laparoscopic training based on motion analysis. IEEE Trans Biomed Eng 60:977–985. https://doi.org/10.1109/TBME.2012.2230260
Kowalewski K-F, Hendrie JD, Schmidt MW, Garrow CR, Bruckner T, Proctor T, Paul S, Adigüzel D, Bodenstedt S, Erben A, Kenngott H, Erben Y, Speidel S, Müller-Stich BP, Nickel F (2017) Development and validation of a sensor- and expert model-based training system for laparoscopic surgery: the iSurgeon. Surg Endosc 31:2155–2165. https://doi.org/10.1007/s00464-016-5213-2
De Luca CJ (1984) Myoelectrical manifestations of localized muscular fatigue in humans. Crit Rev Biomed Eng 11:251–279
Keshavarz Panahi A, Cho S (2016) Prediction of muscle fatigue during minimally invasive surgery using recurrence quantification analysis. Minim Invasive Surg 2016:e5624630. https://doi.org/10.1155/2016/5624630
Nowakowski MM, Trybek P, Rubinkiewicz M, Cegielny T, Romaniszyn M, Pędziwiatr M, Machura Ł (2018) Upper extremity surface electromyography signal changes after laparoscopic training. Videosurgery Miniinvasive Tech 13:485–493. https://doi.org/10.5114/wiitm.2018.78744
Judkins TN, Narazaki K, Oleynikov D, Stergiou N (2005) Electromyographic frequency response of robotic laparoscopic training. In: 9th International conference on rehabilitation robotics, 2005. ICORR 2005. pp 418–421
Niu S, Jin K, Hu Z, Zhang C, Zhao D, Xing Y (2020) Ergonomic evaluation between laparoscopic and robotic surgery based on EMG. In: 2020 ieee international conference on mechatronics and automation (ICMA). pp 1756–1761
Kowalewski K-F, Garrow CR, Schmidt MW, Benner L, Müller-Stich BP, Nickel F (2019) Sensor-based machine learning for workflow detection and as key to detect expert level in laparoscopic suturing and knot-tying. Surg Endosc 33:3732–3740. https://doi.org/10.1007/s00464-019-06667-4
Bieck R, Fuchs R, Neumuth T (2019) Surface EMG-based surgical instrument classification for dynamic activity recognition in surgical workflows. Curr Dir Biomed Eng 5:37–40. https://doi.org/10.1515/cdbme-2019-0010
Siu K-C, Best BJ, Kim JW, Oleynikov D, Ritter FE (2016) Adaptive virtual reality training to optimize military medical skills acquisition and retention. Mil Med 181:214–220. https://doi.org/10.7205/MILMED-D-15-00164
Verberkmoes NJ, Verberkmoes-Broeders EMPC (2013) A novel low-fidelity simulator for both mitral valve and tricuspid valve surgery: the surgical skills trainer for classic open and minimally invasive techniques†. Interact Cardiovasc Thorac Surg 16:97–101. https://doi.org/10.1093/icvts/ivs451
Jebran A-F, Saha S, Waezi N, Al-Ahmad A, Niehaus H, Danner BC, Baraki H, Kutschka I (2019) Design and training effects of a physical reality simulator for minimally invasive mitral valve surgery. Interact Cardiovasc Thorac Surg 29:409–415. https://doi.org/10.1093/icvts/ivz112
Sardari Nia P, Daemen JHT, Maessen JG (2019) Development of a high-fidelity minimally invasive mitral valve surgery simulator. J Thorac Cardiovasc Surg 157:1567–1574. https://doi.org/10.1016/j.jtcvs.2018.09.014
Hasson HM, Kumari NV, Eekhout J (2001) Training simulator for developing laparoscopic skills. JSLS 5:255–265
Stegeman D, Hermens H (2007) Standards for suface electromyography: The European project Surface EMG for non-invasive assessment of muscles (SENIAM). 1:
Huynh H, Feldt LS (1976) Estimation of the box correction for degrees of freedom from sample data in randomized block and split-plot designs. J Educ Stat. https://doi.org/10.3102/10769986001001069
Funding
Open Access funding enabled and organized by Projekt DEAL. The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study's conception and design. Material preparation, data collection, and analysis were performed by KMVP, RB, and RF. The first draft of the manuscript was written by RF and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest. The authors have no relevant financial or non-financial interests to disclose.
Consent to participate
Informed consent was obtained from the participants included in the study.
Consent to publish
The participants have consented to the submission and the publication of data and video records.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fuchs, R., Van Praet, K.M., Bieck, R. et al. A system for real-time multivariate feature combination of endoscopic mitral valve simulator training data. Int J CARS 17, 1619–1631 (2022). https://doi.org/10.1007/s11548-022-02588-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02588-1